



-
摘要:
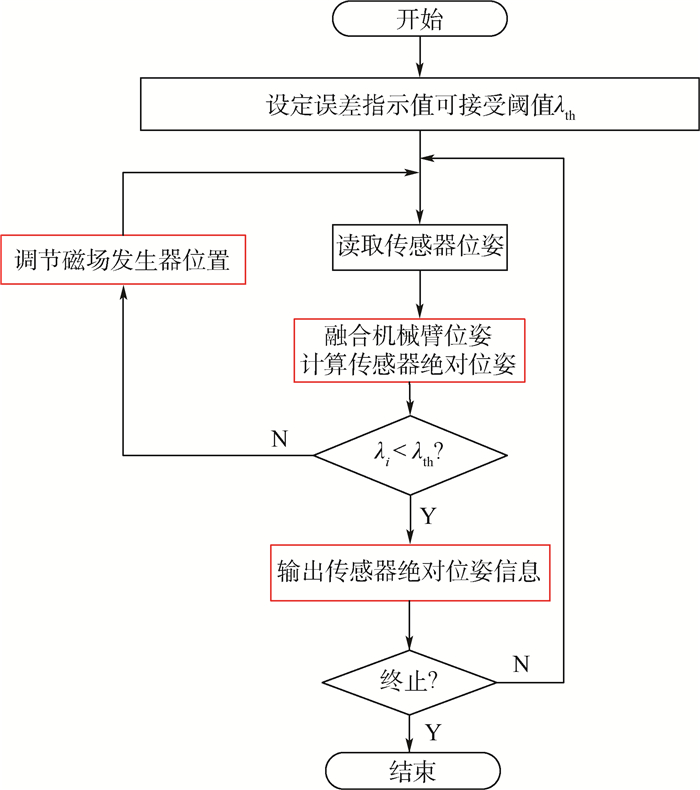
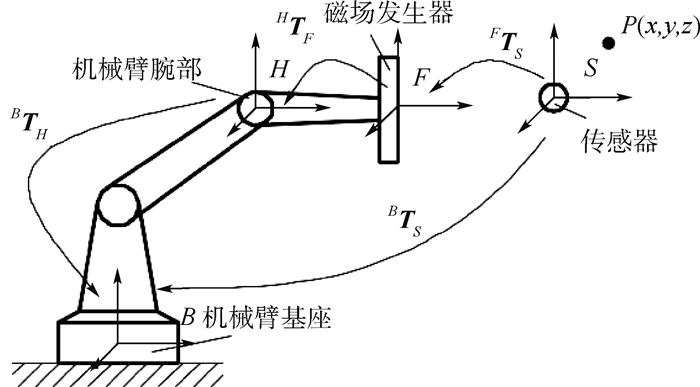
针对NDI电磁定位跟踪设备工作空间有限且在工作空间内定位精度不一致的问题,提出了一种利用机械臂移动磁场发生器从而拓展电磁定位系统工作空间且保证定位精度的方法。利用NDI系统返回的误差指示值衡量定位精度,当误差指示值超出设定的阈值时,利用机械臂移动磁场发生器使传感器重新位于NDI系统的最佳测量工作区,并将电磁定位系统测量的位姿通过空间变换方式统一到机械臂基座坐标系,从而在保证定位精度的同时也起到扩展工作空间的作用。为验证所提方法的有效性,通过实验验证定位误差与误差指标值及传感器到磁场发生器中心的距离成正相关关系;通过拓展前后的误差分析表明,所提方法能有效降低定位误差,平均位置误差从2.61 mm降低到1.34 mm,平均姿态误差从2.42°降低到1.37°。所提方法可应用于类似血管介入手术导管在大范围移动的器械定位与跟踪。
Abstract:Aimed at the problem of limited workspace and inconsistent measurement accuracy of NDI electromagnetic tracking equipment, a method for expanding the workspace of electromagnetic tracking system and guaranteeing measurement accuracy by moving magnetic field generator is proposed. This method uses the indicator value returned by NDI system as the measurement of accuracy. When the indicator value exceeds the set threshold, the magnetic field generator connected with the manipulator is moved to relocate the sensor in the optimum working area, and the position and attitude measured by the system are unified into the coordinate system of the manipulator base through spatial transformation. In order to verify the effectiveness of the proposed method, experiments are conducted to verify that the measurement error is positively correlated with the indicator value and the distance between the sensor and the center of the magnetic field generator. Then, by comparing the errors before and after the expansion, it is shown that the mean position error can be reduced from 2.61 mm to 1.34 mm, and the mean orientation error can be reduced from 2.42° to 1.37°. This method can be used to locate and track large-scale moving instruments such as vascular interventional catheters.
-

图 1 NDI电磁定位系统Aurora的组成
Figure 1. Composition of NDI Aurora electromagnetic tracking system

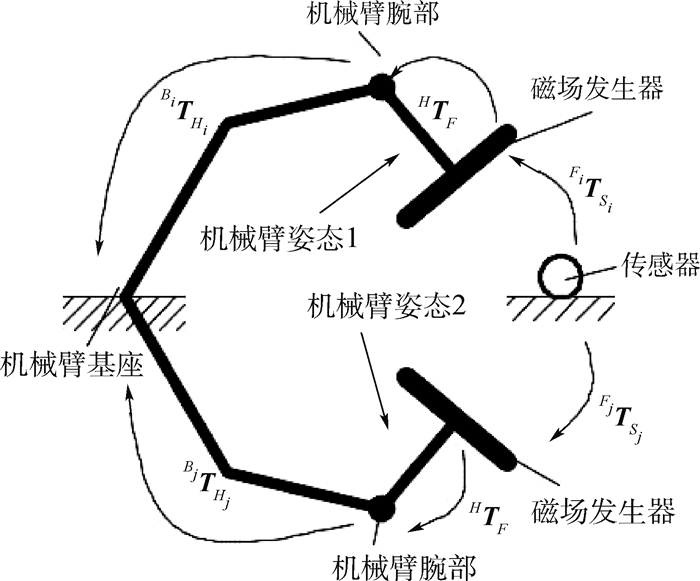
图 5 磁场发生器与机器人末端的转换矩阵标定
Figure 5. Calibration of conversion matrix between magnetic field generator and robot wrist

图 7 位置误差、姿态误差与误差指示值随传感器到磁场发生器中心距离的变化趋势
Figure 7. Variation trend of position error, orientation error and indicator value with distance from sensor to center of magnetic field generator

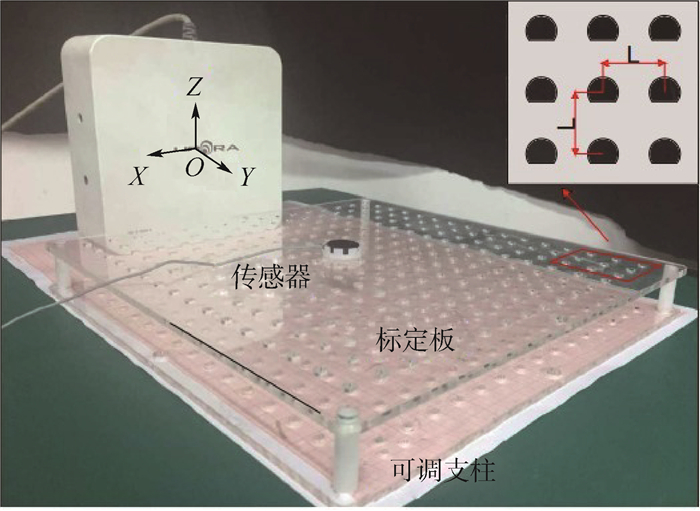
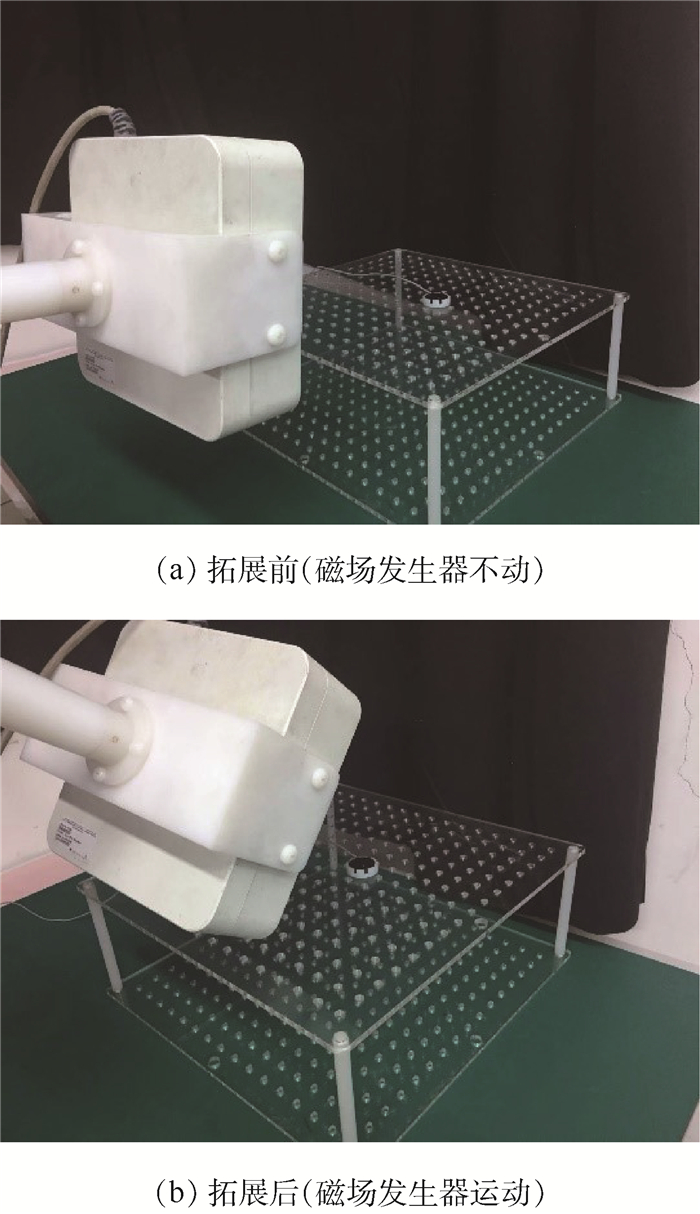
图 8 EM工作空间拓展验证实验模型
Figure 8. Experimental model of EM workspace expansion verification

图 10 EM工作空间拓展前后的姿态误差
Figure 10. Orientation error before and after EM workspace expansion
表 1 几种电磁定位产品主要性能指标
Table 1. Main performance indicators of several electromagnetic tracing products
产品 测量距离/mm 位置精度/mm 方位精度/(°) Aurora 500 1.6 1.1 Fastrak 762 0.762 0.15 Isotrak 762 2.54 0.75  下载: 导出CSV
下载: 导出CSV
表 2 不同平面拓展前后位置误差与姿态误差
Table 2. Position error and orientation error of different planes before and after expansion
Z/mm 拓展前位置误差/mm 拓展后位置误差/mm 拓展前姿态误差/(°) 拓展后姿态误差/(°) Mean SD Mean SD Mean SD Mean SD 0 2.74 0.71 1.34 0.28 2.36 1.13 1.41 0.41 90 2.42 0.64 1.28 0.19 2.29 1.25 1.32 0.28 150 2.68 0.65 1.39 0.22 2.62 1.38 1.37 0.32 平均值 2.61 0.67 1.34 0.23 2.42 1.25 1.37 0.34
下载: 导出CSV
-
[1] FRANZ A M, HAIDEGGER T, BIRKFELLNER W, et al.Electromagnetic tracking in medicine—A review of technology, validation, and applications[J].IEEE Transactions on Medical Imaging, 2014, 33(8):1702-1725. doi: 10.1109/TMI.2014.2321777 [2] BIRKFELLNER W.Calibration of tracking systems in surgical environment[J].IEEE Transactions on Medical Imaging, 1998, 17(5):737-742. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0a0e3fafff6f6d38459fe140da14c817 [3] PÉRIÉ D, TATE A J, CHENG P L, et al.Evaluation and calibration of an electromagnetic tracking device for biomechanical analysis of lifting tasks[J].Journal of Biomechanics, 2002, 35(2):293-297. doi: 10.1016/S0021-9290(01)00188-9 [4] FEUERSTEIN M, REICHL T, VOGEL J, et al.Magneto-optical tracking of flexible laparoscopic ultrasound:Model-based online detection and correction of magnetic tracking errors[J].IEEE Transactions on Medical Imaging, 2009, 28(6):951-967. doi: 10.1109/TMI.2008.2008954 [5] WALLACE M J, GUPTA S, HICKS M E.Out-of-plane computed-tomography-guided biopsy using a magnetic-field-based navigation system[J].Cardio Vascular and Interventional Radiology, 2006, 29(1):108-113. doi: 10.1007/s00270-005-0041-0 [6] KRVCKER J, XU S, GLOSSOP N, et al.Electromagnetic tracking for thermal ablation and biopsy guidance:Clinical evaluation of spatial accuracy[J].Journal of Vascular and Interventional Radiology, 2007, 18(9):1141-1150. doi: 10.1016/j.jvir.2007.06.014 [7] WOOD B J, ZHANG H, DURRANI A, et al.Navigation with electromagnetic tracking for interventional radiology procedures:A feasibility study[J].Journal of Vascular and Interventional Radiology, 2005, 16(4):493-505. doi: 10.1097/01.RVI.0000148827.62296.B4 [8] GERGEL I, GAA J, MVLLER M, et al.A novel fully automatic system for the evaluation of electromagnetic tracker[C]//Conference on Medical Imaging-Image-Guided Procedures, Robotic Interventions and Modeling.Bellingham: SPIE, 2012, 8316: 831608. [9] BOUTALEB S, RACINE E, FILLION O, et al.Performance and suitability assessment of a real-time 3D electromagnetic needle tracking system for interstitial brachytherapy[J].Journal of Contemporary Brachytherapy, 2015, 7(4):280-289. http://cn.bing.com/academic/profile?id=ae0451a026707f5c1dee61c5def52e97&encoded=0&v=paper_preview&mkt=zh-cn [10] KWARTOWITZ D M, RETTMANN M E, HOLMES D R, et al.A novel technique for analysis of accuracy of magnetic tracking systems used in image guided surgery[C]//Conference on Medical Imaging 2010-Visualization, Image-Guided Procedures, and Modeling.Bellingham: SPIE, 2010, 7625: 76251L. [11] 关少亚, 孟偲, 万元宇, 等.基于薄板样条函数的电磁定位系统位姿校正方法[J].北京航空航天大学学报, 2018, 44(11):2350-2355. https://bhxb.buaa.edu.cn/CN/abstract/abstract14640.shtmlGUAN S Y, MENG C, WAN Y Y, et al.A thin plate spline based method for correction of position and posture of electromagnetic tracking system[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11):2350-2355(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract14640.shtml [12] REICHL T, GARDIAZABAL J, NAVAB N.Electromagnetic servoing—A new tracking paradigm[J].IEEE Transactions on Medical Imaging, 2013, 32(8):1526-1535. doi: 10.1109/TMI.2013.2259636 [13] LUND K.Electromagnetic navigation vs fluoroscopy in aortic endovascular procedures—A phantom study[J].International Journal of Computer Assisted Radiology & Surgery, 2016, 12(1):1-7. https://www.researchgate.net/publication/305888202_Electromagnetic_navigation_versus_fluoroscopy_in_aortic_endovascular_procedures_a_phantom_study [14] VILLAGRAN C R T, IKEDA S, FUKUDA T, et al.Catheter insertion path reconstruction with autonomous system for endovascular surgery[C]//International Symposium on Computational Intelligence in Robotics & Automation.Piscataway, NJ: IEEE Press, 2007: 47. [15] 秦成.电磁跟踪系统的研究[D].武汉: 华中科技大学, 2013.QIN C.The research of electromagnetic tracking system[D].Wuhan: Huazhong University of Science and Technology, 2013(in Chinese). [16] 罗伟, 张庆, 李珊珊, 等.新一代Aurora电磁跟踪系统在医学手术导航中的应用[J].中国医疗器械杂志, 2013, 37(2):126-128. http://d.old.wanfangdata.com.cn/Periodical/zgylqxzz201302020LUO W, ZHANG Q, LI S S, et al.New generation Aurora electromagnetic tracking system in the medical surgical navigation[J].Chinese Journal Medical instrumentation, 2013, 37(2):126-128(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zgylqxzz201302020 [17] RAAB F, BLOOD E, STEINER T, et al.Magnetic position and orientation tracking system[J].IEEE Transactions on Aerospace and Electronic Systems, 1979, 15(5):709-718. http://d.old.wanfangdata.com.cn/Periodical/jfjlgdxxb200406015 [18] PARK F C, MARTIN B J.Robot sensor calibration:Solving AX=XB on the Euclidean group[J].IEEE Transactions on Robotics and Automation, 1994, 10(5):717-721. doi: 10.1109/70.326576 [19] Northern Digital Inc.Aurora user guide[Z].Revision 4.Waterloo: Northern Digital Inc., 2008: 38. -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 807
- HTML全文浏览量: 126
- PDF下载量: 396
- 被引次数: 0
