



-
摘要:
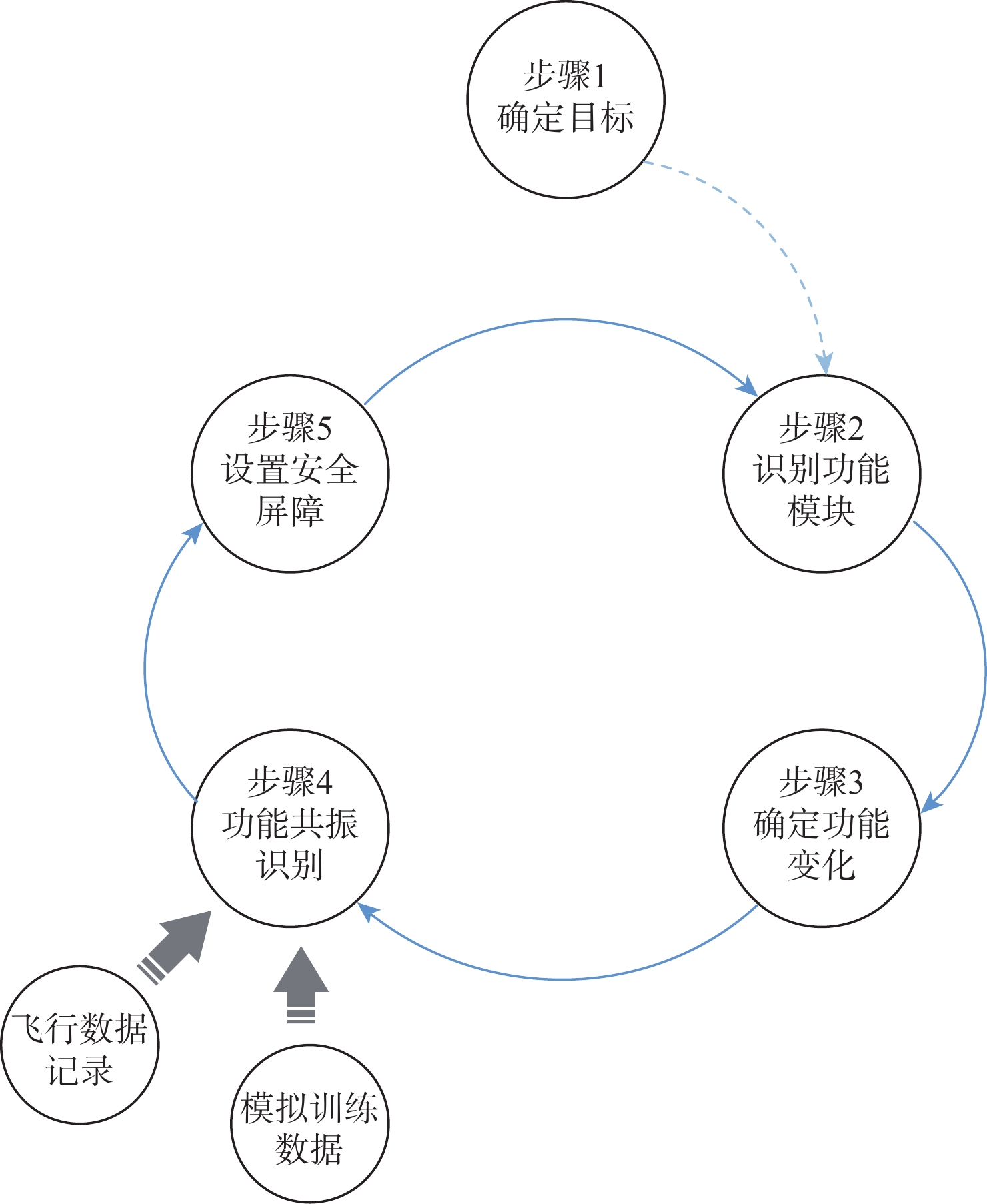
飞机着陆阶段是飞行安全事故发生频率最高的阶段,也是对飞行员技术要求最高的阶段。应当构建科学的评判体系,对其着陆操控技术水平进行准确的评价,识别其技术缺陷,制定措施提升着陆阶段的安全品质。基于功能共振事故模型(FRAM),对飞机着陆下滑和滑跑减速2个阶段分别构建功能网络模型。构建航空器着陆滑跑减速模型,以虚拟试飞的方式模拟飞行员的着陆操作过程,并对不同道面环境下的着陆控制过程实施数据采样。通过采样数据与安全包络的对比,识别功能网络中的功能共振关系与发生功能异变的功能模块。为能够持续优化飞行员着陆操控安全品质,对FRAM分析流程做出改进,建立滚动优化的数据采集与安全屏障有效性验证程序,及时剔除无效的管控措施。改进FRAM分析方法弱化了传统分析方法对分析者知识结构的依赖,分析结果更为客观科学,可为飞行学员的培养和飞行员的能力持续提升提供有效技术支撑。
Abstract:The aircraft landing stage poses the highest risk of flight accidents and demands the most rigorous technical skills from pilots. Thus, a scientific assessment system should be established to accurately evaluate pilots’ technical skills of landing control, identify their technical defects, and formulate measures to improve the safety quality in the landing stage. Based on the functional resonance accident model (FRAM), functional network models of aircraft landing glide and taxiing deceleration are constructed. An aircraft landing taxiing deceleration model is also developed. The pilot’s landing operation is simulated by virtual flight tests, and the data of the landing control with different pavements is sampled. By comparing the sampled data with the safety envelope, the functional resonance relationship and the functional changes in the network are identified. To continuously optimize the safety quality of the landing control, the FRAM analysis process is improved, a rolling optimized program of data acquisition and safety barrier effectiveness verification is built, and invalid control measures are eliminated in time. The improved FRAM analysis method weakens the dependence of traditional analytical methods on the knowledge structure of analysts. Furthermore, the analysis results are more objective, which can provide effective technical support for the training of flight cadets and the continuous improvement of pilots’ ability.
-
Key words:
- safety quality /
- landing run /
- functional resonance accident model /
- human factor /
- safety envelope
-
表 1 航空器着陆阶段功能模块
Table 1. Function modules of aircraft landing stage
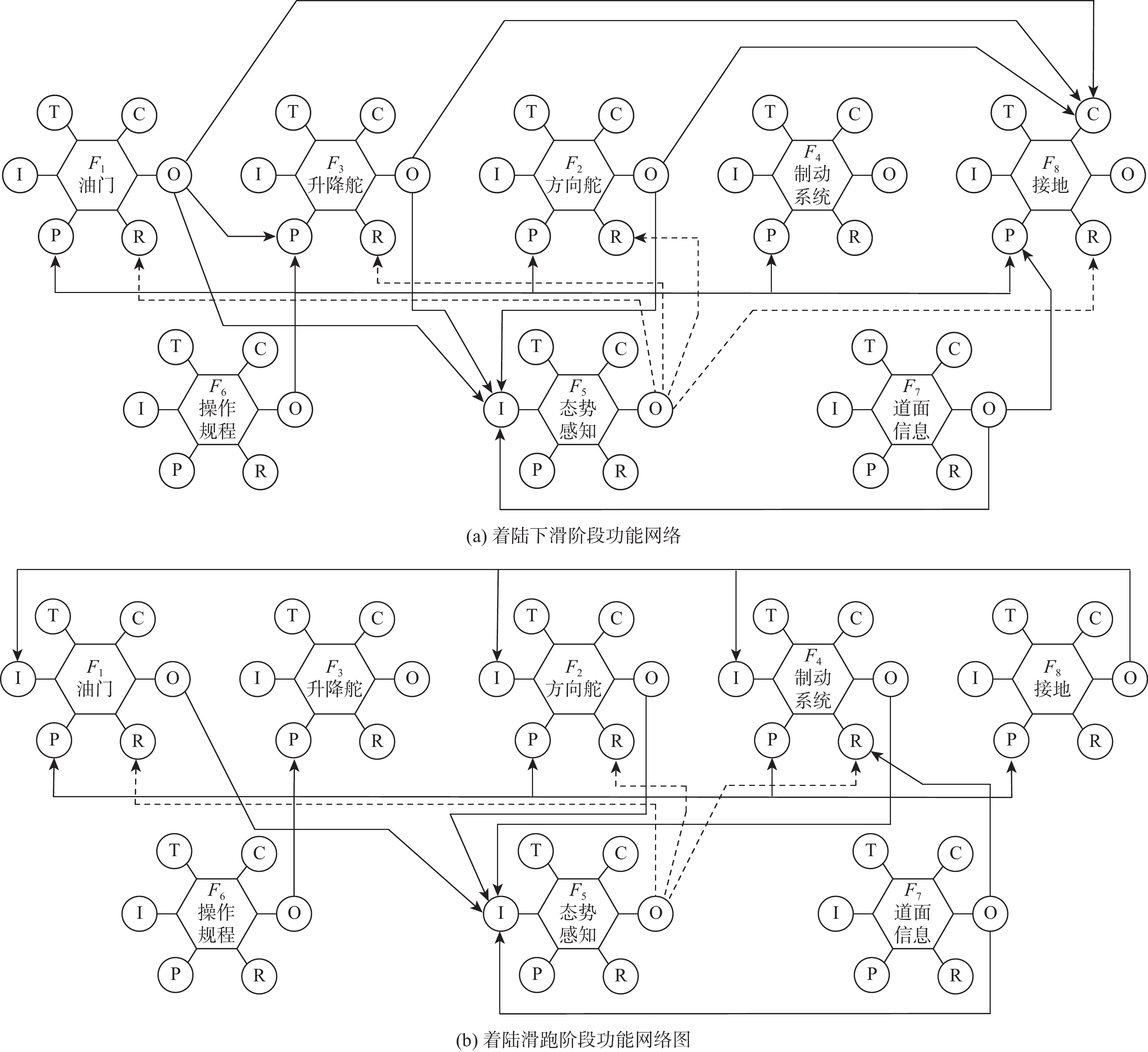
模块 名称 类别 F1 油门 M F2 方向舵 M F3 升降舵 M F4 制动系统 M F5 态势感知 M F6 操作规程 G F7 道面信息 M,S F8 接地 M  下载: 导出CSV
下载: 导出CSV
表 2 方向舵的功能结构
Table 2. Function structure of rudder
功能单位 描述 输入(I) 侧偏距,航向偏角,操作规程 输出(O) 转弯率与航向 资源(R) 导航台的导引,道面标识信息 时间(T) 着陆阶段全程 控制(C) 飞行员踩脚舵 前提(P) 存在偏角和侧偏距并被感知
下载: 导出CSV
表 3 制动系统的功能结构
Table 3. Function structure of brake system
功能单位 描述 输入(I) 滑行速度 输出(O) 加速度 资源(R) 刹车,减速板 时间(T) 接地至滑跑结束 控制(C) 握刹车杆,打开减速板阀门 前提(P) 速度大于标准程序设定
下载: 导出CSV
表 4 接地的功能结构
Table 4. Function structure of landing touch
功能单位 描述 输入(I) 下降率,水平速度,航向 输出(O) 横向和纵向偏距,接地速度 资源(R) 道面标识信息 时间(T) 开始下滑至主轮接地 控制(C) 方向舵,油门,仰角 前提(P) 航行诸元符合标准,道面阻力良好,
无风切变影响
下载: 导出CSV
表 5 油门的功能变化
Table 5. Functional variability of throttle
接地速度偏离值/(m·s-1) 功能变化情况 安全品质 |ΔV|≤5 油门控制范围良好 良好 15≥ΔV>5 油门过大,但在边界内 合格 −5>ΔV≥−15 油门过小,但在边界内 合格 |ΔV|>15 油门控制范围超出安全边界 不合格
下载: 导出CSV
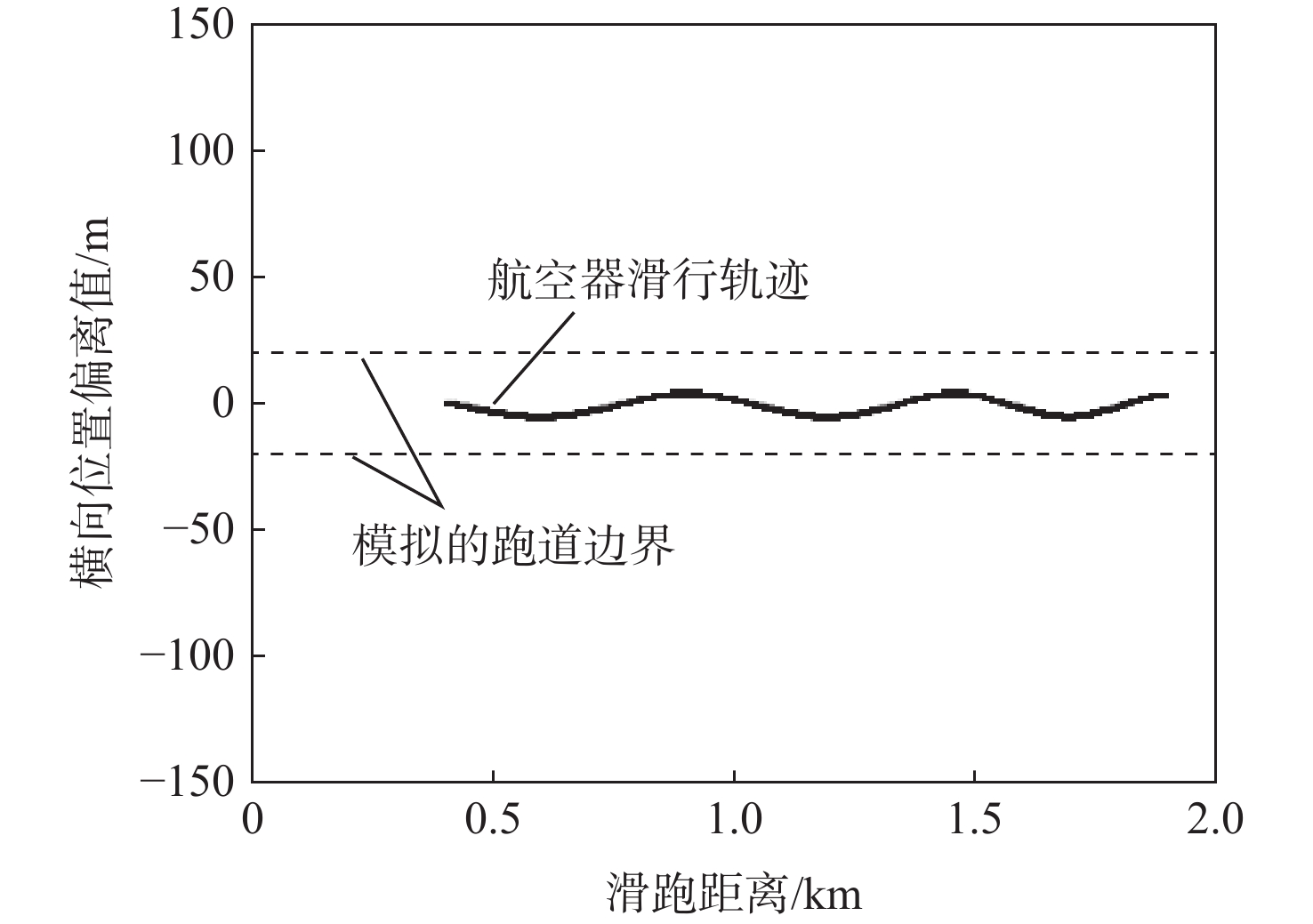
表 6 方向舵的航迹偏移功能变化
Table 6. Track offset functional variability of rudder
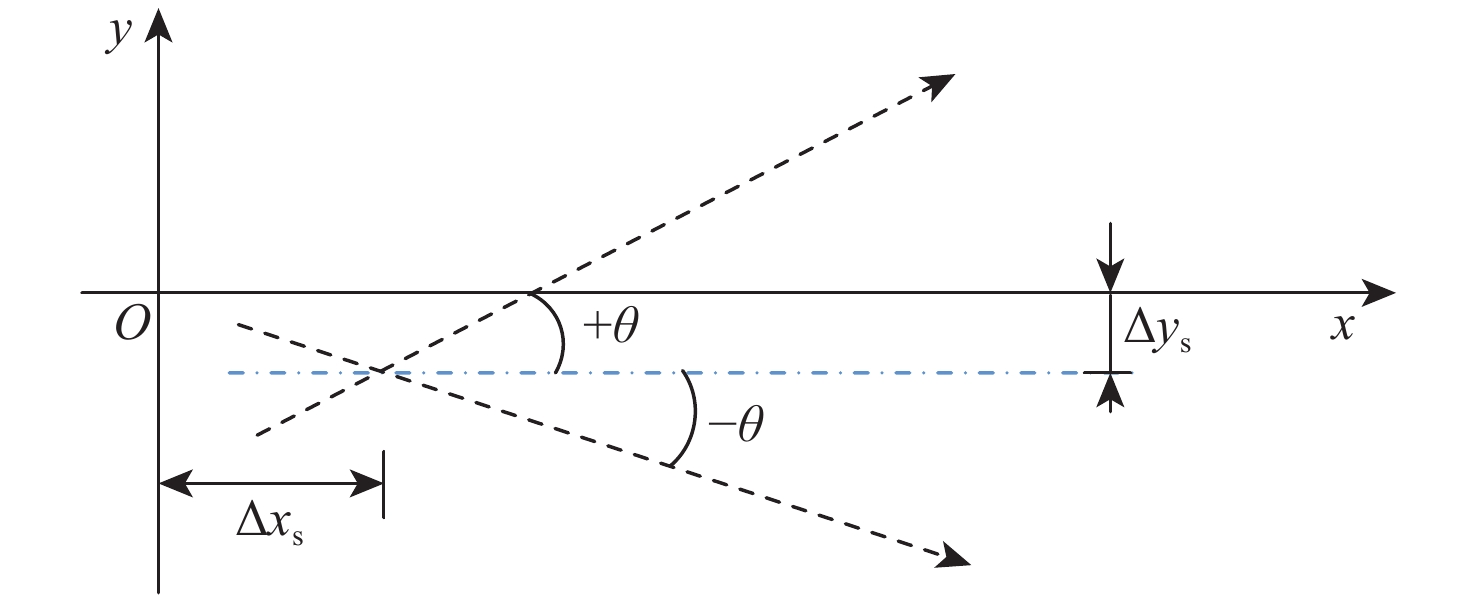
横向位置偏离值/m 功能变化情况 安全品质 |Δy|≤5 滑行轨迹控制良好 良好 10≥|Δy|>5 滑行轨迹有偏移,但在边界内 合格 |Δy|>10 滑行偏移显著,风险较高 不合格
下载: 导出CSV
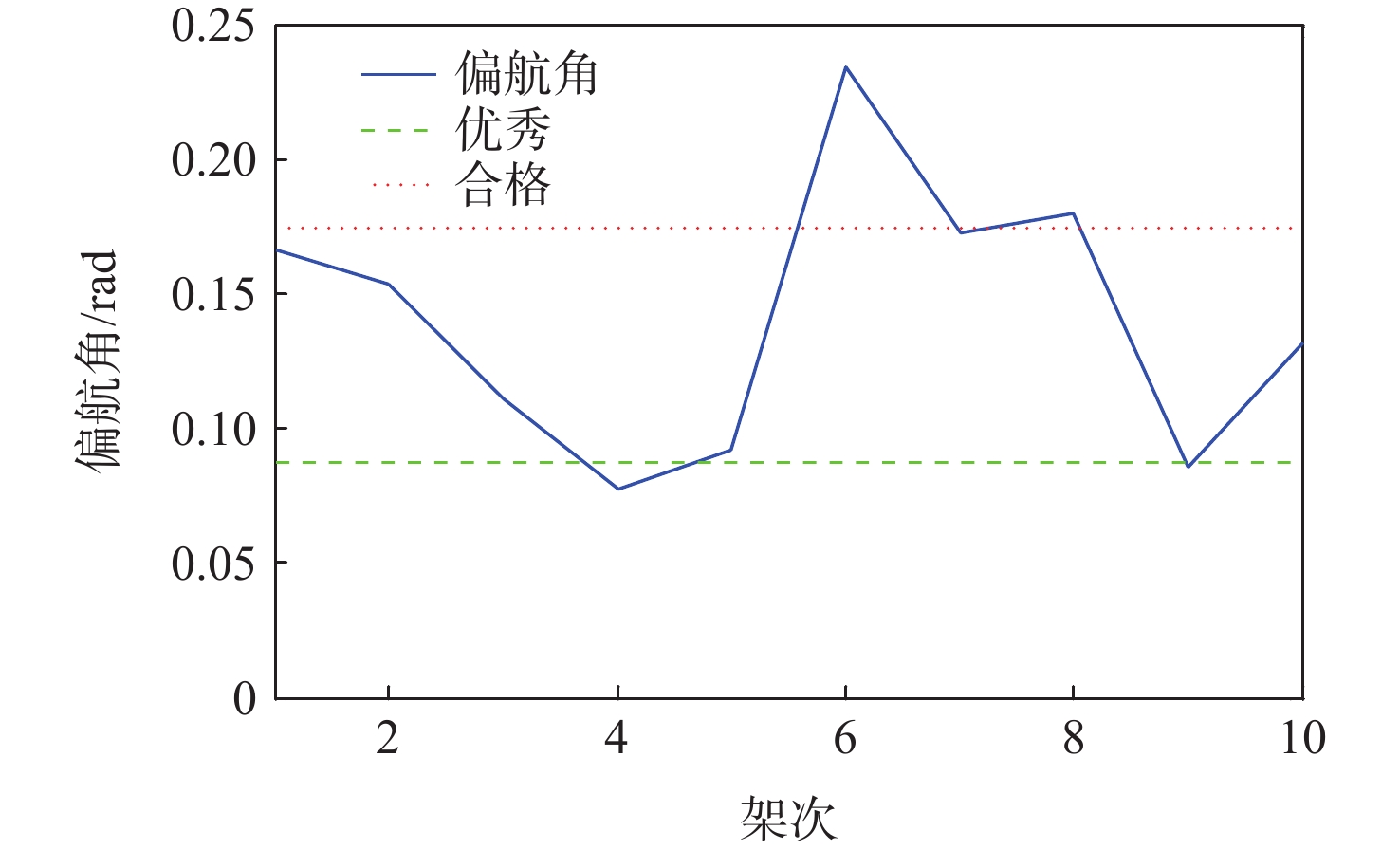
表 7 方向舵的航向偏移功能变化
Table 7. Heading offset functional variability of rudder
接地点偏航角/rad 功能变化情况 安全品质 |θtd|≤5π/180 航向控制范围良好 良好 15π/180≥|θtd|>5π/180 航向有偏移,但在边界内 合格 |θtd|>15π/180 航向偏移显著,风险较高 不合格
下载: 导出CSV
表 8 升降舵的功能变化
Table 8. Functional variability of elevator
接地点纵向位置偏离/m 功能变化情况 安全品质 |Δxtd|≤50 下降率控制范围良好 良好 150≥Δxtd>50 下降率略小,但在边界内 合格 −50>Δxtd≥−150 下降率略大,但在边界内 合格 |Δxtd|>150 下滑曲线偏移显著,风险较高 不合格
下载: 导出CSV
表 9 着陆滑跑模型参数设置
Table 9. Landing model parameter setting
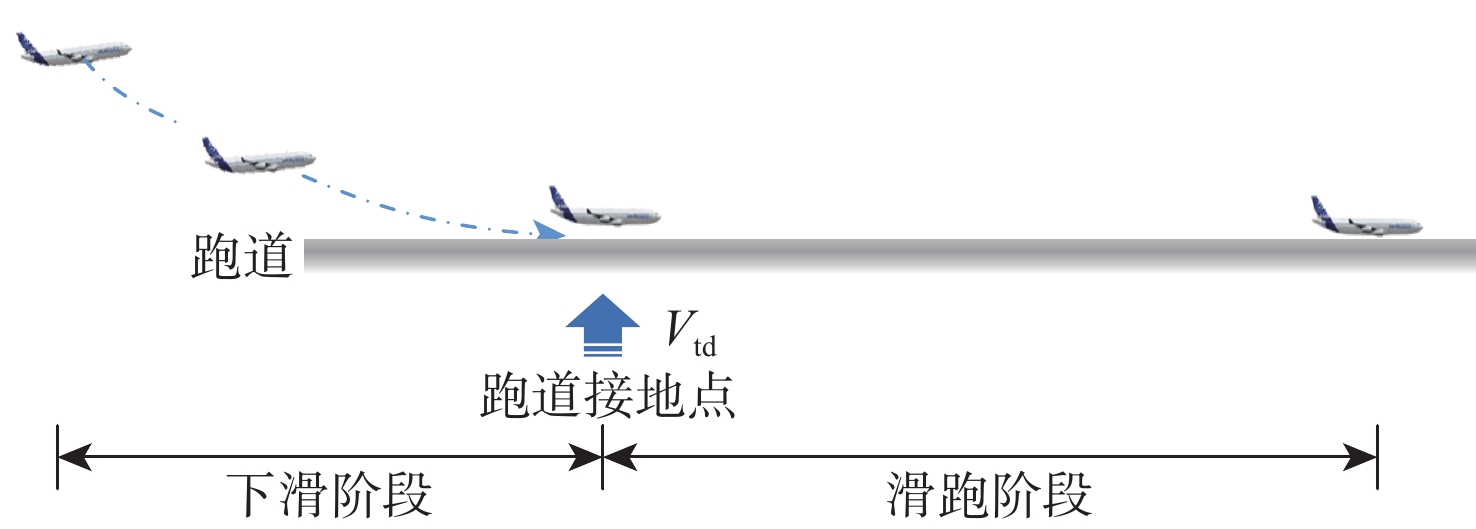
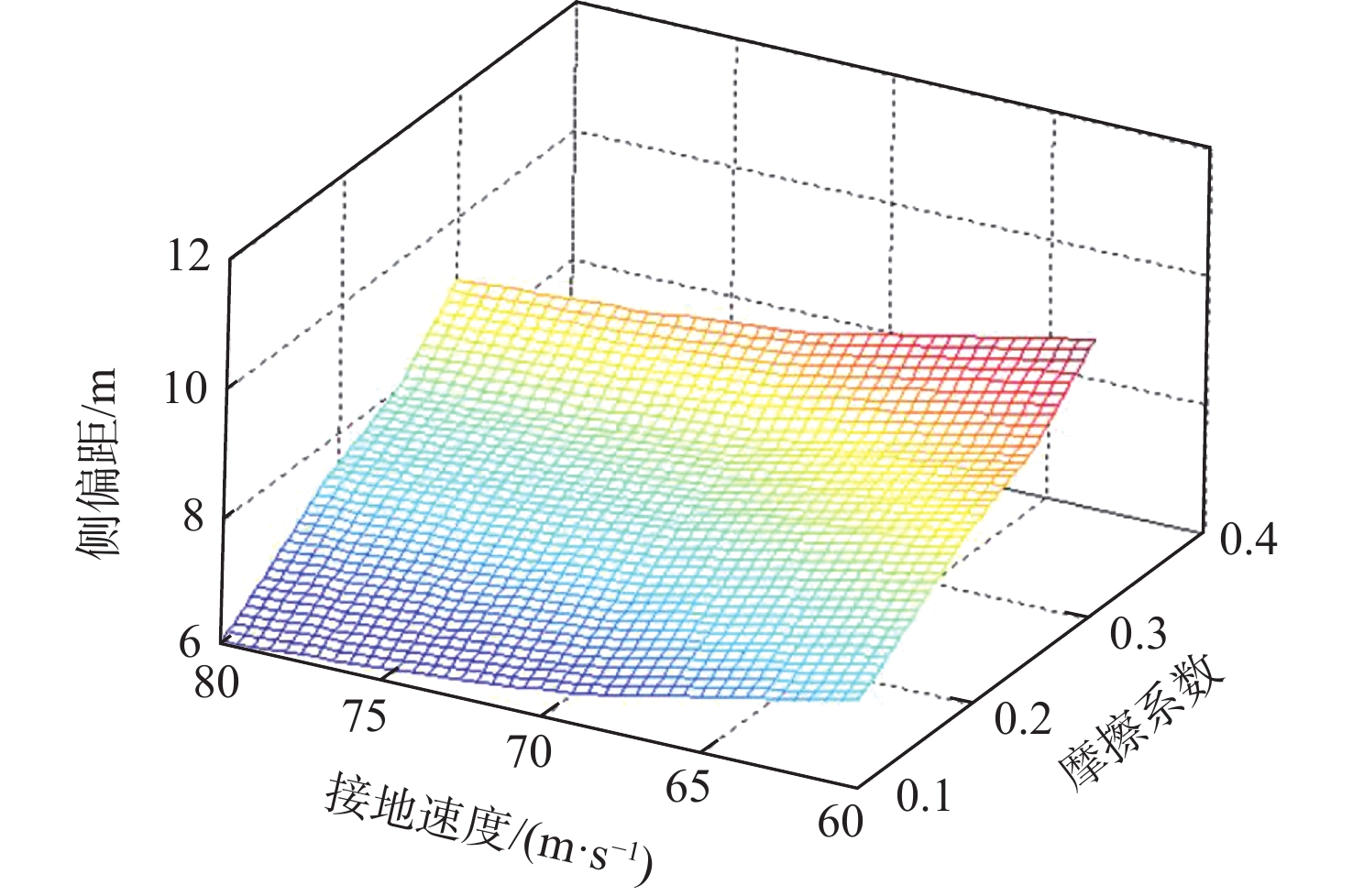
参数 数值 接地点横向偏移量Δytd/m N(0,5) 接地点纵向偏移量Δxtd/m N(0,20) 接地点偏航角θtd/rad N(0,5π/180) 平均滑动摩擦系数f N(µ,0.005) 接地速度Vtd/(m·s−1) N(70.475,5) 最大转弯率|ωmax|/(rad·s−1) 5π/180 速度修正系数K1 0.95 机翼面积S/m2 60 飞机着陆重量W/N 180000 空气密度ρ/(kg·m−3) 1.225 接地升力系数Cl,td 0.89 接地阻力系数CD,td 0.12 跑道接地点/m (400,0) 跑道宽度/m 40
下载: 导出CSV
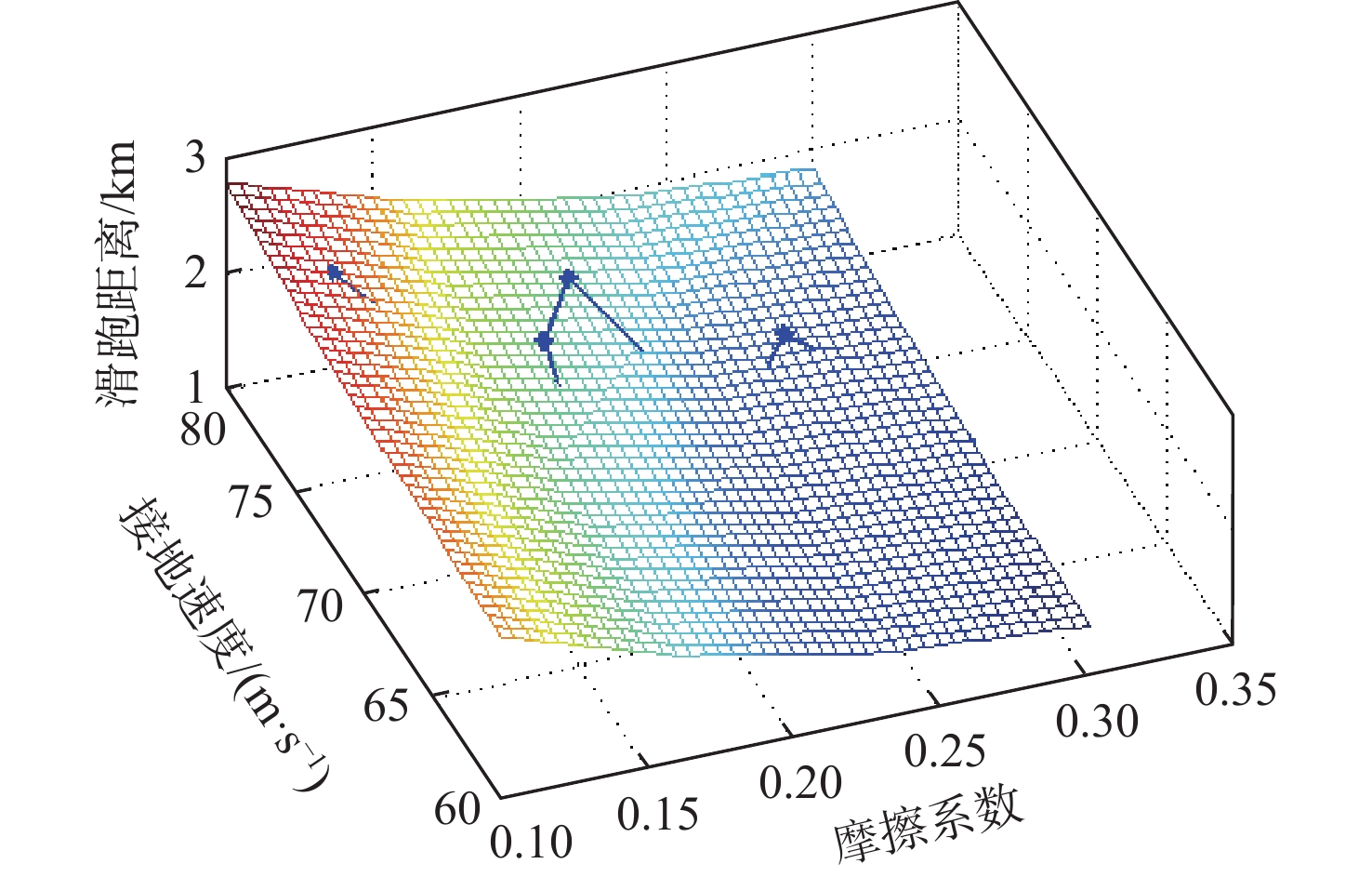
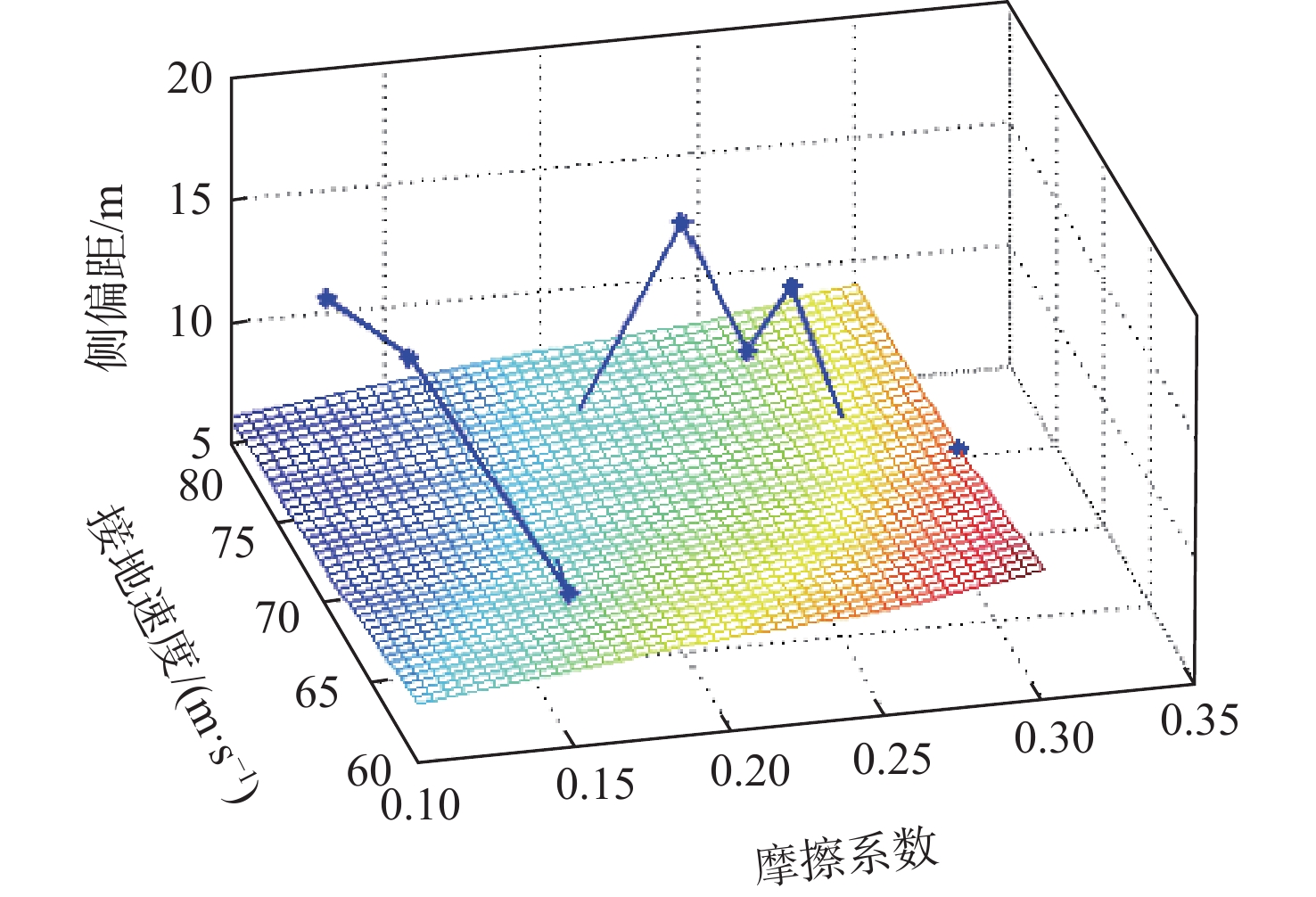
表 10 飞机着陆滑跑模拟数据
Table 10. Simulation data of aircraft landing taxiing
序号 摩擦系数 最大偏航角
/rad最大侧偏距
/m滑跑距离
/m接地速度
/(m⋅s−1)接地点
/m接地偏航角
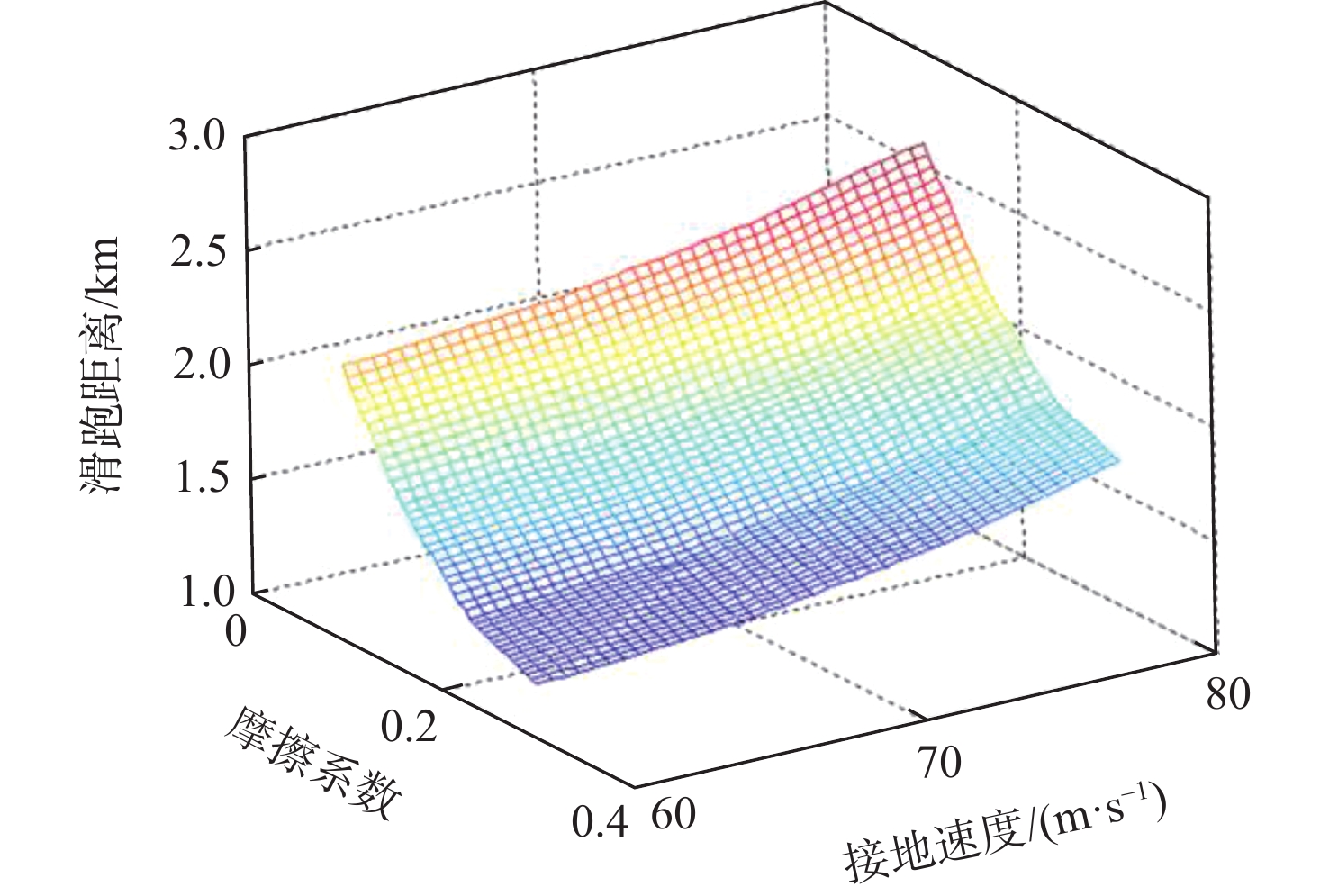
/rad1 0.12 0.166 6 13.022 2 545 76.421 (398.1,1.6) 0.103 9 2 0.14 0.153 6 11.861 2 260 74.104 (370.6,10.9) −0.016 3 3 0.16 0.111 1 8.667 1 701 63.794 (435.7,8.1) 0.025 7 4 0.18 0.077 3 5.653 2 078 73.925 (440.8,3.6) −0.034 9 5 0.20 0.091 8 7.102 2 066 76.429 (339.9,−0.1) 0.058 3 6 0.22 0.234 5 17.941 1 738 71.726 (347.2,7.1) −0.141 1 7 0.24 0.172 6 12.492 1 661 71.572 (353.9,−10.9) 0.046 1 8 0.26 0.180 1 13.663 1 768 73.541 (425.4,8.5) −0.088 2 9 0.28 0.086 1 6.441 1 590 72.377 (349.5,−0.1) −0.056 2 10 0.30 0.131 7 9.506 1 473 68.886 (454.8,−9.4) 0.001 1
下载: 导出CSV
表 11 功能共振原因分析
Table 11. Causal analysis of functional resonance
共振关系 原因描述 F2~F5 情景意识不够敏锐,对航向与侧偏距的感知不够准确;对飞机舵面与转弯率的控制关系掌握不够熟练,不能很好地修正存在的偏差 F1~F3 下滑过程中对油门与升降舵的协同控制掌握不够熟练,下降率没控制好 F4~F5 对速度的情景意识不够准确,没有意识到减速过慢的现象,制动力施加不够。对道面摩擦阻力的影响也没有充分遇见 F1~F2 下滑过程中对油门与方向舵的协同控制不够熟练,接地点产生偏移 F2~F4~F5 滑跑过程中对方向舵与制动系统的协同控制不够熟练
下载: 导出CSV
表 12 方向舵的安全屏障
Table 12. Rudder safety barrier
屏障类型 屏障措施描述 物理屏障 加强机组间的协同,对显著的控制偏差,其他机组成员应当及时提醒 功能屏障 加强人员技术水平的精细化管理,做好任务机组人员的选派,注重能力互补,新老搭配 象征屏障 改进着陆航向引导系统,通过信息告警咨询或语音提示的方法辅助飞行员修正航向偏离 无形屏障 通过模拟训练与教官带教的方式,对方向舵的操控进行强化训练,提高操控熟练度
下载: 导出CSV
表 13 态势感知的安全屏障
Table 13. Situational awareness safety barrier
屏障类型 屏障措施描述 功能屏障 着陆阶段避免不必要的交流和操作程序,降低机组人员的精力损耗 象征屏障 优化仪表信息显示界面,提升机组人员对态势的认知效率 无形屏障 加强注意力分配方面的专项训练,提高情景感知能力
下载: 导出CSV
表 14 模型性能对比分析
Table 14. Comparative analysis of model performance
不同点 传统的FRAM方法 改进FRAM方法 分析流程 开环单次分析流程 闭环反馈回路流程,滚动分析 分析阶段 开展事故后分析 贯穿系统运行全程 专家知识依赖度 高度依赖专家知识和经验 提高了客观数据的影响权重,对专家知识依赖适中 信息数据利用程度 仅使用与本次事故相关数据,数据利用率低 充分关联大量历史数据,信息利用率高 分析效率 每次事故后均需重新开展建模分析 模型构建后始终有效,仅需定期开展模型修正 安全屏障有效性 可能存在无效的安全屏障措施 能及时验证安全屏障有效性,优化防范措施
下载: 导出CSV
-
[1] 崔振新, 陆正, 汪磊. 基于灰色关联的飞机着陆冲出跑道事故影响因素研究[J]. 安全与环境工程, 2015, 22(3): 99-104. doi: 10.13578/j.cnki.issn.1671-1556.2015.03.019CUI Z X, LU Z, WANG L. Evaluation of the influence factors of landing overrun accidents based on the grey relation theory[J]. Safety and Environmental Engineering, 2015, 22(3): 99-104(in Chinese). doi: 10.13578/j.cnki.issn.1671-1556.2015.03.019 [2] 武朋玮, 李颖晖, 郑无计, 等. 基于可达集方法的结冰飞机着陆阶段安全风险评估[J]. 航空学报, 2018, 39(12): 122139.WU P W, LI Y H, ZHENG W J, et al. Flight risk evaluation based on reachable set method at the phase of icing aircraft landing[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(12): 122139(in Chinese). [3] SHAPPELL S, DETWILER C, HOLCOMB K, et al. Human error and commercial aviation accidents: An analysis using the human factors analysis and classification system[J]. Human Factors, 2007, 49(2): 227-242. doi: 10.1518/001872007X312469 [4] PURBA J H, SONY TJAHYANI D T, WIDODO S, et al. Fuzzy probability based event tree analysis for calculating core damage frequency in nuclear power plant probabilistic safety assessment[J]. Progress in Nuclear Energy, 2020, 125: 103376. doi: 10.1016/j.pnucene.2020.103376 [5] JONG J C, LAI Y C R, YOUNG C C, et al. Application of fault tree analysis and Swiss cheese model to the overspeed derailment of puyuma train in Yilan[J]. Transportation Research Record:Journal of the Transportation Research Board, 2020, 2674(5): 33-46. doi: 10.1177/0361198120914887 [6] FAN C H, ZHU Y, LI W, et al. Consensus building in linguistic failure mode and effect analysis: A perspective based on prospect theory[J]. Quality and Reliability Engineering International, 2020, 36(7): 2521-2546. doi: 10.1002/qre.2714 [7] HOLLNAGEL E. Cognitive reliability and error analysis method: Cream[M]. 1st ed. Oxford: Elsevier, 1998 [8] FORESTER J, BLEY D, COOPER S, et al. Expert elicitation approach for performing ATHEANA quantification[J]. Reliability Engineering & System Safety, 2004, 83(2): 207-220. [9] RUIZ-SÁNCHEZ T, NELSON P F. Application of the ATHEANA methodology for the HRA of a PSA scenario for a BWR nuclear power plant[C]//10th International Conference on Probabilistic Safety Assessment and Management. London: Springer, 2010: 1520-1530. [10] LEVESON N. A new approach to hazard analysis for complex systems [C]//Proceedings of International Conference of the System Safety Society. St. Paul: ISSS, 2003: 498–507. [11] HOLLNAGEL E. Barriers and accident prevention[M]. Aldershot: Ashgate Pub Co., 2004. [12] WOLTJER R, SMITH K, HOLLNAGEL E. Functional modeling and constraint management in command and control: Two microworld studies[J]. IFAC Proceedings Volumes, 2007, 40(16): 456-461. doi: 10.3182/20070904-3-KR-2922.00081 [13] 李耀华, 巩子瑜. 基于改进FRAM的民机系统安全性分析[J]. 航空学报, 2020, 41(12): 324083.LI Y H, GONG Z Y. Safety analysis of civil aircraft system based on improved FRAM[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(12): 324083(in Chinese). [14] 陈芳, 陈茜. 基于FRAM的进近管制安全分析[J]. 安全与环境学报, 2020, 20(5): 1788-1794. doi: 10.13637/j.issn.1009-6094.2019.1165CHEN F, CHEN X. System safety analysis for the approach control based on the FRAM method[J]. Journal of Safety and Environment, 2020, 20(5): 1788-1794(in Chinese). doi: 10.13637/j.issn.1009-6094.2019.1165 [15] 方振平, 陈万春, 张曙光. 航空飞行器飞行动力学[M]. 北京: 北京航空航天大学出版社, 2005: 260-262.FANG Z P, CHEN W C, ZHANG S G. Flight dynamics of aircraft[M]. Beijing: Beihang University of Press, 2005: 260-262 (in Chinese). [16] 鲁素芬, 张磊. 污染跑道上的起飞着陆性能计算研究[J]. 民用飞机设计与研究, 2012(4): 15-18. doi: 10.19416/j.cnki.1674-9804.2012.04.005LU S F, ZHANG L. Study of takeoff and landing performance calculation on contaminated runway[J]. Civil Aircarft Design & Research, 2012(4): 15-18(in Chinese). doi: 10.19416/j.cnki.1674-9804.2012.04.005 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 873
- HTML全文浏览量: 103
- PDF下载量: 44
- 被引次数: 0
