



-
摘要:
空间飞网系统捕获带有自旋的空间碎片后,碎片会对捕获网与卫星间的连接绳施加扭矩,而目前绳索相关动力学模型无法完整描述其扭转行为。基于集中质量法,对绳索进行二次离散,建立了可以描述绳索扭转行为的动力学模型。通过与传统绳索动力学模型的对比及扭转实验,验证了该模型能够描述绳索在拉伸、弯曲及扭转载荷下的行为,发现绳索的扭转会产生额外的牵引力。针对飞网展开过程进行了仿真分析与实验,验证该动力学模型适用于飞网系统,并对飞网与空间碎片的组合体进行了仿真分析,发现因为绳索扭转产生的牵引力,会对主体卫星的稳定性产生一定的影响,忽略绳索的扭转行为会降低动力学仿真模型的准确性。
Abstract:Once the space tether-net captures the spinning space debris, a torque will be exerted on the connecting tether between the capture net and the satellite. However, the current tether-related dynamic model can't fully describe its twisting behavior. In order to address this issue, a quadratic discrete model is constructed using the lumped parameter method to accurately depict the twisting behaviors of the tether. Comparison with the traditional dynamic model and a torsional experiment for the tether verify that the quadratic discrete model can describe the responses of the tether subjected to tension, bending or torsion. It is found that the torsion of the tether will produce additional traction. Furthermore, the deployment procedure of the tether-net is subjected to simulation analysis and experimentation, which confirms the suitability of the dynamic model for the tether-net system. The simulated examination of the tether-net and space debris combo reveals that the torsional force generated by the rope's twisting will affect the stability of the primary satellite to some extent. Ignoring the twisting behavior of the tether will reduce the accuracy of the dynamic simulation model.
-
Key words:
- tether dynamics /
- tether-net /
- space debris /
- lumped parameter method /
- multi-body dynamics
-
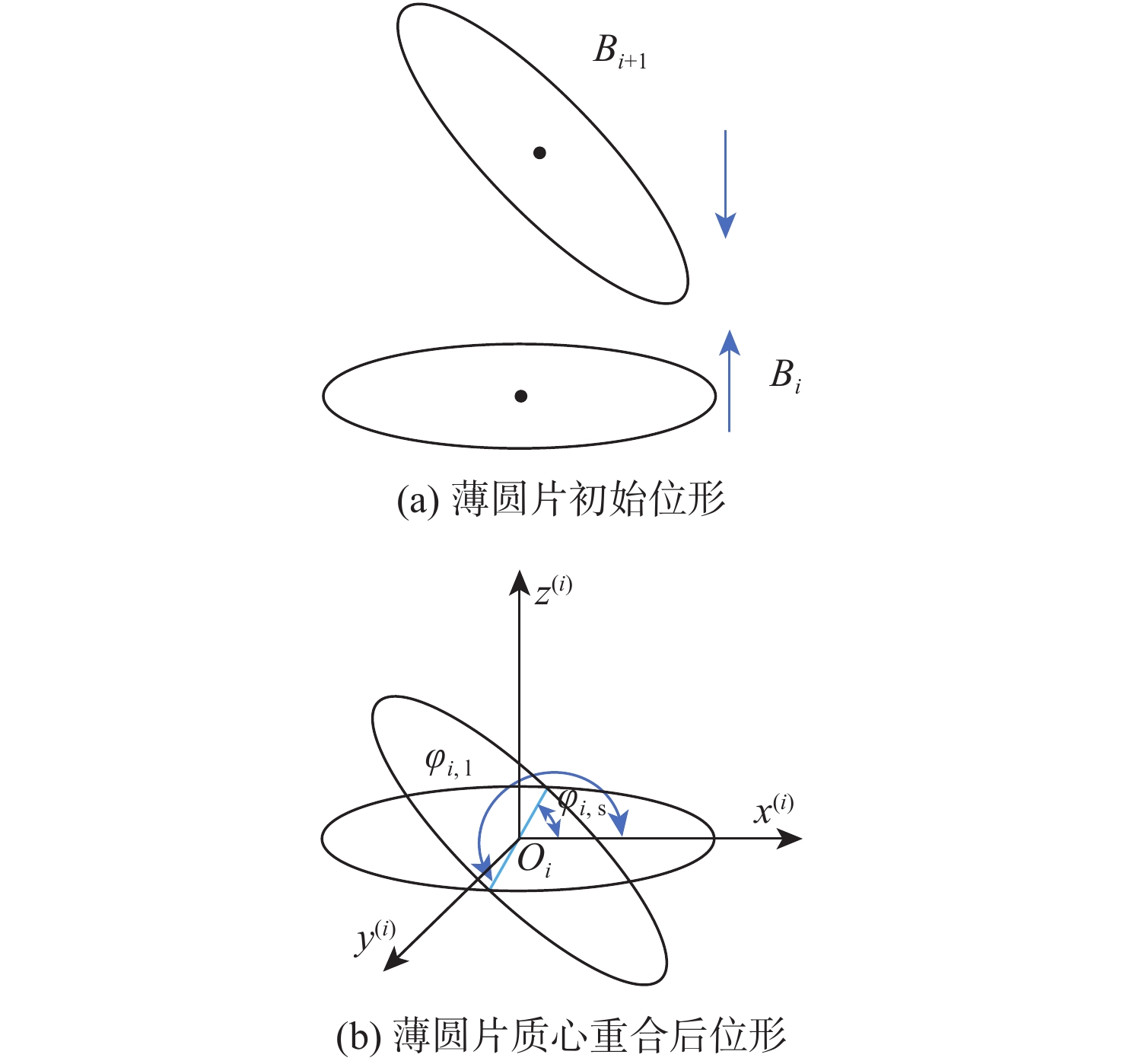
图 5 、及切线示意(蓝色为相交切线)
Figure 5. Schematic about , and tangents (intersecting tangent lines in blue)
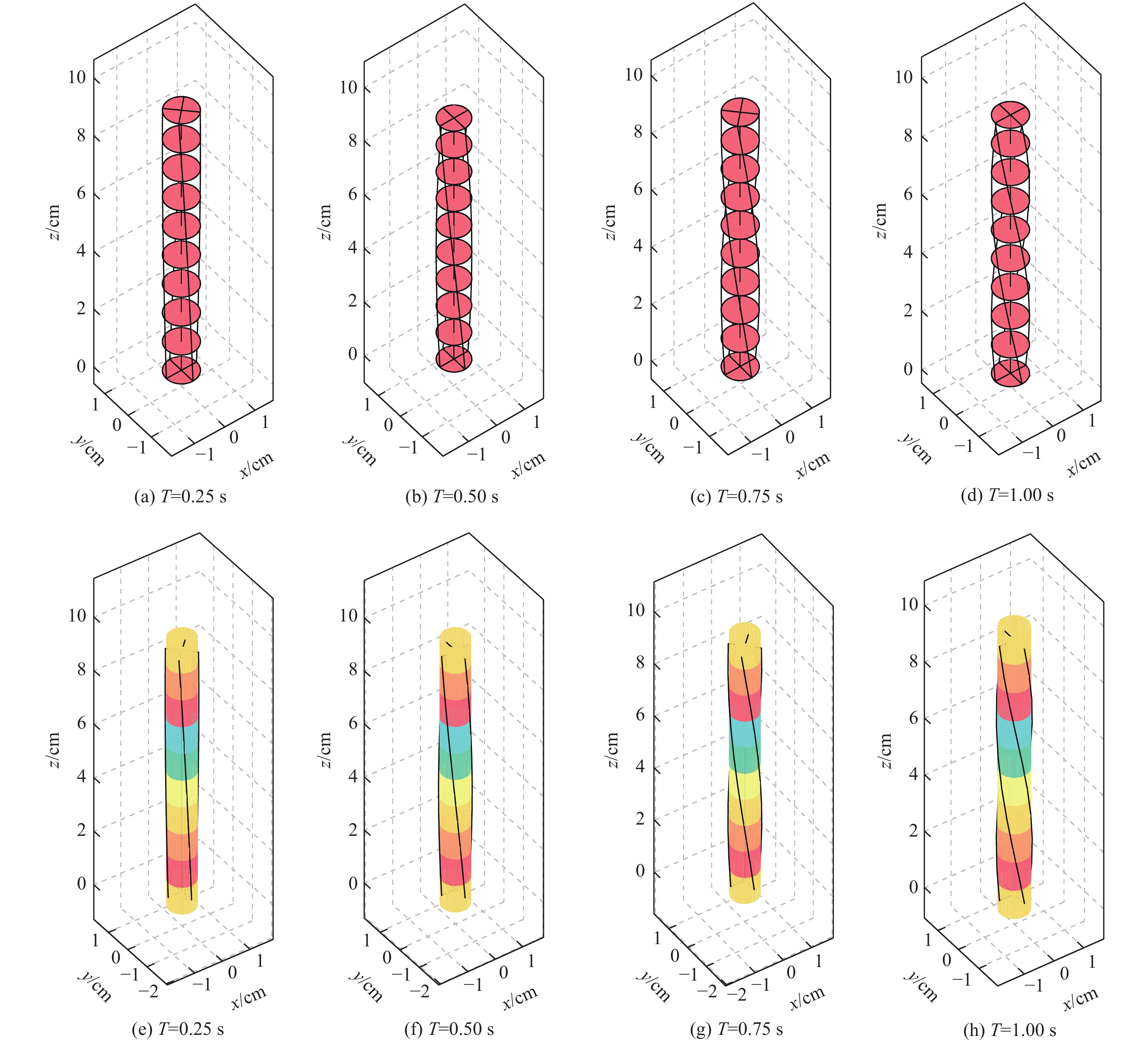
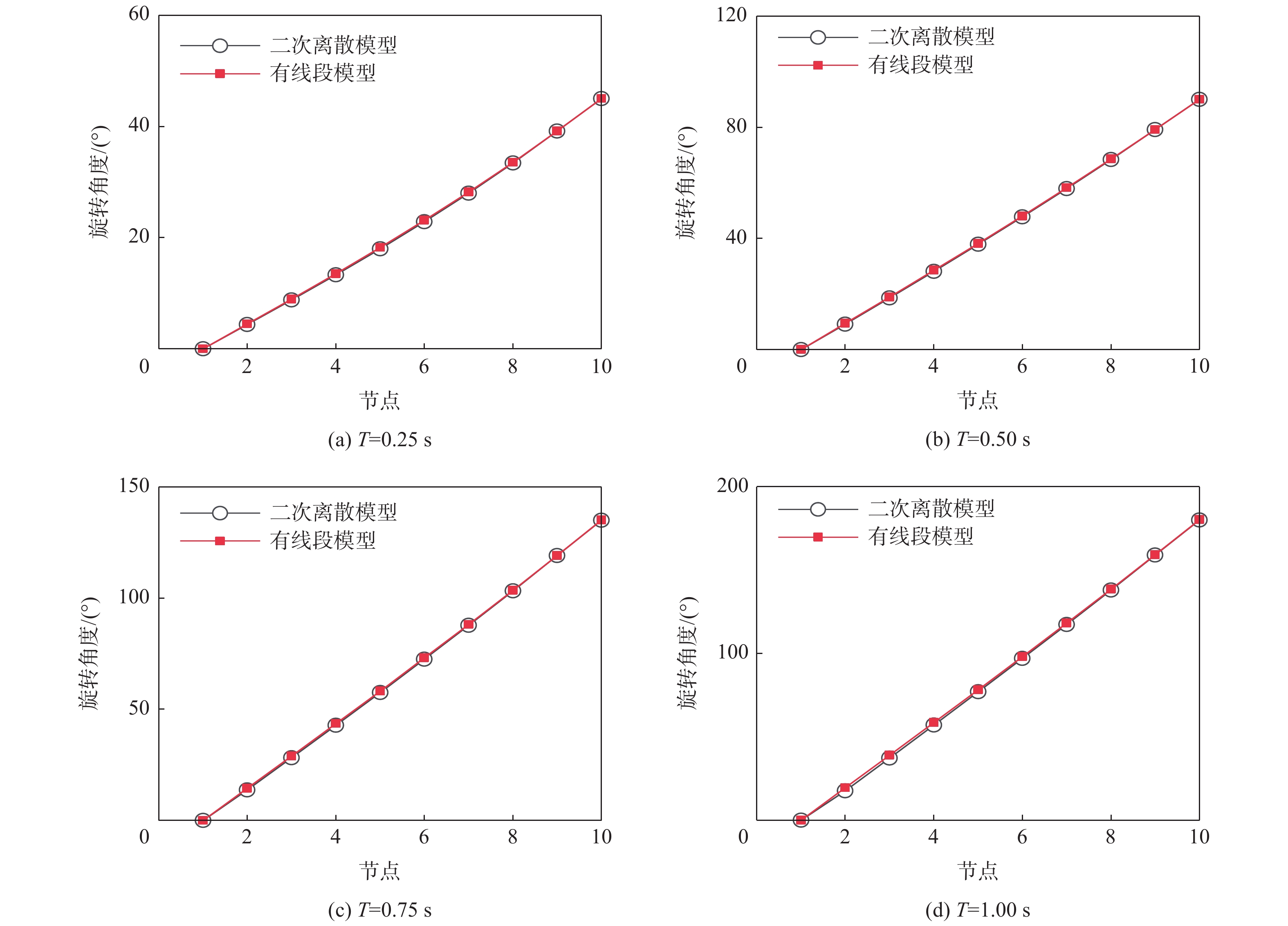
图 8 两种绳索模型对扭转运动的反馈(图(a)~图(d)为二次离散模型,图(e)~图(h)为有限段模型)
Figure 8. Feedback on torsional motion from two rope models (Fig. (a)~Fig. (d) for quadratic discrete model, Fig. (e)~Fig. (h) for model with line segments)
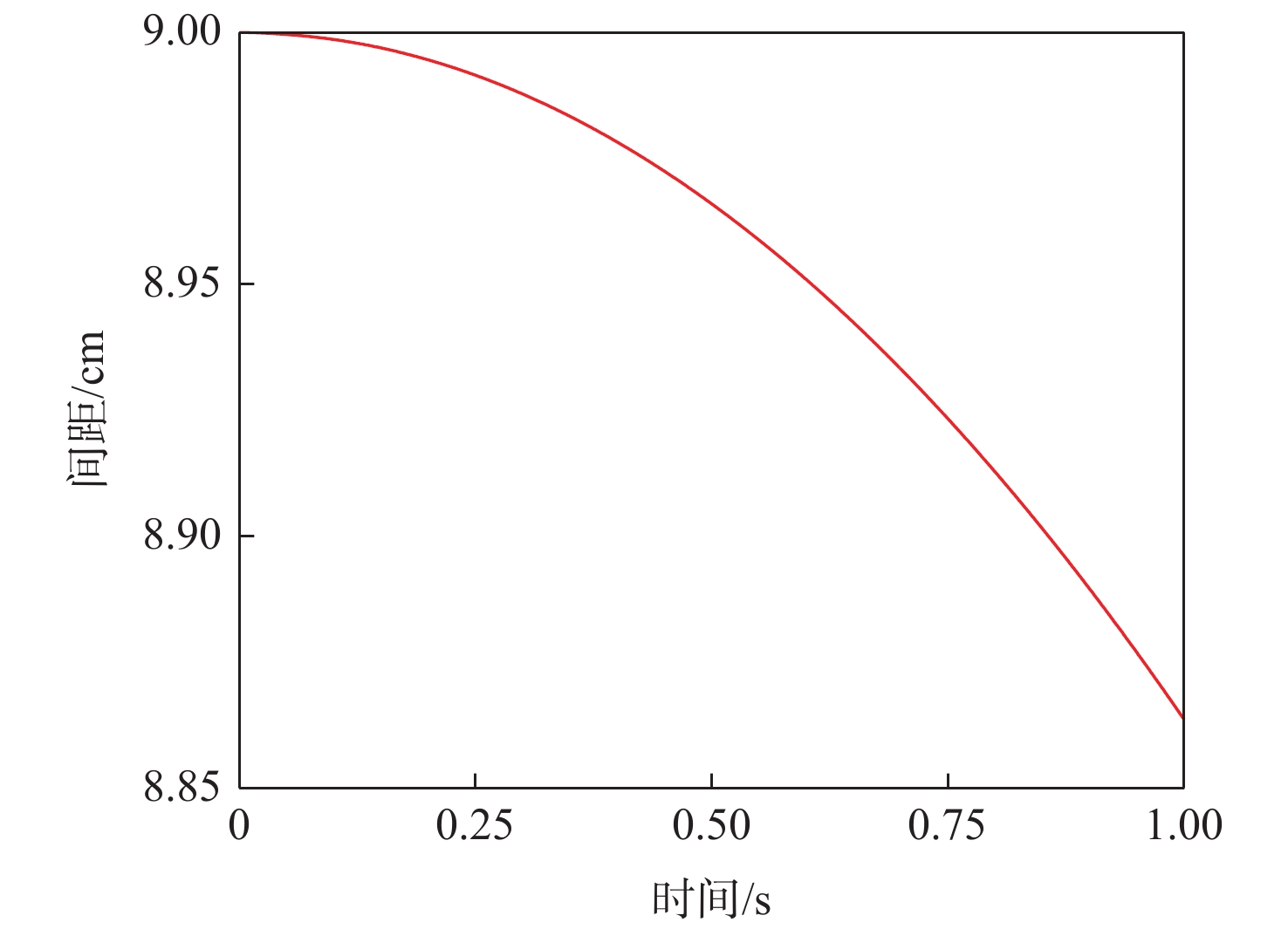
图 10 节点1与节点10的间距随时间变化情况
Figure 10. Distance between node 1 and node 10 varies with time
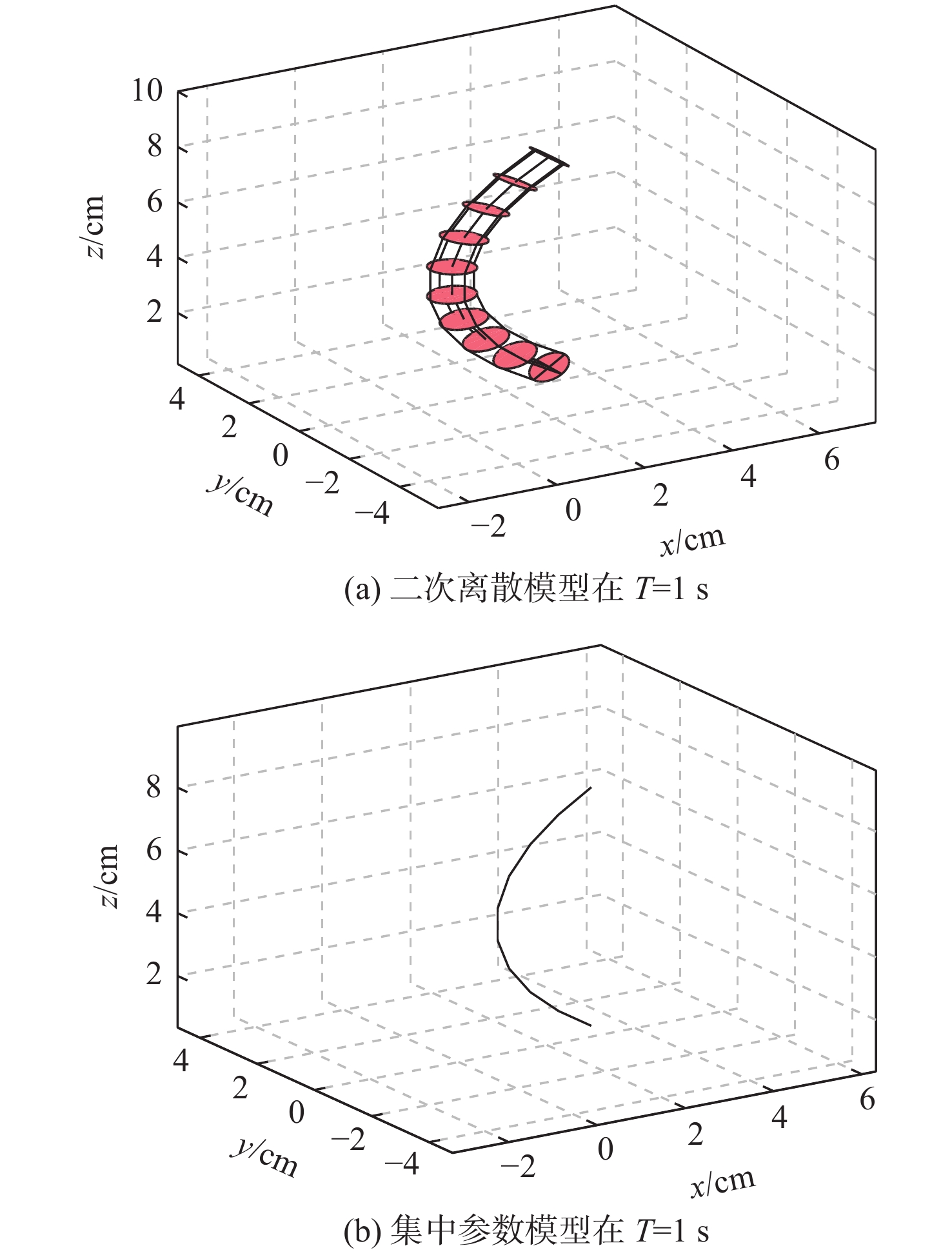
图 12 两种绳索模型受拉伸和弯曲载荷时的反馈
Figure 12. Feedback for tensile and bending loads for two rope models
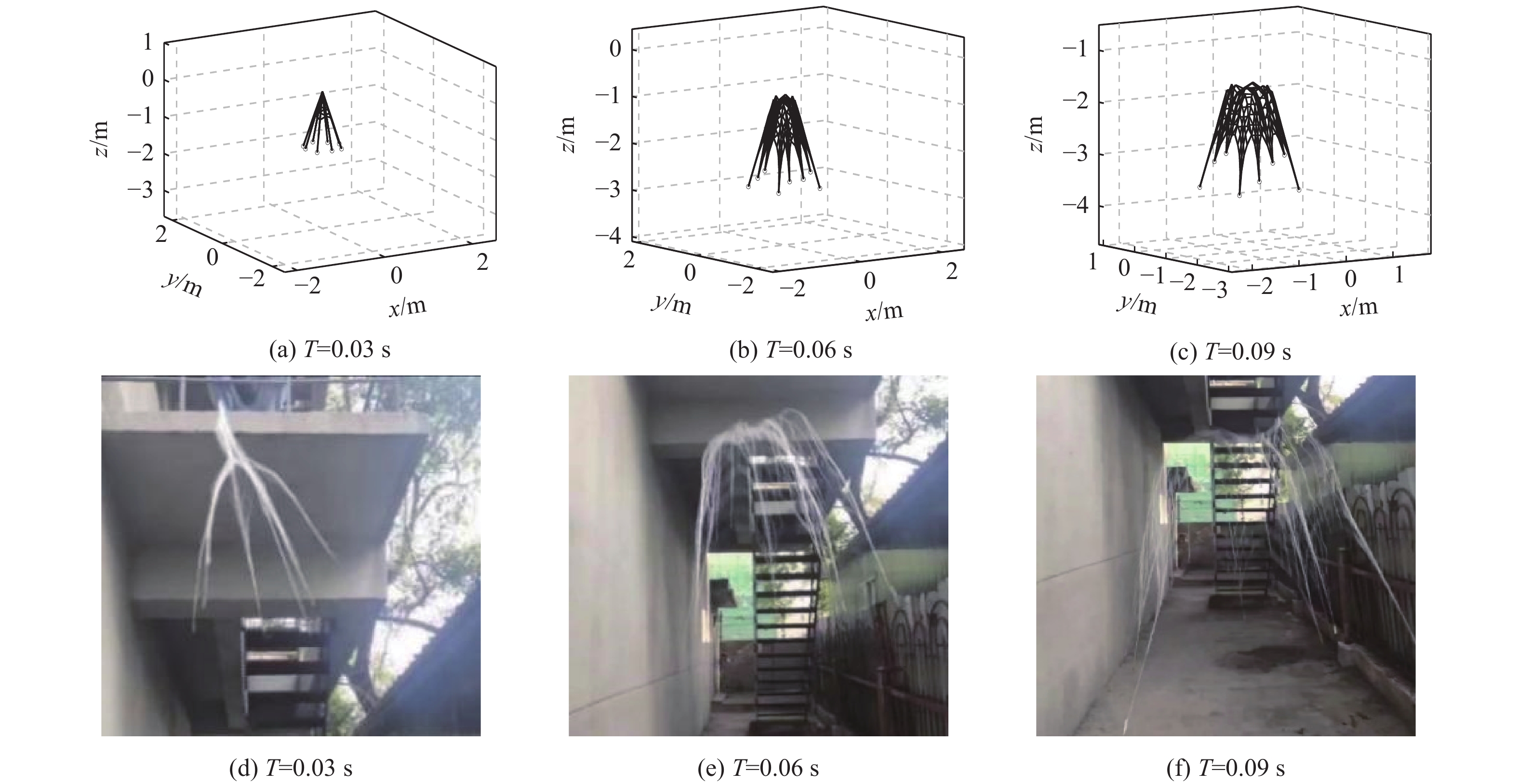
图 14 飞网展开过程仿真与实验对比((a)~(c)为仿真,(d)~(f)为实验)
Figure 14. Comparison between simulation and experiment of tether-net deployment process ((a)~(c) for simulation, (d)~(f) for experiment)
表 1 飞网展开过程仿真参数
Table 1. Simulation parameters of tether-net deployment process
飞网网
体大小/m发射
角度/(°)发射
速度/(m·s−1)牵引块
质量/kg牵引块
数量3×3 30 50 0.3 8  下载: 导出CSV
下载: 导出CSV
表 2 组合体仿真参数
Table 2. Simulation parameters of combination
绳索
材料绳索
直径/cm拖曳物
重量/kg连接绳
长度/cm碎片
转速/尼龙 0.5 2 90 2
下载: 导出CSV
-
[1] KESSLER D J, COUR-PALAIS B G. Collision frequency of artificial satellites: the creation of a debris belt[J]. Journal of Geophysical Research: Space Physics, 1978, 83(A6): 2637-2646. doi: 10.1029/JA083iA06p02637 [2] LIOU J C. An active debris removal parametric study for LEO environment remediation[J]. Advances in Space Research, 2011, 47(11): 1865-1876. doi: 10.1016/j.asr.2011.02.003 [3] FLORES-ABAD A, MA O, PHAM K, et al. A review of space robotics technologies for on-orbit servicing[J]. Progress in Aerospace Sciences, 2014, 68: 1-26. doi: 10.1016/j.paerosci.2014.03.002 [4] AGLIETTI G S, TAYLOR B, FELLOWES S, et al. The active space debris removal mission RemoveDebris. Part 2: in orbit operations[J]. Acta Astronautica, 2020, 168: 310-322. doi: 10.1016/j.actaastro.2019.09.001 [5] BISCHOF B, KERSTEIN L. ROGER-robotic geostationary orbit restorer[C]// 34th COSPAR Scientific Assembly. Florida Miami: NASA Astrobiology Institute General, 2003. [6] AGLIETTI G S, TAYLOR B, FELLOWES S, et al. RemoveDEBRIS: an in-orbit demonstration of technologies for the removal of space debris[J]. The Aeronautical Journal, 2020, 124(1271): 1-23. doi: 10.1017/aer.2019.136 [7] LAVAGNA M, ARMELLIN R, BOMBELLI A, et al. Debris removal mechanism based on thethered nets[C]// International Symposium on Artificial Intelligence. Piedmon Torino: Robotics and Automation in Space, 2012. [8] 陈钦, 杨乐平, 张青斌. 空间飞网发射动力学建模仿真研究与地面试验[J]. 国防科技大学学报, 2009, 31(3): 16-19.CHEN Q, YANG L P, ZHANG Q B. Dynamic model and simulation of orbital net casting and ground test[J]. Journal of National University of Defense Technology, 2009, 31(3): 16-19(in Chinese). [9] SHAN M H, GUO J, GILL E. Deployment dynamics of tethered-net for space debris removal[J]. Acta Astronautica, 2017, 132: 293-302. doi: 10.1016/j.actaastro.2017.01.001 [10] SHABANA A A, YAKOUB R Y. Three dimensional absolute nodal coordinate formulation for beam elements: theory[J]. Journal of Mechanical Design, 2001, 123(4): 606-613. doi: 10.1115/1.1410100 [11] BERZERI M, SHABANA A A. Development of simple models for the elastic forces in the absolute nodal co-ordinate formulation[J]. Journal of Sound Vibration, 2000, 235(4): 539-565. doi: 10.1006/jsvi.1999.2935 [12] OMAR M A, SHABANA A A. A two-dimensional shear deformable beam for large rotation and deformation problems[J]. Journal of Sound Vibration, 2001, 243(3): 565-576. doi: 10.1006/jsvi.2000.3416 [13] STADNYK K, ULRICH S. Validating the deployment of a novel tether design for orbital debris removal[J]. Journal of Spacecraft and Rockets, 2020, 57(6): 1335-1349. doi: 10.2514/1.A34781 [14] BENVENUTO R, LAVAGNA M, CINGOLI A, et al. Multibody dynamics simulation tool to support the GNC design for active debris removal with flexible elements[C]// 9th International ESA Conference on Guidance Navigation and Control Systems. Haute-Garonne Toulouse: European Space Agency, 2014. [15] SI J Y, PANG Z J, DU Z H, et al. Dynamics modeling and simulation of a net closing mechanism for tether-net capture[J/OL]. International Journal of Aerospace Engineering. 2021(2021-08-06)[2022-08-18]. https://doi.org/10.1016/j.asr.2019.08.006. [16] ENDO Y, KOJIMA H, TRIVAILO P M. Study on acceptable offsets of ejected nets from debris center for successful capture of debris[J]. Advances in Space Research, 2020, 66(2): 450-461. doi: 10.1016/j.asr.2020.04.012 [17] ZHANG G B, ZHANG Q B, FENG Z W, et al. A simplified model for fast analysis of the deployment dynamics of tethered-net in space[J]. Advances in Space Research, 2021, 68(4): 1960-1974. doi: 10.1016/j.asr.2021.04.032 [18] 潘冬, 张越, 魏承, 等. 空间大型末端执行器绳索捕获动力学建模与仿真[J]. 振动与冲击, 2015, 34(1): 74-79.PAN D, ZHANG Y, WEI C, et al. Dynamic modeling and simulation on rope capturing by space large end effector[J]. Journal of Vibration and Shock, 2015, 34(1): 74-79(in Chinese). [19] 高庆玉. 空间绳网系统展开动力学与优化设计[D]. 长沙: 国防科技大学, 2017.GAO Q Y. Deployment dynamics and optimization design of space net system[D]. Changsha: National University of Defense Technology, 2017(in Chinese). [20] HOVELL K, ULRICH S. Postcapture dynamics and experimental validation of subtethered space debris[J]. Journal of Guidance Control Dynamics, 2018, 41(2): 519-525. doi: 10.2514/1.G003049 [21] HOU Y S, LIU C, HU H Y, et al. Dynamic computation of a tether-net system capturing a space target via discrete elastic rods and an energy-conserving integrator[J]. Acta Astronautica, 2021, 186: 118-134. doi: 10.1016/j.actaastro.2021.05.029 [22] 张国斌. 新型空间柔性捕获机构动力学研究[D]. 长沙: 国防科技大学, 2018.ZHANG G B. Dynamics of the novel space capture mechanism[D]. Changsha: National University of Defense Technology, 2018(in Chinese). [23] SHAN M, GUO J, GILL E. An analysis of the flexibility modeling of a net for space debris removal[J]. Advances in Space Research, 2020, 65: 1083-1094. doi: 10.1016/j.asr.2019.10.041 [24] GOMEZ N O, WALKER S. Earth’s gravity gradient and eddy currents effects on the rotational dynamics of space[J]. Debris Objects: Envisat Case Study. Advances in Space Research, 2015, 56(3): 494-508. [25] 沈剑, 韩峰, 陈放, 等. 基于绝对节点坐标法的柔性绳索体建模仿真研究[J]. 科学技术与工程, 2016, 16(31): 1-7.SHEN J, HAN F, CHEN F, et al. Modeling and simulation of flexible cable-body by absolute nodal coordinate formulation[J]. Science Technology and Engineering, 2016, 16(31): 1-7(in Chinese). [26] 刘延柱, 潘振宽, 戈新生. 多体系统动力学[M]. 2版. 北京: 高等教育出版社, 2014: 33-48.LIU Y Z, PAN Z K, GE X S. Dynamics of multibody systems[M]. 2nd ed. Beijing: Higher Education Press, 2014: 33-48(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 373
- HTML全文浏览量: 122
- PDF下载量: 21
- 被引次数: 0
