



-
摘要:
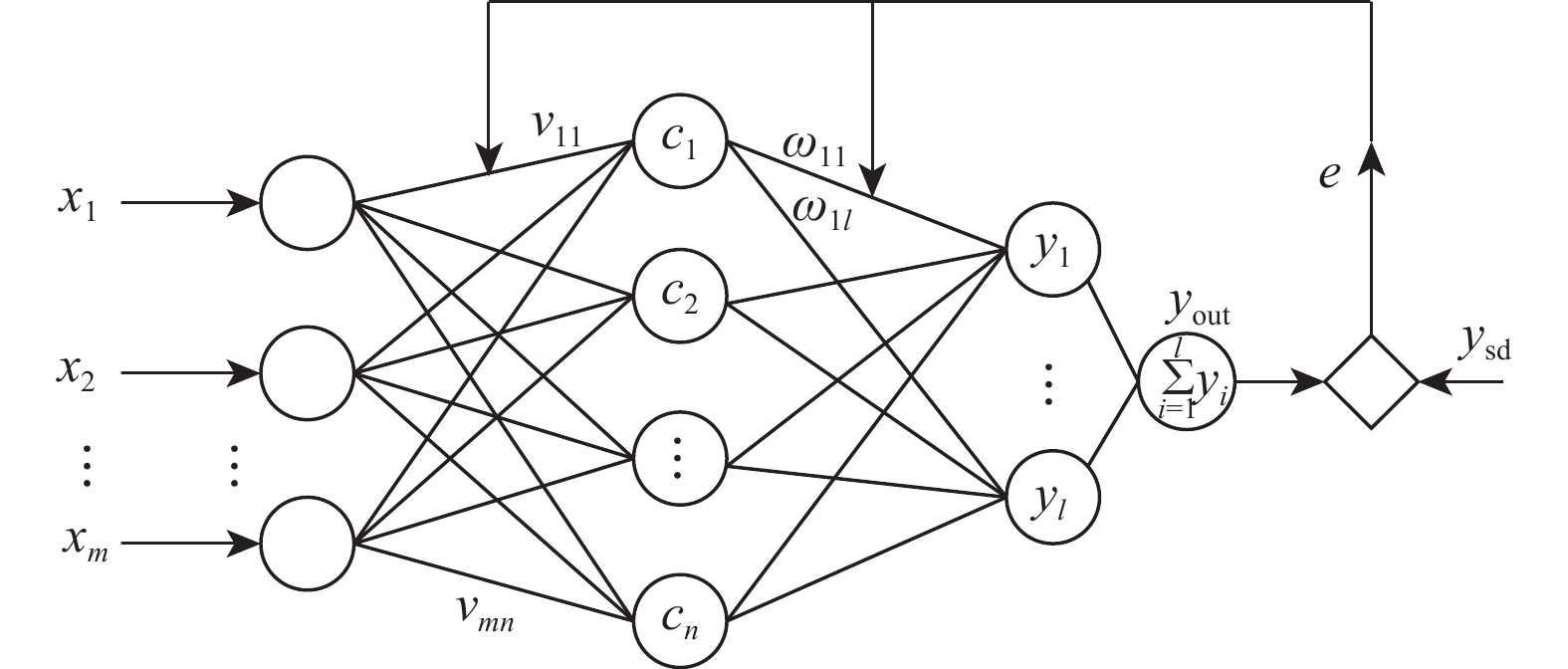
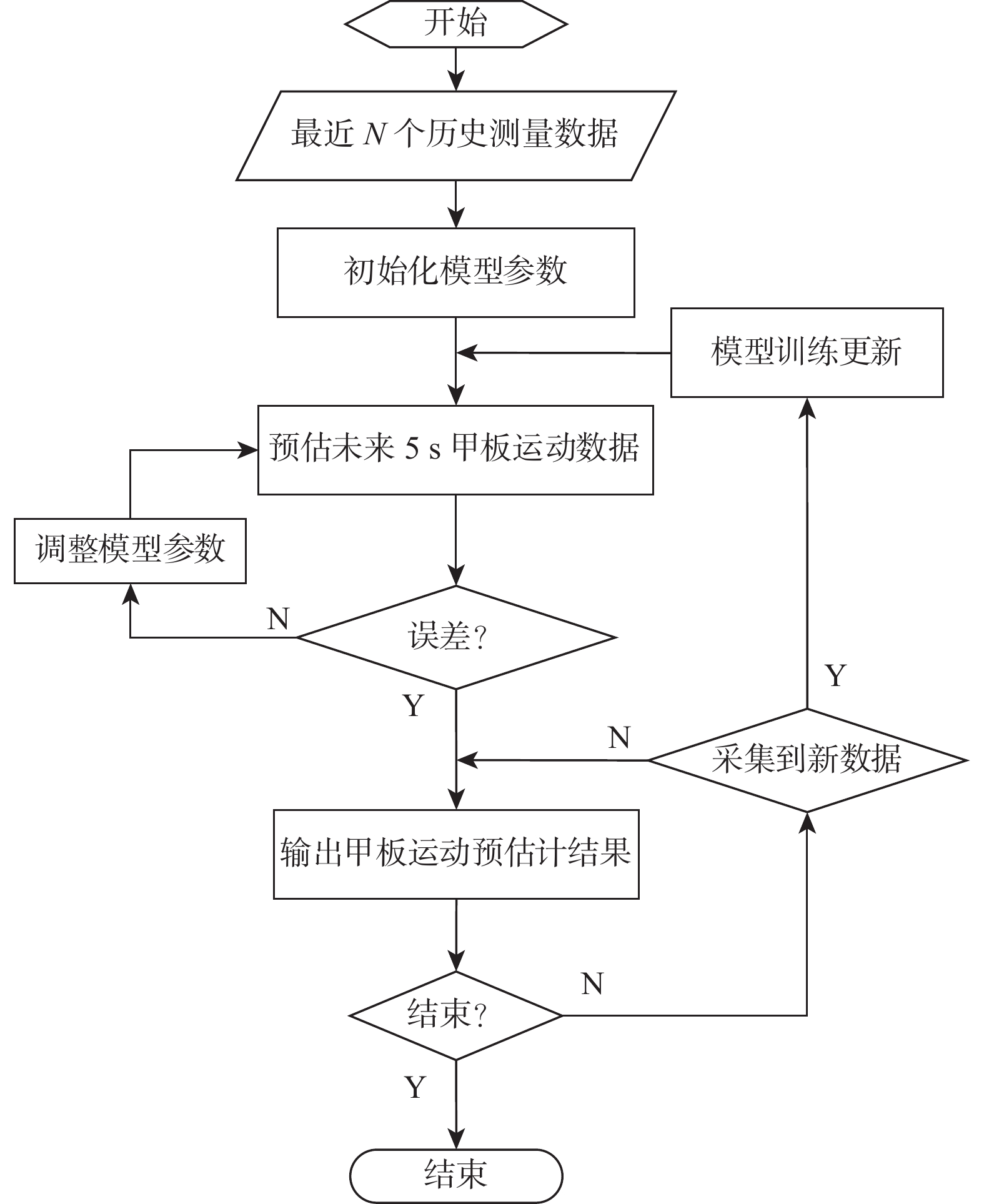
在全自动着舰过程中,考虑甲板运动对全自动着舰成功率的影响。针对舰载机响应滞后带来的甲板和舰载机纵向高度不同步的问题,采用甲板运动预报技术对舰船未来有效时间内的运动参数进行预报。建立基于正弦波组合的六自由度甲板运动模型,基于反向传播(BP)人工神经网络建立甲板运动预报模型,提出采用反向传播优化算法减小预报模型训练更新时间,提高预报模型速率和精度。基于超前网络建立甲板运动补偿模型,结合着舰导引系统确保舰载机与甲板运动同相位。建立飞机运动模型,并通过仿真实验,验证甲板运动预报和补偿技术的可行性。
Abstract:The impact of deck motion on the complete automatic landing success rate is taken into account during the landing procedure. Aiming at the asynchrony of the deck and the longitudinal height of the carrier-based aircraft caused by the delay in the response of the carrier-based aircraft, the deck motion prediction technology is used to forecast the motion parameters of the ship in the effective time in the future. A six-degree-of-freedom deck motion model based on sine wave combination is established, and a deck motion prediction model is established based on a back-propagation (BP) artificial neural network. A deck motion compensation model is developed in accordance with the advance network, and the landing guidance system is integrated to guarantee that the vector of the deck and the carrier aircraft are in synchronization. The aircraft motion model is established, and the feasibility of the deck motion prediction and compensation technology is verified through the simulation experiments.
-
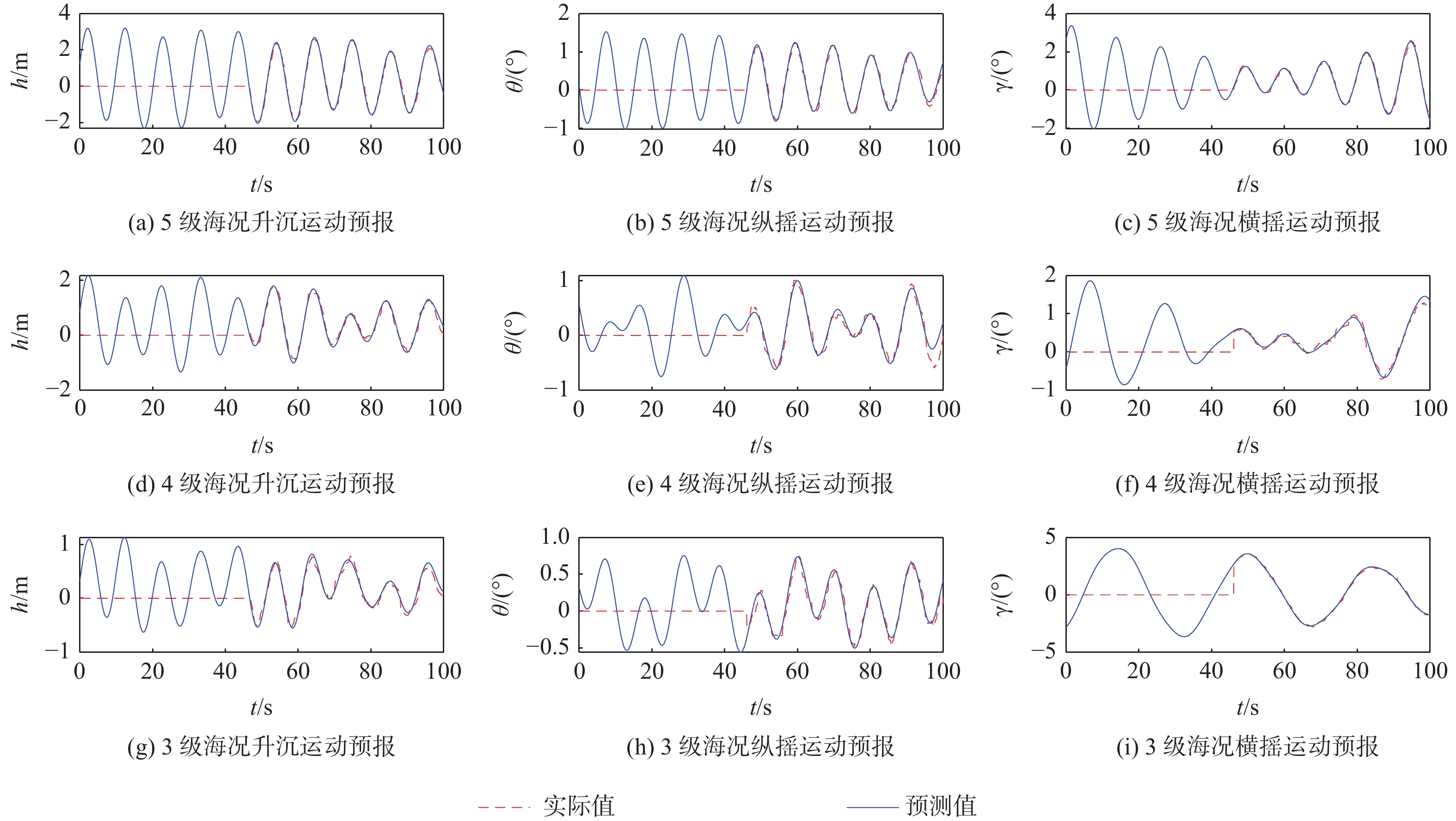
图 7 本文预报模型在不同海况下的仿真结果
Figure 7. Simulation results of the proposed predicting model under different sea conditions
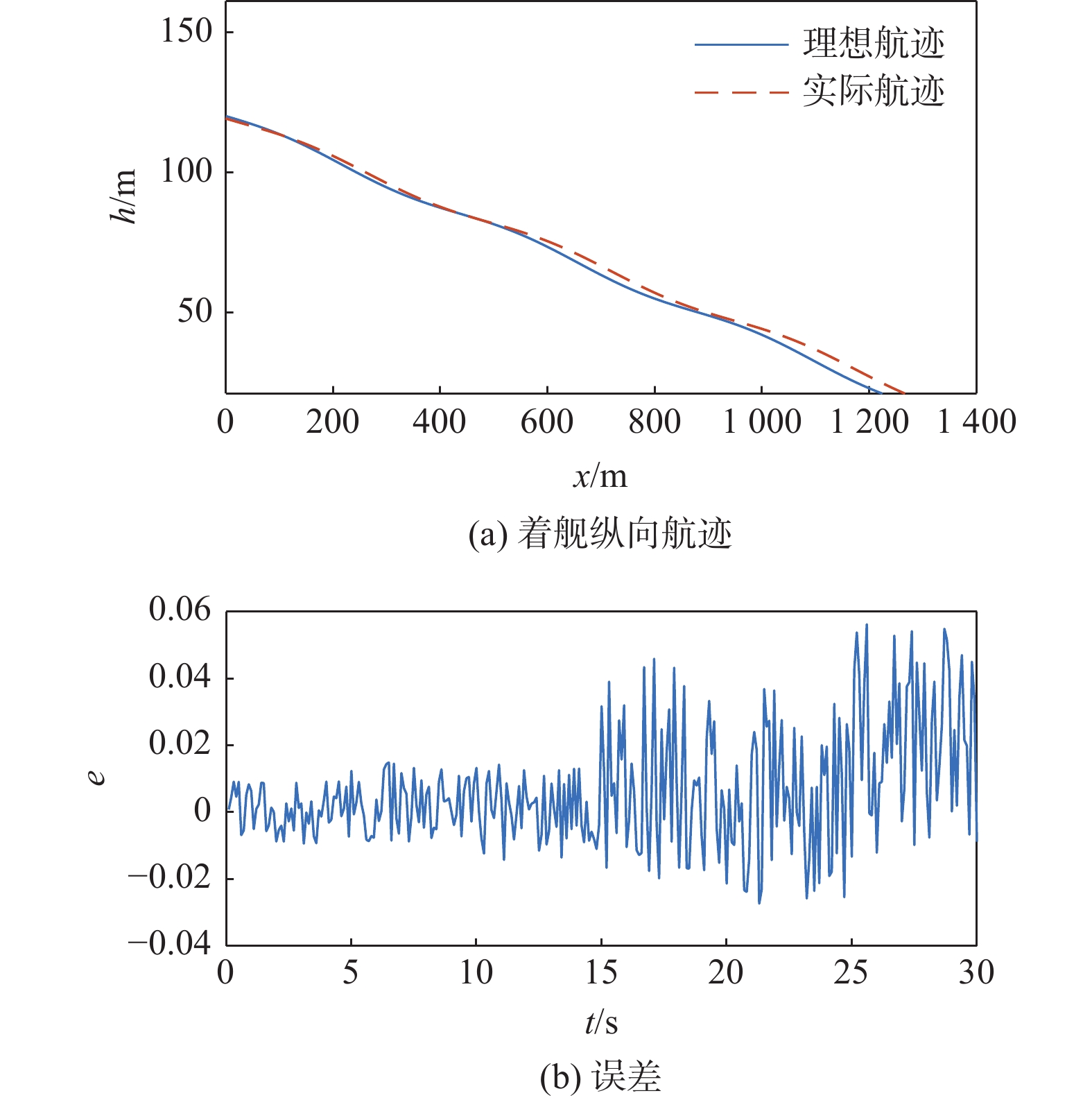
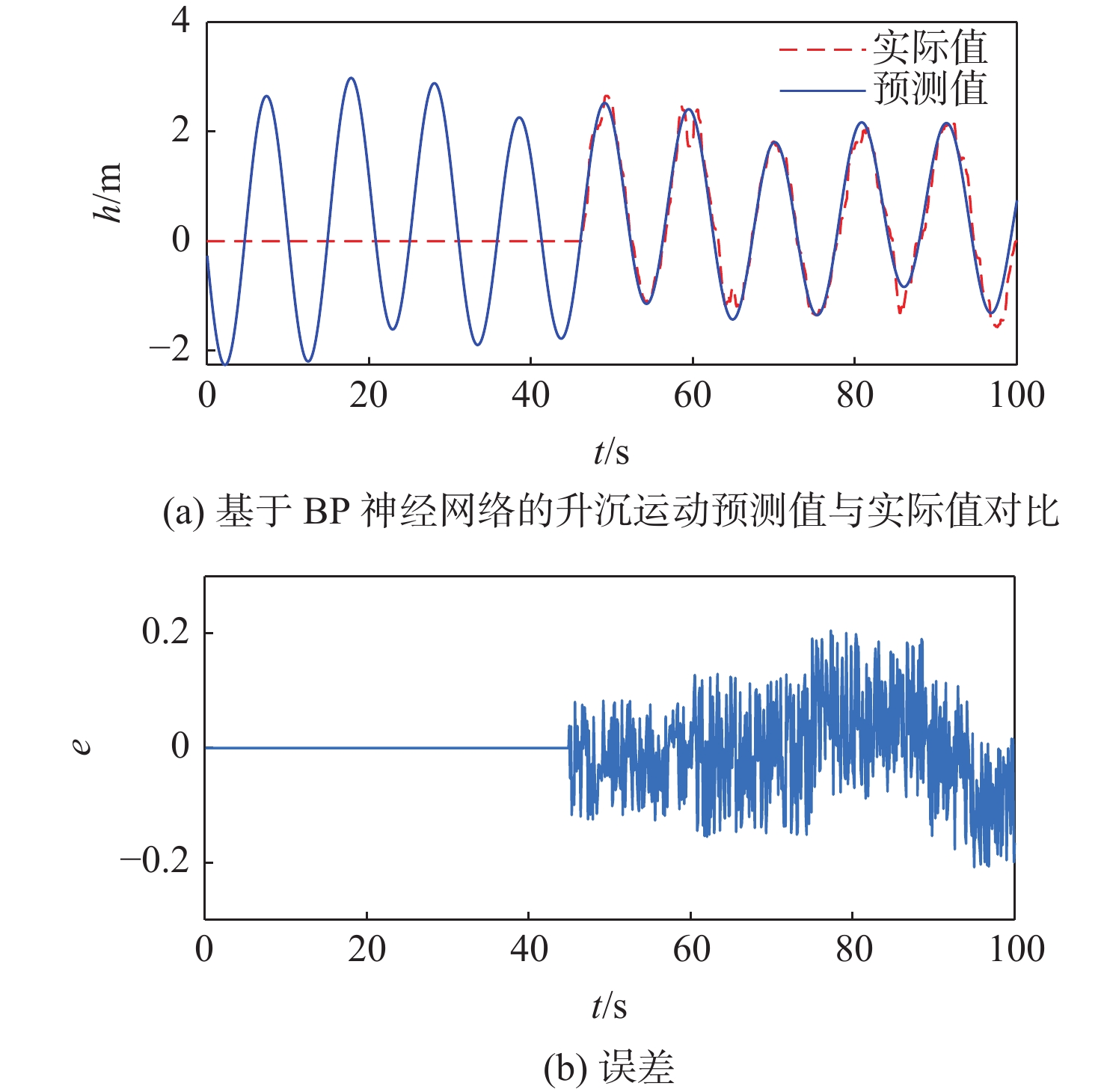
图 12 基于经典BP预报技术的舰载机纵向着舰航迹
Figure 12. Longitudinal landing track of carrier aircraft based on classical BP prediction technology
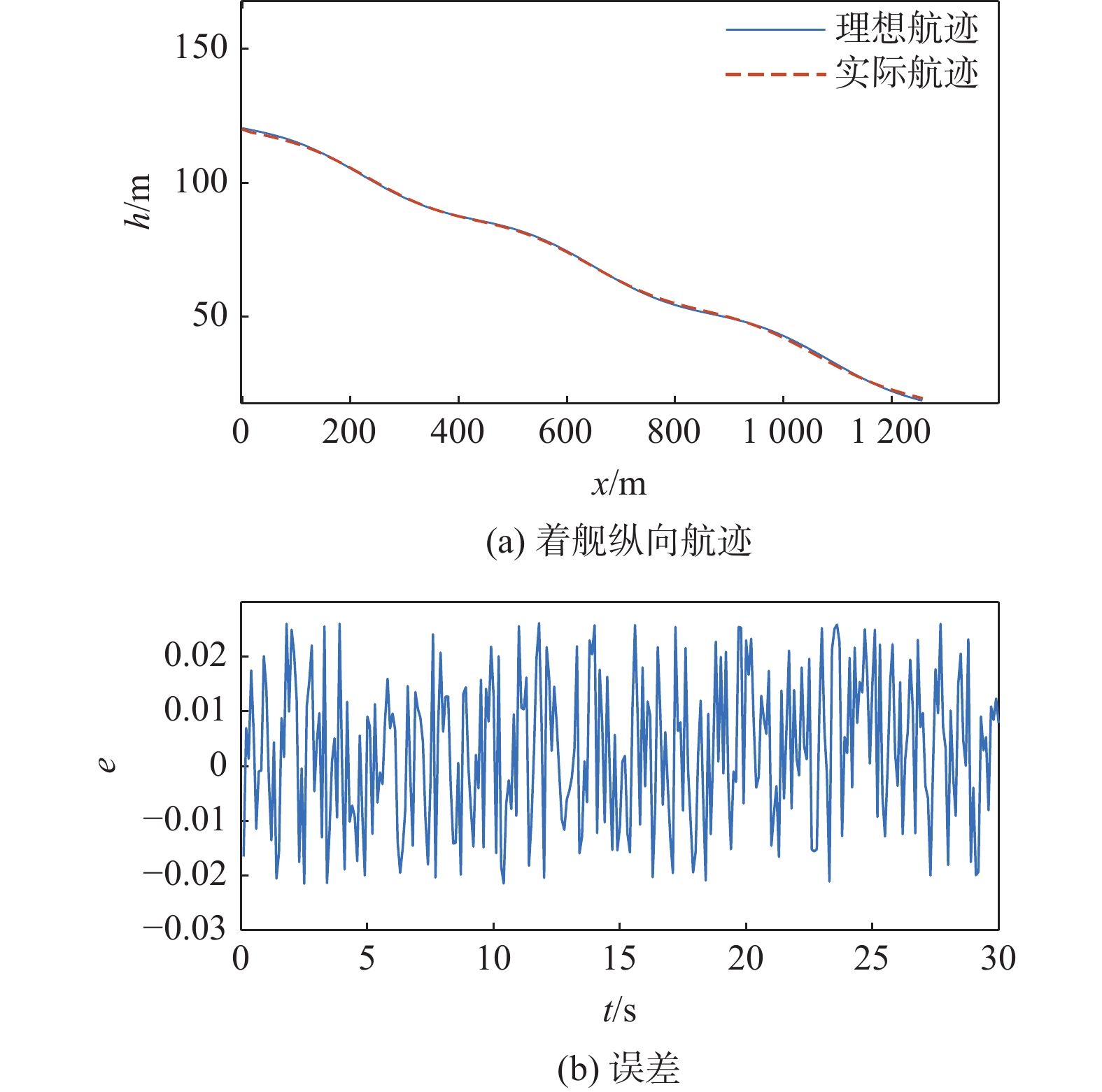
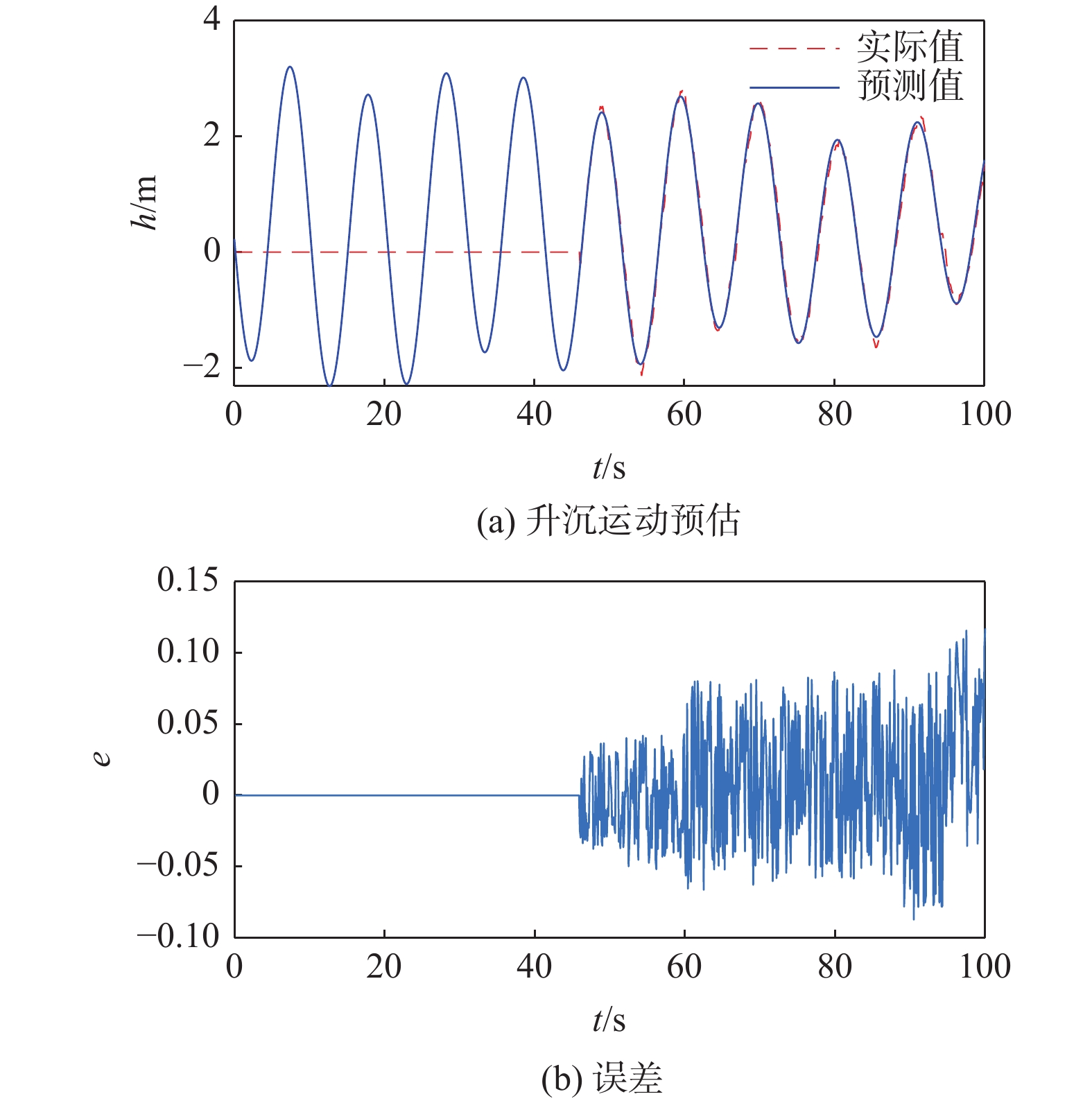
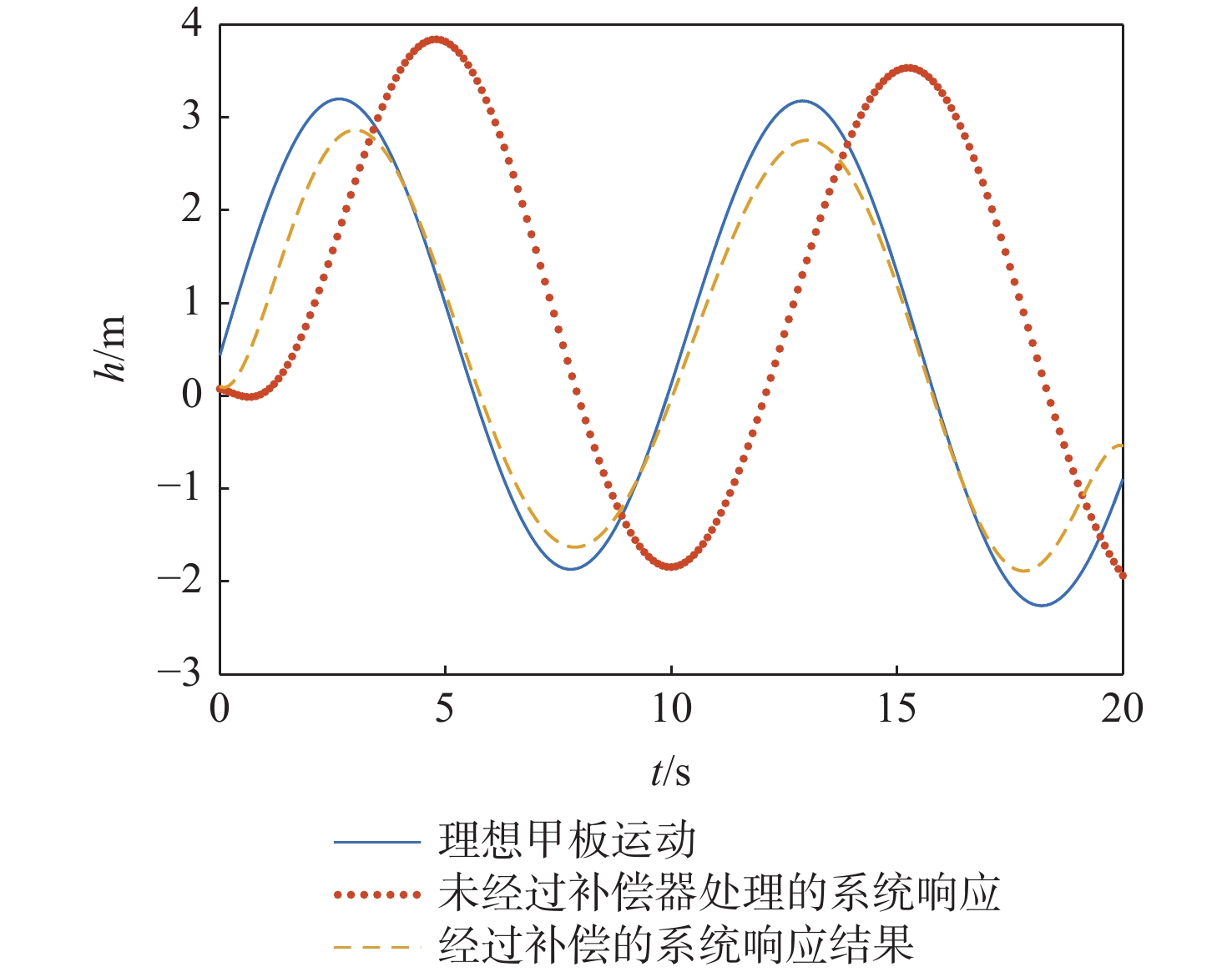
图 13 本文预报模型的舰载机纵向着舰航迹
Figure 13. Longitudinal landing track of carrier aircraft based on the proposed predicting model
表 1 甲板运动预报性能
Table 1. Deck motion prediction performances
时间/s 升沉MSE/m 纵摇MSE/(°) 横摇MSE/(°) 4 0.024875 0.025589 0.029882 7 0.023695 0.036056 0.027329 10 0.029782 0.039349 0.043956 13 0.06856 0.076037 0.077719 16 0.089719 0.09724 0.095743 19 0.12533 0.14659 0.131588  下载: 导出CSV
下载: 导出CSV
表 2 舰载机瞬时状态
Table 2. Transient state parameters of carrier aircraft
参数 数值 参数 数值 高度h/m 120 偏航角速度r/((°)·s−1) 0 速度V/(m·s−1) 65.0 滚转角速度p/((°)·s−1) 0 迎角α/(°) 8 俯仰角速度q/((°)·s−1) 0 侧滑角β/(°) 0 升降舵偏角δe/(°) −3.17 俯仰角θf/(°) 5 副翼偏角δa/(°) 0 偏航角ψ/(°) 0 油门开合度δT/% 0.43 滚转角ϕ/(°) 0 方向舵偏角δr/(°) 0
下载: 导出CSV
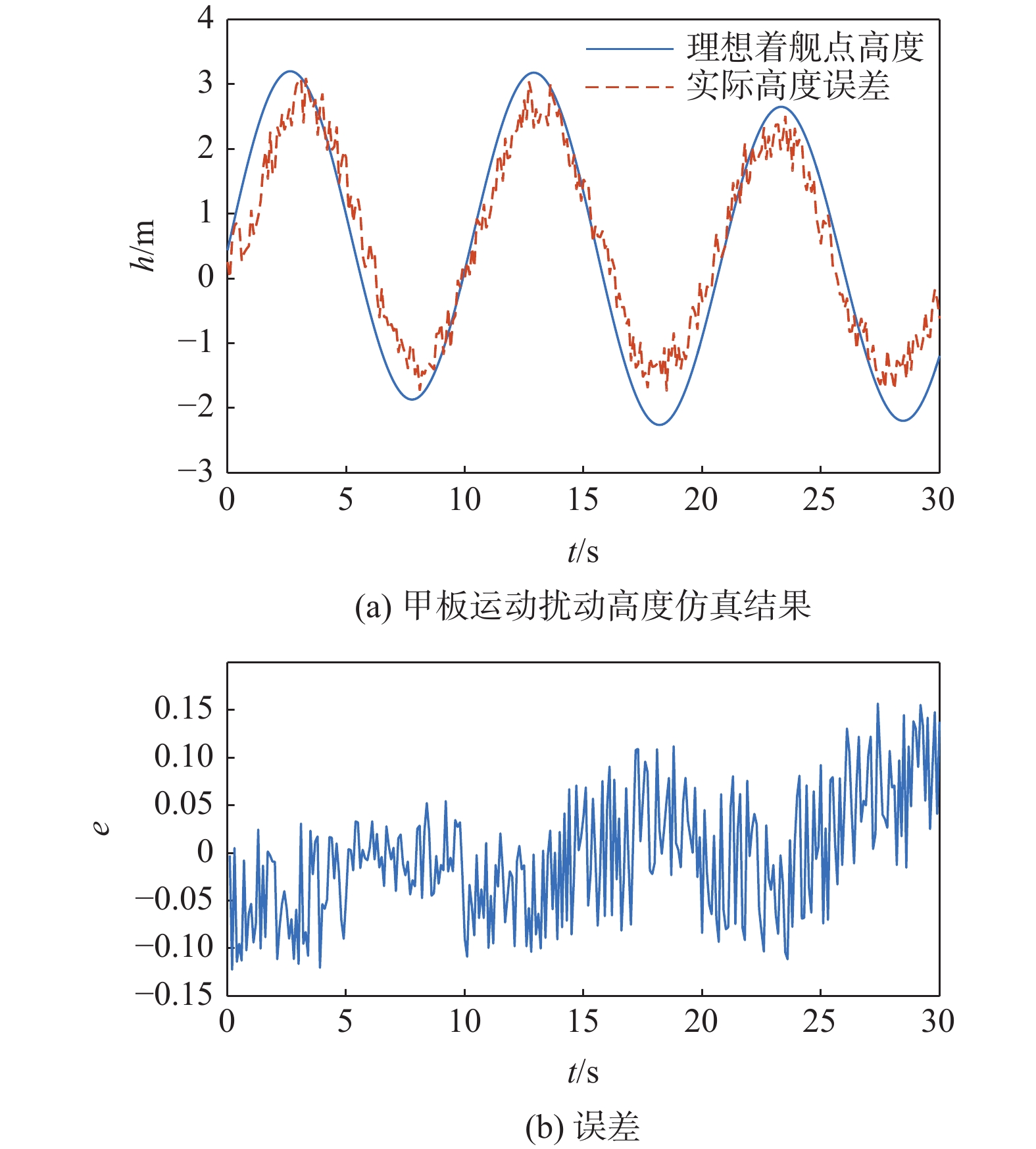
表 3 不同海况下纵向甲板运动扰动实验结果
Table 3. Experimental results of longitudinal deck motion disturbance under different sea conditions
海况 高度平均误差/m 高度误差标准差/m 5级 0.460 34 3.613 54 4级 0.376 16 4.510 79 3级 0.393 52 4.014 54
下载: 导出CSV
-
[1] 武恒州, 罗福平, 石星辰, 等. 全自动着舰技术现状与发展趋势分析[J]. 飞机设计, 2020, 40(6): 1-5.WU H Z, LUO F P, SHI X C, et al. Analysis on the status quo and development trend of automatic carrier landing technology[J]. Aircraft Design, 2020, 40(6): 1-5(in Chinese). [2] 杨一栋. 直升机飞行控制[M]. 北京: 国防工业出版社, 2007: 37-70.YANG Y D. Helicopter flight control[M]. Beijing: National Defense Industry Press, 2007: 37-70(in Chinese). [3] 许东松, 刘星宇, 王立新. 航母运动对舰载飞机着舰安全性的影响[J]. 北京航空航天大学学报, 2011, 37(3): 289-294.XU D S, LIU X Y, WANG L X. Influence of carrier motion on landing safety for carrier-based airplanes[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(3): 289-294(in Chinese). [4] 王可, 徐明亮, 李亚飞, 等. 一种面向航空母舰甲板运动状态预估的鲁棒学习模型[J]. 自动化学报, 2021, 48: 1-9.WANG K, XU M L, LI Y F, et al. A robust learning model for deck motion prediction of aircraft carrier[J]. Acta Automatica Sinica, 2021, 48: 1-9(in Chinese). [5] 杨柳, 徐东昊. 基于极短期运动预报的舰载机着舰过程仿真分析[J]. 中国舰船研究, 2018, 13(4): 99-103.YANG L, XU D H. Aircraft carrier landing process simulation based on extremely short-term prediction of ship motion[J]. Chinese Journal of Ship Research, 2018, 13(4): 99-103(in Chinese). [6] LI X L, LV X H, YU J D, et al. Neural network application on ship motion prediction[C]//Proceedings of the International Conference on Intelligent Human-Machine Systems and Cybernetics. Piscataway: IEEE Press, 2017: 414-417. [7] 王月春, 张素珍, 孙宁. 六自由度舰船运动轨迹跟踪算法分析[J]. 舰船科学技术, 2022, 44(8): 56-59. doi: 10.3404/j.issn.1672-7649.2022.08.011WANG Y C, ZHANG S Z, SUN N. Analysis on tracking algorithm of 6-DOF ship motion trajectory[J]. Ship Science and Technology, 2022, 44(8): 56-59(in Chinese). doi: 10.3404/j.issn.1672-7649.2022.08.011 [8] RUMELHART D E, HINTON G E, WILLIAMS R J. Learning representations by back-propagating errors[J]. Nature, 1986, 323(6088): 533-536. doi: 10.1038/323533a0 [9] 石广军, 张旸, 王青林. 舰船甲板运动预估技术研究[J]. 直升机技术, 2020(4): 20-24. doi: 10.3969/j.issn.1673-1220.2020.04.005SHI G J, ZHANG Y, WANG Q L. Prediction technology for ship deck motion[J]. Helicopter Technique, 2020(4): 20-24(in Chinese). doi: 10.3969/j.issn.1673-1220.2020.04.005 [10] 吴鹏飞, 石章松, 吴中红, 等. 无人直升机着舰甲板运动预估与补偿方法[J]. 电光与控制, 2019, 26(12): 22-27. doi: 10.3969/j.issn.1671-637X.2019.12.005WU P F, SHI Z S, WU Z H, et al. An estimation and compensation method of deck motion for unmanned helicopter landing on ship[J]. Electronics Optics & Control, 2019, 26(12): 22-27(in Chinese). doi: 10.3969/j.issn.1671-637X.2019.12.005 [11] 张永花. 舰载机着舰过程甲板运动建模及补偿技术研究[D]. 南京: 南京航空航天大学, 2012: 32-50.ZHANG Y H. Research on deck motion modeling and deck motion compensation for carrier landing[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012: 32-50(in Chinese). [12] 张明廉, 徐军. 舰载飞机自动着舰系统的研究[J]. 北京航空航天大学学报, 1994, 20(4): 386-391.ZHANG M L, XU J. Research on automatic landing system of carrier-based aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 1994, 20(4): 386-391(in Chinese). [13] 潘海飞, 王欣, 沙峰. 舰载机着舰过程中甲板运动补偿技术研究[J]. 信息技术, 2013, 37(4): 116-120. doi: 10.3969/j.issn.1009-2552.2013.04.032PAN H F, WANG X, SHA F. Study on the deck motion compensation technique during carrier aircraft landing[J]. Information Technology, 2013, 37(4): 116-120(in Chinese). doi: 10.3969/j.issn.1009-2552.2013.04.032 [14] URNES J M, HESS R K. Development of the F/A-18A automatic carrier landing system[J]. Journal of Guidance, Control, and Dynamics, 1985, 8(3): 289-295. doi: 10.2514/3.19978 [15] ANDERSON M R. Inter and outer loop manual control of carrier aircraft landing[C]//Proceedings of the AIAA, Guidance, Navigation, and Control Conference. San Diego: AIAA, 1996. 期刊类型引用(1)
1. 李君恩,丁天明,韩喜红,刘虎. 基于改进麻雀搜索算法的USV路径规划. 舰船科学技术. 2025(05): 153-158 .  百度学术
百度学术其他类型引用(1)
-

 下载:
下载:

 百度学术
百度学术
 点击查看大图
点击查看大图

计量
- 文章访问数: 788
- HTML全文浏览量: 128
- PDF下载量: 19
- 被引次数: 2
