



-
摘要:
为解决传统过渡走廊中忽略系统动态特征、缺少迎角信息、难以直接用于过渡路径规划的问题,提出一种适用于倾转动力类无人机的三维过渡走廊建立方法。所提方法从物理约束角度限制飞行速度与倾转角度边界,从飞行力学角度限制全机升力特性边界,从能源配置角度限制动力系统功率边界,从而建立关于飞行速度、倾转角度与迎角的三维过渡走廊,并且设计综合性能指标函数用于描述走廊内各飞行路径点的性能。基于所建三维过渡走廊采用鸽群优化算法完成最优过渡路径的搜索工作。结果表明:所建三维过渡走廊能够更加具体地描述可用飞行范围,其不仅包括传统过渡走廊的飞行速度与倾转角度,同时还包含迎角与性能指标信息,这为过渡路径规划提供基础;鸽群优化算法具有良好的过渡路径优化能力,通过优化使无人机拥有良好的飞行效果,动力系统油门杆量变化平稳、幅值较小,证明使用三维过渡走廊指导过渡飞行与规划过渡路径的可行性。
Abstract:In this paper, a three-dimensional transition corridor establishment method suitable for tilt-propulsion kind unmanned aerial vehicle is proposed to solve the problem that the dynamic characteristics are ignored and the angle of attack information is missing in the traditional transition corridor, which makes it difficult to be directly used in transition path planning. In order to establish the three-dimensional transition corridor about flight speed, tilt angle, and angle of attack, the proposed method limits the boundaries of lift characteristics of the entire aircraft from the perspective of flight mechanics, the power boundary of the propulsion system from the perspective of energy allocation, and the boundary of flight speed and tilt angle from the perspective of physical constraints. Then, a comprehensive performance function is designed to describe the performance of each flight path point in the corridor. Based on this three-dimensional transition corridor, the pigeon-inspired optimization algorithm is used to complete the search for the optimal transition path. The findings indicate that the three-dimensional transition corridor could serve as a foundation for the transition path planning and more precisely characterize the available flight envelope, which includes information on the angle of attack, performance index, and flight speed in addition to the traditional transition corridor's tilt angle and flight speed. The optimal transition path makes the unmanned aerial vehicle have a good flight effect, the throttle lever of the propulsion system is adjusted smoothly and the amplitude is small, which proves the feasibility of using the three-dimensional transition corridor to guide the transition flight and plan the transition path.
-
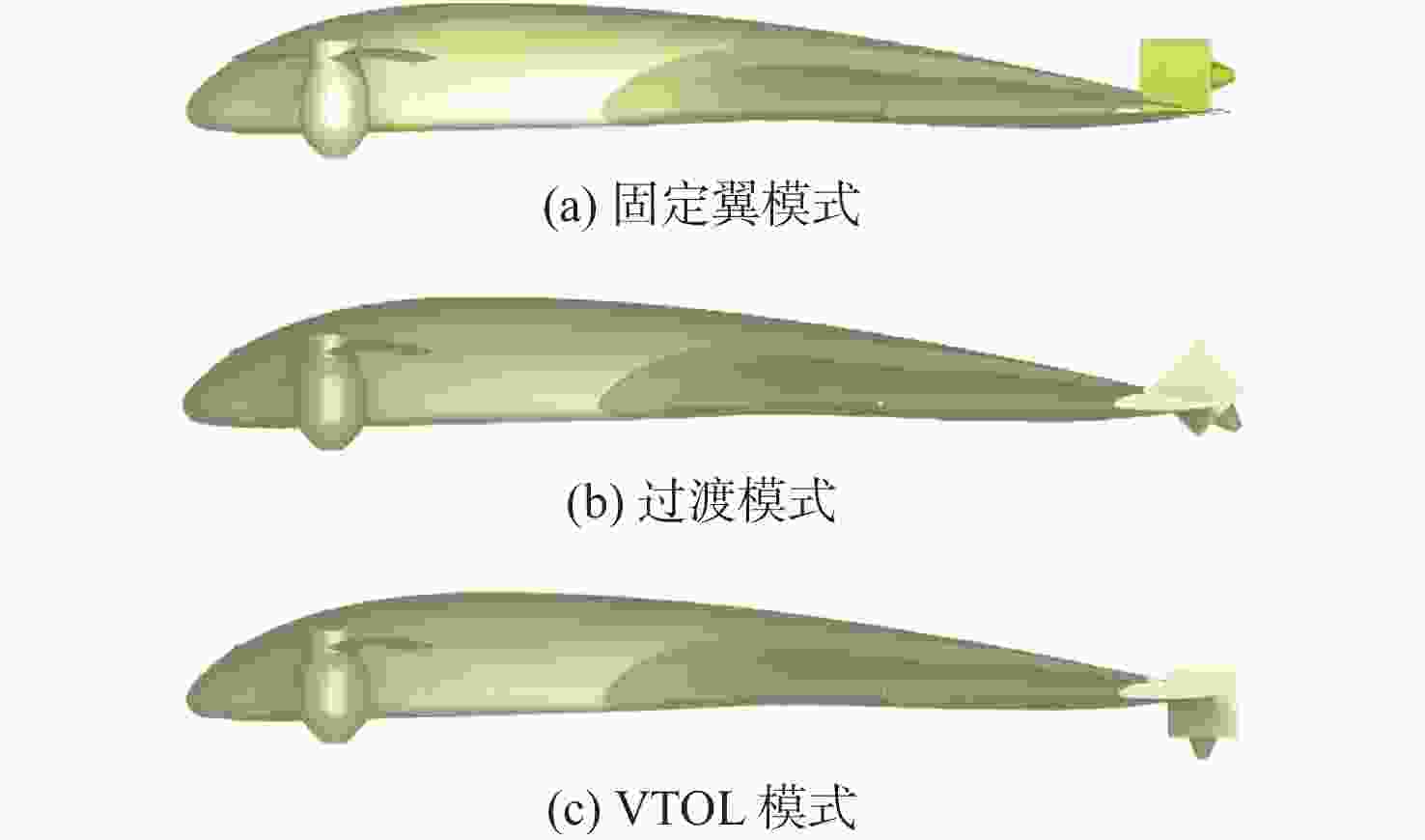
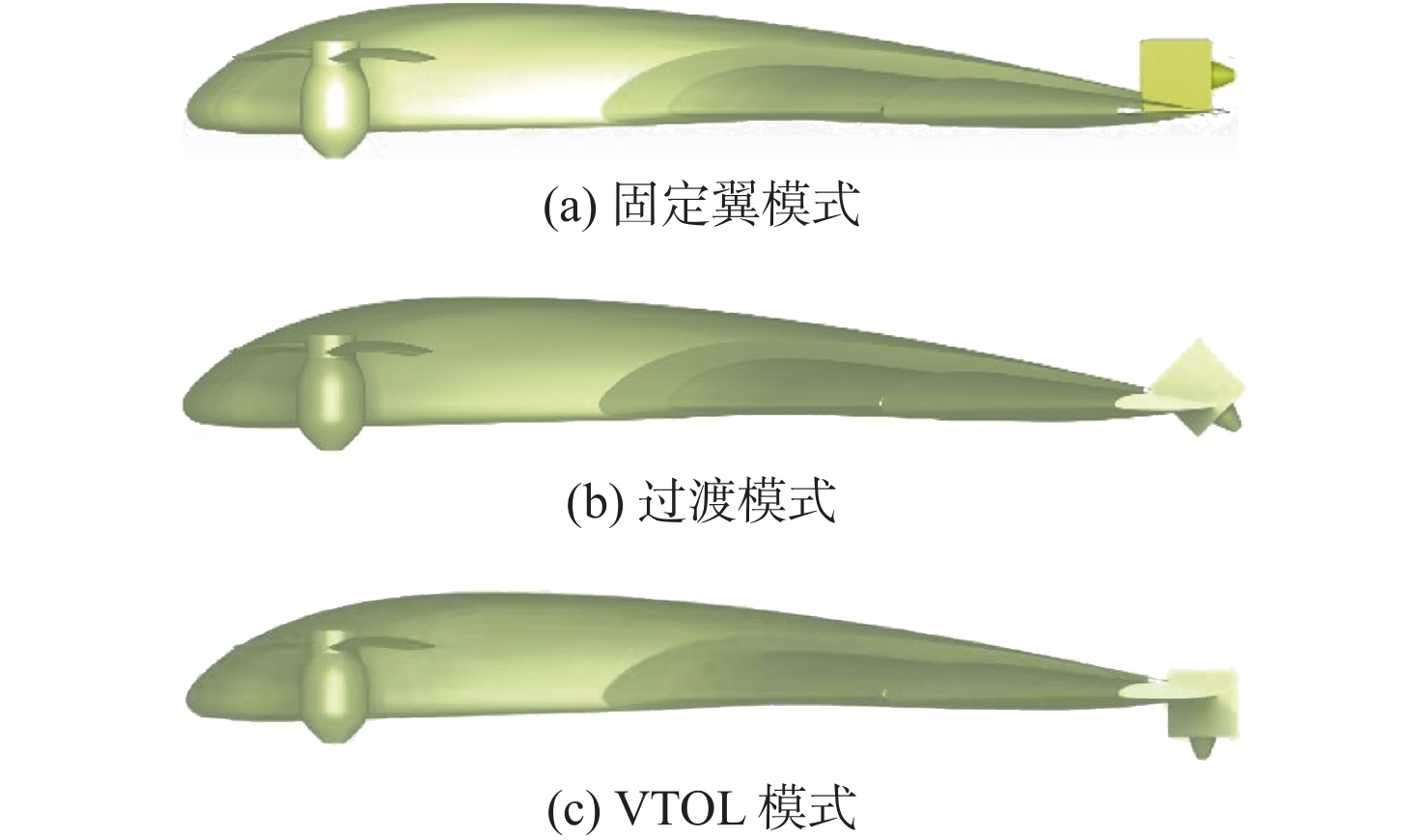
图 2 倾转动力无人机3种飞行模式
Figure 2. Three flight modes of tilt-propulsion unmanned aerial vehicle
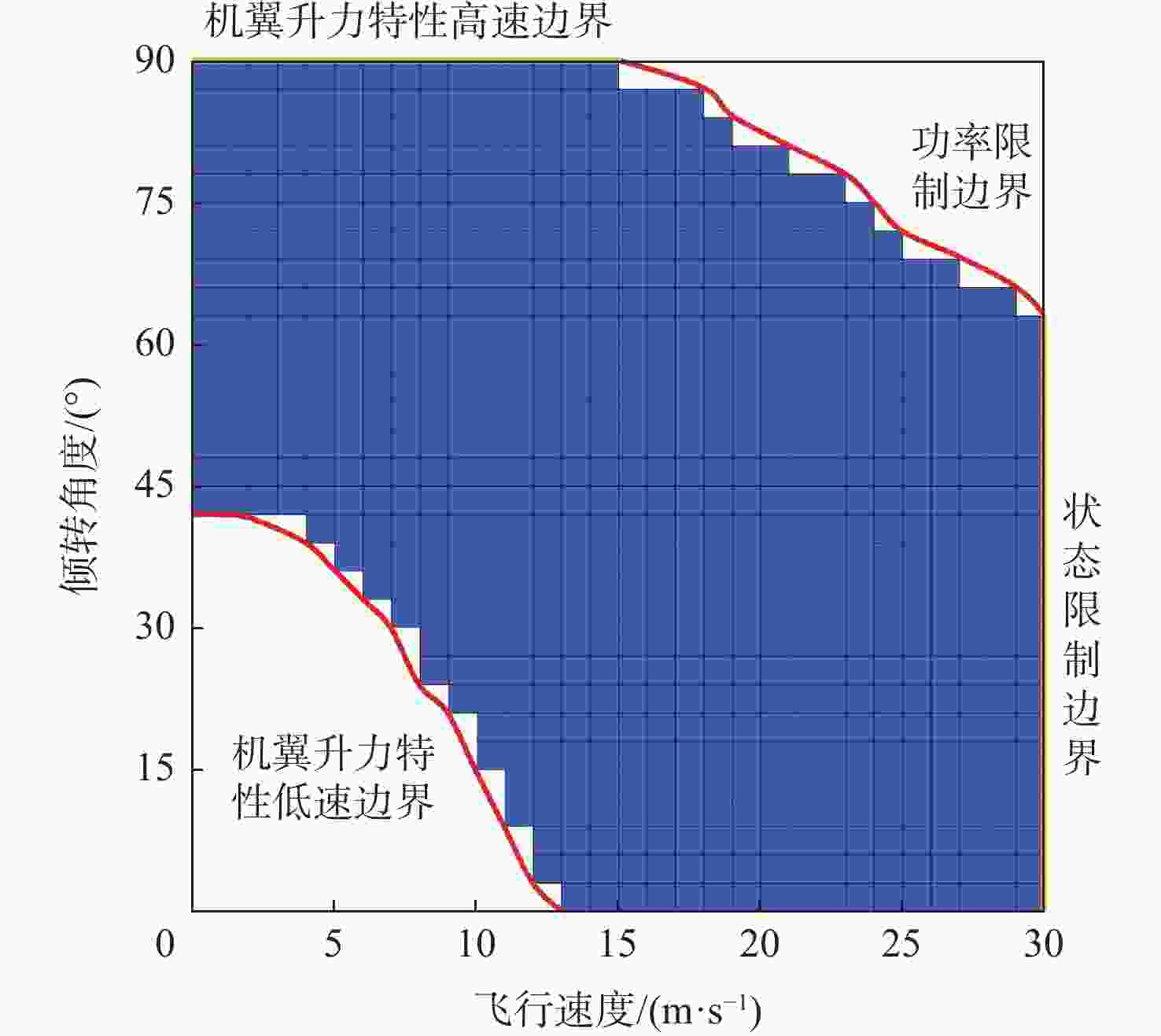
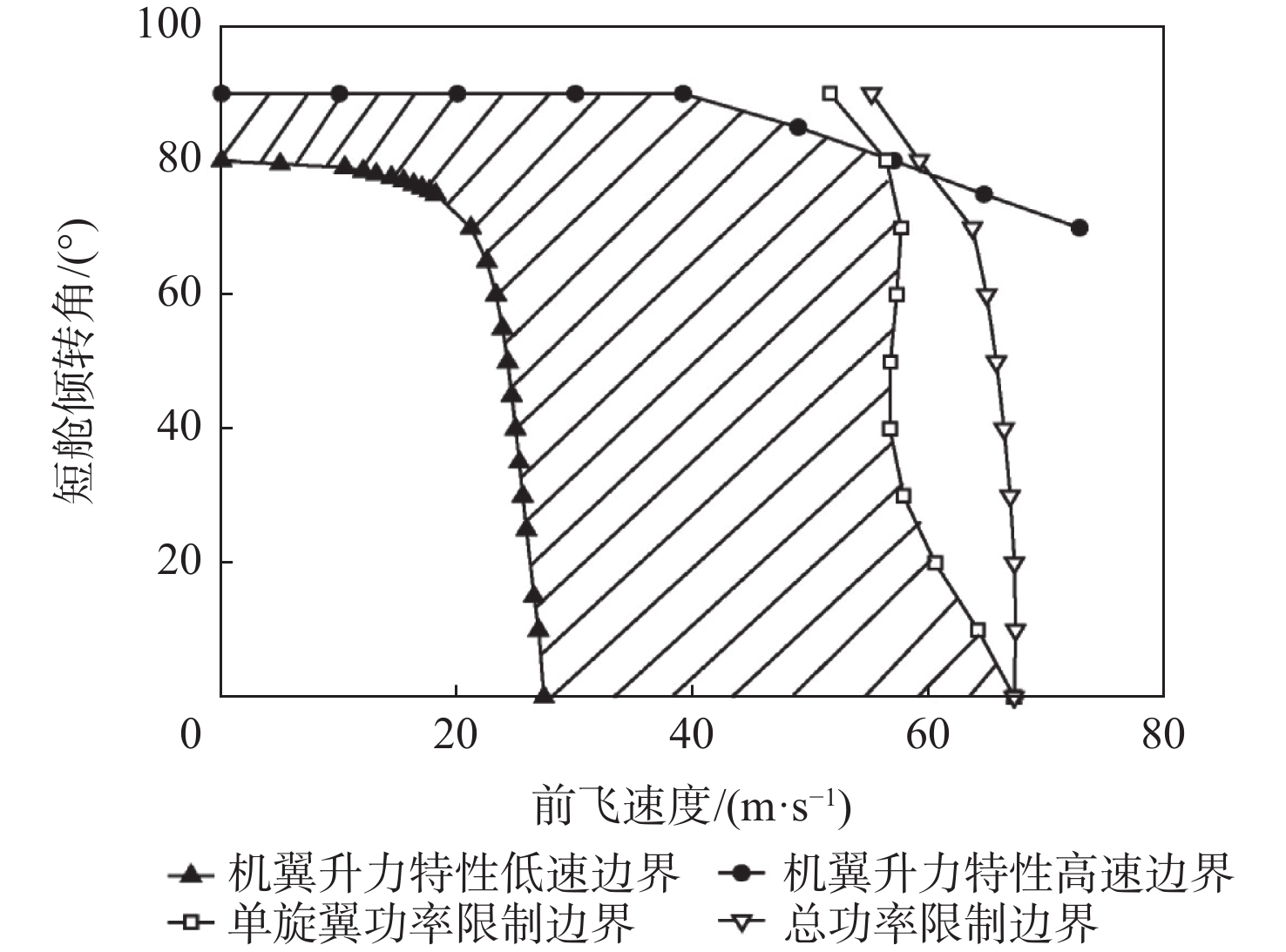
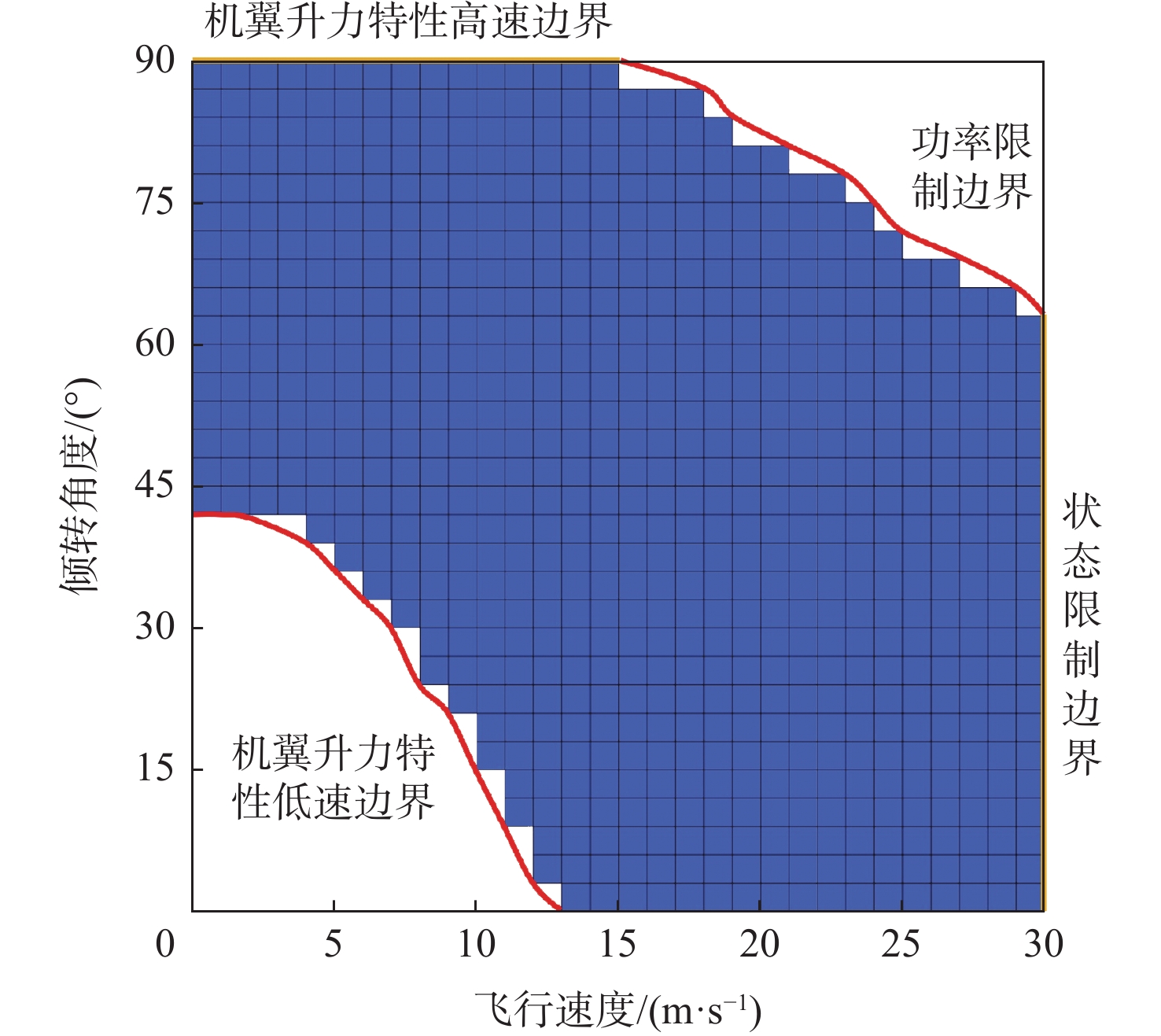
图 11 三维过渡走廊速度-倾转角关系图
Figure 11. Relationship between flight speed and tilt angle of 3D transition corridor
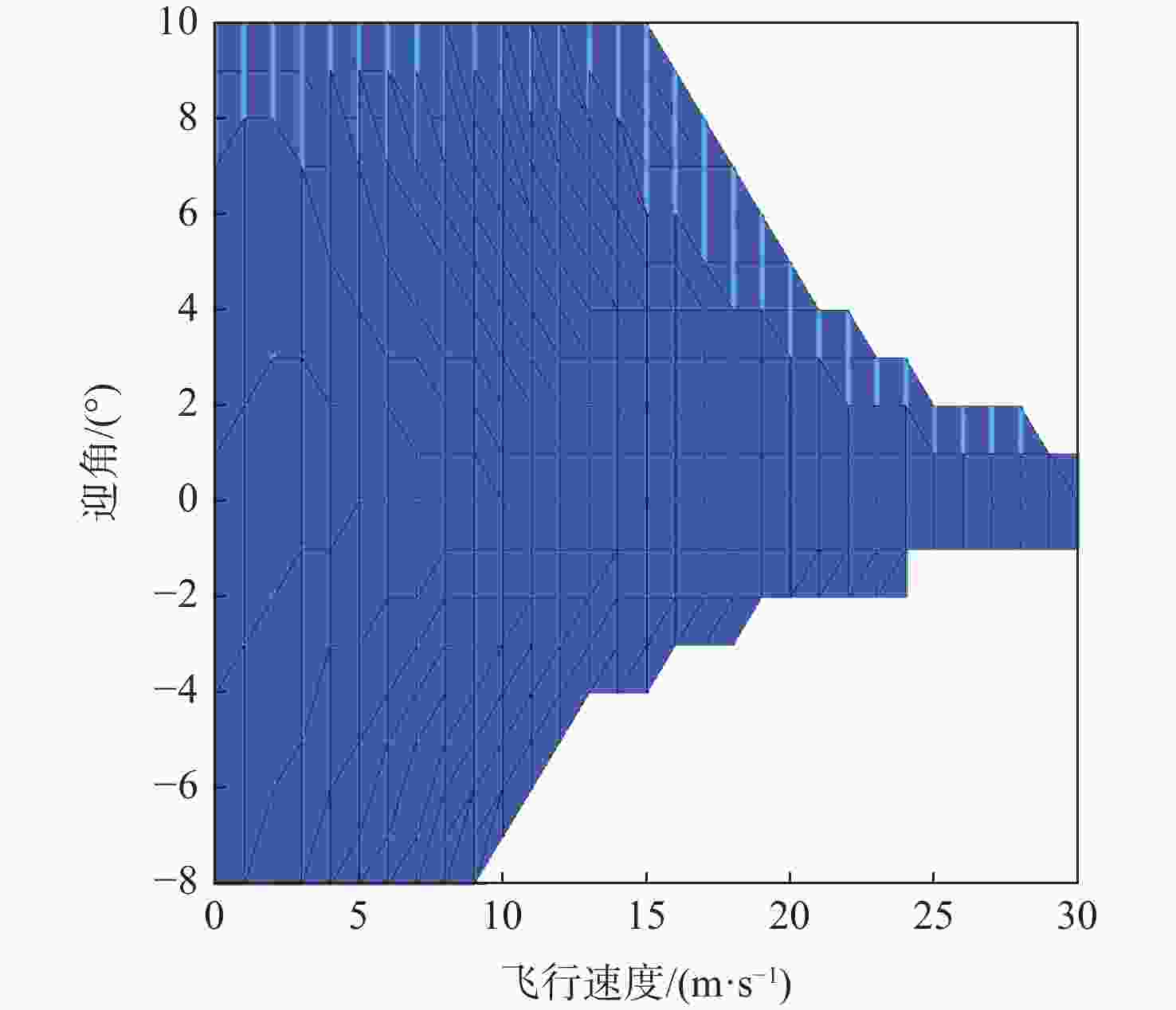
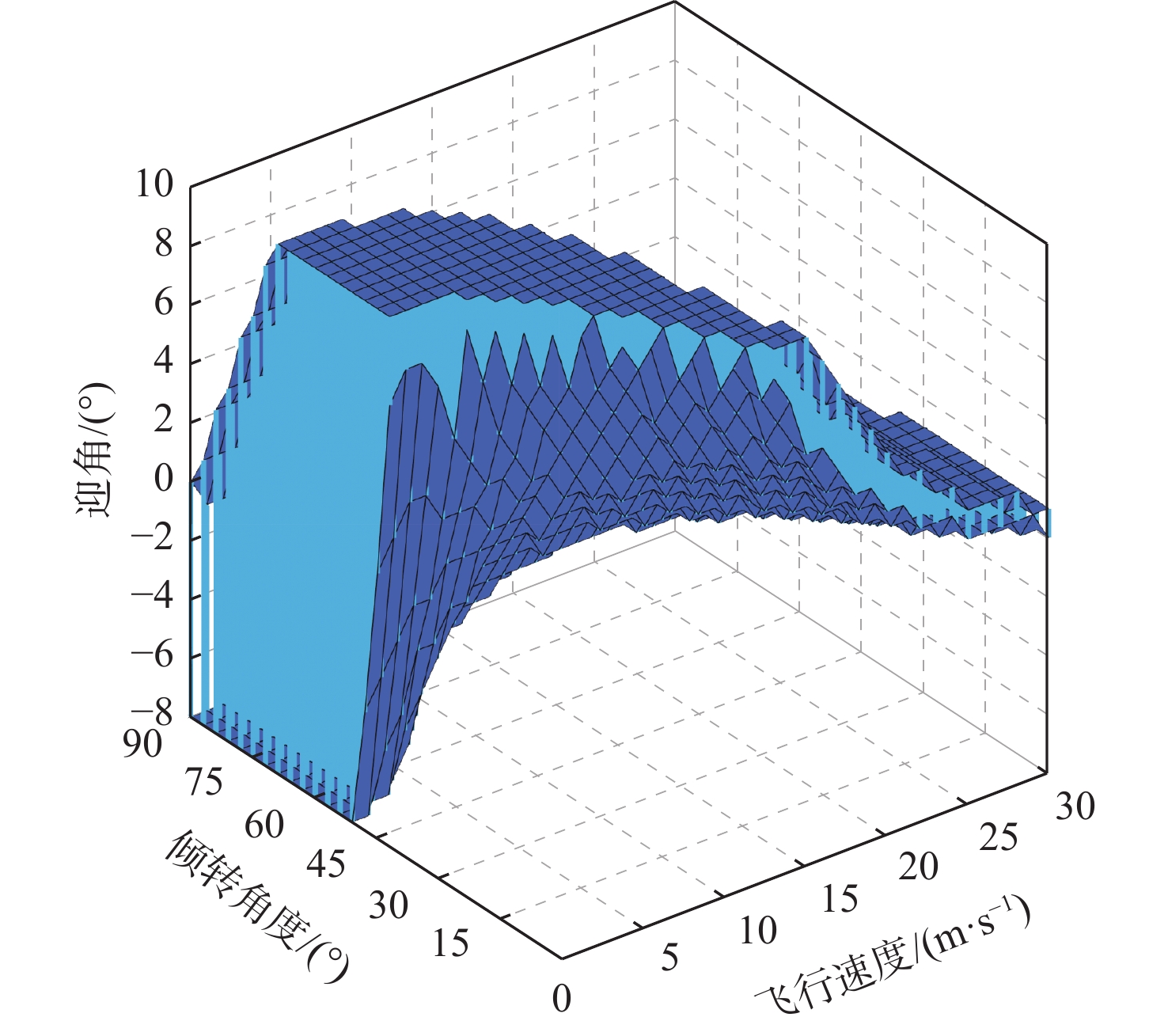
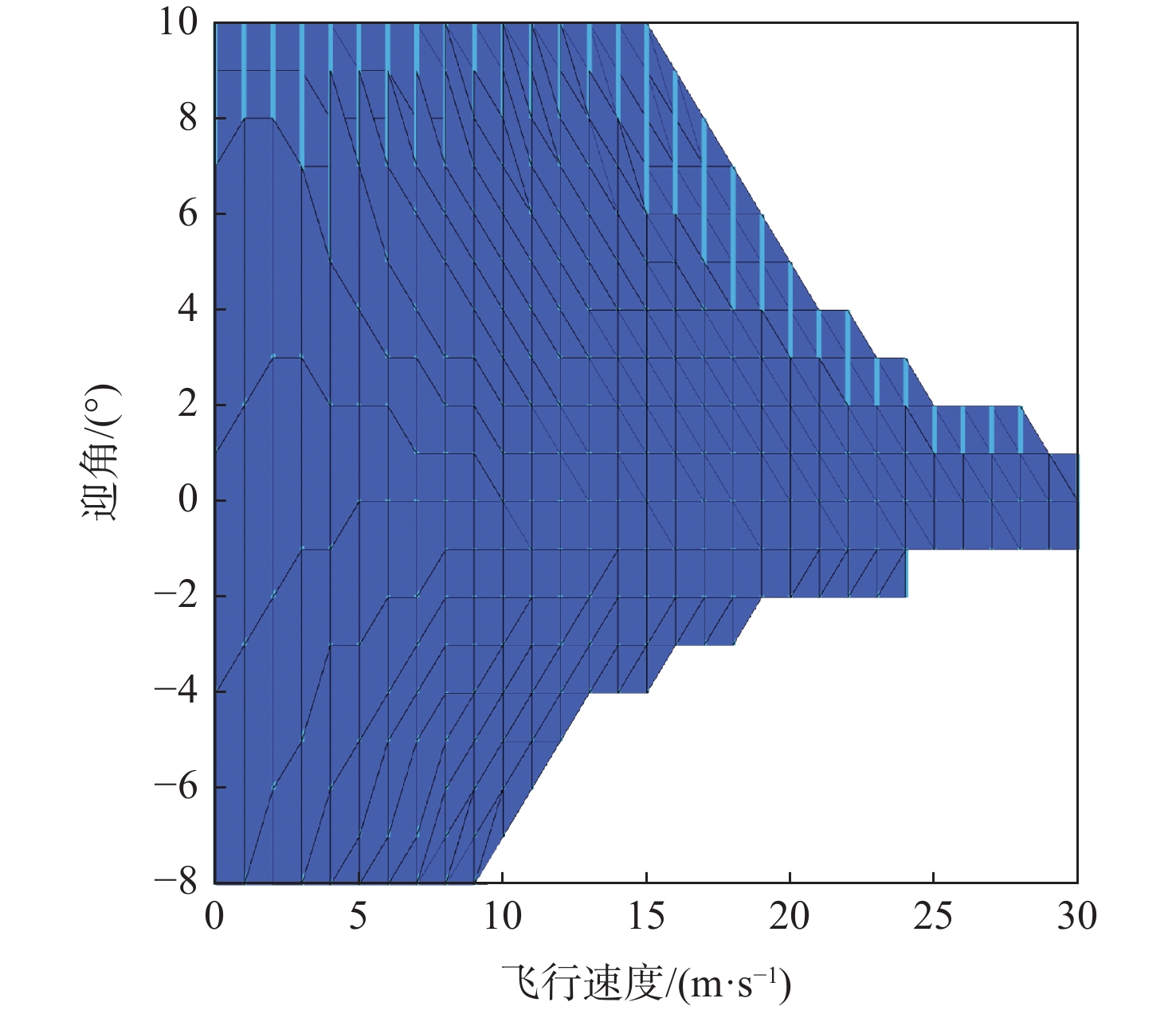
图 12 三维过渡走廊飞行速度-迎角关系图
Figure 12. Relationship between flight speed and attack angle of 3D transition corridor
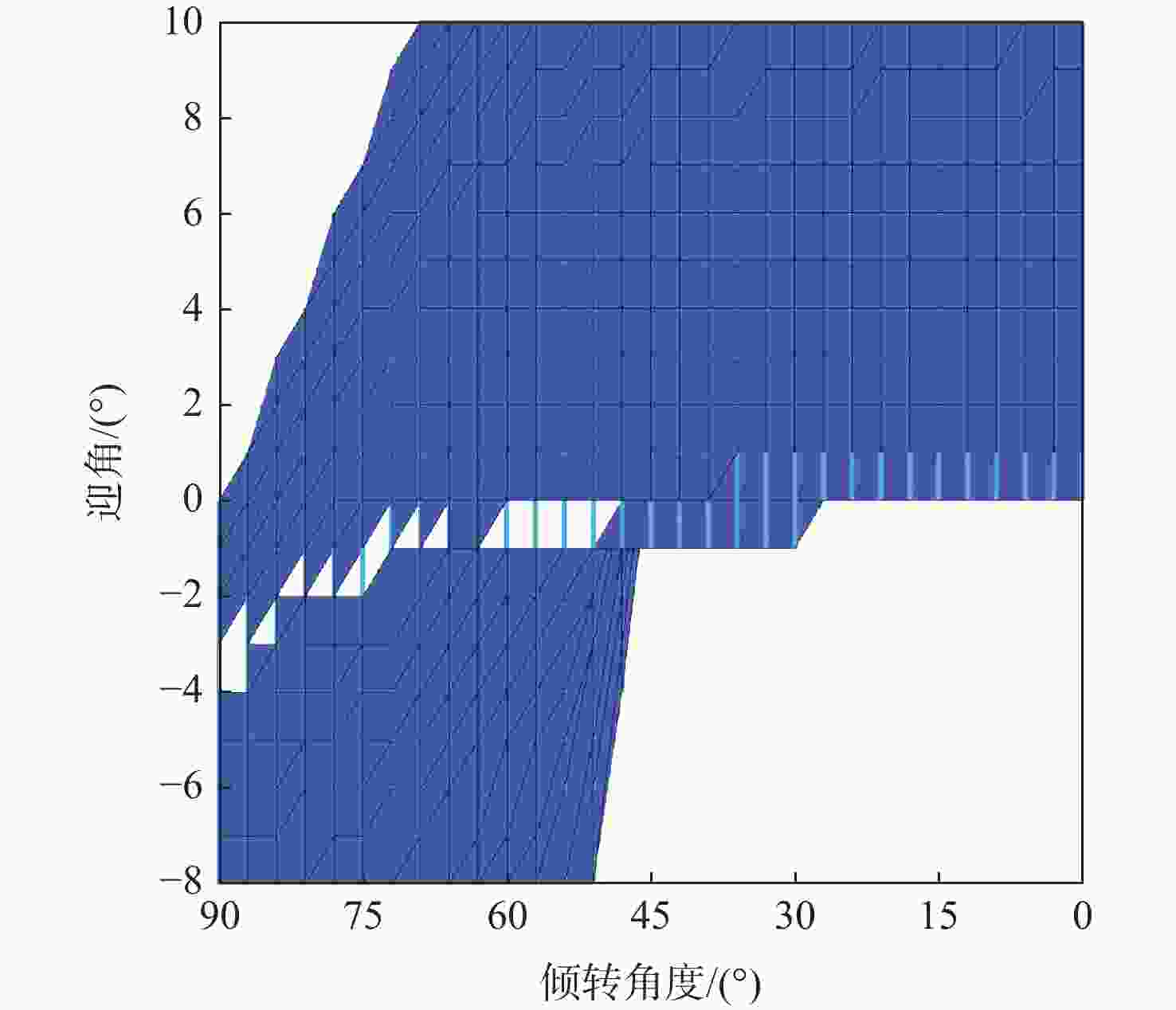
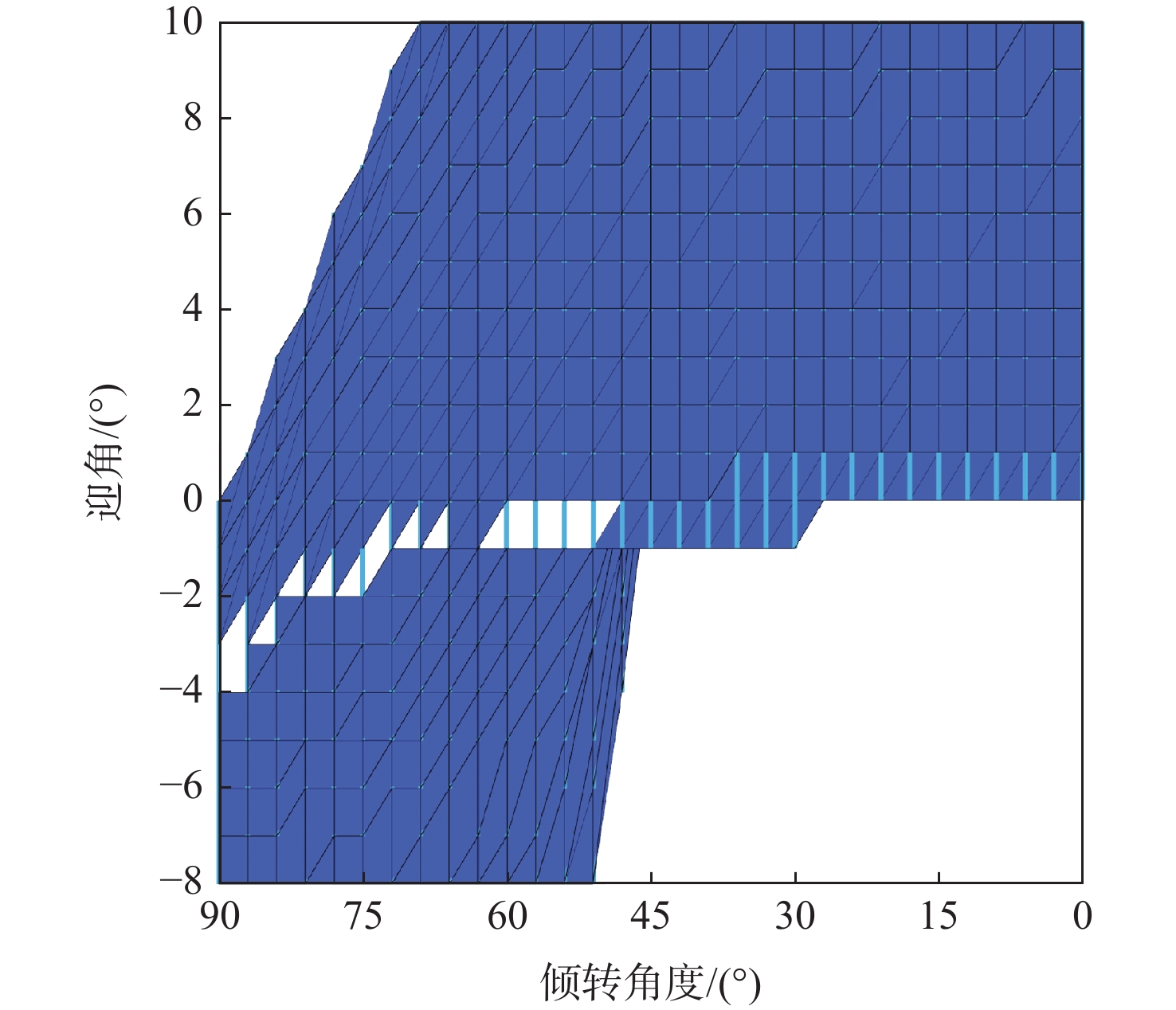
图 13 三维过渡走廊倾转角度-迎角关系图
Figure 13. Relationship between tilt angle and attack angle of 3D transition corridor
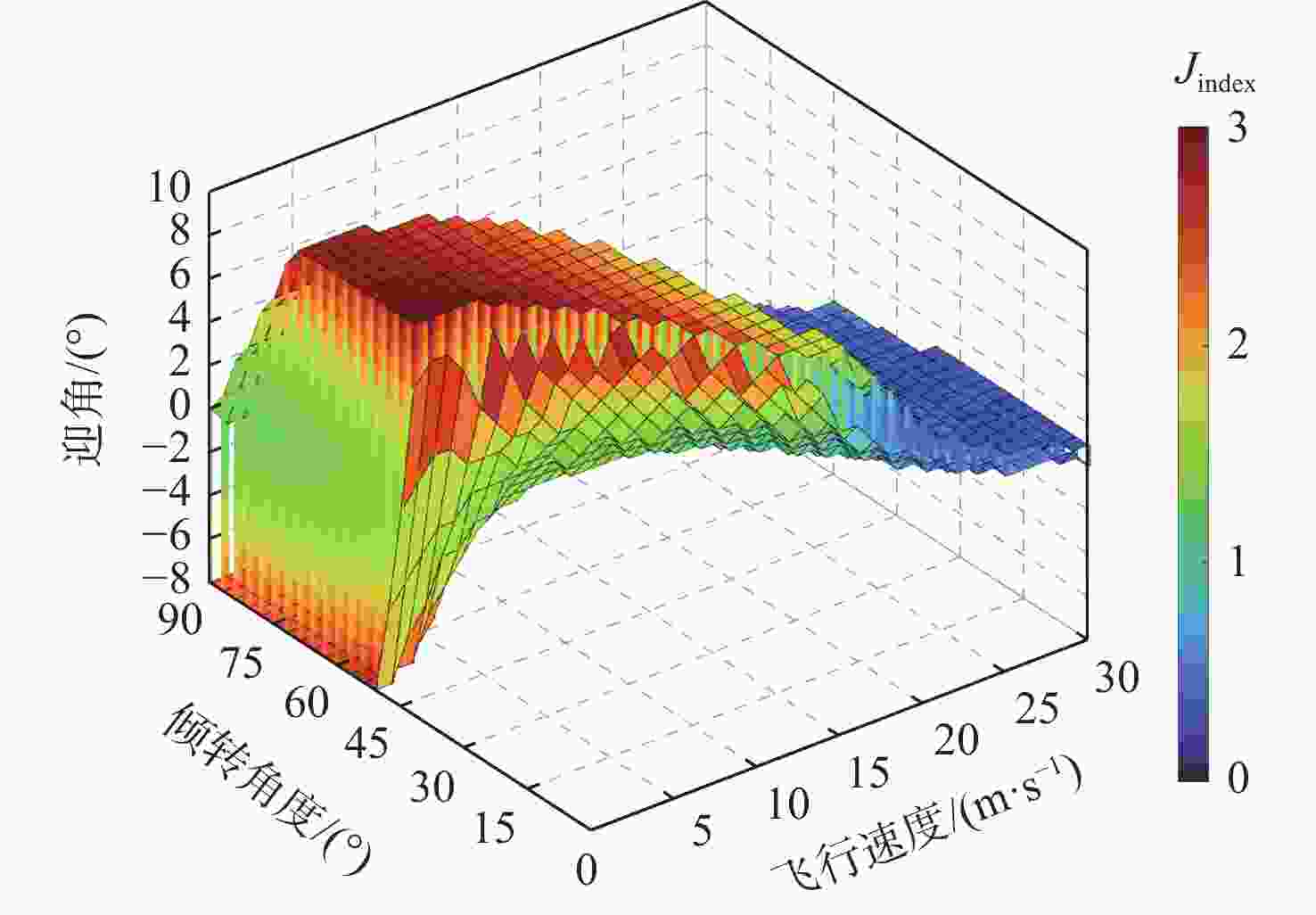
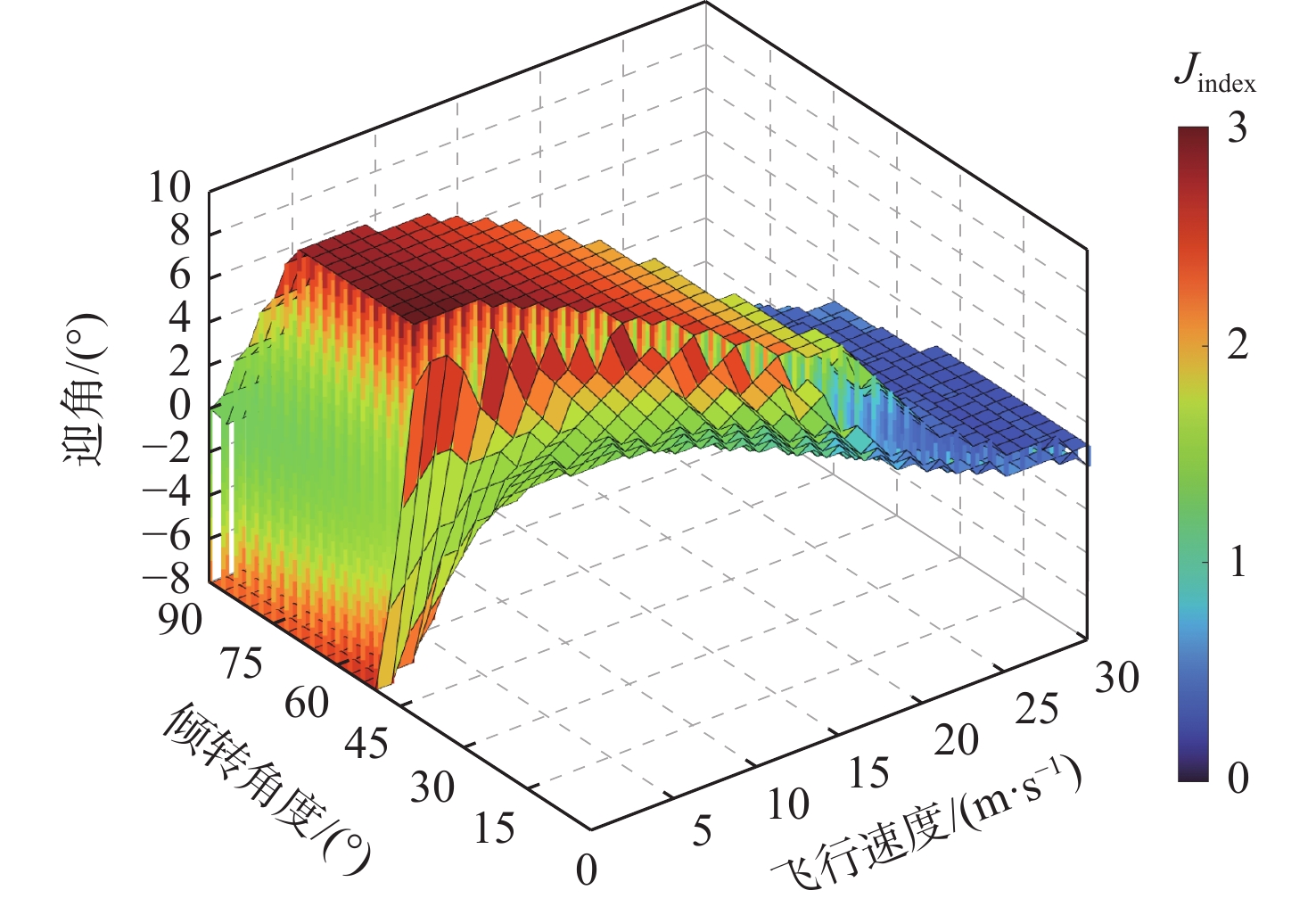
图 14 基于综合性能指标函数的三维过渡走廊
Figure 14. Three-dimensional transition corridor based on comprehensive performance index function
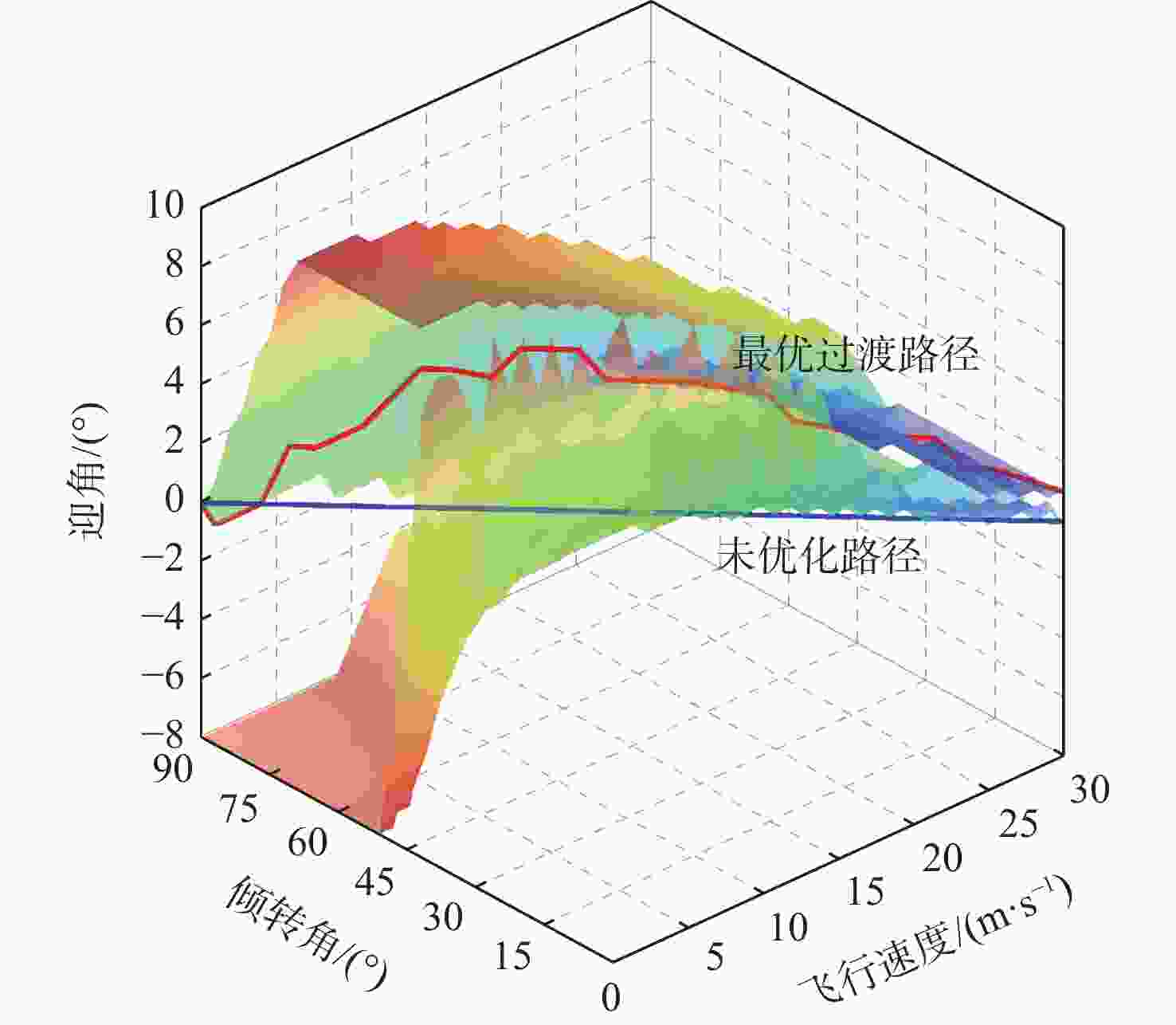
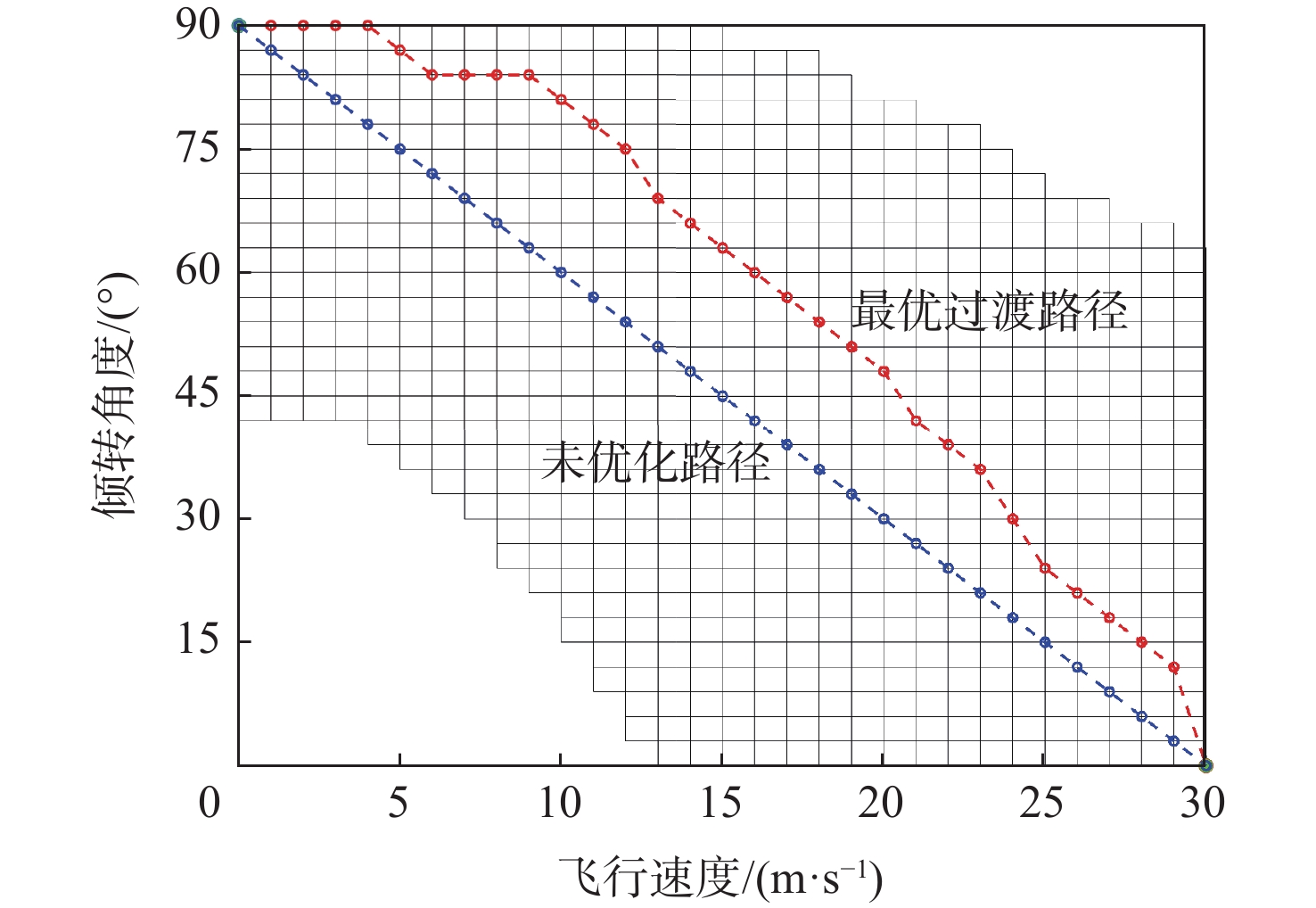
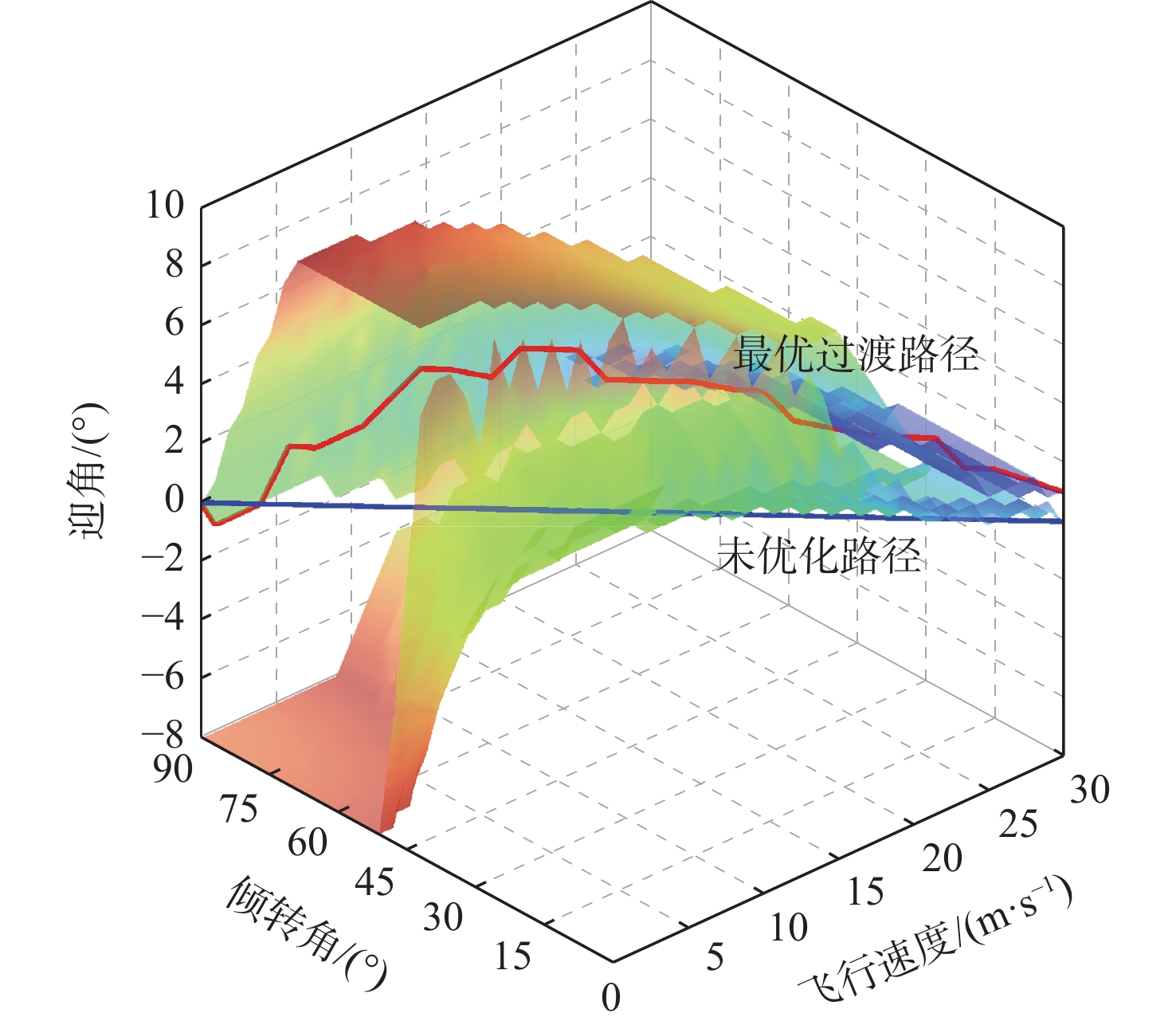
图 17 基于三维过渡走廊的最优过渡路径
Figure 17. Optimal transition path based on 3D transition corridor
-
[1] GANDOLFO D C, SALINAS L R, BRANDÃO A, et al. Stable path-following control for a quadrotor helicopter considering energy consumption[J]. IEEE Transactions on Control Systems Technology, 2017, 25(4): 1423-1430. doi: 10.1109/TCST.2016.2601288 [2] 陈金鹤, 汪正中, 田洪源. 基于最优控制理论的倾转旋翼机跃障飞行仿真[J]. 西北工业大学学报, 2020, 38(6): 1266-1274. doi: 10.3969/j.issn.1000-2758.2020.06.016CHEN J H, WANG Z Z, TIAN H Y. Hurdle-hop simulation of tilt-rotor aircraft based on optimal control theory[J]. Journal of Northwest Polytechnical University, 2020, 38(6): 1266-1274(in Chinese). doi: 10.3969/j.issn.1000-2758.2020.06.016 [3] LIU Z, HE Y Q, YANG L Y, et al. Control techniques of tilt rotor unmanned aerial vehicle systems: A review[J]. Chinese Journal of Aeronautics, 2017, 30(1): 135-148. doi: 10.1016/j.cja.2016.11.001 [4] 严旭飞, 陈仁良. 倾转旋翼机动态倾转过渡过程的操纵策略优化[J]. 航空学报, 2017, 38(7): 520865. doi: 10.7527/S1000-6893.2017.520865YAN X F, CHEN R L. Control strategy optimization of dynamic conversion procedure of tilt-rotor aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(7): 520865(in Chinese). doi: 10.7527/S1000-6893.2017.520865 [5] 鲁麟宏, 付荣, 王勇, 等. 基于矫正广义走廊的电动倾转旋翼机模态转换[J]. 航空学报, 2018, 39(8): 121900. doi: 10.7527/S1000-6893.2018.21900LU L H, FU R, WANG Y, et al. Mode conversion of electric tilt rotor aircraft based on corrected generalized corridor[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(8): 121900(in Chinese). doi: 10.7527/S1000-6893.2018.21900 [6] 郭剑东. 无人倾转旋翼机飞行控制研究[D]. 南京: 南京航空航天大学, 2013: 11-46.GUO J D. Flight control of unmanned tiltrotor aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013: 11-46(in Chinese). [7] 郑峰婴, 刘龙武, 程月华, 等. 复合式旋翼飞行器多目标控制分配策略[J]. 航空学报, 2019, 40(6): 322727.ZHENG F Y, LIU L W, CHENG Y H, et al. Multi-objective control allocation strategy of compound rotorcraft[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(6): 322727(in Chinese). [8] KANG Y, PARK B, YOO C, et al. Flight test results of automatic tilt control for small scaled tilt rotor aircraft[C]//Proceedings of the 2008 International Conference on Control, Automation and Systems. Piscataway: IEEE Press, 2008: 14-17. [9] MURAOKA K, OKADA N, KUBO D, et al. Transition flight of quad tilt wing VTOL UAV[C]//Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences. Bonn: ICAS, 2012: 23-27. [10] SATO M, MURAOKA K. Flight controller design and demonstration of quad-tilt-wing unmanned aerial vehicle[J]. Journal of Guidance, Control and Dynamics, 2015, 38(6): 1071-1082. doi: 10.2514/1.G000263 [11] ZHAO W, UNDERWOOD C. Robust transition control of a Martian coaxial tiltrotor aerobot[J]. Acta Astronautica, 2014, 99: 111-129. [12] 曹芸芸. 倾转旋翼飞行器飞行动力学数学建模方法研究[D]. 南京: 南京航空航天大学, 2012: 65-83.CAO Y Y. Research on mathematical modeling method for tilt rotor aircraft fight dynamics[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012: 65-83(in Chinese). [13] 俞志明, 陈仁良, 孔卫红. 倾转四旋翼飞行器倾转过渡走廊分析方法[J]. 北京航空航天大学学报, 2020, 46(11): 2106-2113. doi: 10.13700/j.bh.1001-5965.2019.0594YU Z M, CHEN R L, KONG W H. Analysis method for conversion corridor of quad tilt rotor aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(11): 2106-2113(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0594 [14] 曹芸芸, 陈仁良. 倾转旋翼飞行器发动机短舱倾转角度-速度包线分析[J]. 航空动力学报, 2011, 26(10): 2174-2180. doi: 10.13224/j.cnki.jasp.2011.10.011CAO Y Y, CHEN R L. Investigation on nacelle conversion envelope analysis method of tiltrotor aircraft[J]. Journal of Aerospace Power, 2011, 26(10): 2174-2180(in Chinese). doi: 10.13224/j.cnki.jasp.2011.10.011 [15] 陈天予. 倾转四旋翼飞行器气动特性分析及设计研究 [D]. 南京: 南京航空航天大学, 2018: 49-50.CHEN T Y. Researches on aerodynamic design and analyses on aerodynamic characteristics of a quad tilt rotor aircraft [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018: 49-50 (in Chinese). [16] SONG Y G, WANG H J. Design of flight control system for a small unmanned tilt rotor aircraft[J]. Chinese Journal of Aeronautics, 2009, 22(3): 250-256. doi: 10.1016/S1000-9361(08)60095-3 [17] FANG X X, LIN Q, WANG Y X, et al. Control strategy design for the transitional mode of tiltrotor UAV[C]//Proceedings of the 2012 10th IEEE International Conference on Industrial Informatics. Piscataway: IEEE Press, 2012: 25-27. [18] WANG X H, CAI L L. Mathematical modeling and control of a tilt-rotor aircraft[J]. Aerospace Science and Technology, 2015, 47: 473-492. [19] 费伦, 段海滨, 徐小斌, 等. 基于变权重变异鸽群优化的无人机空中加油自抗扰控制器设计[J]. 航空学报, 2020, 41(1): 261-270.FEI L, DUAN H B, XU X B, et al. ADRC controller design for UAV based on variable weighted mutant pigeon inspired optimization[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 261-270 (in Chinese). [20] 邹适宇, 李复名, 谢爱平, 等. 基于改进烟花算法的资源分配[J]. 航空学报, 2021, 42(12): 324716.ZOU S Y, LI F M, XIE A P, et al. Resource allocation based on improved fire works algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(12): 324716(in Chinese). [21] DUAN H B, QIAO P X. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7(1): 24-37. doi: 10.1108/IJICC-02-2014-0005 -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 543
- HTML全文浏览量: 99
- PDF下载量: 33
- 被引次数: 0
