



Guaranteed-performance formation control of swarm systems based on leader-follower strategy
-
摘要:
针对群系统编队跟踪控制问题,提出了一种切换拓扑下保性能的优化控制方法。建立了基于领航跟随结构的编队跟踪控制问题的数学描述,引入分布式性能指标描述群系统编队调节性能。利用一致性理论设计了基于领航跟随结构的编队控制协议。借助李雅普诺夫方法分析系统的闭环稳定性,给出保性能上界的数学表达形式。利用数值仿真验证了所提控制方法的有效性,群系统可在性能上界下实现编队跟踪控制,且在编队跟踪速度和消耗性能方面优于已有文献。
Abstract:Aiming at the problem of formation tracking control of swarm systems, an optimal control method with guaranteed-performance with switching topologies is proposed. Firstly, a mathematical description of formation tracking control problem based on leader-follower structure is established, and a distributed performance index is introduced to describe the formation adjustment performance of swarm systems. Then, the formation control protocol based on leader-follower structure is designed by using consensus theory. Then, the closed-loop stability of the system is analyzed by means of Lyapunov method, and the mathematical expression of the upper bound of the guaranteed-performance is given. Finally, a numerical simulation is used to verify the effectiveness of the control method, and the swarm system can realize formation tracking control under the upper bound of performance, and the formation tracking speed and performance consumption are better than the existing literature.
-
Key words:
- swarm systems /
- leader-follower /
- formation tracking /
- guaranteed-performance /
- switching topology
-
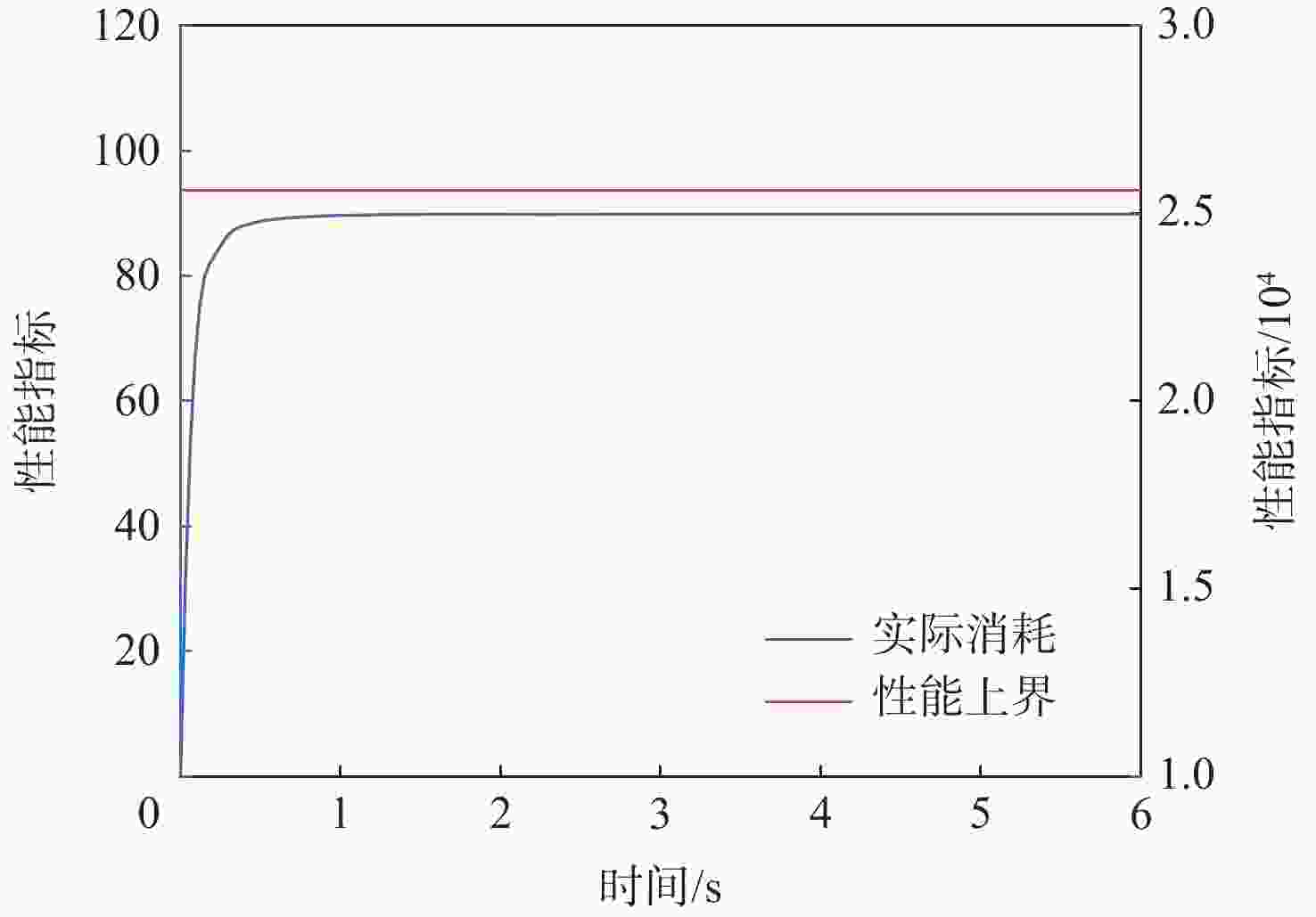
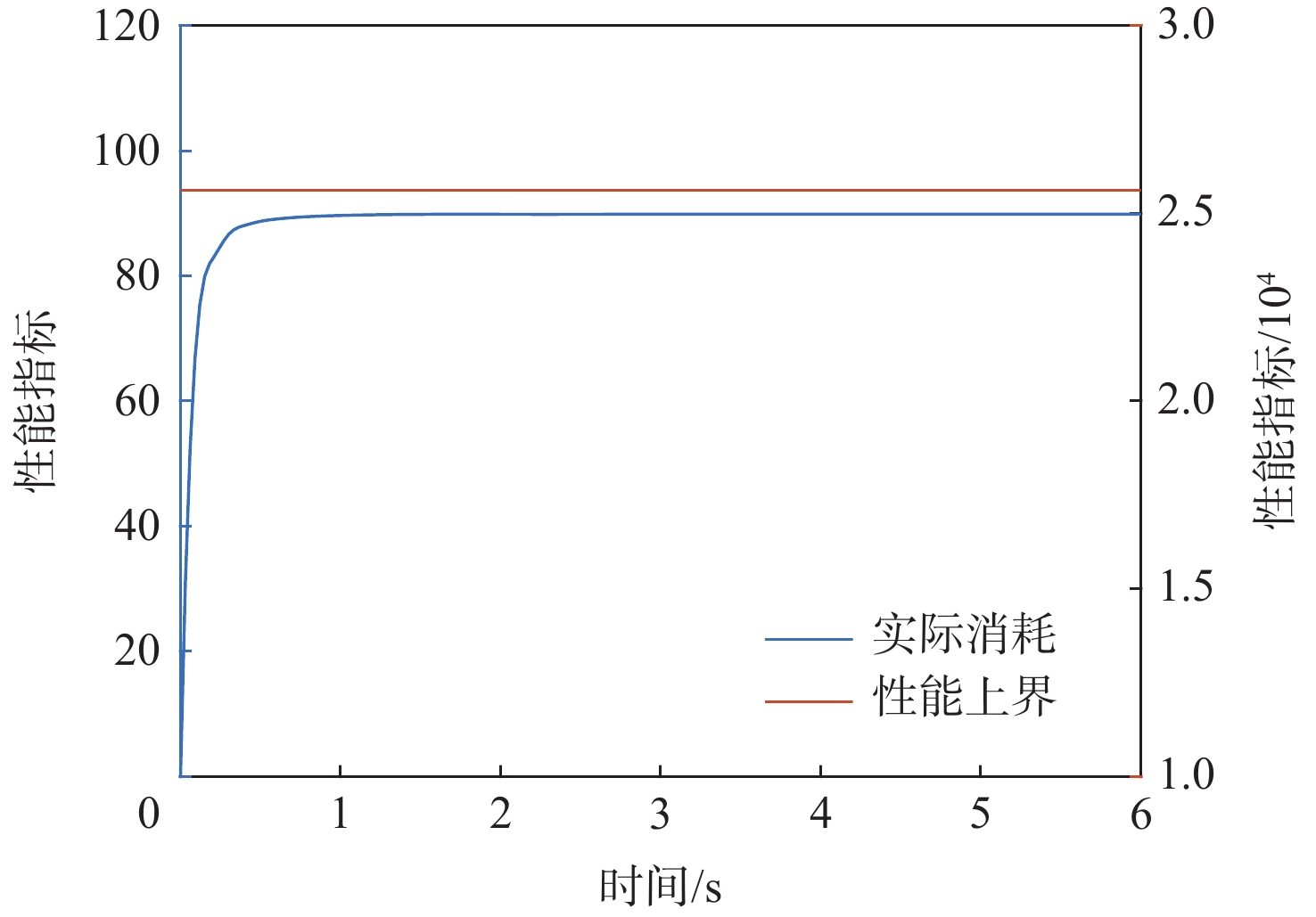
图 7 实际消耗性能指标与性能上界
Figure 7. Actual consumed performance index and upper bound of guaranteed performance
表 1 编队跟踪误差收敛时间
Table 1. Convergence time of formation tracking errors
$ \alpha $ 收敛时间/s 0.2 4.8 0.4 4.7 0.6 4.6 0.8 4.2 1.0 4.1  下载: 导出CSV
下载: 导出CSV
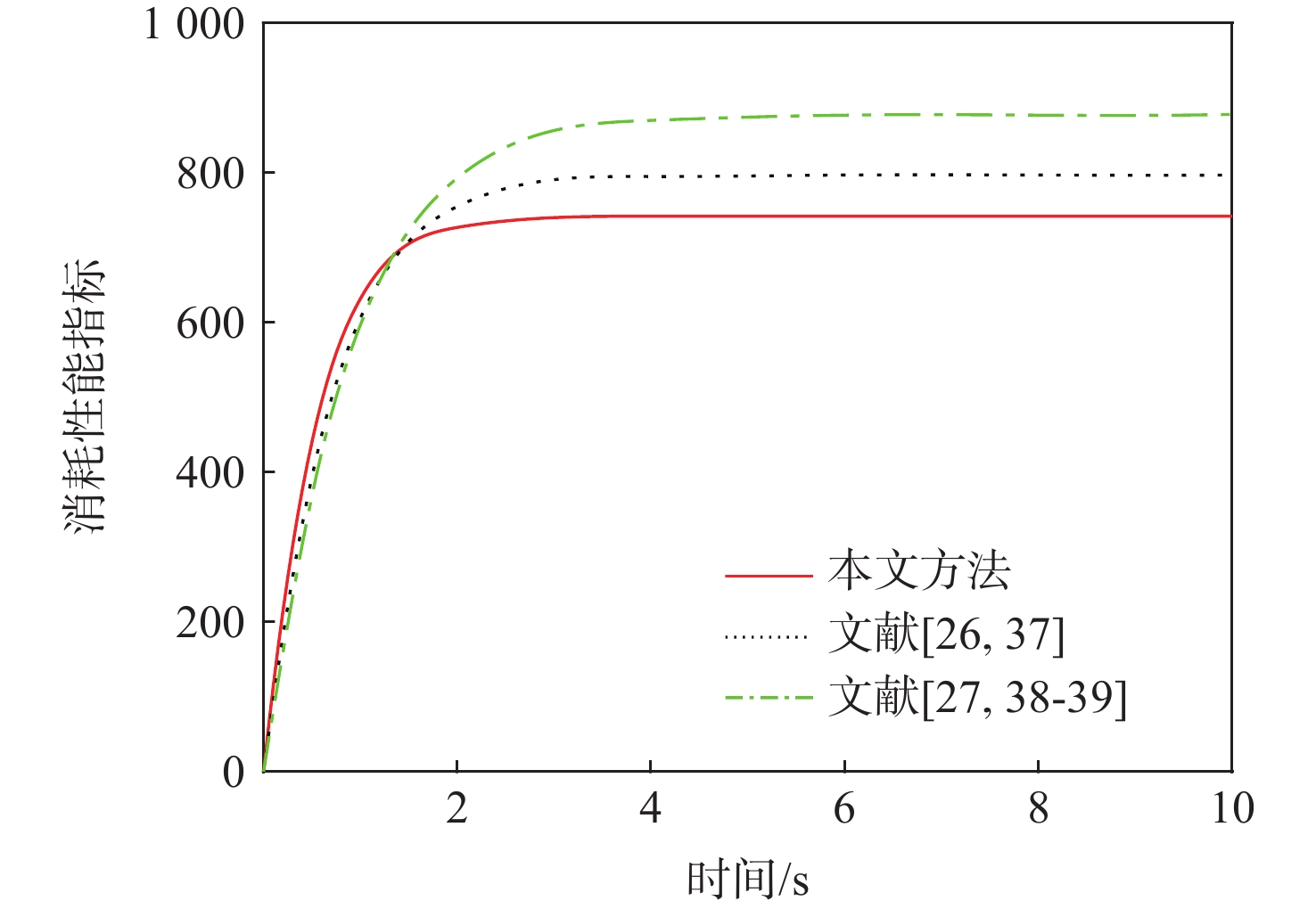
表 2 不同方法下编队跟踪误差收敛时间、消耗性能指标和控制参数取值
Table 2. Convergence time of formation tracking errors, cost of performance and values of control parameters in different methods
方法 收敛时间/s 消耗性能指标 控制参数取值 本文方法 9.6 742.1088 $ \begin{gathered} {{\boldsymbol{K}}_1} = \left[ {\begin{array}{*{20}{r}} { - 2.938\;9}&{ - 2.979\;9}&{ - 0.791\;3}&{0.074\;8}&{0.863\;8}&{0.389\;0} \\ {0.985\;1}&{ - 0.007\;6}&{ - 2.891\;5}&{ - 2.987\;5}&{0.462\;8}&{0.221\;8} \\ { - 0.324\;9}&{ - 0.119\;7}&{0.009\;4}&{ - 0.179\;9}&{ - 2.083\;4}&{ - 3.032\;6} \end{array}} \right] \\ {{\boldsymbol{K}}_2} = {{\boldsymbol{I}}_3} \otimes \left[ {\begin{array}{*{20}{c}} {30.011\;2}&{29.798\;4} \end{array}} \right] \\ \end{gathered} $ 文献[26,37] 12.1 797.3386 $ {{\boldsymbol{K}}}_{1}={{\boldsymbol{I}}}_{3}\otimes \left[\begin{array}{cc}-8.560\;4& -11.757\;4\end{array}\right],{{\boldsymbol{K}}}_{2}={{\boldsymbol{I}}}_{3}\otimes \left[\begin{array}{cc}8.560\;4& 11.757\;4\end{array}\right] $ 文献[27,38-39] 15.3 877.5561 $ {{\boldsymbol{K}}}_{1}={{\boldsymbol{I}}}_{3}\otimes \left[\begin{array}{cc}-5.364\;8& -9.292\;1\end{array}\right],{{\boldsymbol{K}}}_{2}={{\boldsymbol{I}}}_{3}\otimes \left[\begin{array}{cc}5.364\;8& 9.292\;1\end{array}\right] $ 文献[28] 11.9 $ {{\boldsymbol{K}}}_{1}={{\boldsymbol{I}}}_{3}\otimes \left[\begin{array}{cc}-3.170\;5& -4.354\;6\end{array}\right],{{\boldsymbol{K}}}_{2}={{\boldsymbol{I}}}_{3}\otimes \left[\begin{array}{cc}3.170\;5& 4.354\;6\end{array}\right] $
下载: 导出CSV
-
[1] 王祥科, 陈浩, 赵述龙. 大规模固定翼无人机集群编队控制方法[J]. 控制与决策, 2021, 36(9): 2063-2073.WANG X K, CHEN H, ZHAO S L. Formation control of large-scale fixed-wing unmanned aerial vehicle swarms[J]. Control and Decision, 2021, 36(9): 2063-2073(in Chinese). [2] XIE Y, HAN L, DONG X, et al. Bio-inspired adaptive formation tracking control for swarm systems with application to UAV swarm systems[J]. Neurocomputing, 2021, 453: 272-285. doi: 10.1016/j.neucom.2021.05.015 [3] 王晶, 顾维博, 窦立亚. 基于 Leader-Follower 的多无人机编队轨迹跟踪设计[J]. 航空学报, 2020, 41(S1): 723758.WANG J, GU W B, DOU L Y. Leader-follower formaion control of multiple UAVs with trajectory tracking design[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723758(in Chinese). [4] 吴宇, 梁天骄. 基于改进一致性算法的无人机编队控制[J]. 航空学报, 2020, 41(9): 323848. doi: 10.7527/S1000-6893.2020.23848WU Y, LIANG T J. Improved consensus-based algorithm for unmanned aerial vehicle formation control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(9): 323848(in Chinese). doi: 10.7527/S1000-6893.2020.23848 [5] 田磊, 董希旺, 赵启伦, 等. 异构集群系统分布式自适应输出时变编队跟踪控制[J]. 自动化学报, 2021, 47(10): 2386-2401.TIAN L, DONG X W, ZHAO Q L, et al. Distributed adaptive time-varying output formation tracking for heterogeneous swarm systems[J]. Acta Automatica Sinica, 2021, 47(10): 2386-2401(in Chinese). [6] 费思远, 鲜斌, 王岭. 基于群集行为的分布式多无人机编队动态避障控制[J]. 控制理论与应用, 2022, 39(1): 1-11. doi: 10.7641/CTA.2021.10082FEI S Y, XIAN B, WANG L. Distributed formation control for multiple unmanned aerial vehicles with dynamic obstacle avoidance based on the flocking behavior[J]. Control Theory & Applications, 2022, 39(1): 1-11(in Chinese). doi: 10.7641/CTA.2021.10082 [7] 郭洪振, 陈谋. 基于预设性能的四旋翼无人机编队安全控制[J]. 航空学报, 2021, 42(8): 525789. doi: 10.7527/S1000-6893.2021.25789GUO H Z, CHEN M. Safety formation control of quadrotor UAVs based on prescribed performance[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525789(in Chinese). doi: 10.7527/S1000-6893.2021.25789 [8] 杨慧欣. 基于循环追踪控制的卫星编队构形调整控制律设计[J]. 航空学报, 2020, 41(S2): 724311.YANG H X. Cyclic pursuit control method design for spacecraft formation configuration adjustment[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724311(in Chinese). [9] 宗群, 谷友博, 张秀云, 等. 角速度约束卫星编队控制与虚拟演示验证[J]. 哈尔滨工业大学学报, 2021, 53(3): 193-200. doi: 10.11918/202007131ZONG Q, GU Y B, ZHANG X Y. Satellite formation control and virtual demonstration verification under angular velocity constraint[J]. Journal of Harbin Institute of Technology, 2021, 53(3): 193-200(in Chinese). doi: 10.11918/202007131 [10] 王常顺, 王丹, 彭周华. 单路径导引的车式移动机器人协同编队控制[J]. 控制理论与应用, 2021, 38(7): 1124-1132. doi: 10.7641/CTA.2021.00709WANG C S, WANG D, PENG Z H. Coordinated formation control of car-like mobile robots guided by parameterized single path[J]. Control Theory & Applications, 2021, 38(7): 1124-1132(in Chinese). doi: 10.7641/CTA.2021.00709 [11] 谭瑶, 梅杰. 利用方位角信息的移动机器人编队控制[J]. 控制理论与应用, 2021, 38(7): 1043-1050. doi: 10.7641/CTA.2021.00718TAN Y, MEI J. Formation control of mobile robots using bearing-only measurements[J]. Control Theory & Applications, 2021, 38(7): 1043-1050(in Chinese). doi: 10.7641/CTA.2021.00718 [12] WANG J, XIN M. Integrated optimal formation control of multiple unmanned aerial vehicles[J]. IEEE Transactions on Control Systems Technology, 2012, 21(5): 1731-1744. [13] DYDEK Z T, ANNASWAMY A M, LAVRETSKY E. Adaptive configuration control of multiple UAVs[J]. Control Engineering Practice, 2013, 21(8): 1043-1052. doi: 10.1016/j.conengprac.2013.03.010 [14] BAYEZIT I, FIDAN B. Distributed cohesive motion control of flight vehicle formations[J]. IEEE Transactions on Industrial Electronics, 2012, 60(12): 5763-5772. [15] REN W. Consensus strategies for cooperative control of vehicle formations[J]. IET Control Theory & Applications, 2007, 1(2): 505-512. [16] WANG X. Multi-agent time-varying formation control based on consistency[C]//Journal of Physics: Conference Series. Bristol: IOP Publishing, 2021, 1865(2): 022031. [17] YU J L, DONG X W, LI Q D, et al. Distributed adaptive cooperative time-varying formation tracking guidance for multiple aerial vehicles system[J]. Aerospace Science and Technology, 2021, 117: 106925. doi: 10.1016/j.ast.2021.106925 [18] LIU X, XIE Y, LI F, et al. Time-varying formation control of singular multi-agent systems with multiple leaders[C]//2020 IEEE 16th International Conference on Control & Automation (ICCA). Piscataway: IEEE Press, 2020: 193-198. [19] 石晓航, 张庆杰, 吕俊伟. 基于自由权矩阵的时变时延线性群系统编队控制[J]. 航空学报, 2018, 39(3): 321628.SHI X H, ZHANG Q J, LYU J W. Formation control for linear swarm systems with time-varying delays based on free-weighting matrices[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(3): 321628(in Chinese). [20] DONG X, YU B, SHI Z, et al. Time-varying formation control for unmanned aerial vehicles: Theories and applications[J]. IEEE Transactions on Control Systems Technology, 2014, 23(1): 340-348. [21] NIAN X H, SU S J, PAN H. Consensus tracking protocol and formation control of multi-agent systems with switching topology[J]. Journal of Central South University of Technology, 2011, 18(4): 1178-1183. doi: 10.1007/s11771-011-0820-5 [22] DONG X, SHI Z, LU G, et al. Time-varying formation control for high-order linear swarm systems with switching interaction topologies[J]. IET Control Theory & Applications, 2014, 8(18): 2162-2170. [23] 石晓航, 张庆杰, 吕俊伟. 复杂通信条件下的线性群系统编队控制方法[J]. 信息与控制, 2018, 47(3): 297-305.SHI X H, ZHANG Q J, LYU J W. Formation control for linear swarm systems with complex communication conditions[J]. Information and Control, 2018, 47(3): 297-305(in Chinese). [24] 刘流, 梁晓龙, 张佳强, 等. 切换通信拓扑条件下的无人机集群构型变换控制[J]. 兵工学报, 2019, 40(5): 996-1002. doi: 10.3969/j.issn.1000-1093.2019.05.012LIU L, LIANG X L, ZHANG J Q, et al. UAV swarm formation reconfiguration control with switching interaction topologies[J]. Control and Decision, 2019, 40(5): 996-1002(in Chinese). doi: 10.3969/j.issn.1000-1093.2019.05.012 [25] DONG X, ZHOU Y, REN Z, et al. Time-varying formation control for unmanned aerial vehicles with switching interaction topologies[J]. Control Engineering Practice, 2016, 46: 26-36. doi: 10.1016/j.conengprac.2015.10.001 [26] DONG X W, LI Y F, LU C, et al. Time-varying formation tracking for UAV swarm systems with switching directed topologies[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 30(12): 3674-3685. [27] DONG X, ZHOU Y, REN Z, et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying[J]. IEEE Transactions on Industrial Electronics, 2016, 64(6): 5014-5024. [28] 周绍磊, 祁亚辉, 张雷, 等. 切换拓扑下无人机集群系统时变编队控制[J]. 航空学报, 2017, 38(4): 320452.ZHOU S L, QI Y H, ZHANG L, et al. Time-varying formation control of UAV swarm systems with switching topologies[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(4): 320452(in Chinese). [29] YU C B, WANG Y Q, SHAO J L. Optimization of formation for multi-agent systems based on LQR[J]. Frontiers of Information Technology & Electronic Engineering, 2016, 17(2): 96-109. [30] HU J Y, LANZON A. Cooperative adaptive time-varying formation tracking for multi-agent systems with LQR performance index and switching directed topologies[C]//2018 IEEE Conference on Decision and Control (CDC). Piscataway: IEEE Press, 2018: 5102-5107. [31] 石晓航, 张庆杰, 吕俊伟. 一类复杂通信条件下高阶线性群系统编队控制[J]. 北京航空航天大学学报, 2020, 46(4): 769-780.SHI X H, ZHANG Q J, LYU J W. Formation control for high-order linear swarm systems with complex communication conditions[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 769-780(in Chinese). [32] XI J, WANG C, LIU H, et al. Completely distributed guaranteed-performance consensualization for high-order multiagent systems with switching topologies[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 49(7): 1338-1348. [33] 王未, 王莉, 黄迟. 脉冲控制下多智能体系统的保性能双向编队控制[J]. 控制与决策, 2021, 36(1): 180-186.WANG W, WANG L, HUANG C. Guaranteed cost bipartite formation problem of multi-agent systems with impulse control[J]. Control and Decision, 2021, 36(1): 180-186(in Chinese). [34] 权婉珍, 罗哲, 杨小冈, 等. 间歇通信条件下多无人机保性能编队追踪控制[J]. 系统工程与电子技术, 2021, 43(11): 3288-3294. doi: 10.12305/j.issn.1001-506X.2021.11.29QUAN W Z, LUO Z, YANG X G, et al. Guaranteed-performance formation tracking control of UAVs with intermittent communication[J]. Systems Engineering and Electronic, 2021, 43(11): 3288-3294(in Chinese). doi: 10.12305/j.issn.1001-506X.2021.11.29 [35] HORN R A, JOHNSON C R. Matrix analysis[M]. Cambridge : Cambridge University Press, 2012: 166-168. [36] 郑大钟. 线性系统理论[M]. 北京: 清华大学出版社, 2002: 153-154.ZHENG D Z. Linear system theory[M]. Beijing: Tsinghua University Press, 2002: 153-154(in Chinese). [37] XIANG J, LI Y, DONG X, et al. Time-varying formation tracking for second-order multi-agent systems with switching directed topologies[C]//2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC). Piscataway: IEEE Press, 2017: 252-257. [38] DONG X, XIANG J, HAN L, et al. Distributed time-varying formation tracking analysis and design for second-order multi-agent systems[J]. Journal of Intelligent & Robotic Systems, 2017, 86(2): 277-289. [39] DONG X, HAN L, LI Q, et al. Time-varying formation tracking for second-order multi-agent systems with one leader[C]//2015 Chinese Automation Congress (CAC). Piscataway: IEEE Press, 2015: 1046-1051. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 271
- HTML全文浏览量: 56
- PDF下载量: 24
- 被引次数: 0
