



-
摘要:
针对舵机电动负载模拟器(ELSSG)受到多余力矩干扰的问题,提出了一种结合迭代学习控制与误差符号鲁棒积分控制(RISE)的复合控制器。建立了ELSSG的数学模型,分析了多余力矩的产生机理。在硬件结构上,引入了金属-橡胶缓冲弹簧以提高系统稳定性及加载精度;在控制策略上,基于误差符号鲁棒积分控制与自适应遗忘因子改进的引导信号迭代学习控制设计了复合控制器,并证明了该迭代学习控制的收敛条件。通过仿真实验证明了复合控制器与传统迭代学习控制方法、PID控制方法相比,能够更加有效地消除多余力矩干扰,提高ELSSG加载力矩输出精度。
Abstract:The electric load simulator of aircraft steering gear (ELSSG) is disturbed by redundant torque. To address this issue,a compound controller combining iterative learning control and robust integral control of sign of error (RISE) was proposed. The mathematical model of the load simulator was established, and the generation mechanism of excess torque was analyzed.In terms of the hardware structure, the metal-rubber buffer spring was introduced to improve the stability and loading accuracy of the system. In terms of the control strategy, the compound controller was designed based on the robust integral control of error signs and the iterative learning control of the guidance signal improved by adaptive forgetting factor, and the convergence condition of the iterative learning control was proven. The simulation experiment proves that the compound controller can eliminate the interference from redundant torque more effectively than the traditional iterative learning control method and PID control method and improve the load torque output accuracy of the load simulator.
-
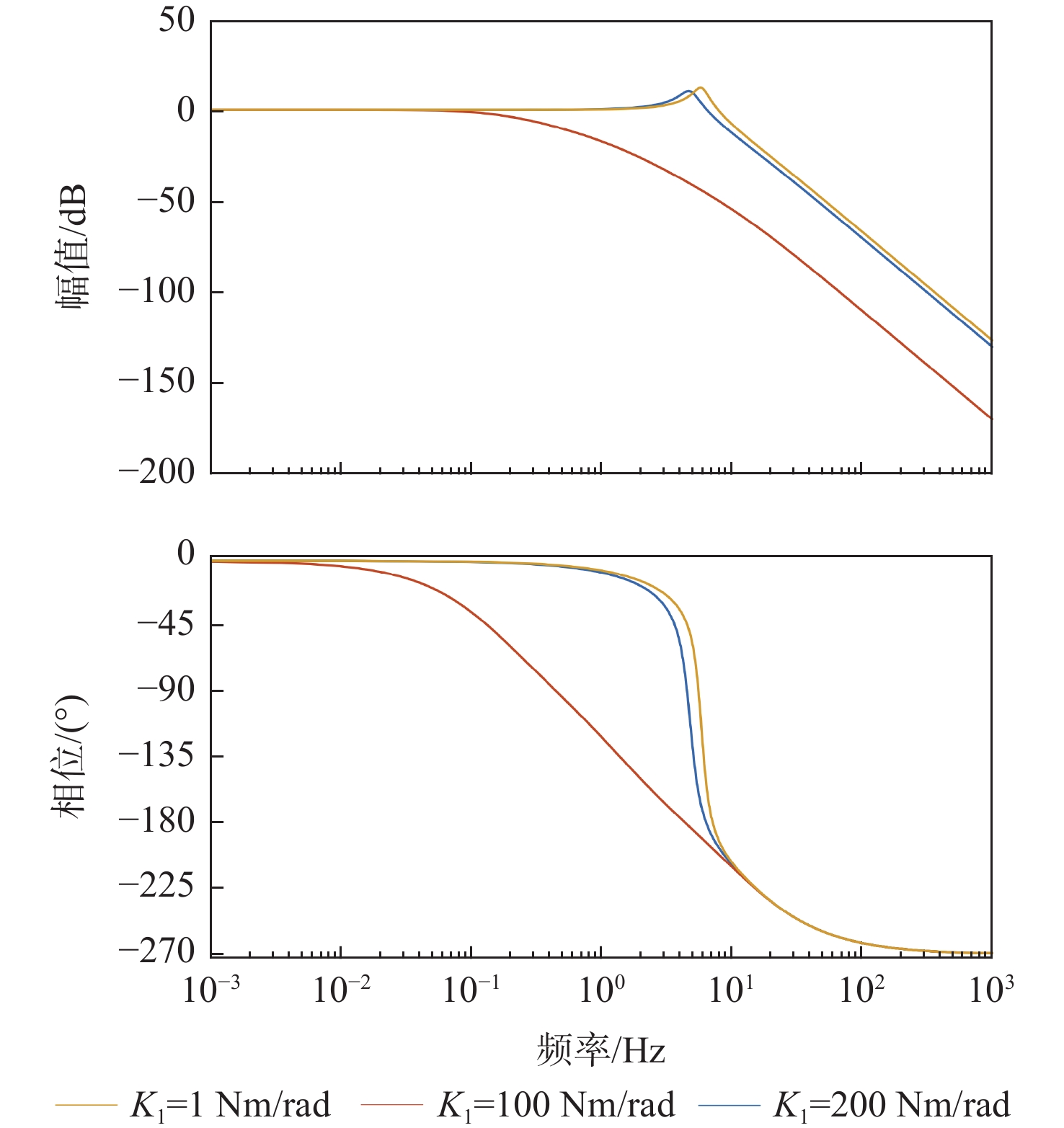
图 3 不同弹性系数的系统频率特性曲线
Figure 3. Frequency characteristic curves of systems with different elastic coefficients
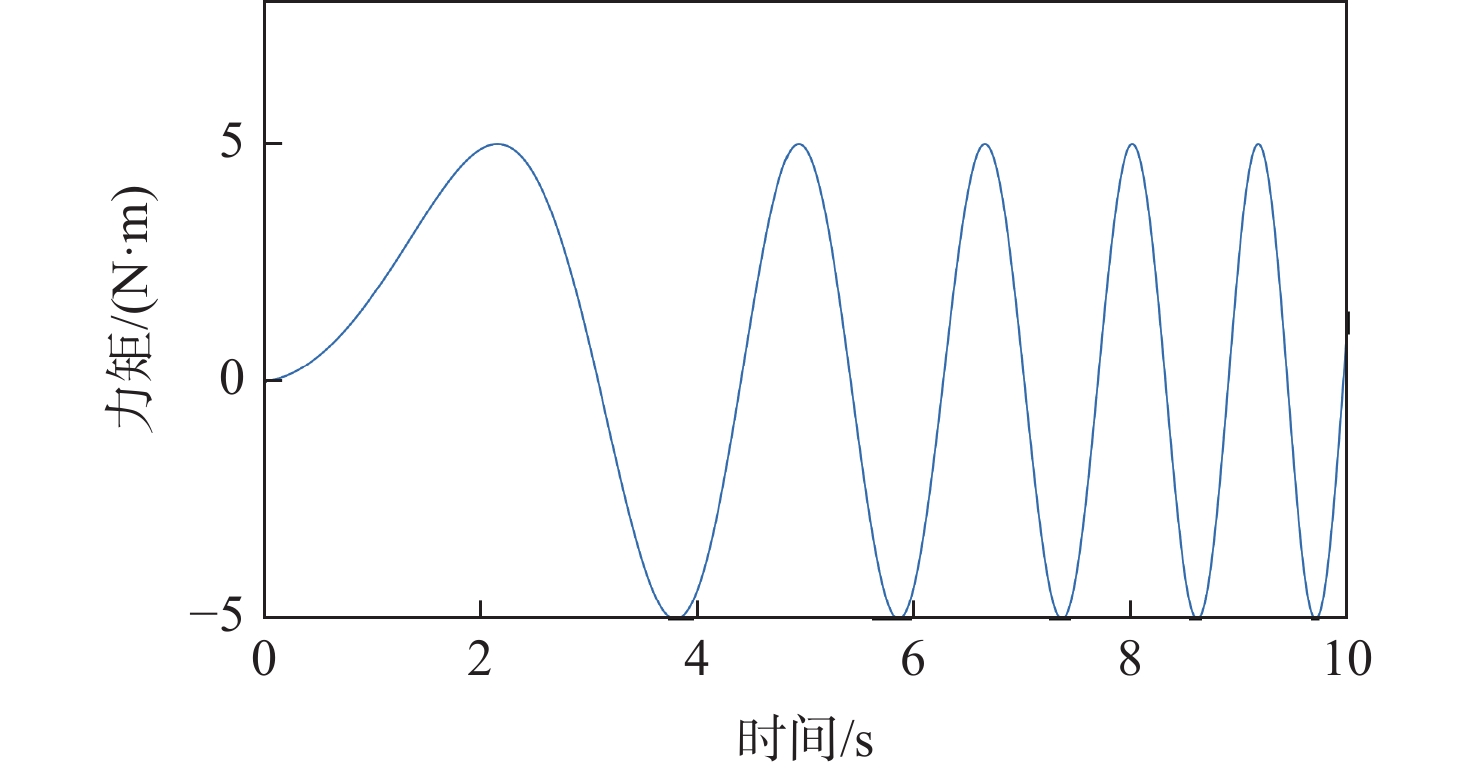
图 8 变频率正弦信号(扫频信号)图像
Figure 8. Sinusoidal signal (sweep frequency signal) image with variable frequency
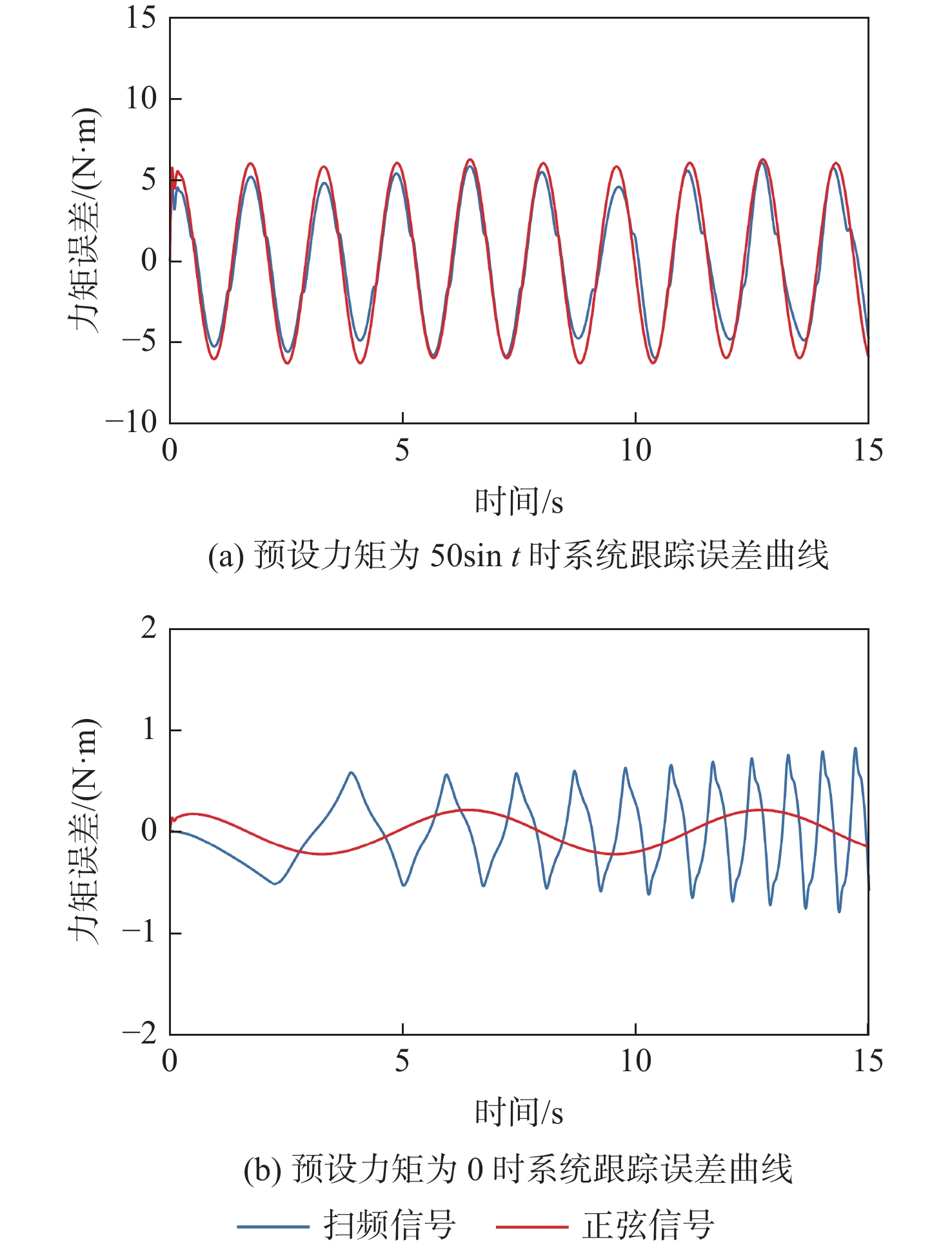
图 9 不同预设力矩下系统跟踪误差曲线
Figure 9. System tracking error curves under different preset torques
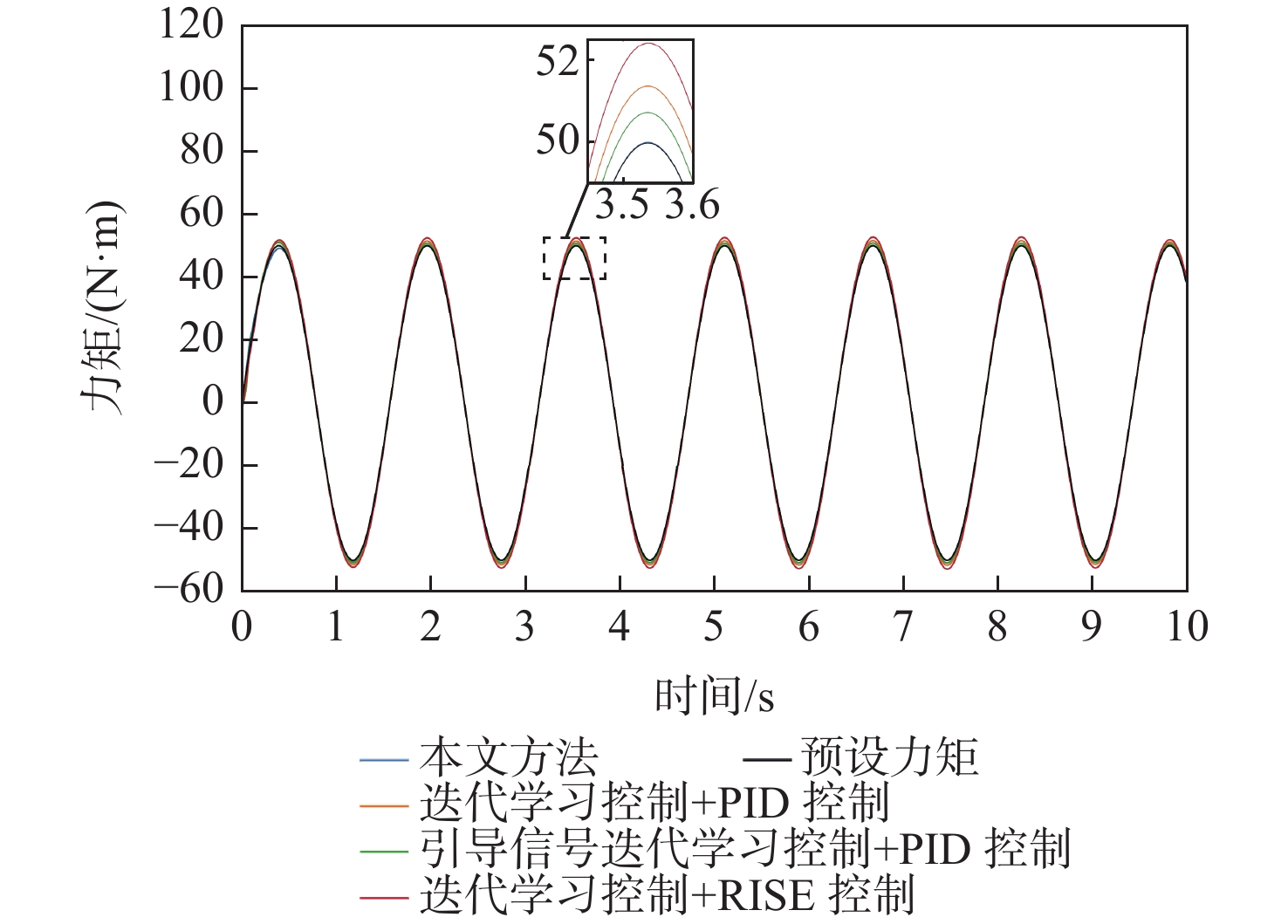
图 10 预设信号频率为1 Hz时ELSSG输出力矩
Figure 10. ELSSG output torque when preset signal frequency is 1 Hz
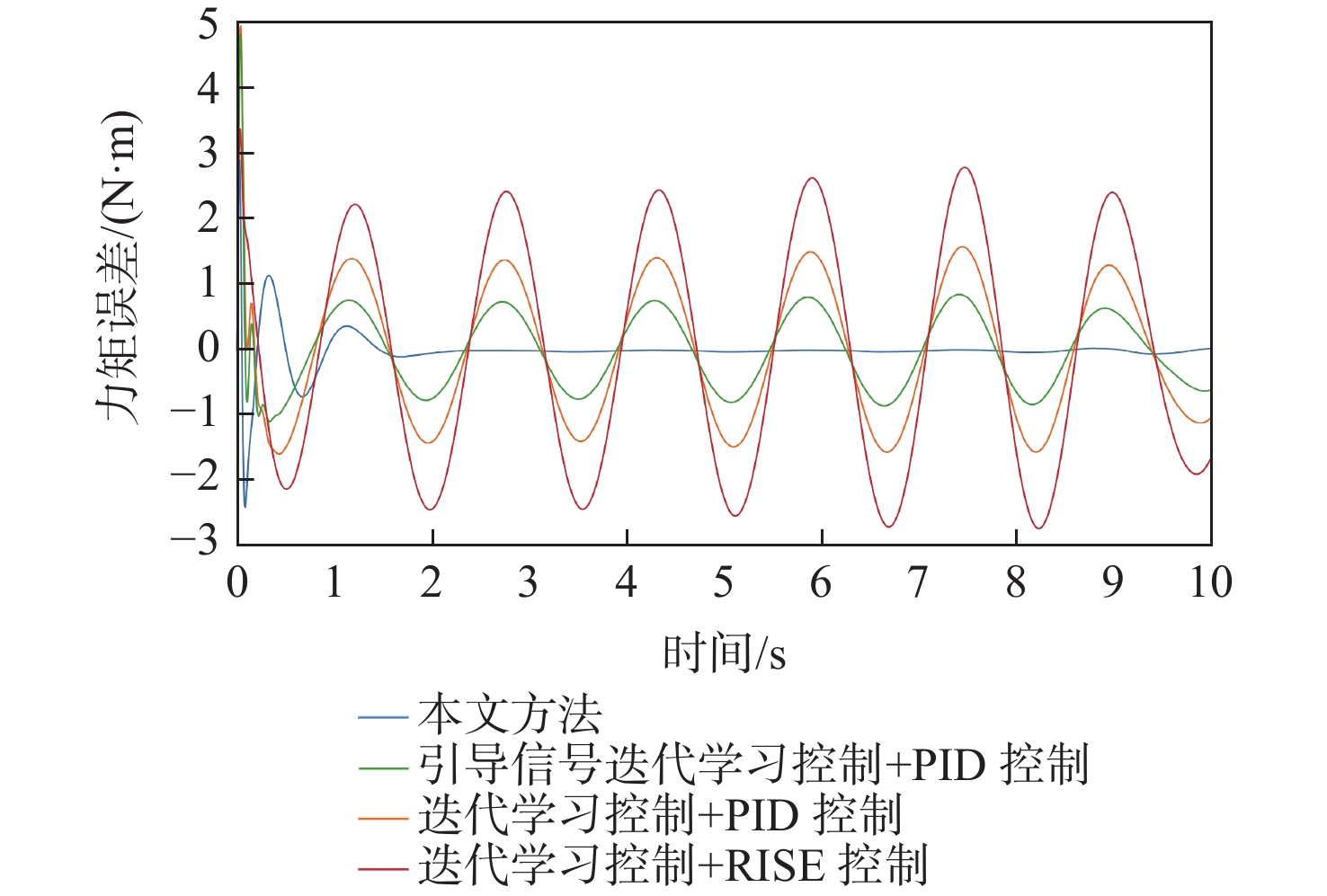
图 11 预设信号频率为1 Hz时ELSSG输出力矩误差
Figure 11. ELSSG output torque error when preset signal frequency is 1 Hz
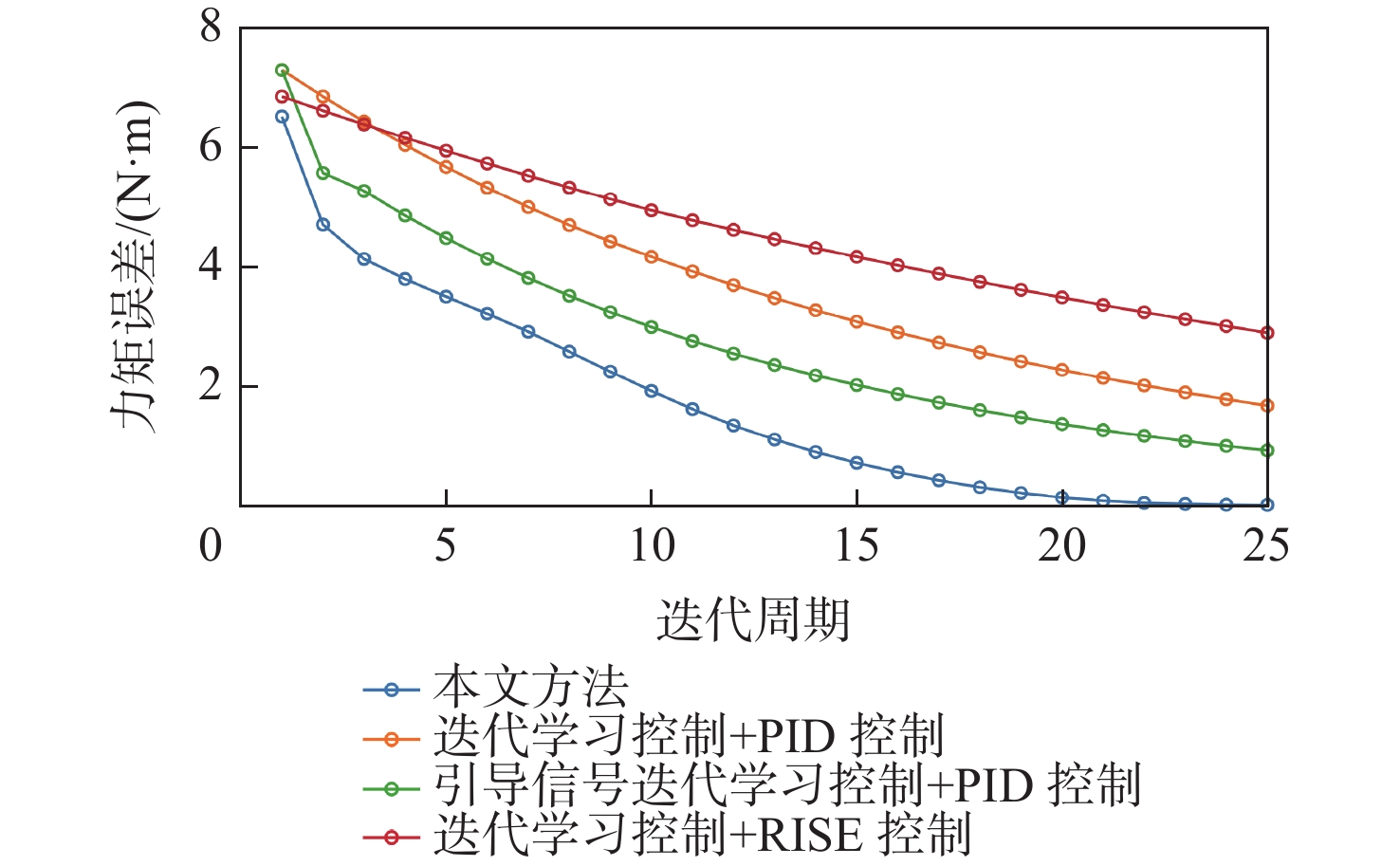
图 12 预设信号频率为1 Hz时力矩误差随迭代周期变化
Figure 12. Variation of torque error with iterative periods when preset signal frequency is 1 Hz
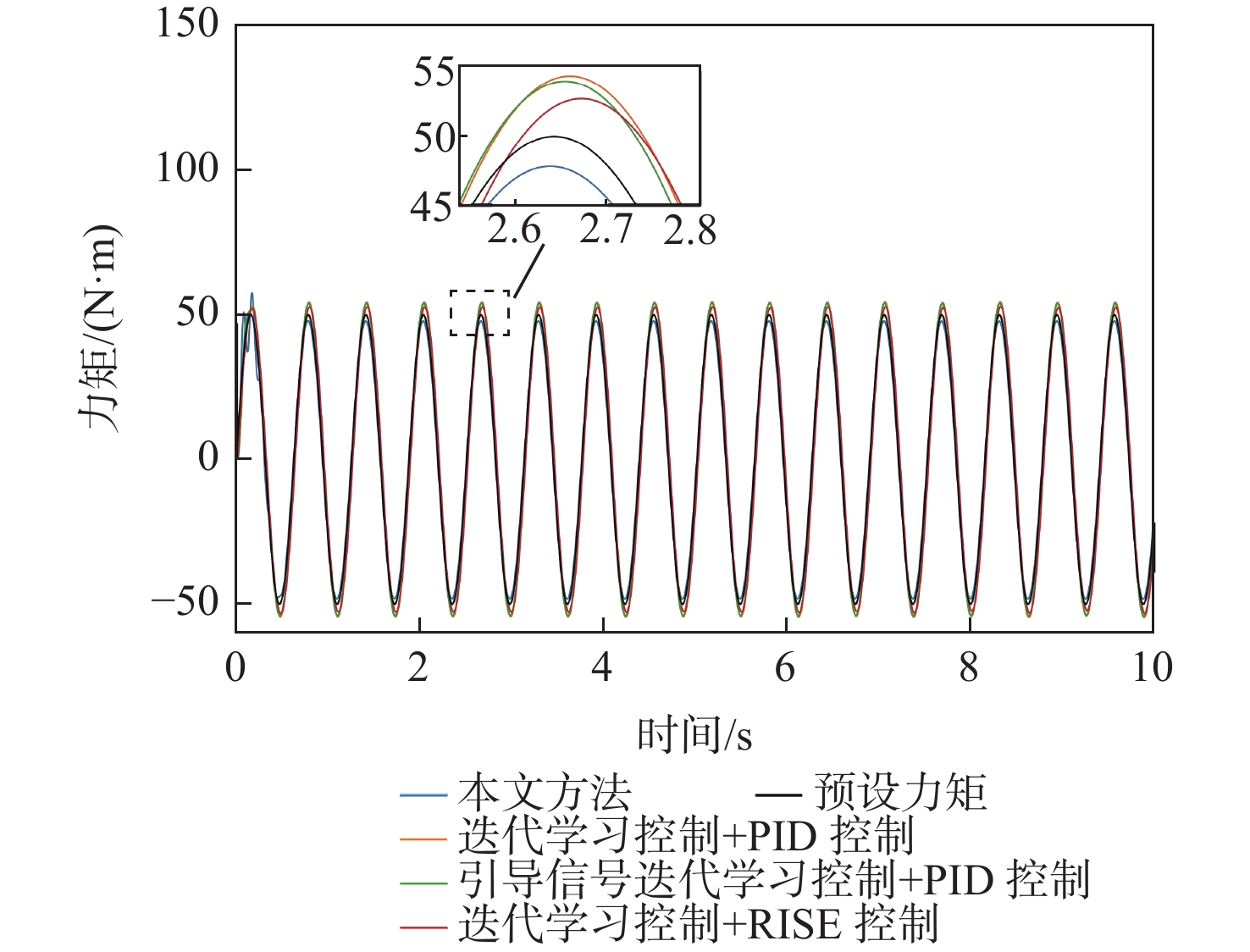
图 13 预设信号频率为10 Hz时ELSSG输出力矩
Figure 13. ELSSG output torque when preset signal frequency is 10 Hz
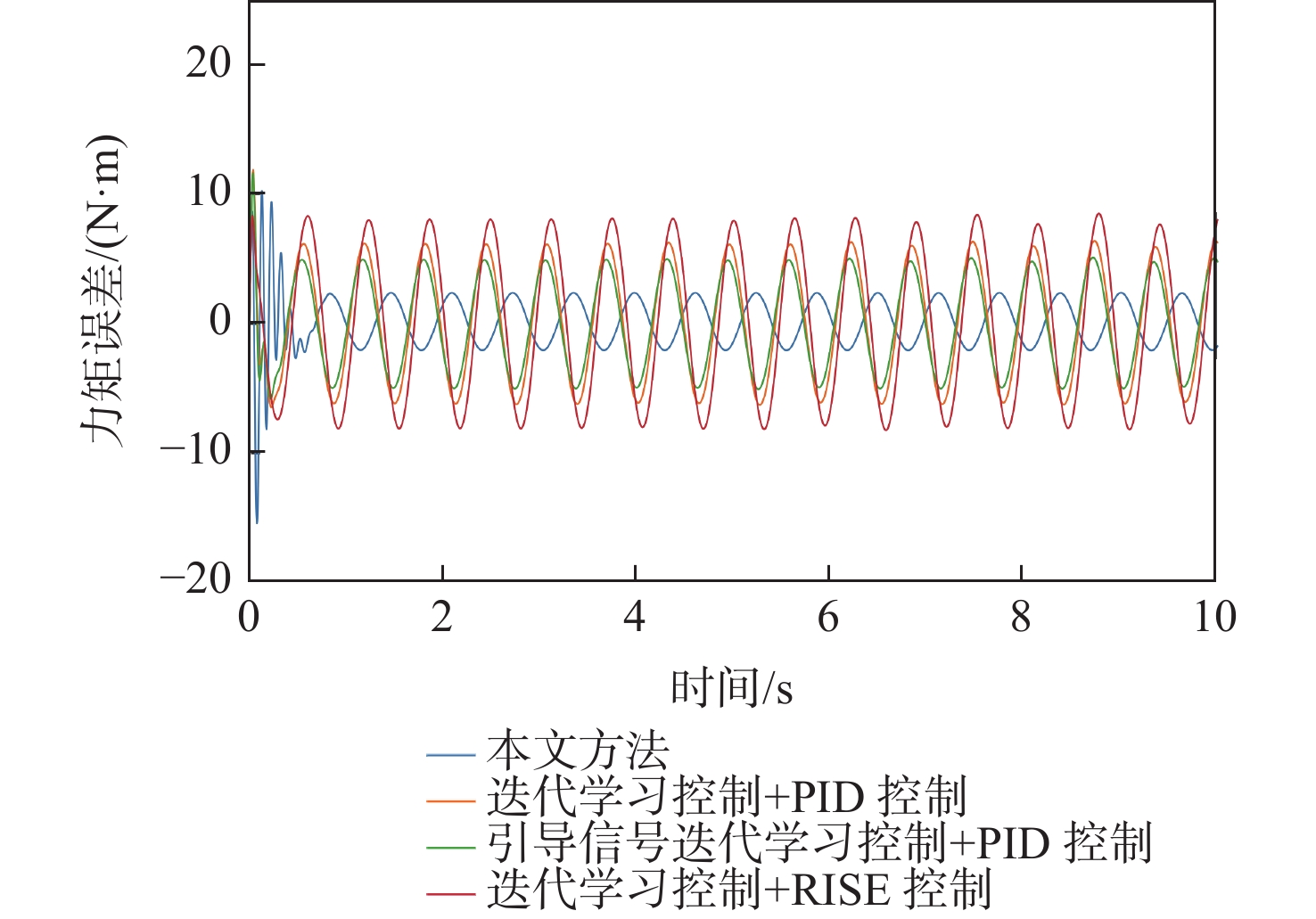
图 14 预设信号频率为10 Hz时ELSSG输出力矩误差
Figure 14. ELSSG output torque error when preset signal frequency is 10 Hz

图 15 预设信号频率为10 Hz时力矩误差随迭代周期变化
Figure 15. Variation of torque error with iterative periods when preset signal frequency is 10 Hz

图 16 添加舵机前馈控制后控制结构示意图
Figure 16. Control structure after adding feed forward control of aircraft steering gear
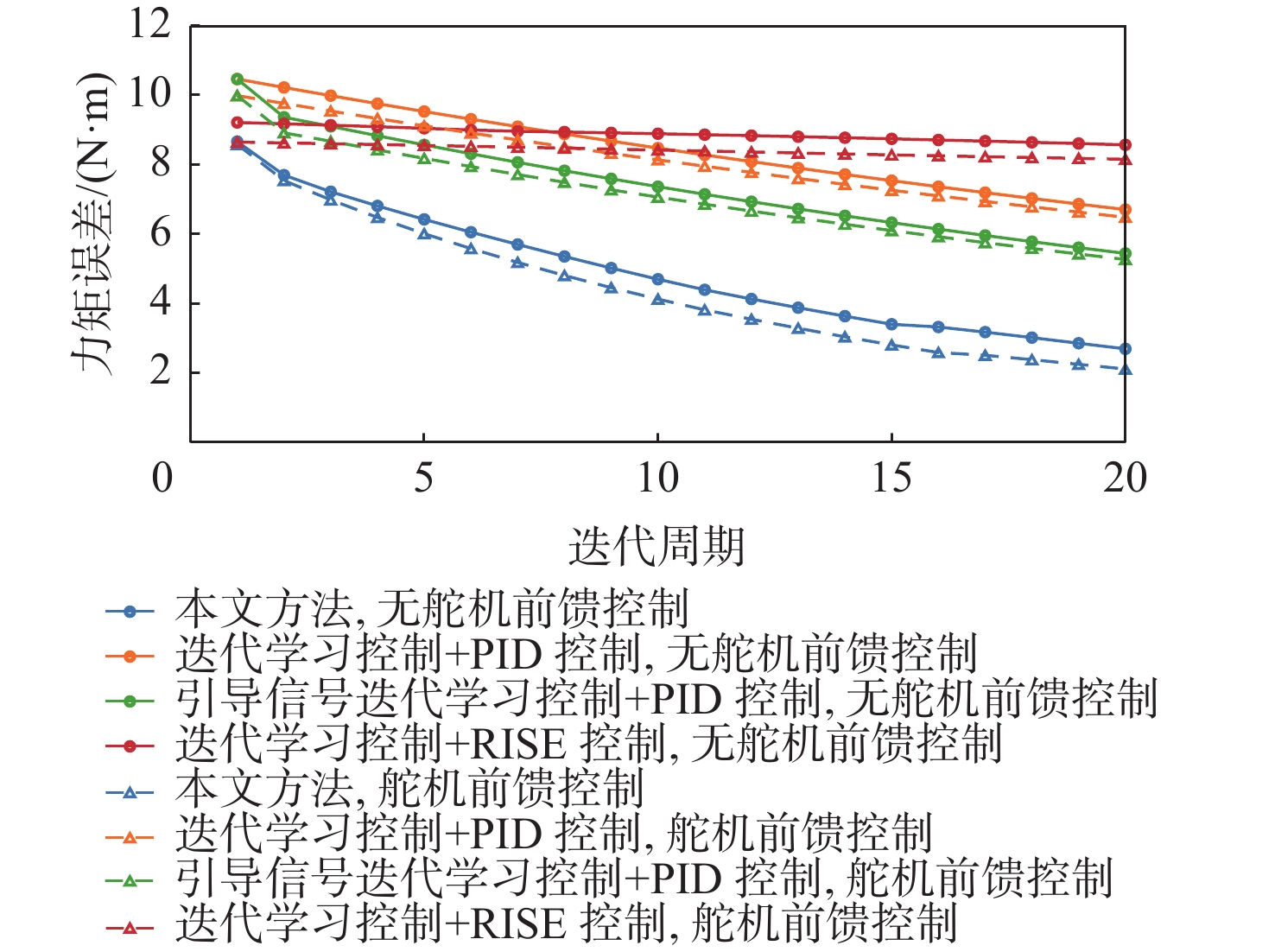
图 17 添加不同前馈控制方法后不同迭代周期下的力矩跟踪误差
Figure 17. Torque tracking error of different iteration periods after adding different feedforward control methods
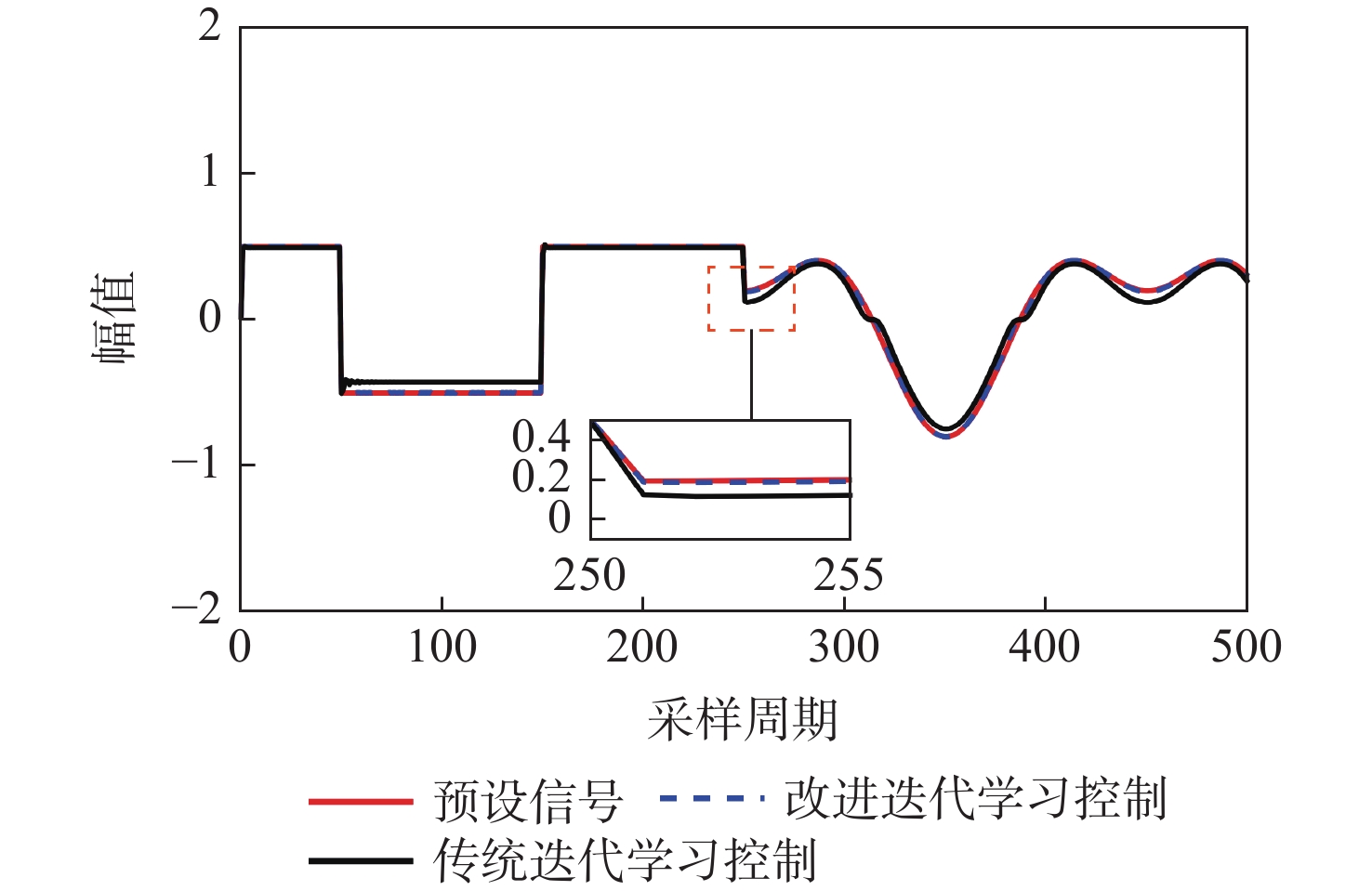
表 1 不同迭代学习控制下系统的跟踪误差
Table 1. Tracking error of system under different iterative learning control
方法 迭代次数 最大跟踪误差/(N·m) 误差率/% 传统迭代
学习控制10 0.41 51.2 20 0.0517 6.46 改进迭代
学习控制10 0.1995 24.9 20 0.0234 2.925  下载: 导出CSV
下载: 导出CSV
表 2 预设信号为1 Hz时力矩跟踪误差
Table 2. Torque tracking error when preset signal is 1 Hz
方法 最大跟踪误差/(N·m) 误差率/% 本文方法 0.06 0.12 迭代学习控制+PID控制 1.67 3.34 引导信号迭代学习控制+PID控制 0.92 1.84 迭代学习控制+RISE控制 2.59 5.18
下载: 导出CSV
表 3 预设信号为10 Hz时力矩跟踪误差
Table 3. Torque tracking error when preset signal is 10 Hz
方法 最大跟踪误差/(N·m) 误差率/% 本文方法 2.60 5.20 迭代学习控制+PID控制 6.70 13.40 引导信号迭代学习控制+PID控制 5.44 10.88 迭代学习控制+RISE控制 8.57 17.14
下载: 导出CSV
表 4 前馈控制实验力矩跟踪误差
Table 4. Torque tracking error of feedforward experiment
是否添加舵机
前馈控制器方法 最大跟踪
误差/(N·m)误差率/% 否 本文方法 2.60 5.20 迭代学习控制+PID控制 6.70 13.40 引导信号迭代学习
控制+PID控制5.44 10.88 迭代学习控制+RISE控制 8.57 17.14 是 本文方法 2.12 4.24 迭代学习控制+PID控制 6.48 12.96 引导信号迭代学习
控制+PID控制5.26 10.56 迭代学习控制+RISE控制 8.15 16.30
下载: 导出CSV
-
[1] 李成成, 王广林, 潘旭东, 等. 电动负载模拟器摩擦模型参数辨识方法[J]. 振动测试与诊断, 2020, 40(3): 519-525.LI C C, WANG G L, PAN X D, et al. Research on parameter identification method of friction model for electric load simulator[J]. Journal of Vibration, Measurement & Diagnosis, 2020, 40(3): 519-525(in Chinese). [2] LIU H T, LIU H R, SHAN X L. Linear active disturbance rejection control with torque compensation for electric load simulator[J]. Journal of Power Electronics, 2021, 21(1): 195-203. doi: 10.1007/s43236-020-00168-7 [3] 王超, 侯远龙, 王力, 等. 炮控系统电动负载模拟器性能影响因素分析[J]. 电机与控制学报, 2016, 20(12): 74-81.WANG C, HOU Y L, WANG L, et al. Influence analysis on electric load simulator for the gun control system[J]. Electric Machines and Control, 2016, 20(12): 74-81(in Chinese). [4] 税洋, 尉建利, 闫杰. 基于模型参考自适应控制的舵机加载系统研究[J]. 西北工业大学学报, 2018, 36(2): 246-251. doi: 10.3969/j.issn.1000-2758.2018.02.006SHUI Y, WEI J L, YAN J. Research on motor drive load simulator based on model reference adaptive control[J]. Journal of Northwestern Polytechnical University, 2018, 36(2): 246-251(in Chinese). doi: 10.3969/j.issn.1000-2758.2018.02.006 [5] FU Z, WANG S P, WANG X J. ESO-based adaptive robust force control of linear electric load simulator[C]//Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems. London: IET, 2018: 1-6. [6] 林辉, 吕帅帅, 陈晓雷, 等. 导弹尾翼电动负载模拟器快速终端滑模控制[J]. 哈尔滨工业大学学报, 2017, 49(3): 22-28. doi: 10.11918/j.issn.0367-6234.2017.03.003LIN H, LU S S, CHEN X L, et al. Fast terminal sliding mode control for missile rudder electric dynamic load simulator systems[J]. Journal of Harbin Institute of Technology, 2017, 49(3): 22-28(in Chinese). doi: 10.11918/j.issn.0367-6234.2017.03.003 [7] LUO C Y, YAO J Y, CHEN F H, et al. Adaptive repetitive control of hydraulic load simulator with RISE feedback[J]. IEEE Access, 2017, 5: 23901-23911. doi: 10.1109/ACCESS.2017.2762665 [8] 刘晓琳, 姜梦馨. 基于WOA的飞机舵机电动加载系统双环复合控制研究[J]. 振动与冲击, 2021, 40(12): 246-253.LIU X L, JIANG M X. A study on double loop composite control based on WOA for an aircraft rudder electric loading system[J]. Journal of Vibration and Shock, 2021, 40(12): 246-253(in Chinese). [9] 郭行, 陈康, 孙力, 等. 一种引入位置比例控制提高电动负载模拟器性能的控制系统设计方法[J]. 西北工业大学学报, 2014, 32(2): 235-239. doi: 10.3969/j.issn.1000-2758.2014.02.015GUO H, CHEN K, SUN L, et al. An effective method for designing control system of motor-driven torque control simulator by introducing position proportional control[J]. Journal of Northwestern Polytechnical University, 2014, 32(2): 235-239(in Chinese). doi: 10.3969/j.issn.1000-2758.2014.02.015 [10] 刘晓琳, 李卓. 飞机舵机电动加载系统多余力矩抑制方法[J]. 系统工程与电子技术, 2019, 41(6): 1366-1373. doi: 10.3969/j.issn.1001506X.2019.06.26LIU X L, LI Z. Method to restrain extra torque of aircraft rudderelectric loading system[J]. Systems Engineering and Electronics, 2019, 41(6): 1366-1373(in Chinese). doi: 10.3969/j.issn.1001506X.2019.06.26 [11] HAN H T, YANG B. A CMAC based self-tuning intelligent PID controller for electric load simulator[C]//Proceedings of the 3rd International Conference on Instrumentation, Measurement, Computer, Communication and Control. Piscataway: IEEE Press, 2013: 1443-1448. [12] 潘卫东, 范元勋, 雷建杰, 等. 摩擦对电动直线负载模拟器的影响及其抑制研究[J]. 兵工学报, 2019, 40(10): 2050-2059. doi: 10.3969/j.issn.1000-1093.2019.10.010PAN W D, FAN Y X, LEI J J, et al. Effect of friction on electric linear load simulator and research on friction suppression[J]. Acta Armamentarii, 2019, 40(10): 2050-2059(in Chinese). doi: 10.3969/j.issn.1000-1093.2019.10.010 [13] ZHANG M, YANG B. A naive method of applying fuzzy logic to CMAC in electric load simulator[J]. Transactions of the Institute of Measurement and Control, 2017, 39(10): 1590-1599. doi: 10.1177/0142331216659335 [14] ULLAH N, KHAN W, WANG S P. High performance direct torque control of electrical aerodynamics load simulator using fractional calculus[J]. Acta Polytechnica Hungarica, 2014, 11(10): 59-78. doi: 10.12700/APH.11.10.2014.10.4 [15] 代明光, 齐蓉. 基于扩展状态观测器的电动负载模拟器反演滑模控制[J]. 航空学报, 2020, 41(5): 323683.DAI M G, QI R. Backstepping sliding mode control of electric dynamic load simulator based on extended state observer[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 323683(in Chinese). [16] 牛国臣, 王巍, 宗光华. 基于迭代学习的电动负载模拟器复合控制[J]. 控制理论与应用, 2014, 31(12): 1740-1747.NIU G C, WANG W, ZONG G H. Composite control for electric load simulator based on iterative learning[J]. Control Theory & Applications, 2014, 31(12): 1740-1747(in Chinese). [17] 黄静, 郑华义, 李宏, 等. 带参数学习的引导信号迭代学习控制方法[J]. 兵工学报, 2019, 40(11): 2363-2369. doi: 10.3969/j.issn.1000-1093.2019.11.021HUANG J, ZHENG H Y, LI H, et al. Guiding signal iterative learning control method with parameter learning[J]. Acta Armamentarii, 2019, 40(11): 2363-2369(in Chinese). doi: 10.3969/j.issn.1000-1093.2019.11.021 [18] 代明光, 齐蓉. 具有控制时滞的电动加载系统迭代学习复合控制[J]. 北京航空航天大学学报, 2020, 46(2): 340-349.DAI M G, QI R. Composite iterative learning control for electric dynamic loading system with control time delay[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 340-349(in Chinese). [19] LI Z, MA X, LI Y B. Robust tracking control strategy for a quadrotor using RPD-SMC and RISE[J]. Neurocomputing, 2019, 331: 312-322. doi: 10.1016/j.neucom.2018.11.070 [20] SU Z K, XIE M Y, LI C T. RISE based active vibration control for the flexible refueling hose[J]. Aerospace Science and Technology, 2019, 92: 387-404. doi: 10.1016/j.ast.2019.06.014 [21] YAO Z K, YAO J Y, SUN W C. Adaptive RISE control of hydraulic systems with multilayer neural-networks[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8638-8647. doi: 10.1109/TIE.2018.2886773 [22] HU C, GAO H B, GUO J H, et al. RISE-based integrated motion control of autonomous ground vehicles with asymptotic prescribed performance[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(9): 5336-5348. doi: 10.1109/TSMC.2019.2950468 [23] YAO J Y, DENG W X, JIAO Z X. RISE-based adaptive control of hydraulic systems with asymptotic tracking[J]. IEEE Transactions on Automation Science and Engineering, 2017, 14(3): 1524-1531. doi: 10.1109/TASE.2015.2434393 [24] 韩松杉, 焦宗夏, 尚耀星, 等. 基于舵机指令前馈的电液负载模拟器同步控制[J]. 北京航空航天大学学报, 2015, 41(1): 124-132.HAN S S, JIAO Z X, SHANG Y X, et al. Synchronizing compensation control of electro-hydraulic load simulator using command signal of actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1): 124-132(in Chinese). [25] 汪成文, 焦宗夏, 罗才瑾. 基于改进的速度同步控制的电液负载模拟器[J]. 航空学报, 2012, 33(9): 1717-1725.WANG C W, JIAO Z X, LUO C J. An improved velocity synchronization control on electro-hydraulic load simulator[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(9): 1717-1725(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 813
- HTML全文浏览量: 108
- PDF下载量: 29
- 被引次数: 0
