



-
摘要:
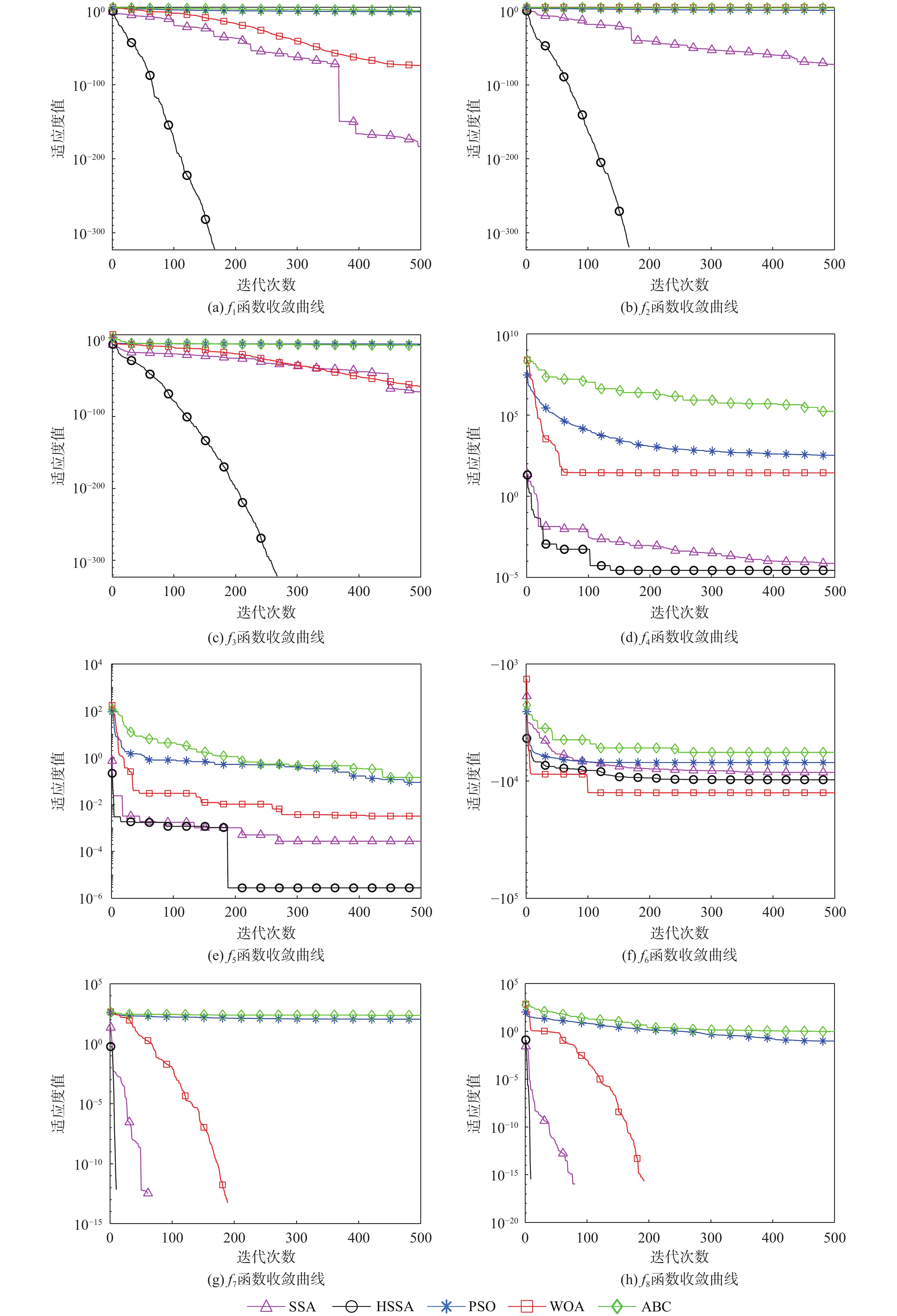
针对麻雀搜索算法(SSA)搜索精度不高、全局搜索能力不强、收敛速度慢和易于陷入局部最优等问题,提出了一种基于混合策略的麻雀搜索算法(HSSA)。采用改进的Circle混沌映射初始化种群,提高种群多样性;结合樽海鞘群算法改进发现者的搜索公式,提高算法迭代前期的全局搜索能力和范围;在加入者的搜索公式中引入自适应步长因子,提高算法的局部搜索能力和收敛速度;通过镜像选择机制,提升每次迭代后的个体质量,提高算法的寻优精度和寻优速度;在位置更新处加入模拟退火机制,帮助算法跳出局部最优。利用8种测试函数进行测试,结果表明,改进算法比SSA有更好的寻优性能。将改进前后算法与极限学习机结合进行实验,人体表面肌电信号数据集的分类预测精度从80.17%提高到90.87%,证实了改进算法的可行性和良好性能。
Abstract:Aiming at solving the problems in the original sparrow search algorithm (SSA), such as low search accuracy, weak global search ability, slow convergence speed and easy tendency to fall into local optimum, a hybrid strategy-based sparrow search algorithm (HSSA) is proposed. First, an improved Circle chaotic map was used to initialize the population and increase the diversity of the population. Then, the salp swarm algorithm was integrated into the search formula of the discoverers to enhance its global search ability and scope in the early stage of iteration, and an adaptive step size factor was introduced into the search formula of the participants to improve the local search ability and convergence speed of the algorithm. Next, the mirror selection mechanism was applied to boost the individual quality after each iteration, thereby improving the search accuracy and speed of the algorithm. Finally, a simulated annealing mechanism was added to the location update, thus enabling the algorithm effectively to jump out of local optimum. The test results of eight functions show that the HSSA has better optimization performance than SSA. By combining the improved algorithm and the extreme learning machine, the classification and prediction accuracy of human surface electromyogram signal data increased from 80.17% to 90.87%, which proves the feasibility and good performance of the improved algorithm.
-
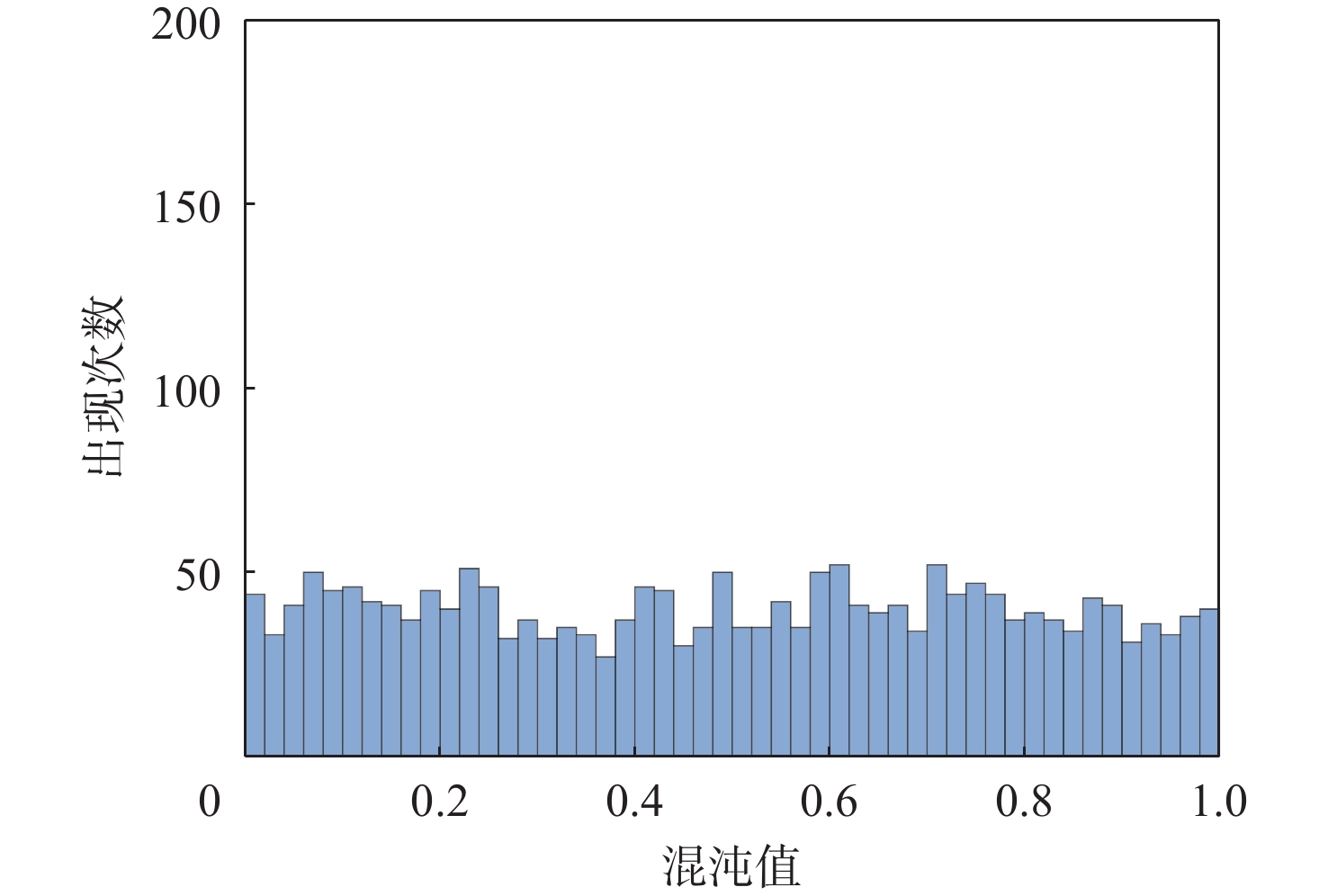
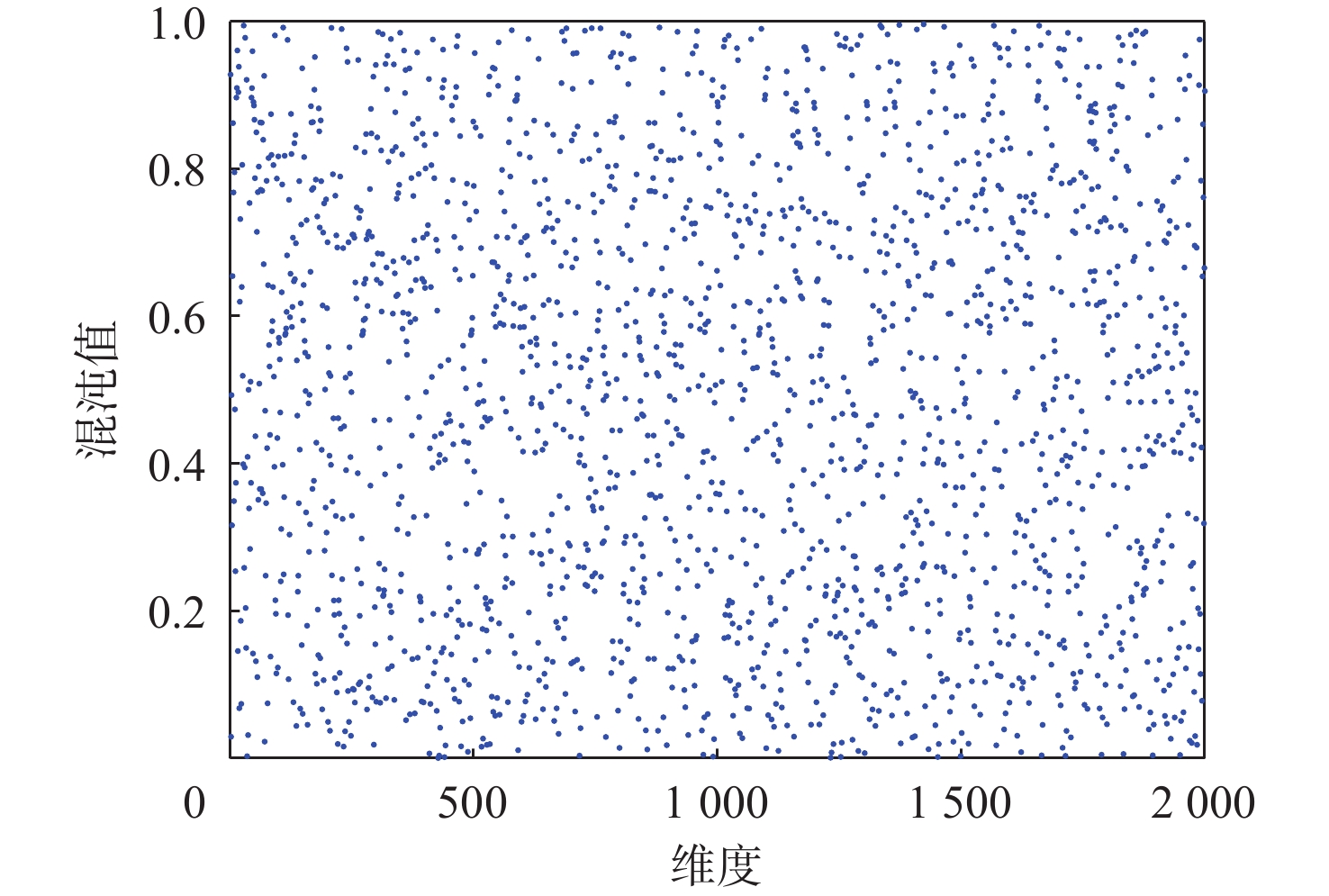
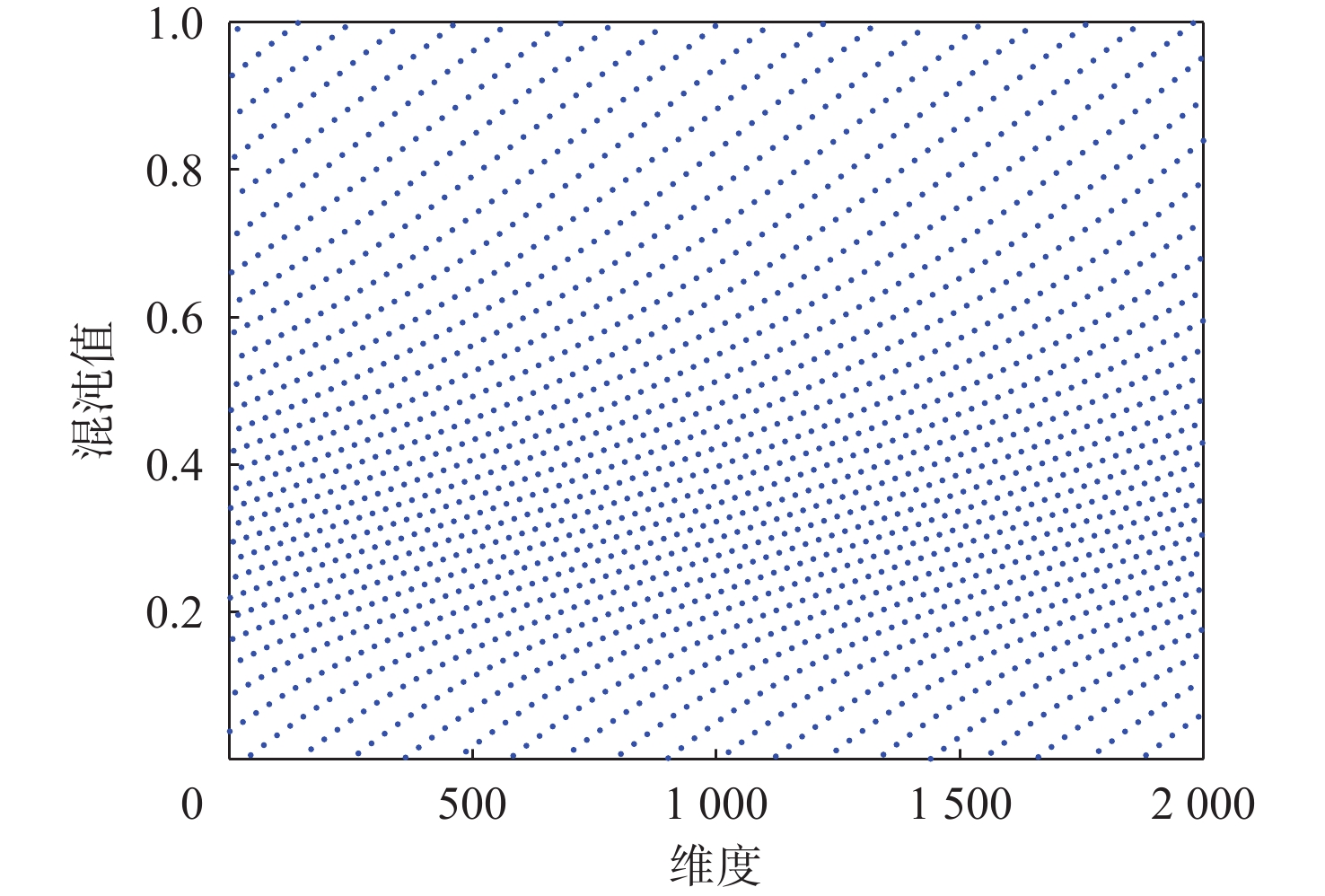
图 4 改进Circle混沌映射分布直方图
Figure 4. Distribution histogram of improved Circle chaotic mapping
表 1 基准测试函数
Table 1. Benchmark function
函数 公式 维度 搜索范围 最优值 Sphere f1(x)=n∑i=1x2i 30 [−100,100] 0 Schwefel 1.2 f2(x)=n∑i=1(i∑j=1xj)2 30 [−100,100] 0 Schwefel 2.22 f3(x)=n∑i=1|xi|+n∏i=1|xi| 30 [−10,10] 0 Rosenbrock f4(x)=n−1∑i=1[100(xi+1−x2i)2+(xi−1)2] 30 [−30,30] 0 Quartic f5(x)=n∑i=1ix4i+random[0,1) 30 [−1.28,1.28] 0 Schwefel 2.26 f6(x)=n∑i=1−xisin(√|xi|) 30 [−500,500] −418.9829D Rastrigin f7(x)=n∑i=1[x2i−10cos(2πxi)+10] 30 [−5.12,5.12] 0 Griewank f8(x)=14000n∑i=1x2i−n∏i=1cos(xi√i)+1 30 [−600,600] 0  下载: 导出CSV
下载: 导出CSV
表 2 算法参数设置
Table 2. Algorithm parameter setting
算法 参数设置 PSO w=0.9,b1=1.49445,b2=1.49445 WOA a∈[0,2],并从2线性下降 ABC limit=round(0.6dim·SN),α=1 SSA NPD=0.2Npop,NSD=0.2Npop,NST=0.8 HSSA NPD=0.2Npop,NSD=0.2Npop,NST=0.8 注:w为速度惯帧因子,b1为自我学习因子,b2为群体学习因子,a为系数向量参数,α为加速系数最大值,NPD为发现群体数量,NSD为警戒者群体数量,Npop为麻雀种群总体数量,NST为安全值。
下载: 导出CSV
表 3 不同算法性能比较
Table 3. Different algorithm performance comparison
算法 f1最优值 f1平均值 f1标准差 f2最优值 f2平均值 f2标准差 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 PSO 7.8266×10−2 1.2812×10 1.7368×10−1 2.4010×10 5.7849×10−2 6.5149 1.0177×10 2.5212×103 2.3679×10 4.7073×103 1.1637×10 1.8037×103 WOA 2.1712×10−87 2.5127×10−83 2.7104×10−73 8.0992×10−73 7.5627×10−73 2.9123×10−73 1.4619×104 3.0385×105 4.4221×104 6.3370×105 1.4604×104 1.4869×105 ABC 1.0103 3.3429×104 3.0494 4.1617×104 1.2161 4.2347×103 2.3674×104 2.2500×105 3.3160×104 2.8599×105 4.3822×103 2.4257×104 SSA 0 3.4278×10−285 7.5229×10−64 7.1855×10−62 4.1205×10−63 3.9356×10−61 0 0 4.5283×10−53 2.6559×10−50 1.8261×10−52 1.1838×10−49 HSSA 0 0 0 0 0 0 0 0 0 0 0 0 算法 f3最优值 f3平均值 f3标准差 f4最优值 f4平均值 f4标准差 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 PSO 1.5452 3.4350×10 7.6369 7.1998×10 5.0540 4.4183×10 3.6179×10 3.2169×103 1.9818×102 1.0255×104 1.4541×102 7.8634×103 WOA 4.8362×10−60 5.7468×10−58 8.9308×10−52 8.7071×10−50 2.6744×10−51 3.2665×10−49 2.7245×10 7.7556×10 2.8045×10 7.8265×10 4.3436×10−1 2.5962×10−1 ABC 7.7434×10−2 1.8097×102 1.7277×10−1 2.5012×106 6.7687×10−2 6.1799×106 3.5734×104 1.2974×107 1.1895×105 1.9164×107 8.3608×104 2.6806×106 SSA 0 0 2.2314×10−34 7.4340×10−34 1.2221×10−33 2.9924×10−33 2.7287×10−7 1.2367×10−6 1.2243×10−4 4.0708×10−4 2.7915×10−4 9.8010×10−4 HSSA 0 0 0 0 0 0 3.0903×10−9 1.3311×10−9 1.8279×10−5 9.5380×10−5 2.8747×10−5 1.8788×10−4 算法 f5最优值 f5平均值 f5标准差 f6最优值 f6平均值 f6标准差 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 PSO 1.1184×10−2 1.7785×10−2 2.4244×10−1 1.4840×10 6.7847×10−1 3.2151×10 −8.0468×103 −2.1345×104 −6.9903×103 −1.8001×104 6.8632×102 1.5812×103 WOA 6.3498×10−5 1.6010×10−4 3.1861×10−3 5.5515×10−3 3.4663×10−3 6.8377×10−3 −1.2569×104 −3.3513×104 −1.0796×104 −2.7519×104 1.6727×104 4.4798×103 ABC 6.6656×10−2 7.9981×10 2.4620×10−1 1.8093×102 6.5205×10−2 3.9405×10 −6.1723×103 −1.0288×104 −5.0231×103 −8.4095×103 3.8759×102 7.5729×102 SSA 2.9224×10−5 7.4100×10−5 6.8172×10−4 6.3589×10−4 5.2774×10−4 5.4482×10−4 −8.9290×103 −2.1726×104 −7.8563×103 −1.9349×104 6.2220×102 1.3935×103 HSSA 1.6312×10−6 1.1632×10−6 7.2701×10−5 8.0308×10−5 6.0700×10−5 6.6827×10−5 −1.1463×104 −2.6134×104 −8.6946×103 −2.3089×104 9.4777×102 2.0416×103 算法 f7最优值 f7平均值 f7标准差 f8最优值 f8平均值 f8标准差 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 30维度 80维度 PSO 4.6017×10 2.9785×102 7.4888×10 3.6656×102 2.0656×10 4.3011×10 3.0326×10−2 1.9514 1.2749×10−1 6.9988 6.3700×10−2 3.0342 WOA 0 0 0 1.1369×10−15 0 4.5768×10−15 0 0 6.5410×10−3 8.9356×10−3 3.5826×10−2 4.8943×10−2 ABC 1.9322×102 6.4124×102 8.3605×102 2.3044×102 1.3884×10 4.1130×10 6.5856×10−1 2.9809×102 9.8984×10−1 3.5744×102 7.4134×10−2 3.5119×10 SSA 0 0 0 0 0 0 0 0 0 0 0 0 HSSA 0 0 0 0 0 0 0 0 0 0 0 0
下载: 导出CSV
表 4 Wilcoxon秩和检验P值
Table 4. P values for Wilcoxon rank-sum test
函数 解维度为30时 解维度为80时 PSO WOA ABC SSA PSO WOA ABC SSA f1 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 f2 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 f3 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 1.2118×10−12 f4 3.0199×10−11 3.0199×10−11 3.0199×10−11 4.0772×10−11 3.0199×10−11 3.0199×10−11 3.0199×10−11 6.0658×10−11 f5 3.0199×10−11 3.0199×10−11 3.0199×10−11 3.0199×10−11 3.0199×10−11 3.0199×10−11 3.0199×10−11 3.0199×10−11 f6 3.0199×10−11 3.0199×10−11 3.0199×10−11 7.3891×10−11 3.3384×10−11 3.0199×10−11 3.0199×10−11 5.5329×10−8 f7 1.2118×10−12 3.2801×10−7 1.2118×10−12 − 1.2118×10−12 1.4000×10−4 1.2118×10−12 − f8 1.2118×10−12 1.9457×10−9 1.2118×10−12 − 1.2118×10−12 1.4552×10−4 1.2118×10−12 −
下载: 导出CSV
表 5 不同改进SSA算法性能比较
Table 5. Performance comparison of different improved SSA
算法 f1 f2 f3 f4 最优值 平均值 标准差 最优值 平均值 标准差 最优值 平均值 标准差 最优值 平均值 标准差 ISSA 0 1.13×10−81 4.42×10−81 0 6.28×10−93 1.49×10−92 0 9.25×10−49 3.20×10−48 7.85×10−7 9.16×10−6 1.44×10−5 HSSA 0 0 0 0 0 0 0 0 0 3.17×10−11 4.37×10−6 6.98×10−6 算法 f5 f6 f7 f8 最优值 平均值 标准差 最优值 平均值 标准差 最优值 平均值 标准差 最优值 平均值 标准差 ISSA 2.11×10−5 3.20×10−4 2.13×10−4 −1.26×104 −1.26×104 2.70×10−1 0 0 0 0 0 0 HSSA 2.26×10−6 5.04×10−5 4.45×10−5 −1.14×104 −8.87×103 7.01×102 0 0 0 0 0 0
下载: 导出CSV
表 6 不同改进策略性能比较
Table 6. Performance comparison of different improvement strategies
算法 f1 f2 最优值 平均值 标准差 最优值 平均值 标准差 SSA 0 7.5229×10−64 4.1205×10−63 0 4.5283×10−53 1.8261×10−52 FSSA 0 0 0 0 0 0 JSSA 0 1.0968×10−69 6.0072×10−69 1.8655×10−232 5.6152×10−73 3.0754×10−72 ZSSA 0 1.2469×10−75 6.8296×10−75 0 7.1562×10−61 3.9196×10−62 MSSA 0 2.1033×10−74 1.1520×10−73 0 3.6053×10−53 1.9747×10−52 HSSA 0 0 0 0 0 0 算法 f3 f4 最优值 平均值 标准差 最优值 平均值 标准差 SSA 0 2.2314×10−34 1.2221×10−33 2.7287×10−7 1.2243×10−4 2.7915×10−4 FSSA 0 0 0 6.6257×10−8 2.2162×10−4 4.1812×10−4 JSSA 4.0143×10−205 9.6876×10−35 5.2114×10−33 4.4375×10−8 1.1542×10−4 2.3480×10−4 ZSSA 0 1.3695×10−36 7.5600×10−36 3.8087×10−8 1.5027×10−5 3.7874×10−5 MSSA 0 1.2196×10−39 6.6790×10−39 3.2697×10−8 7.8910×10−5 1.5986×10−4 HSSA 0 0 0 3.0903×10−9 1.8279×10−5 2.8747×10−5 算法 f5 f6 最优值 平均值 标准差 最优值 平均值 标准差 SSA 2.9224×10−5 6.8172×10−4 5.2774×10−4 −8.9290×103 −7.8563×103 6.2220×102 FSSA 1.6271×10−5 2.4741×10−4 2.2118×10−4 −1.0214×104 −8.5659×103 7.7704×102 JSSA 1.7568×10−5 4.3131×10−4 4.5376×10−4 −1.0555×104 −8.6250×103 6.1708×102 ZSSA 8.6875×10−6 3.0508×10−4 3.1683×10−4 −9.5045×103 −8.4983×103 8.1482×102 MSSA 4.3844×10−6 4.1541×10−4 4.2651×10−4 −9.7063×103 −8.4040×103 7.8980×102 HSSA 1.6312×10−6 7.2701×10−5 6.0701×10−5 −1.1463×104 −8.6946×103 9.4777×102 算法 f7 f8 最优值 平均值 标准差 最优值 平均值 标准差 SSA 0 0 0 0 0 0 FSSA 0 0 0 0 0 0 JSSA 0 0 0 0 0 0 ZSSA 0 0 0 0 0 0 MSSA 0 0 0 0 0 0 HSSA 0 0 0 0 0 0
下载: 导出CSV
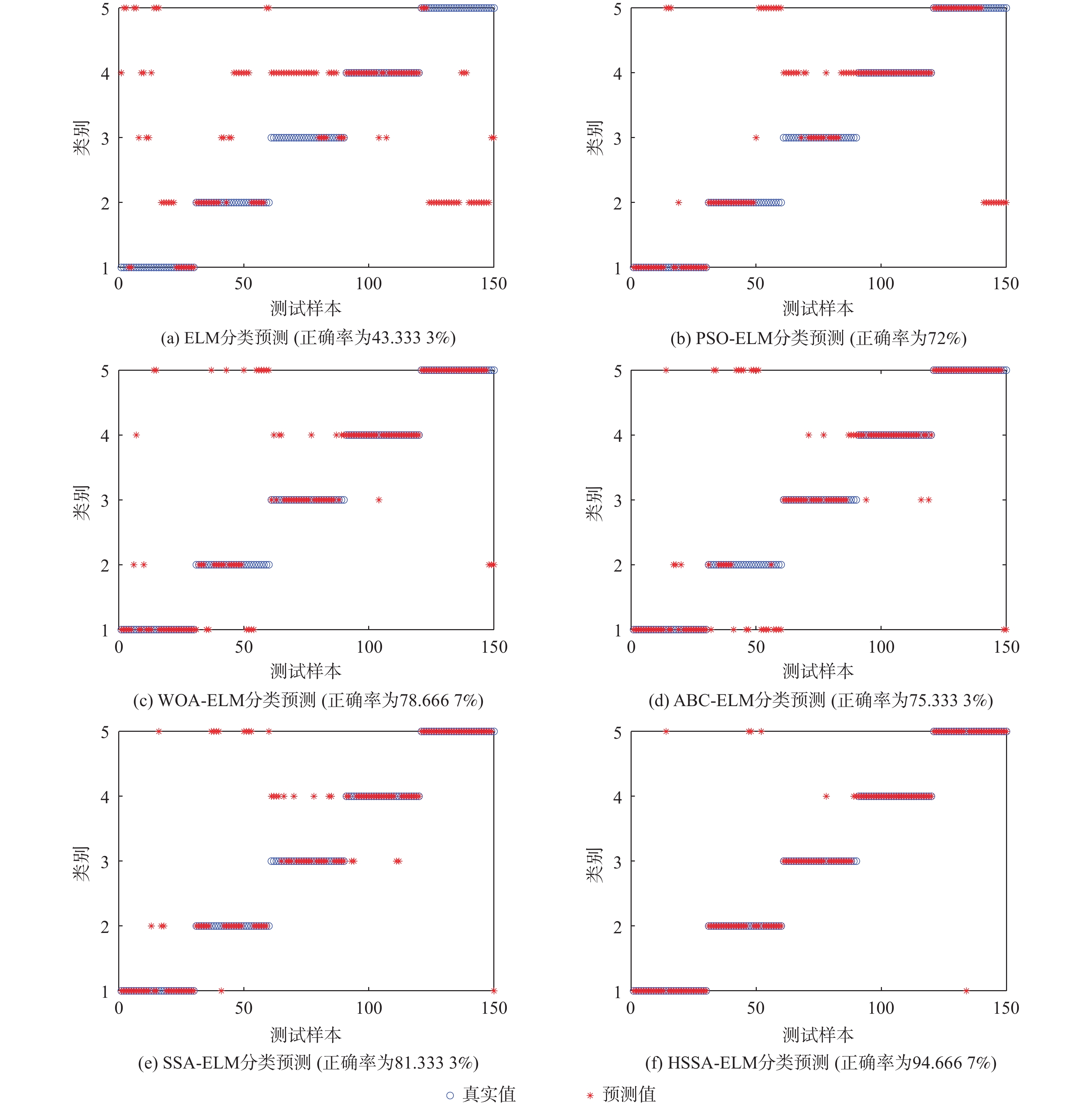
表 8 算法分类预测精度比较
Table 8. Comparison of classification and prediction accuracy of algorithms
% 算法类别 最优预测精度 平均预测精度 ELM 54.67 42.67 PSO-ELM 78.00 70.89 WOA-ELM 82.33 77.56 ABC-ELM 76.67 72.42 SSA-ELM 84.00 80.17 HSSA-ELM 96.00 90.87
下载: 导出CSV
-
[1] XUE J K, SHEN B. A novel swarm intelligence optimization approach: Sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8(1): 22-34. [2] WANG D S, TAN D P, LIU L. Particle swarm optimization algorithm: An overview[J]. Soft Computing, 2018, 22(2): 387-408. doi: 10.1007/s00500-016-2474-6 [3] KARABOGA D, OZTURK C. A novel clustering approach: Artificial bee colony (ABC) algorithm[J]. Applied Soft Computing, 2011, 11(1): 652-657. doi: 10.1016/j.asoc.2009.12.025 [4] 吕鑫, 慕晓冬, 张钧. 基于改进麻雀搜索算法的多阈值图像分割[J]. 系统工程与电子技术, 2021, 43(2): 318-327. doi: 10.12305/j.issn.1001-506X.2021.02.05LV X, MU X D, ZHANG J. Multi-threshold image segmentation based on improved sparrow search algorithm[J]. Systems Engineering and Electronics, 2021, 43(2): 318-327(in Chinese). doi: 10.12305/j.issn.1001-506X.2021.02.05 [5] 汤安迪, 韩统, 徐登武, 等. 基于混沌麻雀搜索算法的无人机航迹规划方法[J]. 计算机应用, 2021, 41(7): 2128-2136.TANG A D, HAN T, XU D W, et al. Path planning method of unmanned aerial vehicle based on chaos sparrow search algorithm[J]. Journal of Computer Applications, 2021, 41(7): 2128-2136(in Chinese). [6] 黄敬宇. 融合t分布和Tent混沌映射的麻雀搜索算法研究[D]. 兰州: 兰州大学, 2021.HUANG J Y. Research on sparrow search algorithm based on fusion of t distribution and tent chaotic mapping[D]. Lanzhou: Lanzhou University, 2021(in Chinese). [7] 徐健, 陈倩倩, 刘秀平. 基于交叉运算的人工蜂群优化BP神经网络的脑电信号分类[J]. 激光与光电子学进展, 2020, 57(21): 244-253.XU J, CHEN Q Q, LIU X P. Classification of electroencephalography based on BP neural network optimized by crossover operation of artificial bee colonies[J]. Laser & Optoelectronics Progress, 2020, 57(21): 244-253(in Chinese). [8] 刘栋, 魏霞, 王维庆, 等. 基于SSA-ELM的短期风电功率预测[J]. 智慧电力, 2021, 49(6): 53-59.LIU D, WEI X, WANG W Q, et al. Short-term wind power prediction based on SSA-ELM[J]. Smart Power, 2021, 49(6): 53-59(in Chinese). [9] 蒋艳会, 李峰. 基于混沌粒子群算法的多阈值图像分割[J]. 计算机工程与应用, 2010, 46(10): 175-176. doi: 10.3778/j.issn.1002-8331.2010.10.055JIANG Y H, LI F. Multi-threshold method of image segmentation based on chaotic particle swarm optimization algorithm[J]. Computer Engineering and Applications, 2010, 46(10): 175-176(in Chinese). doi: 10.3778/j.issn.1002-8331.2010.10.055 [10] HUANG G B, WANG D H, LAN Y. Extreme learning machines: a survey[J]. International Journal of Machine Learning and Cybernetics, 2011, 2(2): 107-122. doi: 10.1007/s13042-011-0019-y [11] 吕鑫, 慕晓冬, 张钧, 等. 混沌麻雀搜索优化算法[J]. 北京航空航天大学学报, 2021, 47(8): 1712-1720.LYU X, MU X D, ZHANG J, et al. Chaos sparrow search optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1712-1720(in Chinese). [12] HERBADJI D, DEROUICHE N, BELMEGUENAI A, et al. A tweakable image encryption algorithm using an improved logistic chaotic map[J]. Traitement Du Signal, 2019, 36(5): 407-417. doi: 10.18280/ts.360505 [13] ARORA S, ANAND P. Chaotic grasshopper optimization algorithm for global optimization[J]. Neural Computing and Applications, 2019, 31(8): 4385-4405. doi: 10.1007/s00521-018-3343-2 [14] 张达敏, 徐航, 王依柔, 等. 嵌入Circle映射和逐维小孔成像反向学习的鲸鱼优化算法[J]. 控制与决策, 2021, 36(5): 1173-1180.ZHANG D M, XU H, WANG Y R, et al. Whale optimization algorithm for embedded Circle mapping and onedimensional oppositional learning based small hole imaging[J]. Control and Decision, 2021, 36(5): 1173-1180(in Chinese). [15] MIRJALILI S, GANDOMI A H, MIRJALILI S Z, et al. Salp swarm algorithm: A bio-inspired optimizer for engineering design problems[J]. Advances in Engineering Software, 2017, 114: 163-191. doi: 10.1016/j.advengsoft.2017.07.002 [16] LI J N, LE M L. Improved whale optimization algorithm based on mirror selection[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2020, 37(S): 115-123. [17] TIZHOOSH H R. Opposition-based learning: a new scheme for machine intelligence[C]//International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC’06). Piscataway: IEEE Press, 2006: 695-701. [18] SUMAN B, KUMAR P. A survey of simulated annealing as a tool for single and multiobjective optimization[J]. Journal of the Operational Research Society, 2006, 57(10): 1143-1160. doi: 10.1057/palgrave.jors.2602068 [19] SHADRAVAN S, NAJI H R, BARDSIRI V K. The sailfish optimizer: A novel nature-inspired metaheuristic algorithm for solving constrained engineering optimization problems[J]. Engineering Applications of Artificial Intelligence, 2019, 80: 20-34. doi: 10.1016/j.engappai.2019.01.001 [20] MIRJALILI S, LEWIS A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. doi: 10.1016/j.advengsoft.2016.01.008 [21] 黄海燕, 彭虎, 邓长寿, 等. 均匀局部搜索和高斯变异的布谷鸟搜索算法[J]. 小型微型计算机系统, 2018, 39(7): 1451-1458. doi: 10.3969/j.issn.1000-1220.2018.07.015HUANG H Y, PENG H, DENG C S, et al. Cuckoo search algorithm of uniform local search and Gauss mutation[J]. Journal of Chinese Computer Systems, 2018, 39(7): 1451-1458(in Chinese). doi: 10.3969/j.issn.1000-1220.2018.07.015 [22] 付华, 刘昊. 多策略融合的改进麻雀搜索算法及其应用[J]. 控制与决策, 2022, 37(1): 87-96. doi: 10.13195/j.kzyjc.2021.0582FU H, LIU H. Improved sparrow search algorithm with multi-strategy integration and its application[J]. Control and Decision, 2022, 37(1): 87-96(in Chinese). doi: 10.13195/j.kzyjc.2021.0582 [23] 刘小娟, 王联国. 一种基于差分进化的正弦余弦算法[J]. 工程科学学报, 2020, 42(12): 1674-1684.LIU X J, WANG L G. A sine cosine algorithm based on differential evolution[J]. Chinese Journal of Engineering, 2020, 42(12): 1674-1684(in Chinese). [24] 唐延强, 李成海, 宋亚飞, 等. 自适应变异麻雀搜索优化算法[J]. 北京航空航天大学学报, 2023, 49(3): 681-692. doi: 10.13700/j.bh.1001-5965.2021.0282TANG Y Q, LI C H, SOMG Y F, et al. Adaptive mutation sparrow search optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(3): 681-692(in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0282 [25] 毛清华, 张强. 融合柯西变异和反向学习的改进麻雀算法[J]. 计算机科学与探索, 2021, 15(6): 1155-1164. doi: 10.3778/j.issn.1673-9418.2010032MAO Q H, ZHANG Q. Improved sparrow algorithm combining Cauchy mutation and opposition-based learning[J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(6): 1155-1164(in Chinese). doi: 10.3778/j.issn.1673-9418.2010032 [26] 张强, 李盼池, 王梅. 基于自适应进化策略的人工蜂群优化算法[J]. 电子科技大学学报, 2019, 48(4): 560-566. doi: 10.3969/j.issn.1001-0548.2019.04.013ZHANG Q, LI P C, WANG M. Artificial bee colony optimization algorithm based on adaptive evolution strategy[J]. Journal of University of Electronic Science and Technology of China, 2019, 48(4): 560-566(in Chinese). doi: 10.3969/j.issn.1001-0548.2019.04.013 [27] 佟丽娜, 侯增广, 彭亮, 等. 基于多路sEMG时序分析的人体运动模式识别方法[J]. 自动化学报, 2014, 40(5): 810-821.TONG L N, HOU Z G, PENG L, et al. Multi-channel sEMG time series analysis based human motion recognition method[J]. Acta Automatica Sinica, 2014, 40(5): 810-821(in Chinese). [28] 刘冰, 李宁, 于鹏, 等. 上肢康复外骨骼机器人控制方法进展研究[J]. 电子科技大学学报, 2020, 49(5): 643-651. doi: 10.12178/1001-0548.2020212LIU B, LI N, YU P, et al. Research on the control methods of upper limb rehabilitation exoskeleton robot[J]. Journal of University of Electronic Science and Technology of China, 2020, 49(5): 643-651(in Chinese). doi: 10.12178/1001-0548.2020212 期刊类型引用(17)
1. 耿敬,李秋洁,李向阳,李明伟. 基于LCZOA算法的季冻区大型水利工程建设进度优化方法研究. 工程管理学报. 2025(02): 86-92 .  百度学术
百度学术2. 张琴,蔡慧茹,兰明东,浦克,胡雄. 基于改进麻雀优化PID的波浪补偿控制方法. 工程科学与技术. 2024(01): 22-34 . 百度学术3. 王彦快,米根锁,孔得盛,杨建刚,张玉. 基于MDS和改进SSA-SVM的高速铁路道岔故障诊断方法研究. 铁道学报. 2024(01): 81-90 . 百度学术4. 夏煌智,陈丽敏,毛雪迪. 融入动态学习与高斯变异的自适应秃鹰搜索算法. 计算机与现代化. 2024(01): 117-126 . 百度学术5. 杜云,周志奇,贾科进,丁力,卢孟杨林. 混合多项自适应权重的混沌麻雀搜索算法. 计算机工程与应用. 2024(07): 70-83 . 百度学术6. 张迎春,姜岚,唐波,陈曦,胡辉. 基于改进麻雀搜索算法的变电构架优化方法. 振动与冲击. 2024(07): 94-101 . 百度学术7. 游志平,马宏,梁群,王冠华. 基于IDBO-KELM的汽车零部件激光熔覆几何形貌预测建模方法研究. 应用激光. 2024(03): 51-62 . 百度学术8. 马夏敏,张雷克,刘小莲,田雨,王雪妮,邓显羽. 基于麻雀搜索算法的梯级泵站优化调度. 水力发电学报. 2024(05): 43-53 . 百度学术9. 王攀,胡业林. 基于改进麻雀算法的配电网故障定位. 哈尔滨商业大学学报(自然科学版). 2024(03): 307-314 . 百度学术10. 王晨,周雪松,马幼捷,赵明,王鸿斌,赵家欣. 基于混合策略麻雀搜索算法优化的DC-DC变换器自抗扰稳压策略. 国外电子测量技术. 2024(07): 46-56 . 百度学术11. 李嘉轩,于惠钧,马凡烁,刘紫英. 基于LF-ATSO算法在光伏系统MPPT中的研究. 现代电子技术. 2024(21): 149-155 . 百度学术12. 李易达,王雨欣,李晨曦,赵冀,马恢,张漫,李寒. 融合改进头脑风暴与Powell算法的马铃薯多模态图像配准. 农业工程学报. 2024(19): 146-158 . 百度学术13. 王基臣,许亮,张紫叶. 改进DBO优化CRJ网络的PEMFC剩余使用寿命预测. 电源技术. 2024(11): 2295-2303 . 百度学术14. 李东升,朱奎,郭艳军,张树健,高明星,韩旭航. 组合神经网络的城市用水量预测模型研究与应用. 中国水利水电科学研究院学报(中英文). 2024(06): 579-589 . 百度学术15. 苏莹莹,王升旭,白智超. 基于ISSA的多渠道易腐品供应链网络规划. 运筹与管理. 2024(11): 111-117 . 百度学术16. 李涵,李文敬. 混合策略改进的金枪鱼群优化算法. 广西科学. 2023(01): 208-218 . 百度学术17. 李泽政,刘卫星,李飞,李一帆,杨爱民. 基于数据增强的烧结矿转鼓强度预测研究. 烧结球团. 2023(06): 62-68 . 百度学术其他类型引用(50)
-

 下载:
下载:
 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 916
- HTML全文浏览量: 215
- PDF下载量: 87
- 被引次数: 67
