



-
摘要:
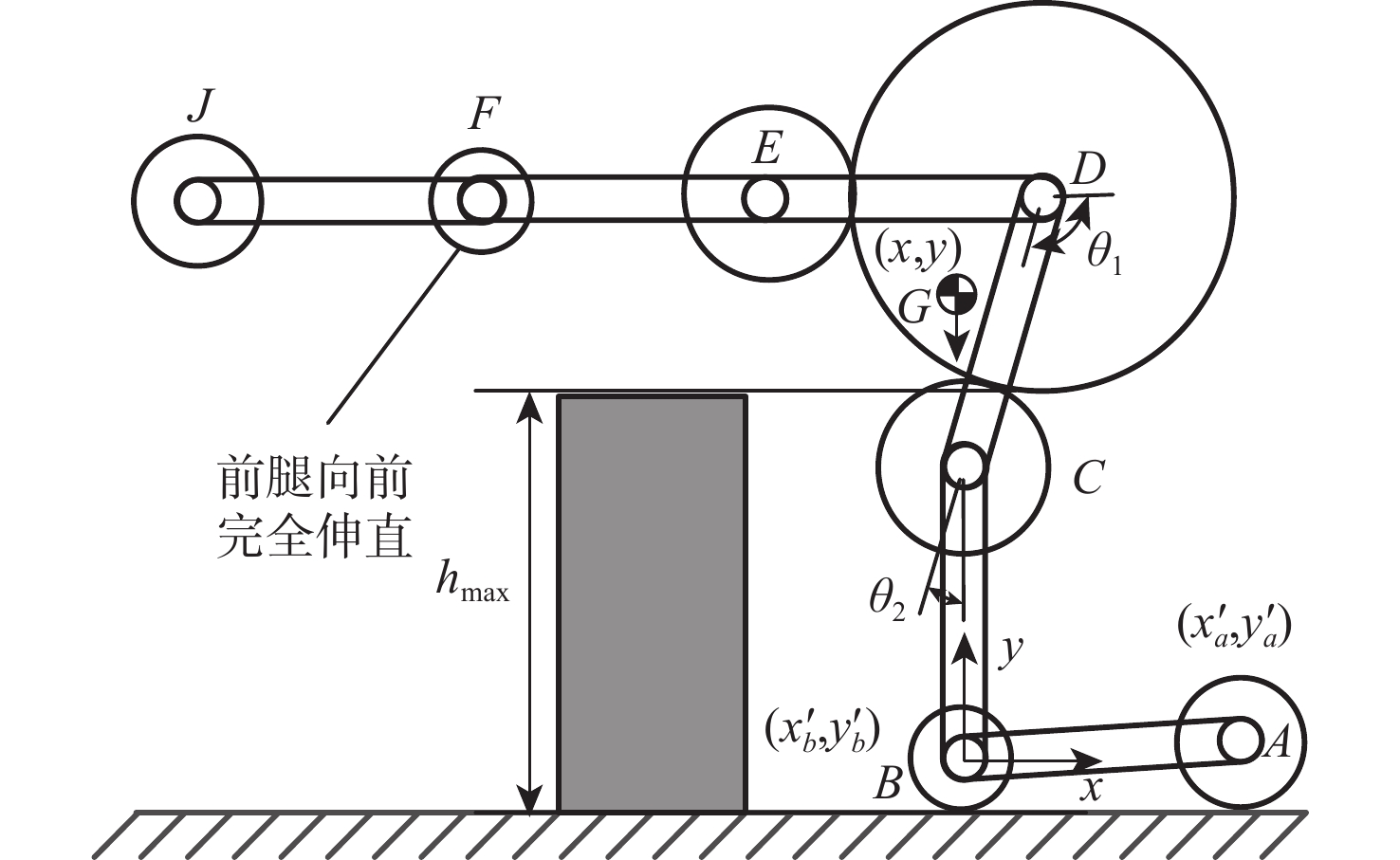
针对现有四足机器人越障能力不足及越障不平稳的问题,提出一种通过轮系传动来实现高越障和质心平稳的新型轮腿式机器人。该机器人髋关节部位采用轮系构型,扩大机器人腿部运动范围,克服越障高度与机器人腿部长度之间的矛盾,同时通过合理的步态规划保证机器人质心的运动轨迹平稳。基于Denavit-Hartenbery (D-H)法建立机器人运动学模型,从而构建机器人腿部末端与越障高度的映射关系,根据此映射关系得出最佳越障高度为自身腿长高度的66.4%,基于重心地面投影点(CoG)静态稳定性判据对机器人进行越障步态及行走静步态规划,并通过仿真实验验证此步态下质心的稳定。搭建实验样机,进行机器人越障实验,进一步验证所提轮腿机器人越障高度高及越障过程质心平稳的有效性和可行性。
Abstract:To address the problems of the existing quadruped robot's insufficient obstacle surmounting ability and unstable obstacle surmounting, a new wheel-legged robot was proposed to achieve high obstacle surmounting and stable centroid through wheel-train transmission. Adopting the wheel configuration, the hip joint of the robot expands the range of motion of the robot leg, overcomes the contradiction between the height of obstacle crossing and the length of the robot leg, and ensures the smooth motion trajectory of the robot centroid through reasonable gait planning. A kinematics model of the robot was established based on Denavit-Hartenbery (D-H) method, and the mapping relationship between the end of the robot leg and the height of obstacle crossing was constructed. According to the mapping relationship, the optimal height of obstacle crossing was 66.4% of the length of the robot leg. The static stability criterionv center of gravity (CoG) is used to plan the obstacle crossing gait and static walking gait of the robot, and the stability of the center of mass under this gait is verified by simulation experiments. An experimental prototype was built and the obstacle crossing experiment was carried out, which further verified the effectiveness and feasibility of the high obstacle crossing height and stable centroid of the proposed wheel-legged robot.
-
Key words:
- wheel-legged robot /
- obstacle crossing /
- kinematic analysis /
- gait analysis /
- hip joint structure
-
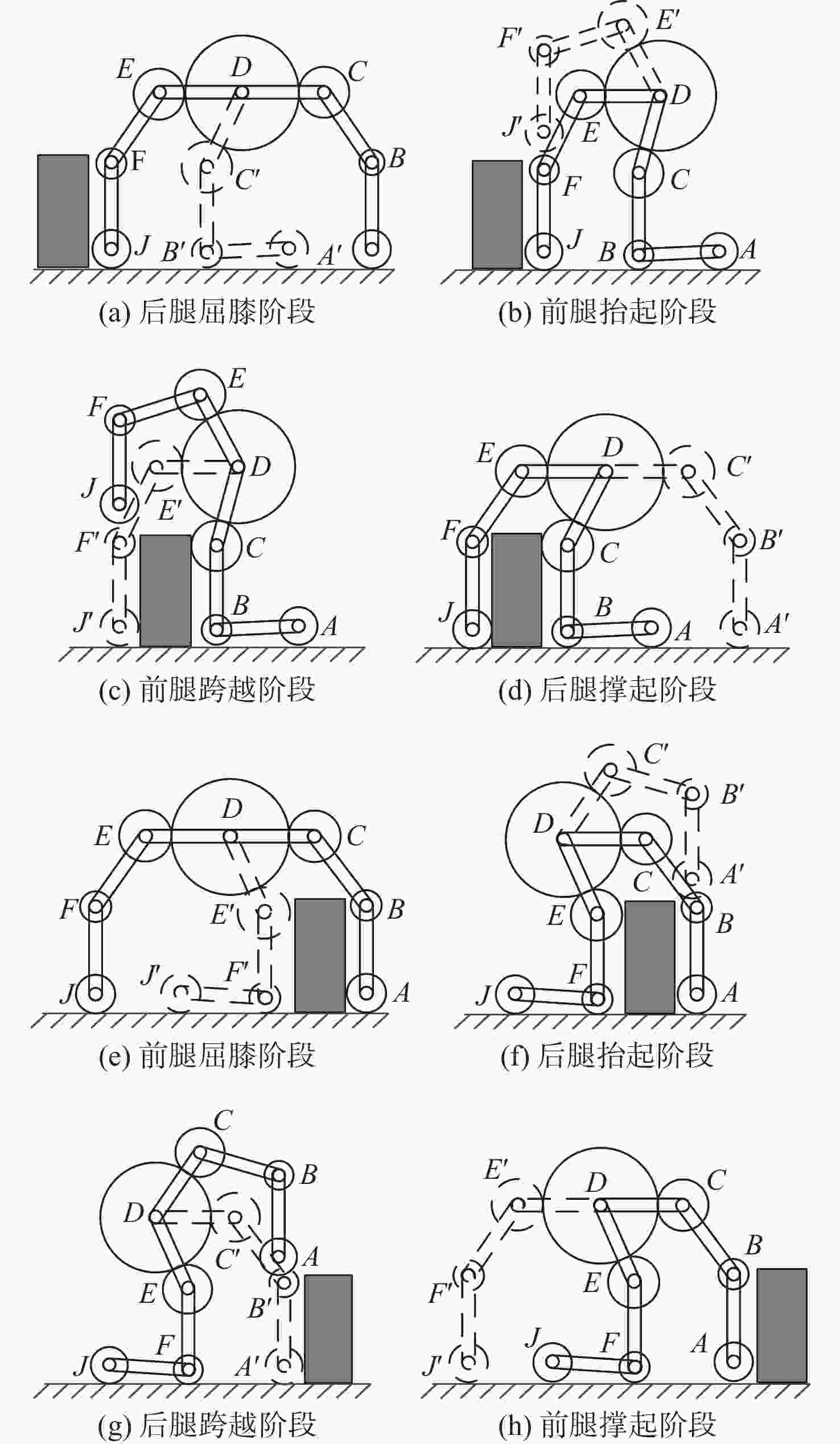
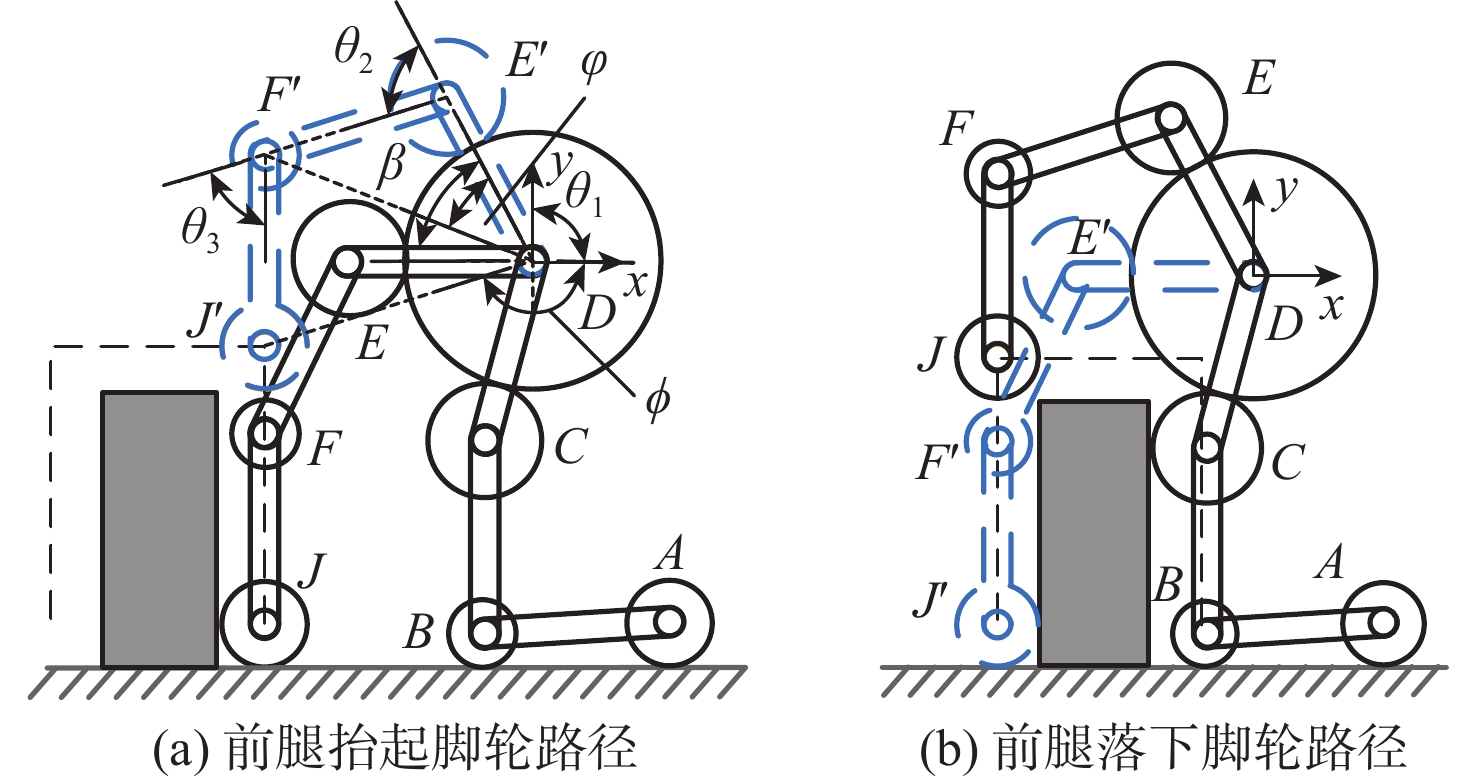
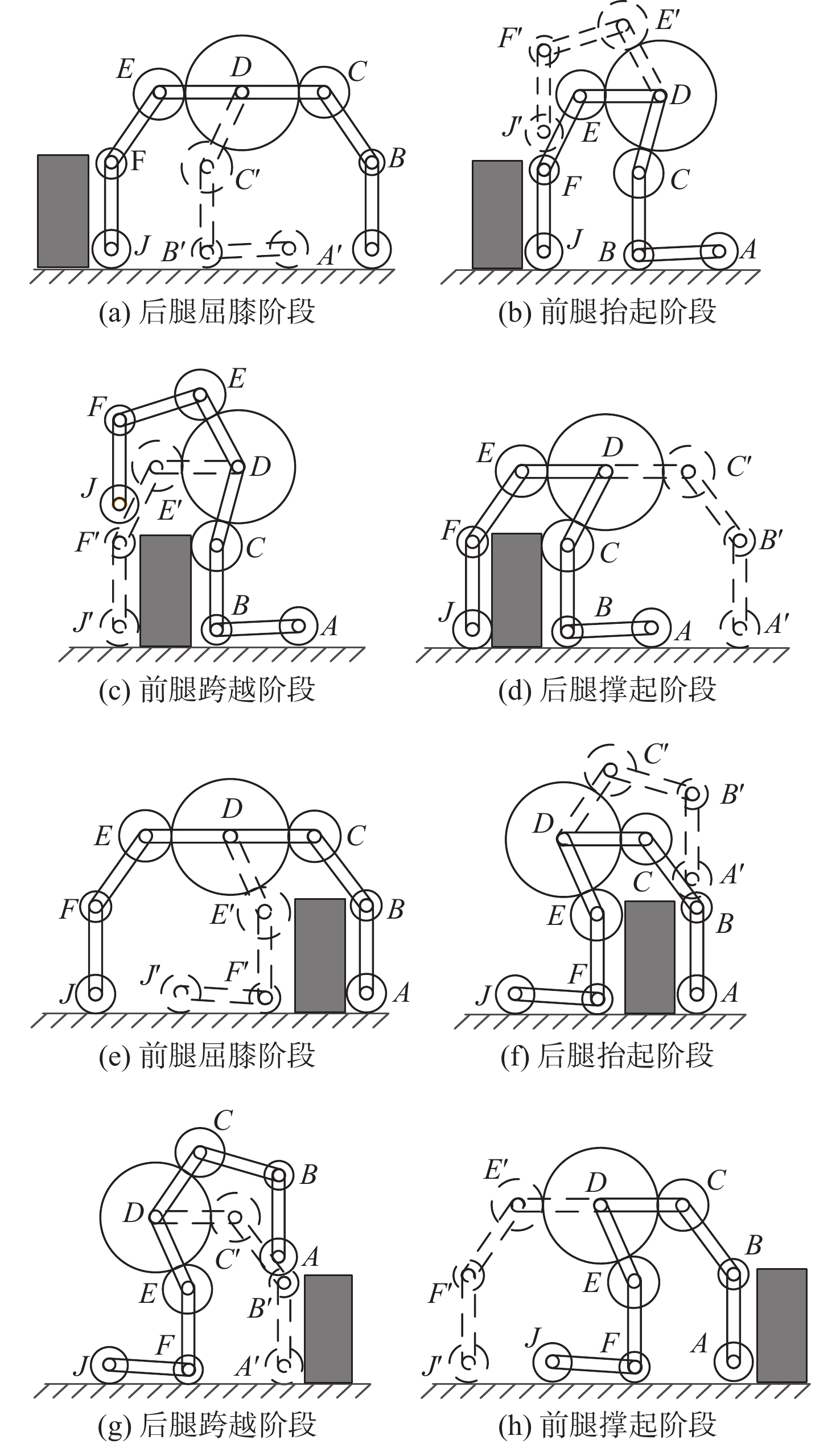
图 7 轮腿机构运动周期示意图
Figure 7. Schematic diagram of movement period of wheel-legged mechanism
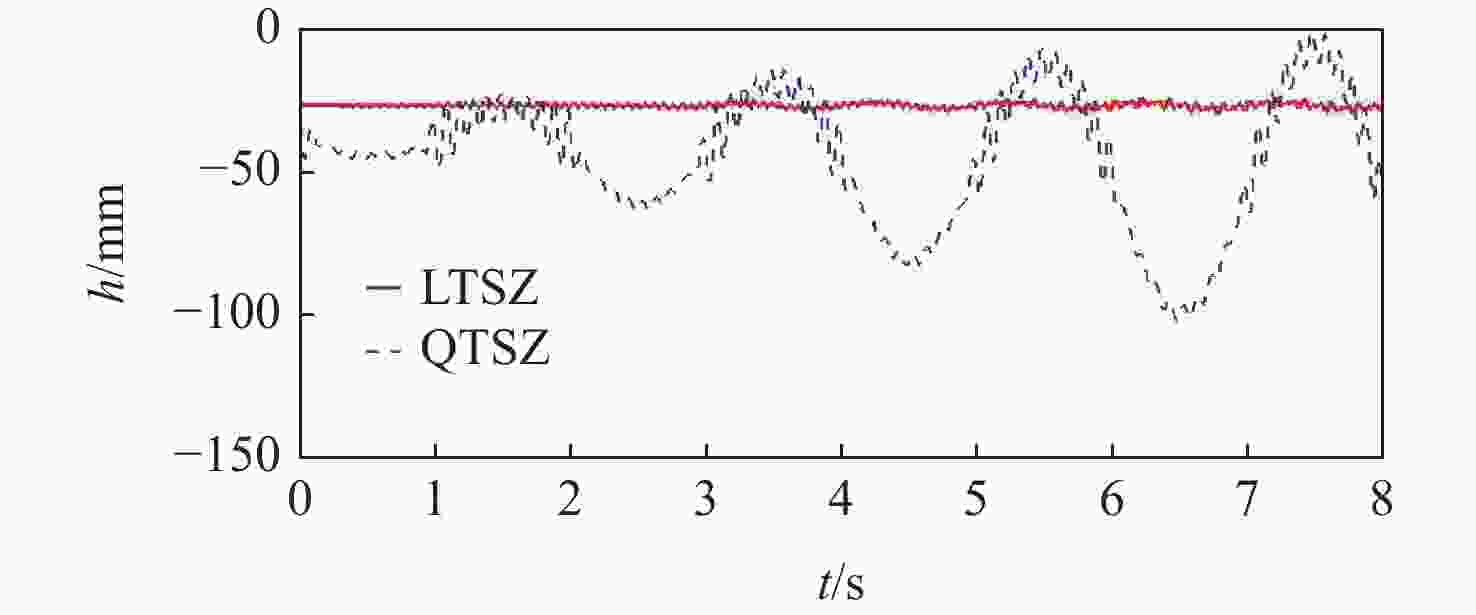
图 10 轮腿机器人与其他四足机器人质心轨迹
Figure 10. Trajectories of wheel-legged quadruped robot and other quadruped robots
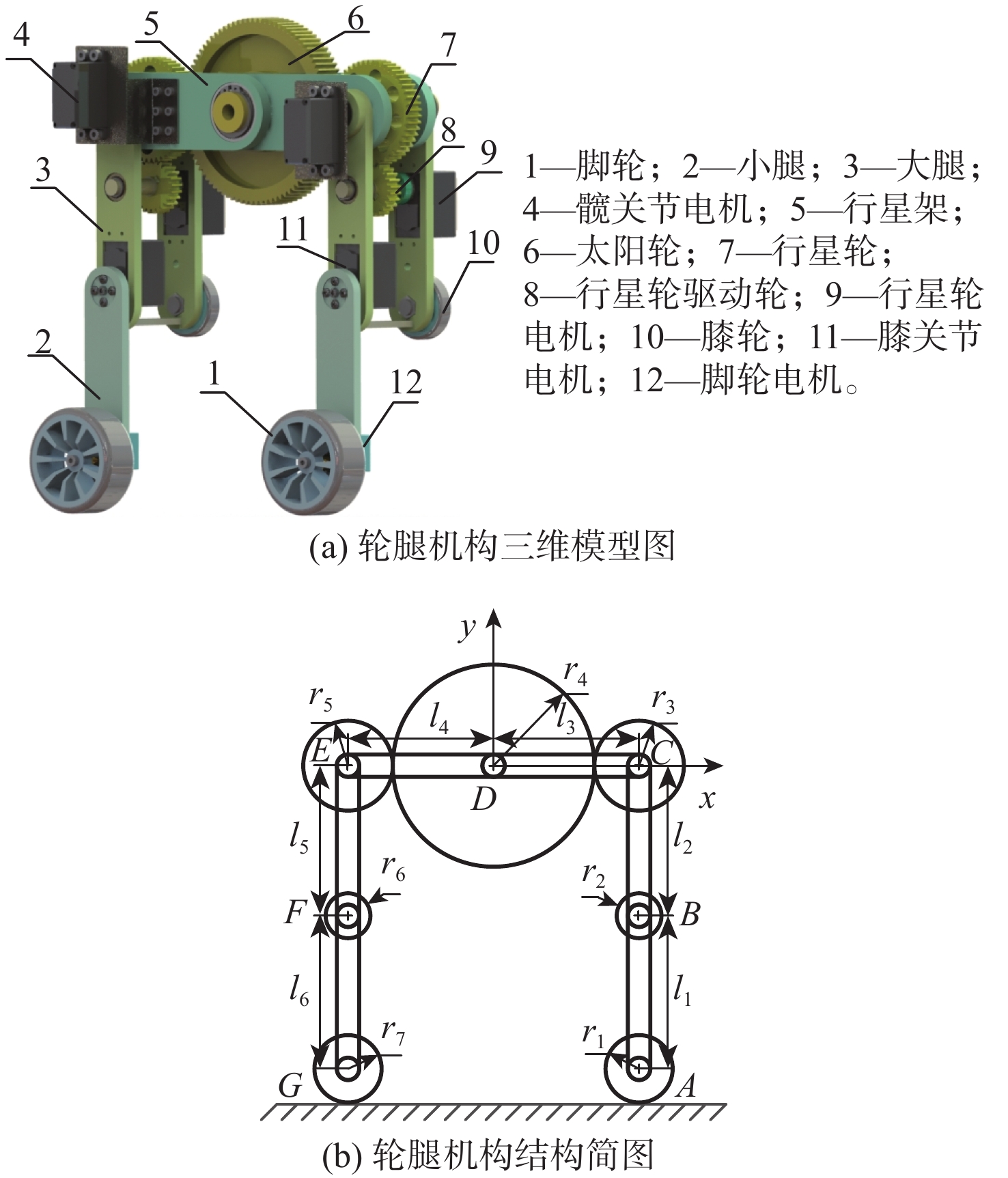
表 1 轮腿机器人各部分参数
Table 1. Parameters of each part of wheel-legged robot
部位 长度/mm 半径/mm 质量/g 后脚轮 32.5 58 后小腿 100 25 后膝轮 20 60 后大腿 110 180 后行星轮 31.25 130 后行星架 88 137 太阳轮 57.5 210 前行星架 88 137 前行星轮 31.25 130 前大腿 110 180 前膝轮 20 60 前小腿 100 25 前脚轮 32.5 58  下载: 导出CSV
下载: 导出CSV
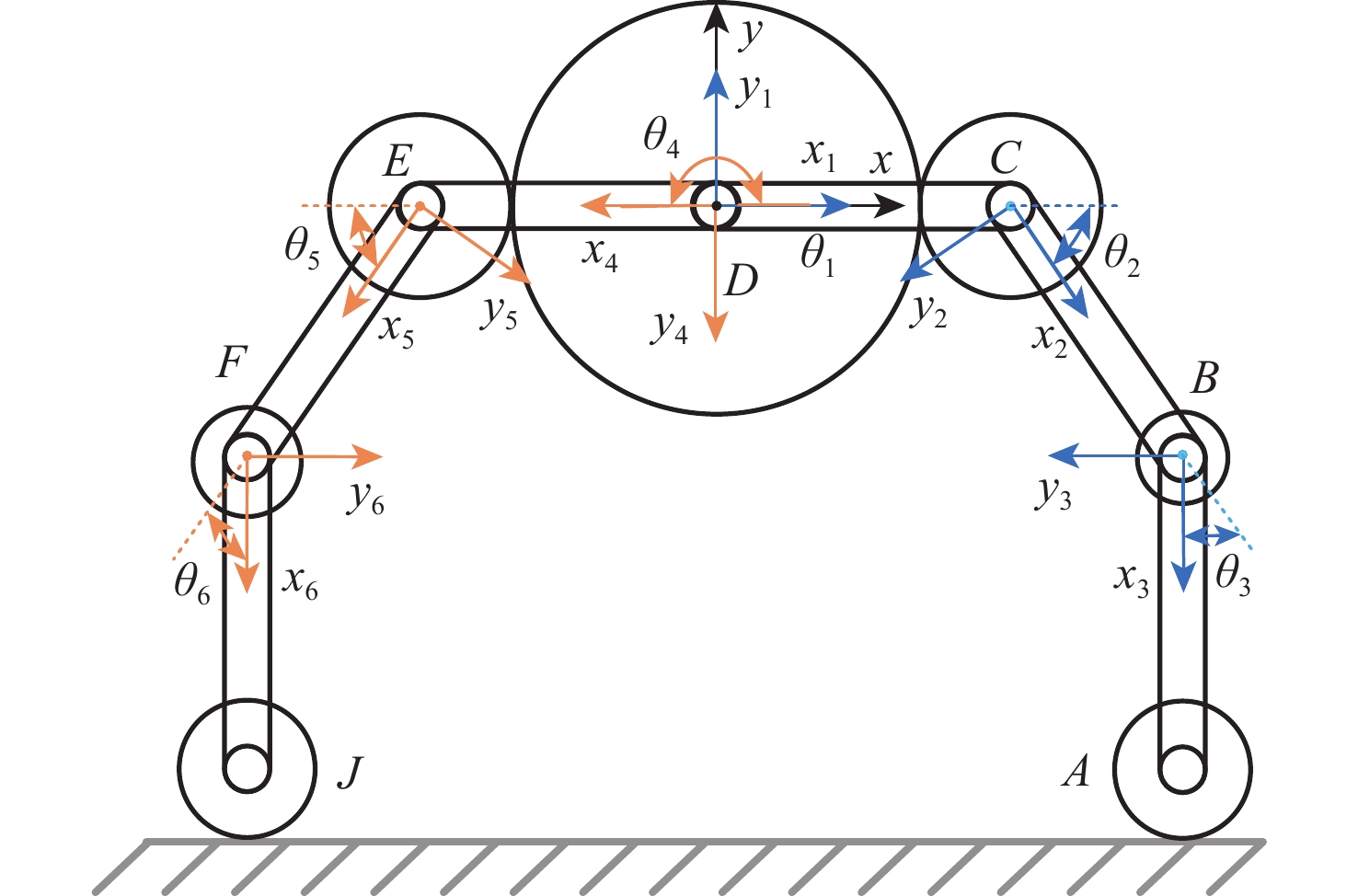
表 2 平面三自由度连杆参数
Table 2. Parameters of planar 3-dof connecting rod
关节i 连杆转角
$ {\alpha }_{i-1} $/(°)连杆长度
$ {l}_{i-1} $连杆偏距
${d_i}/{\mathrm{mm}}$关节转角${\theta _i}$ 1 0 0 0 ${\theta _1}$ 2 0 ${l_1}$ 0 ${\theta _2}$ 3 0 ${l_2}$ 0 ${\theta _3}$ 4 0 0 0 ${\theta _4}$ 5 0 ${l_4}$ 0 ${\theta _5}$ 6 0 ${l_5}$ 0 ${\theta _6}$
下载: 导出CSV
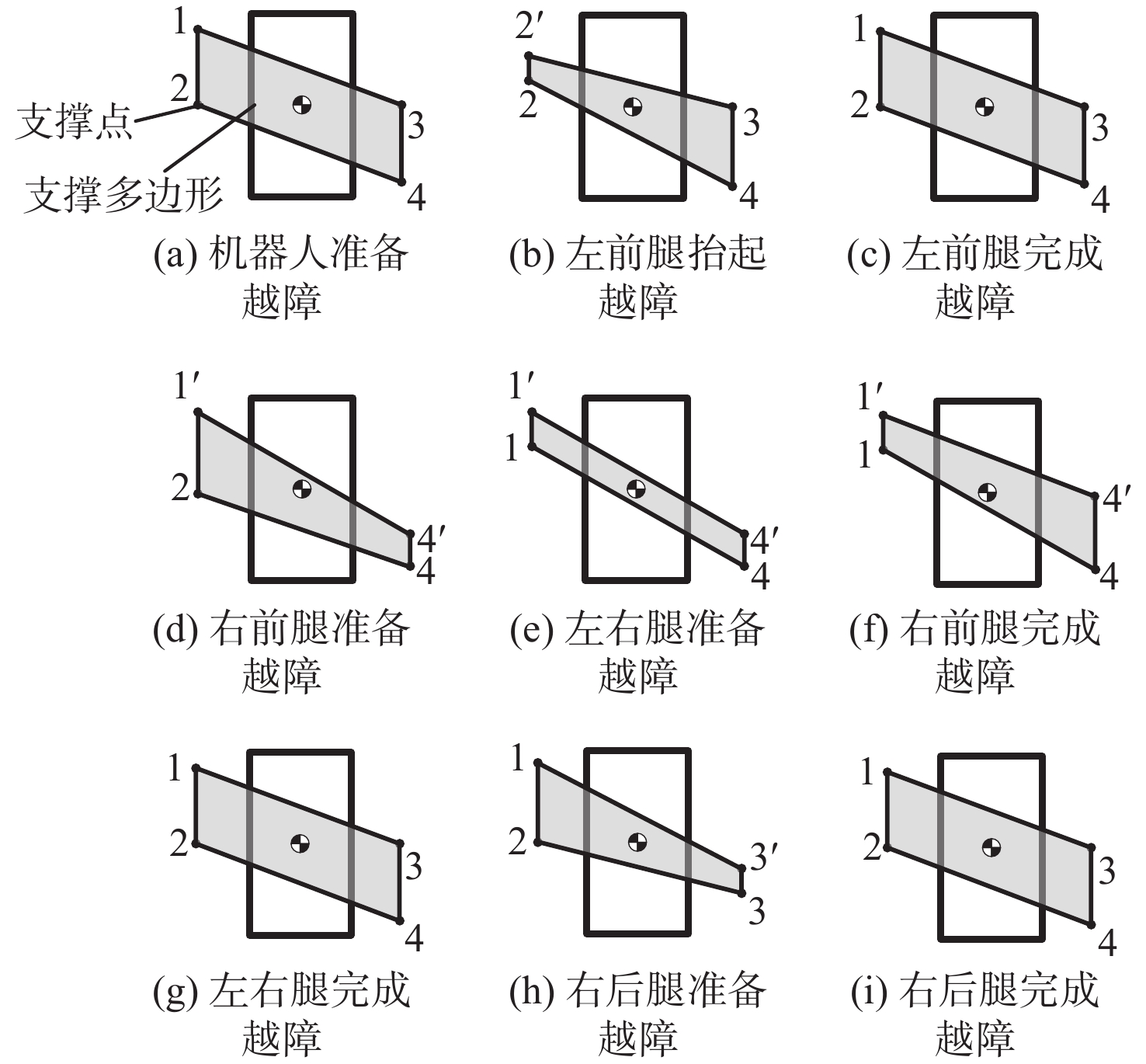
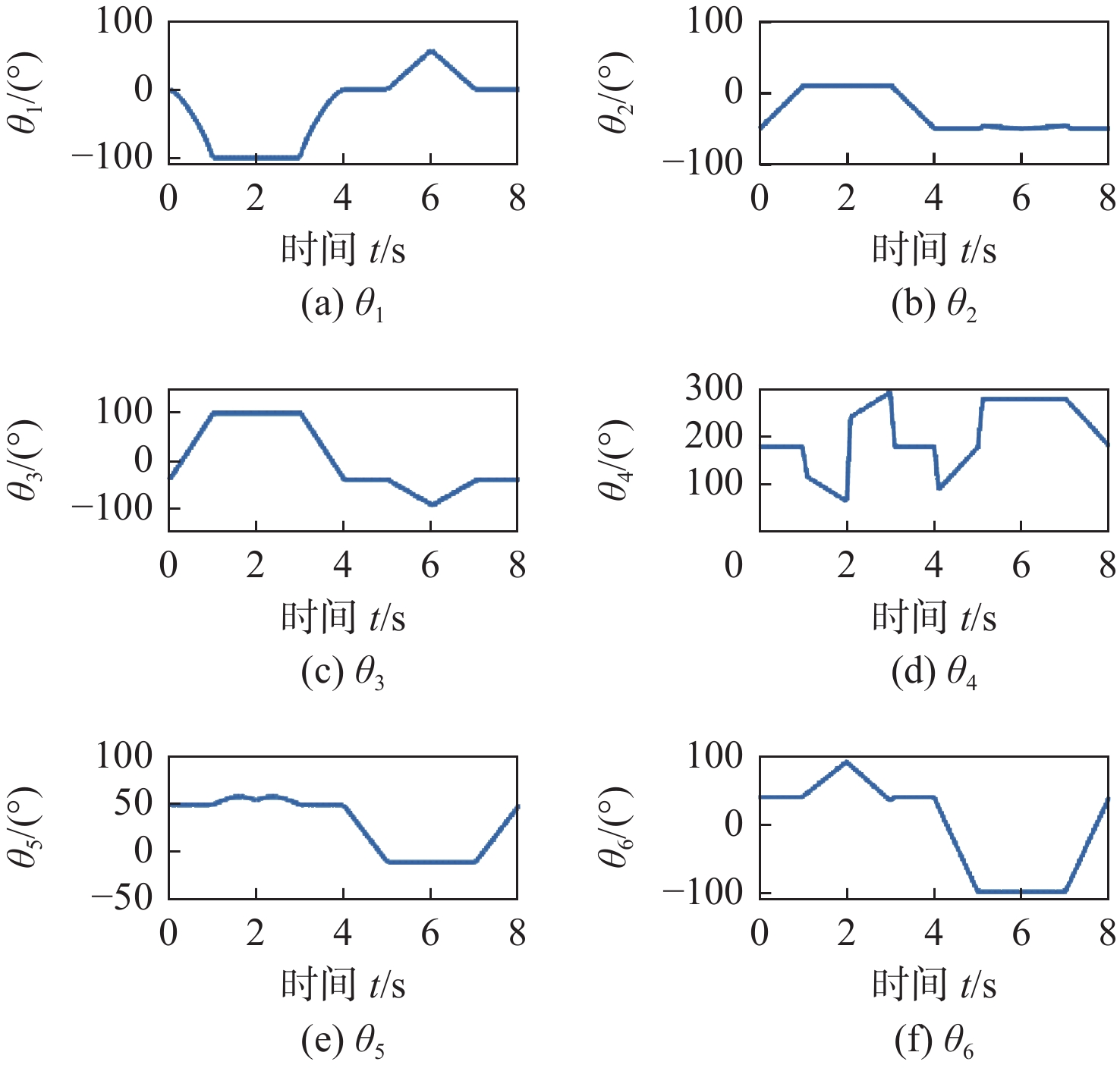
表 3 关节转角变化
Table 3. Joint angle change
(°) 阶段 $ \theta_{1}$ $ \theta_{1} $ $ \theta_{3} $ $ \theta_{4} $ $ \theta_{5} $ $ \theta_{6} $ a −99 9 97.2 180 50.1 39.9 b −99 9 97.2 123.5 54.8 91.5 c −99 9 97.2 180 50.1 39.9 d 0 −50.1 −39.9 180 50.1 39.9 e 0 −50.1 −39.9 279 −9 −97.2 f 56.5 −54.8 −91.5 279 −9 −97.2 g 0 −50.1 −39.9 279 −9 −97.2 h 0 −50.1 −39.9 180 50.1 39.9
下载: 导出CSV
-
[1] 刘吉成, 季洪超. 新型轮腿机器人步态规划策略[J]. 中国机械工程, 2019, 30(18): 2257-2262.LIU J C, JI H C. Gait planning strategy for a new type of wheel-legged robot[J]. China Mechanical Engineering, 2019, 30(18): 2257-2262(in Chinese). [2] 秦现生, 张雪峰, 谭小群, 等. 类哺乳动物腿式机器人研究综述[J]. 中国机械工程, 2013, 24(6): 841-851. doi: 10.3969/j.issn.1004-132X.2013.06.027QIN X S, ZHANG X F, TAN X Q, et al. Mammalian legged robot: A review[J]. China Mechanical Engineering, 2013, 24(6): 841-851(in Chinese). doi: 10.3969/j.issn.1004-132X.2013.06.027 [3] 苏磊, 侯宇, 吴飞, 等. 轮足式机器人机构设计及越障性能分析[J]. 机械设计与制造, 2016(8): 46-48. doi: 10.3969/j.issn.1001-3997.2016.08.013SU L, HOU Y, WU F, et al. Design and analysis of wheel foot type robot mechanism and the obstacle-surmounting performance[J]. Machinery Design & Manufacture, 2016(8): 46-48(in Chinese). doi: 10.3969/j.issn.1001-3997.2016.08.013 [4] 甄伟鲲, 康熙, 张新生, 等. 一种新型四足变胞爬行机器人的步态规划研究[J]. 机械工程学报, 2016, 52(11): 26-33. doi: 10.3901/JME.2016.11.026ZHEN W K, KANG X, ZHANG X S, et al. Gait planning of a novel metamorphic quadruped robot[J]. Journal of Mechanical Engineering, 2016, 52(11): 26-33(in Chinese). doi: 10.3901/JME.2016.11.026 [5] 徐坤, 丁希仑, 李可佳. 圆周对称分布六腿机器人三种典型行走步态步长及稳定性分析[J]. 机器人, 2012, 34(2): 231-241. doi: 10.3724/SP.J.1218.2012.00231XU K, DING X L, LI K J. Stride size and stability analysis of a radially symmetrical hexapod robot in three typical gaits[J]. Robot, 2012, 34(2): 231-241(in Chinese). doi: 10.3724/SP.J.1218.2012.00231 [6] ZHENG C G, LIU J H, GRIFT T E, et al. Design and analysis of a wheel-legged hybrid locomotion mechanism[J]. Advances in Mechanical Engineering, 2015, 7(11): 168781401561690. [7] 余联庆, 王玉金, 王立平, 等. 基于机体翻转的四足机器人翻越台阶过程的运动学分析[J]. 中国机械工程, 2012, 23(5): 518-524.YU L Q, WANG Y J, WANG L P, et al. Kinematics analysis of quadruped robot climbing step based on body flipping[J]. China Mechanical Engineering, 2012, 23(5): 518-524(in Chinese). [8] SUN T, XIANG X, SU W H, et al. A transformable wheel-legged mobile robot: Design, analysis and experiment[J]. Robotics and Autonomous Systems, 2017, 98: 30-41. doi: 10.1016/j.robot.2017.09.008 [9] ZHOU C X, WANG X, LI Z B, et al. Exploiting the redundancy for humanoid robots to dynamically step over a large obstacle[C]//Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2015: 1599-1604. [10] GUAN Y S, YOKOI K, TANIE K. Feasibility: Can humanoid robots overcome given obstacles? [C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2005: 1054-1059. [11] 刘彪, 黄之峰, 章云. 借助外力助推的双足机器人越障及避障方法研究[J]. 广东工业大学学报, 2019, 36(2): 62-69.LIU B, HUANG Z F, ZHANG Y. A research on biped robot’s obstacle stepping over and avoidance assisted by external forces[J]. Journal of Guangdong University of Technology, 2019, 36(2): 62-69(in Chinese). [12] NIU J Y, WANG H B, SHI H M, et al. Study on structural modeling and kinematics analysis of a novel wheel-legged rescue robot[J]. International Journal of Advanced Robotic Systems, 2018, 15(1): 172988141775275. [13] 王雁东, 唐昭, 戴建生. 连杆铰接轮腿式机器人的运动学与步态分析[J]. 机械工程学报, 2018, 54(7): 11-19. doi: 10.3901/JME.2018.07.011WANG Y D, TANG Z, DAI J S. Kinematics and gait analysis of a linkage-jointed wheel-legged robot[J]. Journal of Mechanical Engineering, 2018, 54(7): 11-19(in Chinese). doi: 10.3901/JME.2018.07.011 [14] 张礼华, 费蓝冰, 楼飞, 等. 新型轮腿式地面移动机器人的结构设计与运动特性分析[J]. 中国机械工程, 2015, 26(21): 2867-2872.ZHANG L H, FEI L B, LOU F, et al. Structure design and analysis of movement characteristics for a new type wheel-legged UGV[J]. China Mechanical Engineering, 2015, 26(21): 2867-2872(in Chinese). [15] CHEN Z H, WANG S K, WANG J Z, et al. Control strategy of stable walking for a hexapod wheel-legged robot[J]. ISA Transactions, 2021, 108: 367-380. doi: 10.1016/j.isatra.2020.08.033 [16] ZHANG S, YAO J T, WANG Y B, et al. Design and motion analysis of reconfigurable wheel-legged mobile robot[J]. Defence Technology, 2022, 18(6): 1023-1040. doi: 10.1016/j.dt.2021.04.013 [17] YUMBLA F, WOO S, YUMBLA E Q, et al. Motions analysis for stair climbing by two or three steps and cross over an obstacle for a quadruped Robot[C]//Proceedings of the 2020 20th International Conference on Control, Automation and Systems. Piscataway: IEEE Press, 2020: 262-267. [18] YOON D, KIM B, JO I, et al. A dynamic locomotion strategy for stair walking of a quadruped robot[C]//Proceedings of the 2021 18th International Conference on Ubiquitous Robots. Piscataway: IEEE Press, 2021: 223-227. [19] ZHAO J W, HAN T, WANG S Z, et al. Design and research of all-terrain wheel-legged robot[J]. Sensors, 2021, 21(16): 5367. doi: 10.3390/s21165367 [20] XU K, ZI P J, DING X L. Gait analysis of quadruped robot using the equivalent mechanism concept based on metamorphosis[J]. Chinese Journal of Mechanical Engineering, 2019, 32(1): 8. doi: 10.1186/s10033-019-0321-2 [21] ERBATUR K, OKAZAKI A, OBIYA K, et al. A study on the zero moment point measurement for biped walking robots[C]//Proceedings of the 7th International Workshop on Advanced Motion Control Proceedings. Piscataway: IEEE Press, 2002: 431-436. [22] 周坤, 李川, 李超, 等. 面向未知复杂地形的四足机器人运动规划方法[J]. 机械工程学报, 2020, 56(2): 210-219. doi: 10.3901/JME.2020.02.210ZHOU K, LI C, LI C, et al. Motion planning method for quadruped robots walking on unknown rough terrain[J]. Journal of Mechanical Engineering, 2020, 56(2): 210-219(in Chinese). doi: 10.3901/JME.2020.02.210 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 177
- HTML全文浏览量: 101
- PDF下载量: 7
- 被引次数: 0
