



Mechanism of butterfly forward flight and prototype verification based on characteristic motion observation
-
摘要:
为了研究蝴蝶扑翼飞行的原理,研制低频扑翼的仿生器,通过蝴蝶飞行运动的生物学观测,提出蝴蝶的3种特征运动状态,分析扑翼运动、胸部俯仰运动及腹部摆动运动之间的相位关系,构建蝴蝶前飞运动学模型。基于“杆-膜”仿生翼的新工艺和定制的机载飞控系统,研制轻量化的仿生蝴蝶扑翼飞行器样机,研究蝴蝶样机的飞行控制策略。通过六维力传感器对样机做地面动力学测试,利用高速摄像机对样机飞行进行运动学跟踪,证明了基于特征运动状态的蝴蝶前飞规律和原理样机研制的有效性。
Abstract:To investigate the mechanism of butterfly flapping wing flight and develop a low-frequency flapping wing bionic robot, the fligh kinematics of the butterfly are capturedand documented using a high-speed camera, three characteristic motion states of butterflies are proposed: flapping wing motion, thorax pitching motion and abdomen swinging motion. Through analysis of the phase relationship among these three states, a kinematics model of the butterfly forward flight is constructed. Then based on the new procedure of the "rod-membrane" bionic wings and a miniature onboard flight control system, a lightweight butterfly-inspired flapping wing air vehicle is developed, the flight control strategy of which is studied as well. Next, a six-dimensional force sensor is used to test the dynamics of the prototype on the ground, and a high-speed camera is used to track the flight of the prototype, which proves the effectiveness of the development of the prototype based on the characteristic motion states of the butterfly forward flight mechanism.
-
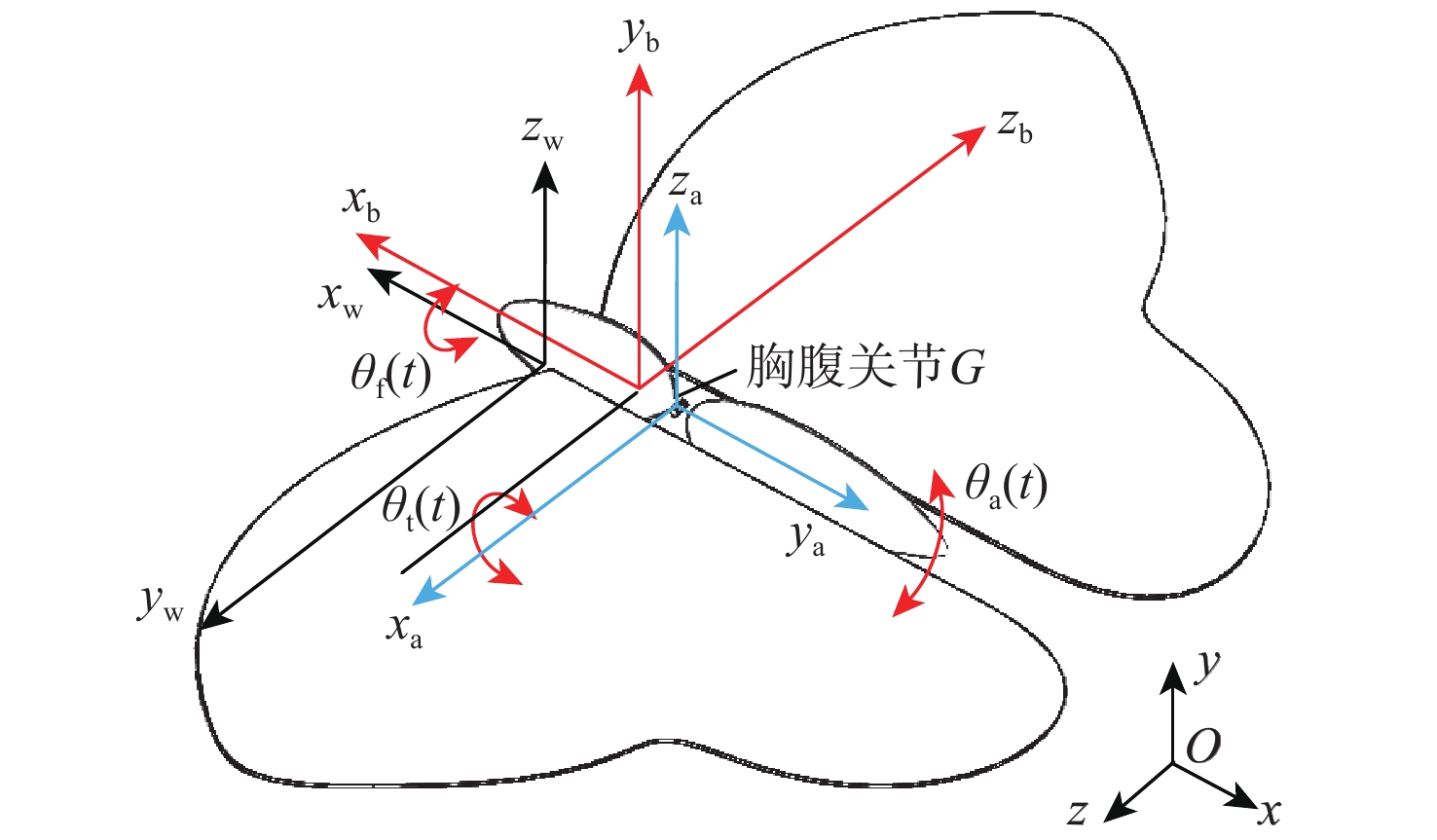
图 1 蝴蝶扑翼模型坐标系统定义
Figure 1. Definition of coordinate system of butterfly flapping wing model

图 3 观测蝴蝶飞行的高速摄像实验系统
Figure 3. A high-speed camera system for observing butterfly flight

图 4 蝴蝶飞行运动中特征点跟踪结果
Figure 4. Tracking results of feature points in butterfly flight movement

图 7 胸部俯仰角及腹部摆动角随时间变化
Figure 7. Time-varying of thorax pitch angle and abdominal swing angle
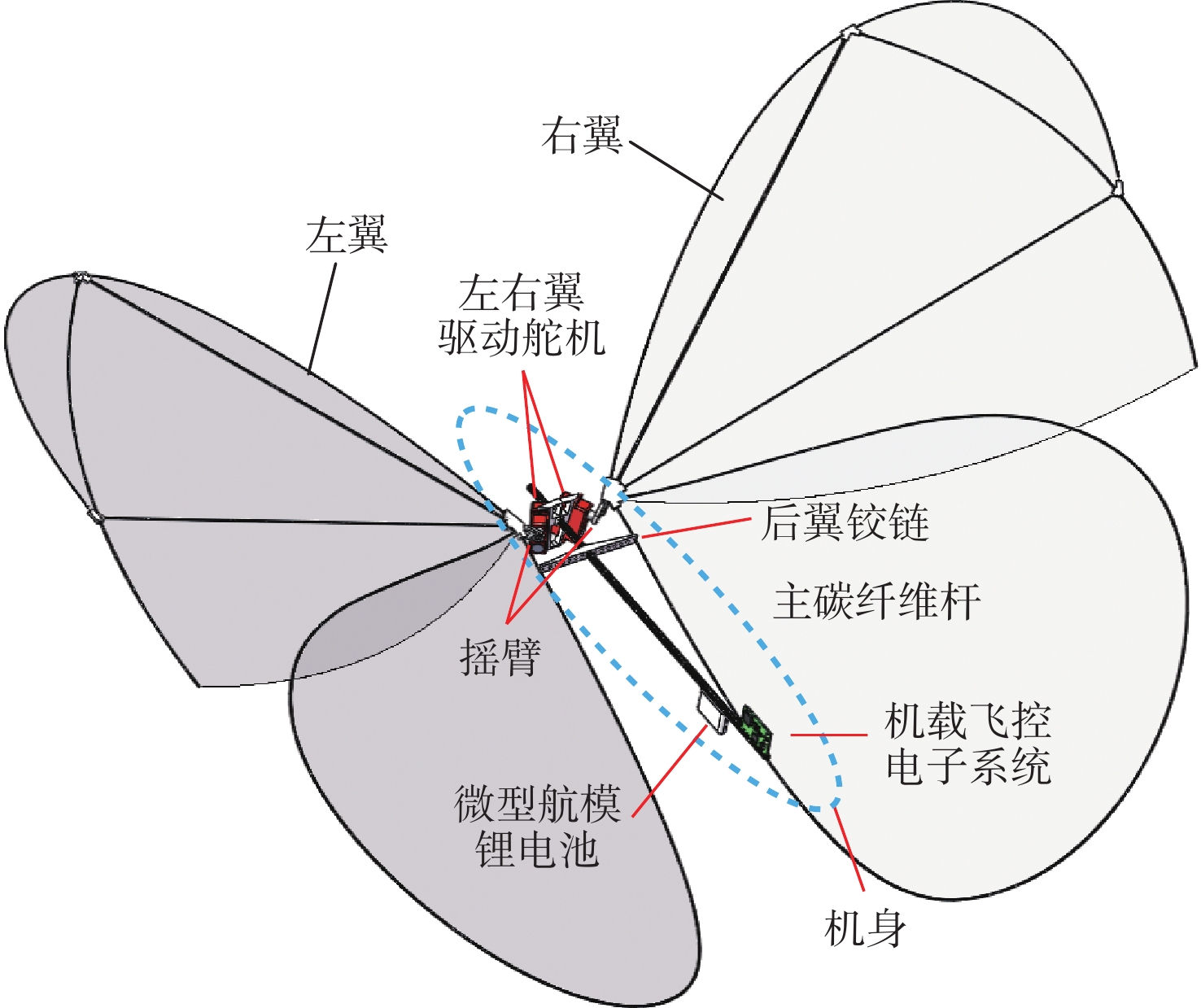
图 8 仿生蝴蝶扑翼飞行器三维机械结构
Figure 8. 3D mechanical structure of butterfly-inspired flapping wing air vehicle
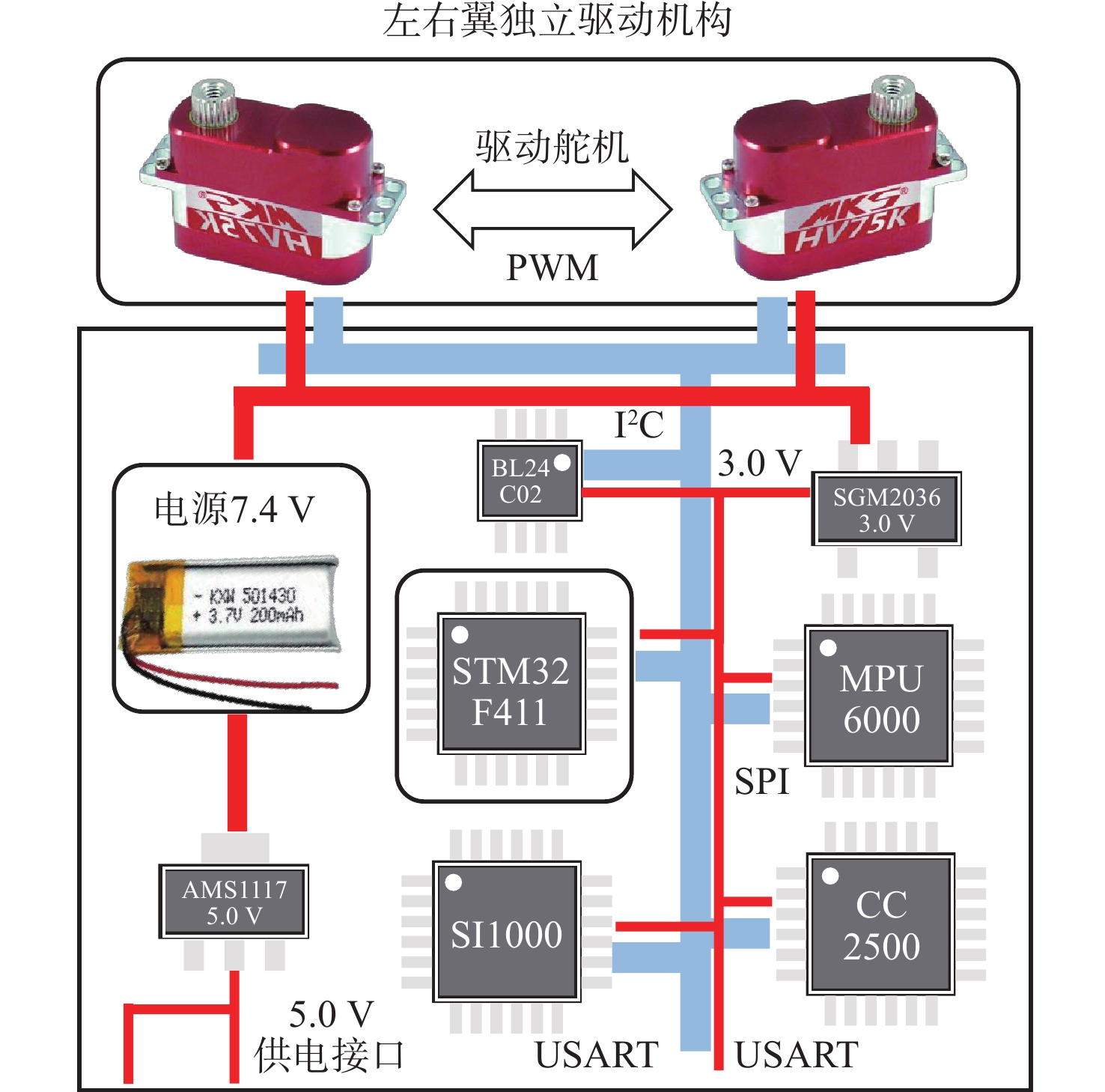
图 10 机载飞控电子系统结构示意图
Figure 10. Schematic diagram of onboard flight control electronic system

图 11 基于姿态反馈的PD控制器框图
Figure 11. Block diagram of PD controller based on attitude feedback

图 12 仿生蝴蝶俯仰及偏航运动控制示意图
Figure 12. Schematic diagram of pitch and yaw motion control of prototype
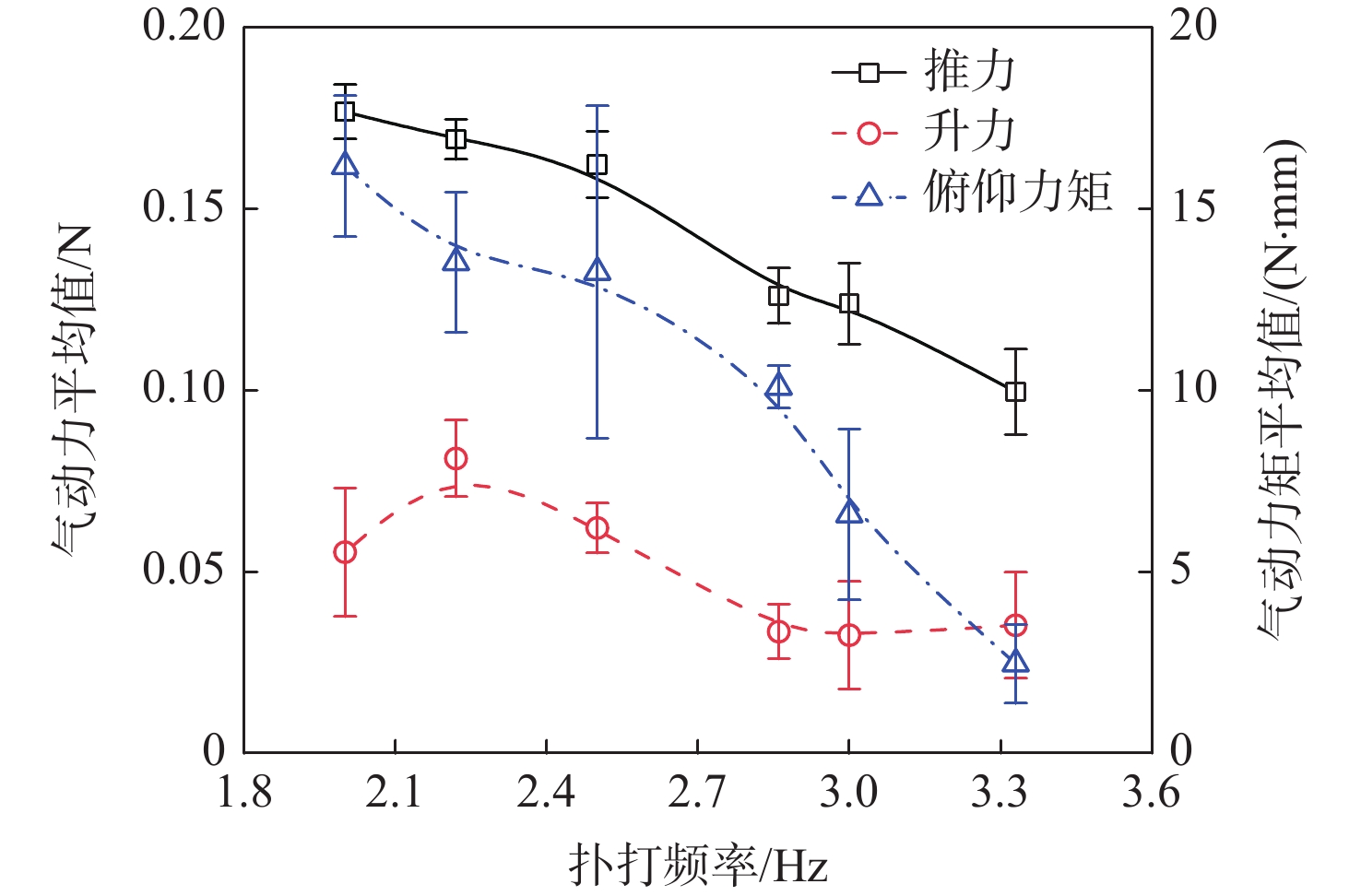
图 15 扑打频率对于扑翼气动性能的影响
Figure 15. Influence of flapping frequency on aerodynamic performance of flapping wings
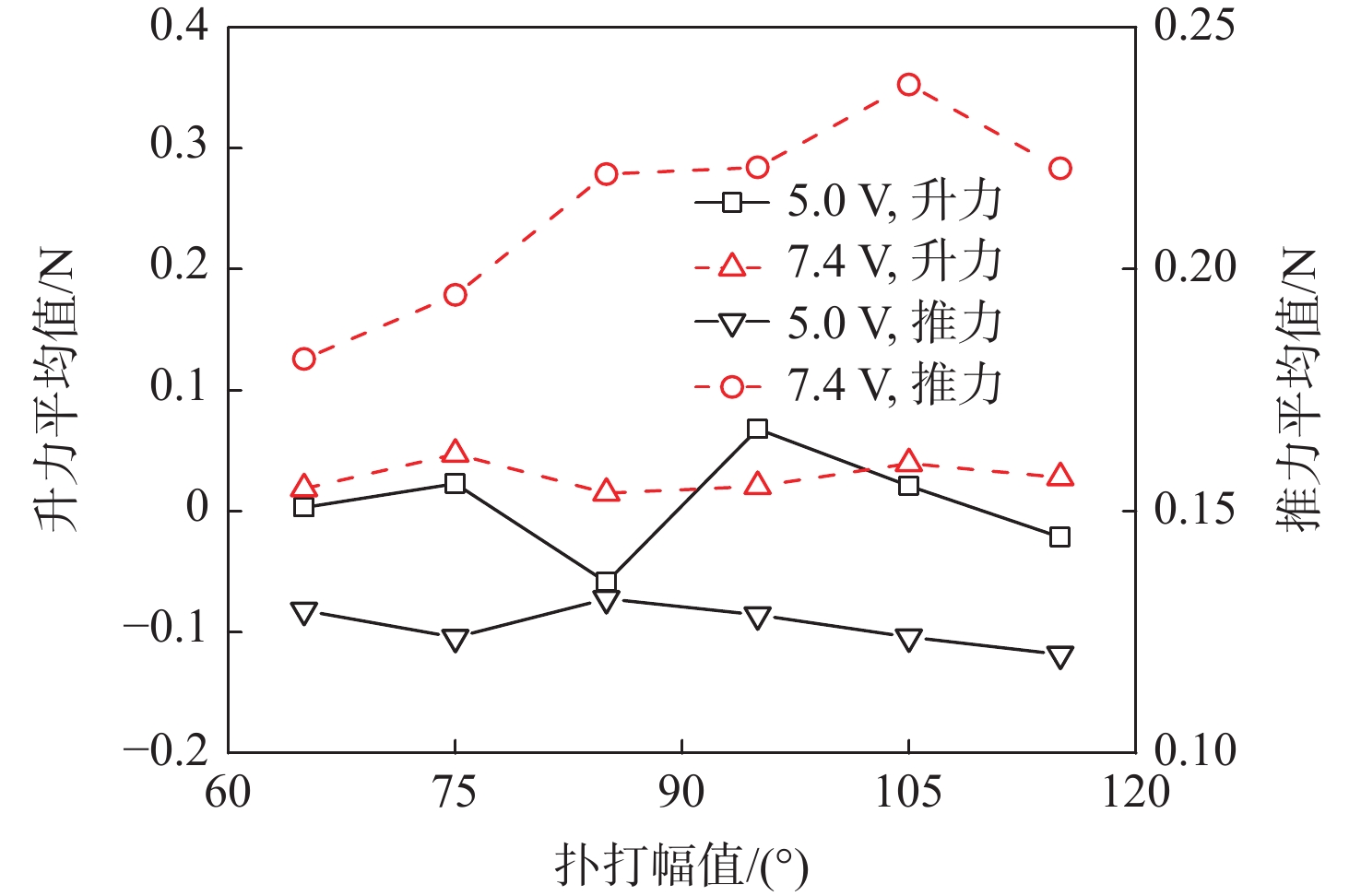
图 16 不同供电电压下样机升推力的测试结果
Figure 16. Test results of lift and thrust of prototype under different supply voltages
表 1 样机物理参数
Table 1. Physical parameters of prototype
参数 数值 翼展/cm 62.0 最大弦长/cm 38.0 扑打频率范围/Hz 1.8~3.2 前翼前掠角/(°) 45 前翼翼面积/cm2 575.7 后翼翼面积/cm2 558.1 最大平飞速度/(m·s−1) 1.5 起飞质量/g 39.60  下载: 导出CSV
下载: 导出CSV
表 2 样机各组件质量分布
Table 2. Mass distribution of each component of prototype
组件 质量/g 占比/% 左右翼驱动舵机 14.80 37.37 左翼 7.55 19.07 右翼 7.51 18.96 主碳纤维杆 0.63 1.59 机载飞控电子系统 2.66 6.72 微型航模电池 5.30 13.38 线材 0.85 2.15 其他 0.30 0.76
下载: 导出CSV
-
[1] 孙茂. 昆虫飞行的空气动力学[J]. 力学进展, 2015, 45(1):201501.SUN M. Aerodynamics of insect flight[J]. Advances in Mechanics, 2015, 45(1): 201501 (in Chinese). [2] DUDLEY R. Biomechanics of flight in neotropical butterflies: Morphometries and kinematics[J]. Journal of Experimental Biology, 1990, 150(1): 37-53. doi: 10.1242/jeb.150.1.37 [3] SRIDHAR M, KANG C K, LANDRUM D B. Beneficial effect of the coupled wing-body dynamics on power consumption in butterflies[C]//AIAA Scitech 2019 Forum. Reston: AIAA, 2019. [4] TWIGG R, SRIDHAR M, POHLY J A, et al. Aeroelastic characterization of real and artificial monarch butterfly wings[C]//AIAA Scitech 2020 Forum. Reston: AIAA, 2020. [5] BETTS C R, WOOTTON R. Wing shape and flight behaviour in butterflies (Lepidoptera: papilionoidea and hesperioidea): A preliminary analysis[J]. The Journal of Experimental Biology, 1988, 138: 271-288. doi: 10.1242/jeb.138.1.271 [6] BRODSKY A K. Vortex formation in the tethered flight of the peacock butterfly Inachis io L. (Lepidoptera, Nymphalidae) and some aspects of insect flight evolution[J]. Journal of Experimental Biology, 1991, 161(1): 77. doi: 10.1242/jeb.161.1.77 [7] DUDLEY R. Biomechanics of flight in neotropical butterflies: Aerodynamics and mechanical power requirements[J]. The Journal of Experimental Biology, 1991, 159: 335-357. doi: 10.1242/jeb.159.1.335 [8] SRYGLEY R B, THOMAS A L R. Unconventional lift-generating mechanisms in free-flying butterflies[J]. Nature, 2002, 420(6916): 660-664. doi: 10.1038/nature01223 [9] HUANG H, SUN M. Forward flight of a model butterfly: Simulation by equations of motion coupled with the Navier-Stokes equations[J]. Acta Mechanica Sinica, 2012, 28(6): 1590-1601. doi: 10.1007/s10409-012-0209-1 [10] IMURA T, FUCHIWAKI M, TANAKA K. Dynamic behaviors of butterfly wing and their application to micro flight robot[C]//Proceedings of ASME 2009 Fluids Engineering Division Summer Meeting. New York: ASME, 2010: 1687-1694. [11] TANAKA H, SHIMOYAMA I. Forward flight of swallowtail butterfly with simple flapping motion[J]. Bioinspiration & Biomimetics, 2010, 5(2): 026003. [12] FUJIKAWA T, SATO Y, MAKATA ,et al. Development of a butterfly-style flapping robot with lead-lag mechanism using f;exible links(mechanical systems)[J]. Nippon Kikai Gakkai Ronbunshu, C Hen/Transactions of the Janpan Society of Mechanical Engineers, Part C, 2010, 76(700):2663-2670. [13] FUJIKAWA T, HIRAKAWA K, OKUMA S, et al. Development of a small flapping robot[J]. Mechanical Systems and Signal Processing, 2008, 22(6): 1304-1315. doi: 10.1016/j.ymssp.2008.01.008 [14] FRONTZEK H, KNUBBEN E, MUGRAUER R, et al. eMotionbutterflies: Ultralight flying objects with collective behavior: FESTO Report 50058[R]. Esslingen: FESTO, 2015. [15] CHI X K, WANG S P, ZHANG Y X, et al. A tailless butterfly-type ornithopter with low aspect ratio wings[C]//CSAA/IET International Conference on Aircraft Utility Systems. London: IET, 2018: 1-6. [16] PHAN H V, AURECIANUS S, KANG T, et al. KUBeetle-S: An insect-like, tailless, hover-capable robot that can fly with a low-torque control mechanism[J]. International Journal of Micro Air Vehicles, 2019, 11: 1756829319861371. [17] NGUYEN Q V, CHAN W L. Development and flight performance of a biologically-inspired tailless flapping-wing micro air vehicle with wing stroke plane modulation[J]. Bioinspiration & Biomimetics, 2018, 14(1): 016015. -

 下载:
下载:







 点击查看大图
点击查看大图
计量
- 文章访问数: 2418
- HTML全文浏览量: 490
- PDF下载量: 431
- 被引次数: 0
