



-
摘要:
车载重力测量沿地球表面实施,其较慢的速度和机动灵活的特点为高精度地面重力测量提供有利条件。传统动基座重力测量严重依赖全球定位系统(GPS)而无法实现完全自主性,基于捷联惯导(SINS)/里程计(OD)/高度计组合导航提出一种新的自主无源车载重力异常测量方法。组合导航系统提供了高精度的比力、姿态和载体加速度信息,气压高度计用于抑制高度通道的发散,通过直接差分法即可实现重力信息的获取;对比了以航位推算位置(SINS/DR) 、里程计速度(SINS/OD) 、位置速度(SINS/DR/OD)为量测和传统SINS/GPS 这4种方法的测量精度,分析量测选择对所提方法测量效果的影响。重复测线仿真及单测线跑车试验结果表明:所提方法可以实现完全自主的车载重力异常测量,相比传统SINS/GPS方法具有普遍的精度优势, SINS/OD与SINS/ DR/OD测量精度相差不大,且优于SINS/DR测量方法。
Abstract:Vehicle gravimetry is carried out along the surface of the earth. Its slow speed and flexible maneuverability can provide favorable conditions for high-precision ground gravimetry. Due to its heavy dependence on the global positioning system (GPS), traditional gravimetry on a moving pedestal cannot achieve complete autonomy. A new autonomous passive method based on strapdown inertial navigation system (SINS)/odometer (OD)/altimeter integrated navigation was proposed to measure vehicle gravity anomaly. The integrated navigation system provided high-precision specific force, attitude, and carrier acceleration. The barometric altimeter was used to suppress the divergence of the altitude channel, and the gravity information could be obtained by the direct difference method. Then, the measurement accuracy of the four methods, namely, position (SINS/DR), velocity (SINS/OD), position velocity (SINS/DR/OD), and traditional SINS/GPS, was compared, and the influence of measurement selection on the measurement effect of the method proposed was analyzed. The results of repeated measurement line simulation and single measurement line vehicle experiment show that the method proposed can achieve fully autonomous vehicle gravity anomaly measurement, and it has general accuracy advantages over the traditional SINS/GPS method. In addition, the SINS/OD and SINS/DR/OD measurement accuracy is not much different and is better than the SINS/DR measurement method.
-
Key words:
- vehicle gravimetry /
- gravity anomaly /
- direct difference method /
- odometer /
- barometric altimeter
-
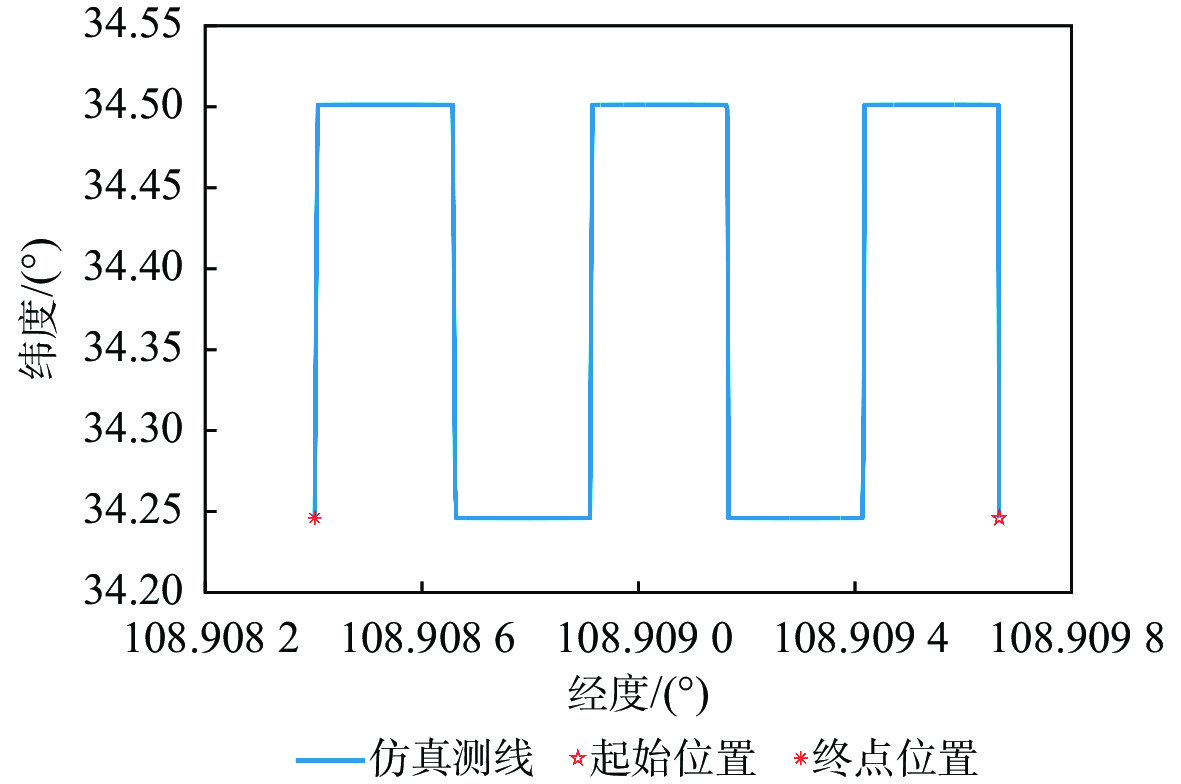
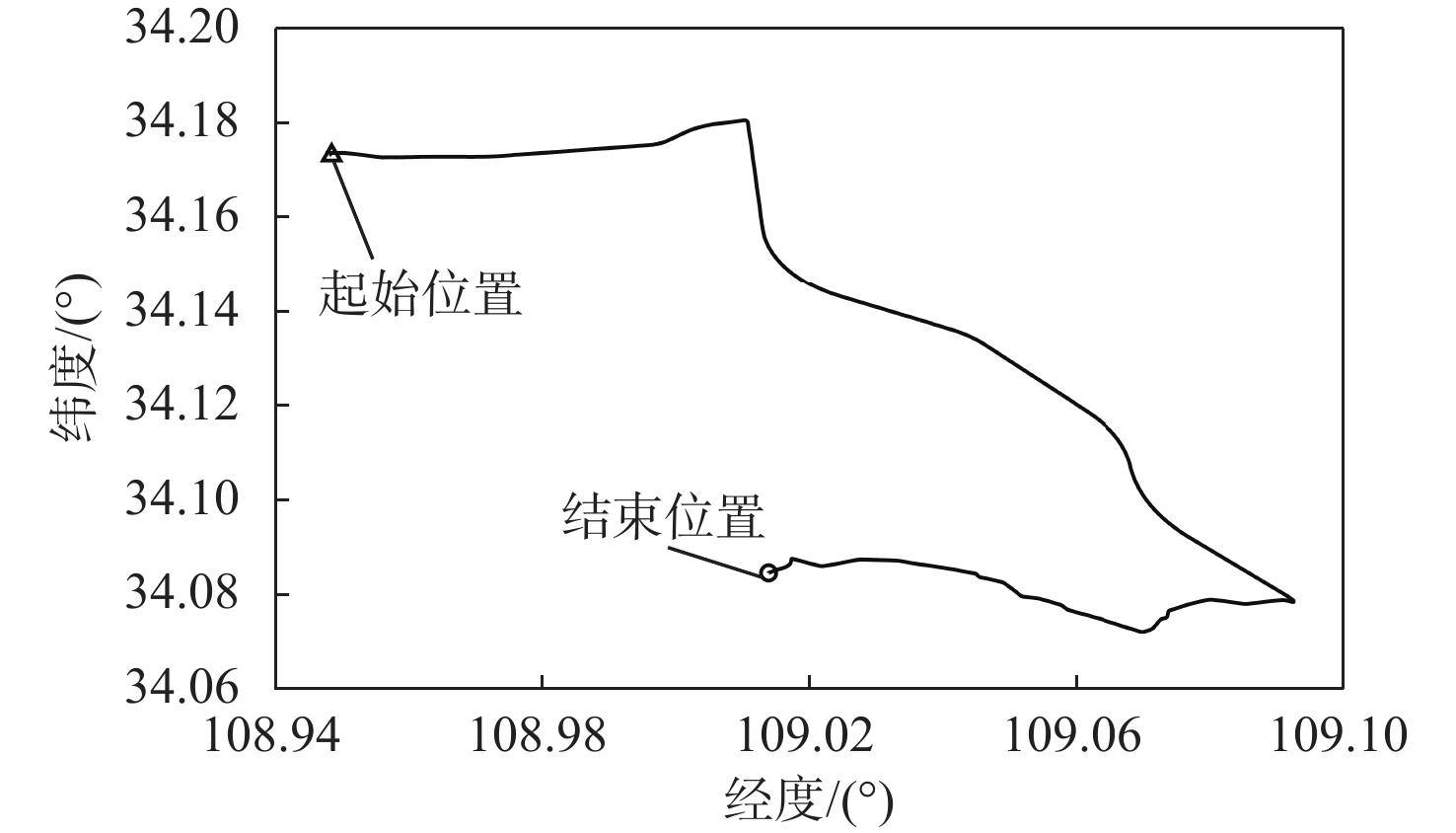
图 2 车载重力测量重复测线仿真轨迹
Figure 2. Simulation track of repeated measurement lines for vehicle gravimetry
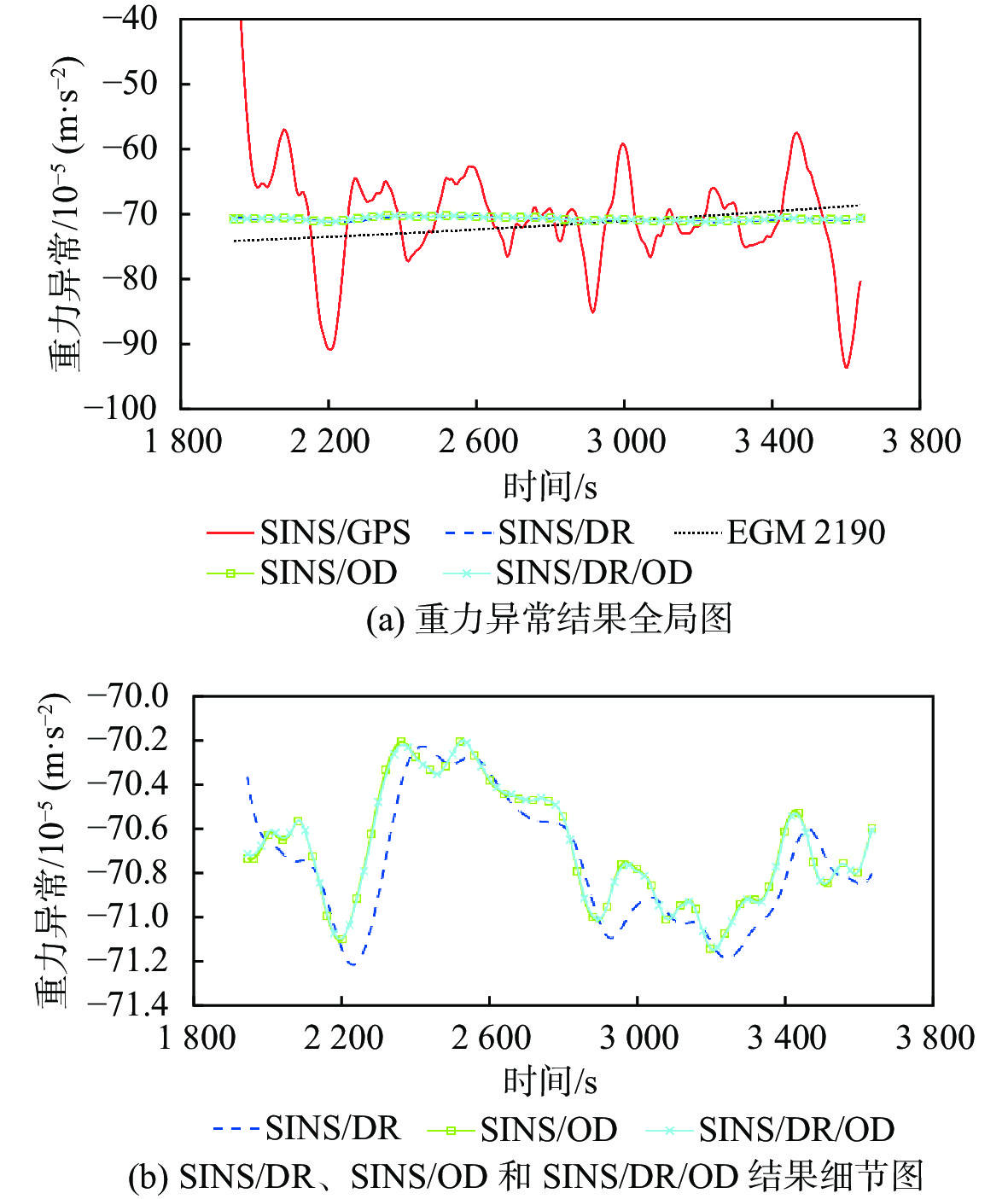
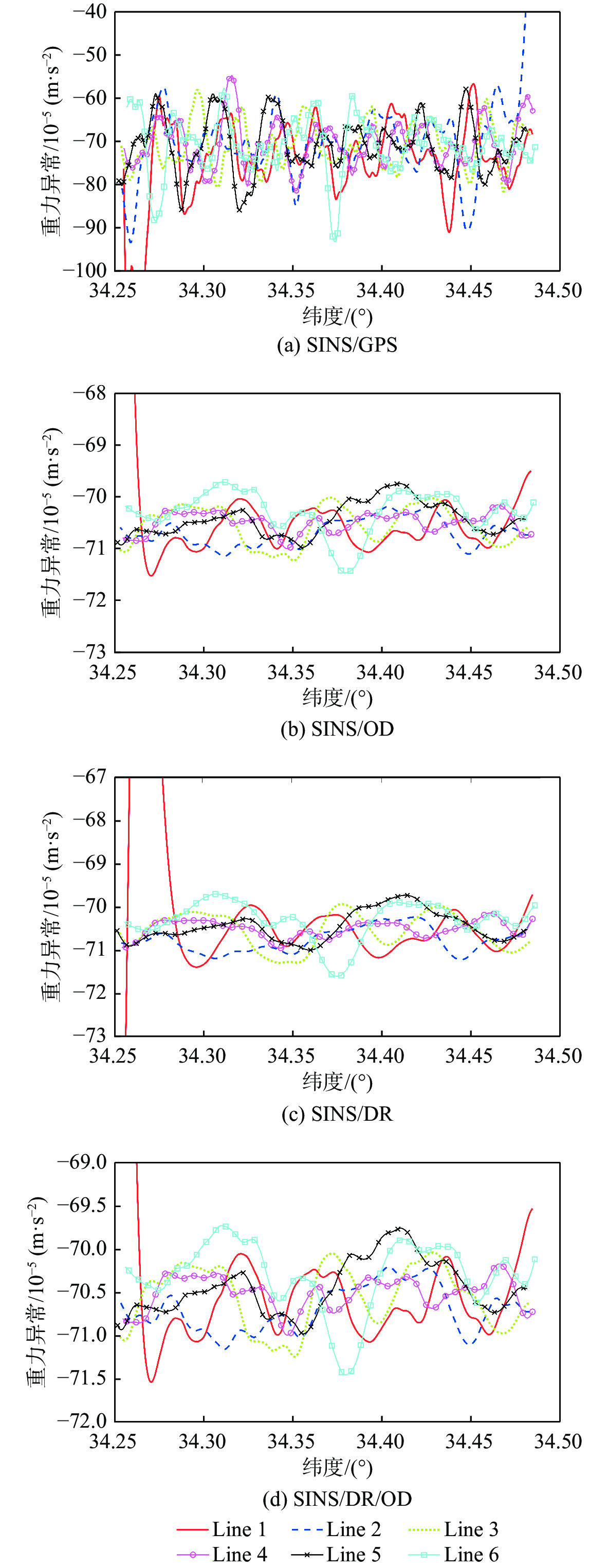
图 6 4种方法重力异常仿真结果对比
Figure 6. Simulation results comparison of gravity anomalies of four methods
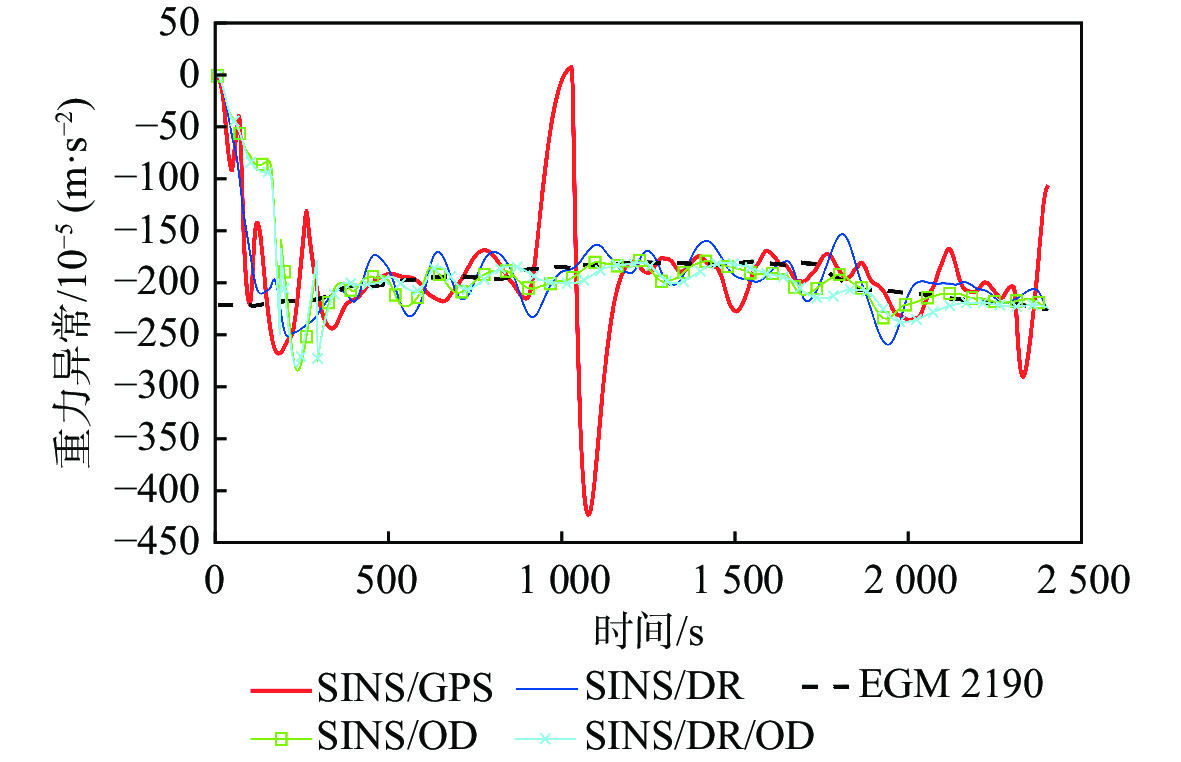
图 10 4种方法重力异常实验结果对比
Figure 10. Experiment results comparison of gravity anomalies of four methods
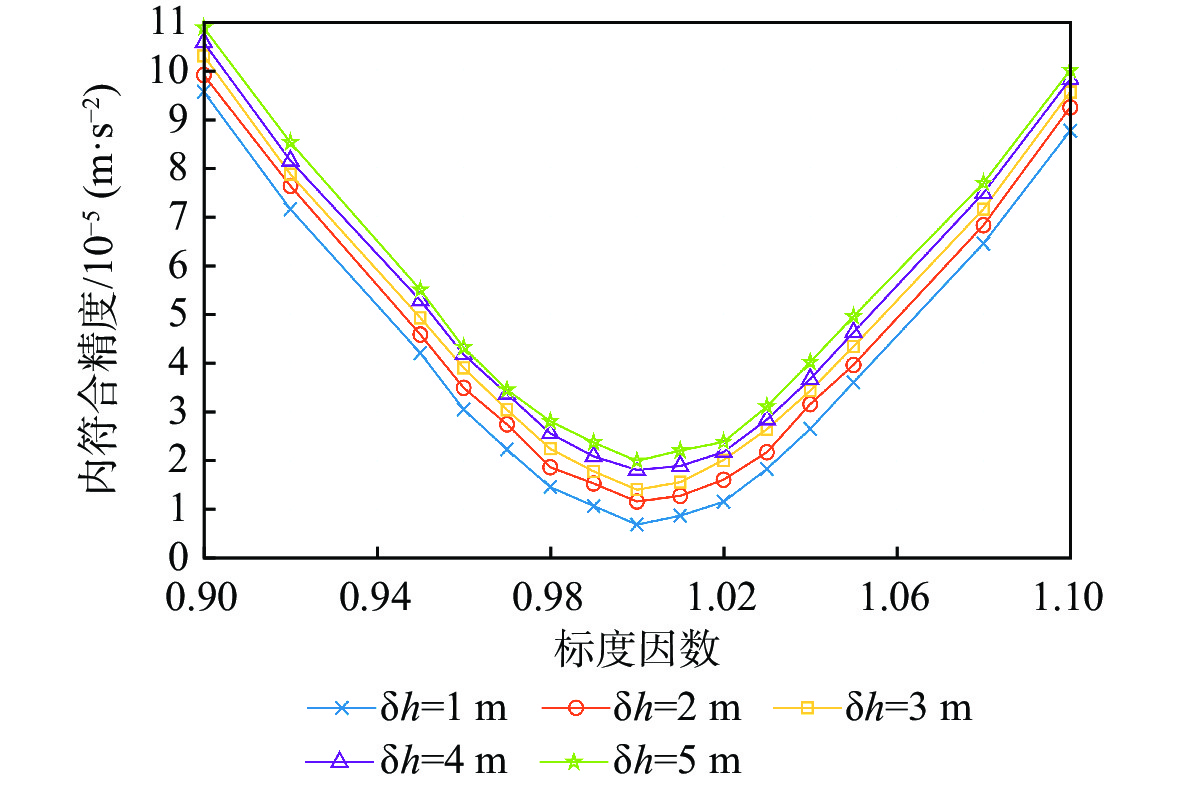
图 13 器件性能参数与测量精度对应关系
Figure 13. Correspondence between device performance parameters and measurement accuracy

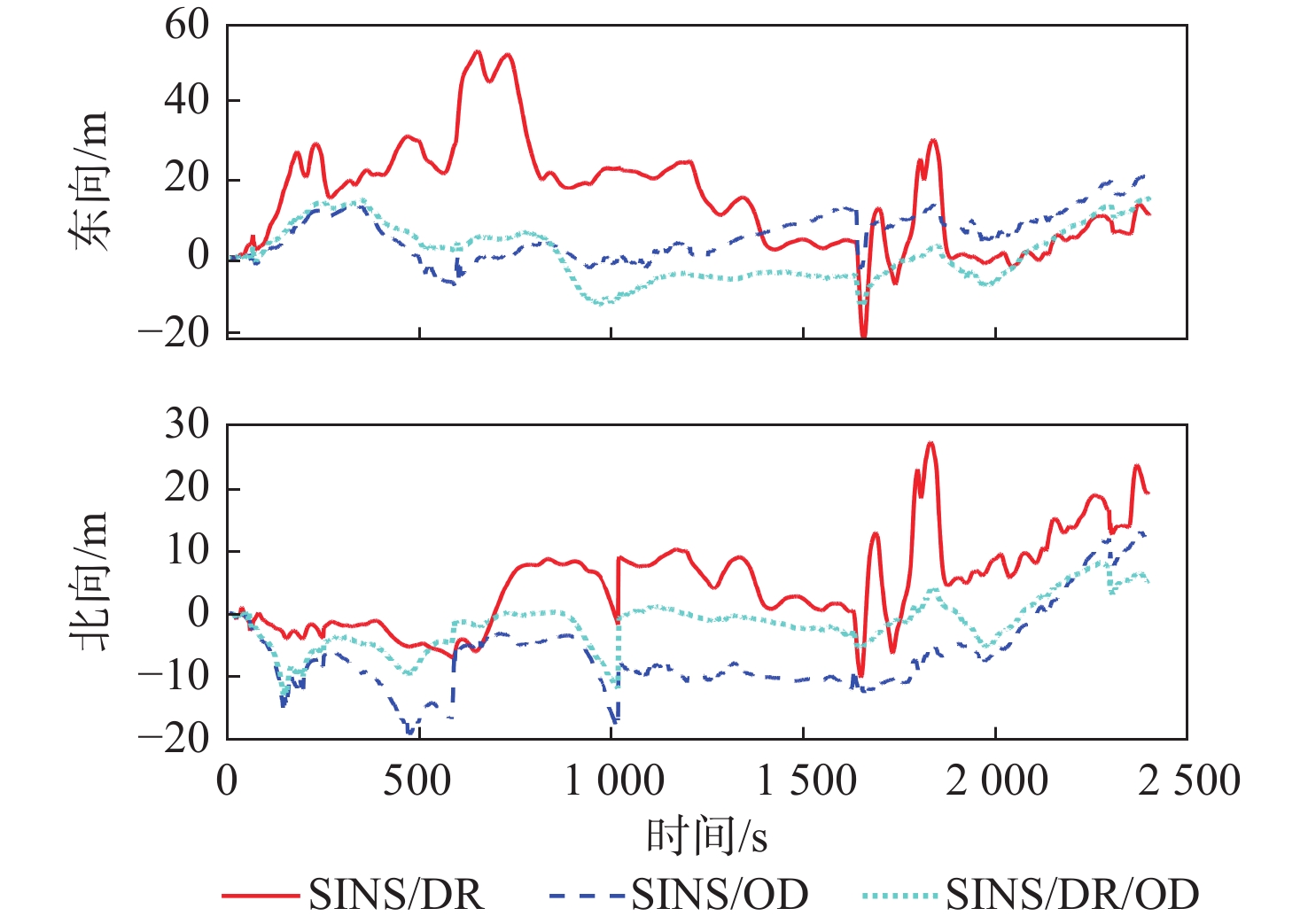
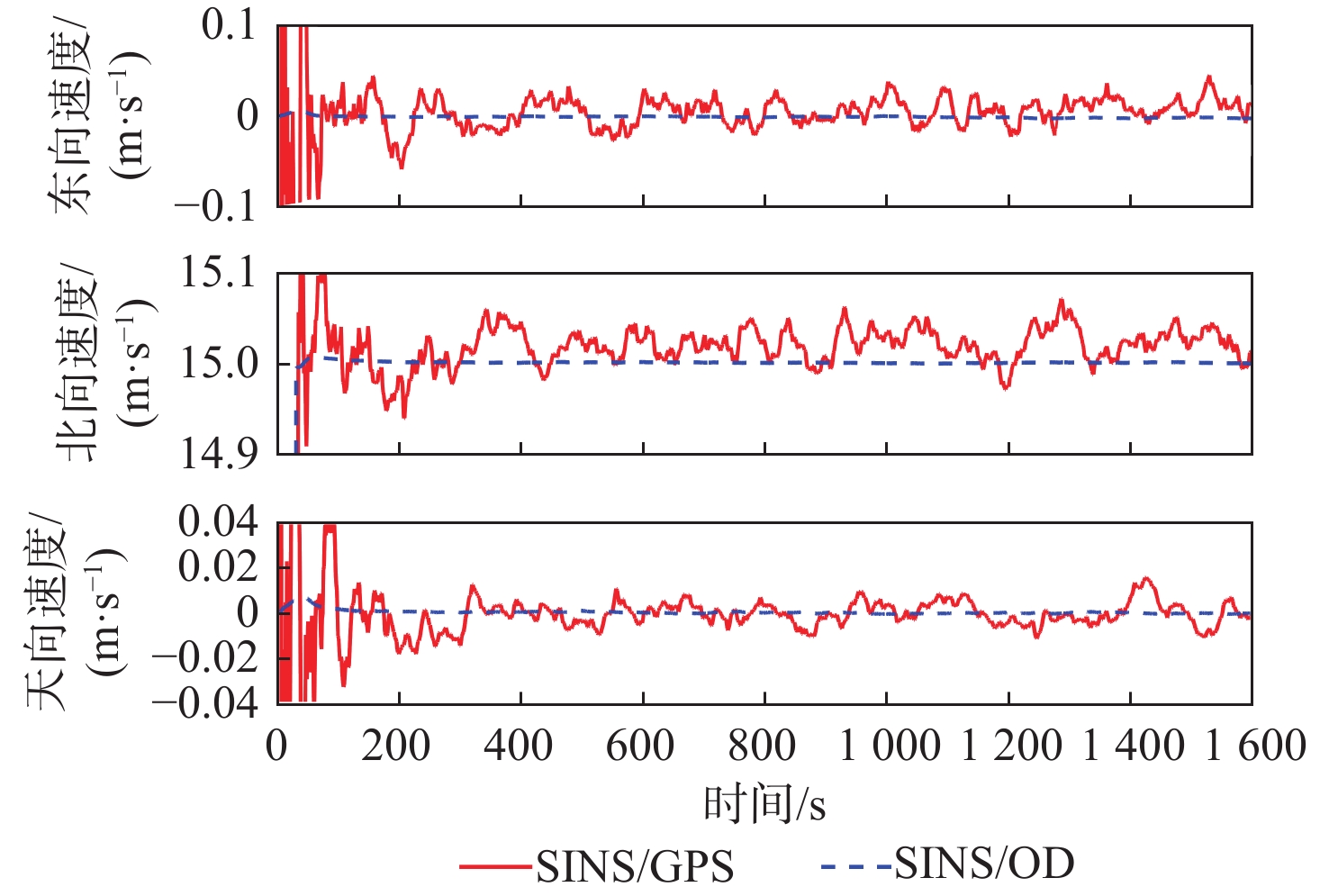
图 14 起伏较大时段速度精度对比
Figure 14. Comparison of velocity accuracy in period with great fluctuations
表 1 重复测线仿真参数
Table 1. Repeated measurement line simulation parameters
参数 数值 载体速度/(m·s−1) 15 单测线距离/km 28 测线间距/m 20 测量方向 南北 加速度计常值零偏/10−5 (m·s−2) 50 加速度计随机游走/10−5 (m·s−2) 5 陀螺仪常值零偏/((°)·h−1) 0.01 陀螺仪随机游走/((°)·h−1) 0.001 位置精度/m 0.1 速度精度/(m·s−1) 0.05 臂杆误差/m [0;0;−1] 时间不同步/s 0.01 安装误差 [30′;10′;20′] 标度因数 1 测高精度/m 1 滤波周期/s 100 通带截止频率/Hz 0.01 阻带截止频率/Hz 0.05  下载: 导出CSV
下载: 导出CSV
表 2 SINS/GPS仿真精度统计
Table 2. Accuracy statistics of SINS/GPS simulation
精度 测线 均值/
10−5 (m·s−2)标准差/
10−5 (m·s−2)符合精度/
10−5 (m·s−2)总符合精度/
10−5 (m·s−2)内符合
精度Line 1 −3.20 8.19 8.79 6.61 Line 2 1.17 8.09 8.16 Line 3 0.46 5.41 5.42 Line 4 0.71 5.19 5.24 Line 5 0.42 5.16 5.17 Line 6 0.45 5.89 5.90 外符合
精度Line 1 −3.05 10.24 10.67 7.47 Line 2 1.40 9.28 9.37 Line 3 0.79 5.62 5.67 Line 4 1.19 5.67 5.79 Line 5 0.95 6.57 6.63 Line 6 1.19 6.57 6.67
下载: 导出CSV
表 3 SINS/DR仿真精度统计
Table 3. Accuracy statistics of SINS/DR simulation
精度 测线 均值/
10−5 (m·s−2)标准差/
10−5 (m·s−2)符合精度/
10−5 (m·s−2)总符合精度/
10−5 (m·s−2)内符合
精度Line 1 0.53 2.29 2.36 1.09 Line 2 −0.35 0.54 0.64 Line 3 −0.14 0.58 0.59 Line 4 −0.10 0.47 0.48 Line 5 −0.04 0.59 0.59 Line 6 0.10 0.55 0.56 外符合
精度Line 1 1.64 2.51 2.99 2.27 Line 2 0.83 1.70 1.89 Line 3 1.16 1.61 1.98 Line 4 1.34 1.61 2.10 Line 5 1.44 1.74 2.26 Line 6 1.79 1.61 2.41
下载: 导出CSV
表 4 SINS/OD仿真精度统计
Table 4. Accuracy statistics of SINS/OD simulation
精度 测线/
10−5 (m·s−2)均值/
10−5 (m·s−2)标准差/
10−5 (m·s−2)符合精度/
10−5 (m·s−2)总符合精度/
10−5 (m·s−2)内符合
精度Line 1 0.13 1.44 1.44 0.70 Line 2 −0.22 0.39 0.45 Line 3 −0.08 0.44 0.45 Line 4 −0.03 0.35 0.35 Line 5 0.03 0.40 0.41 Line 6 0.17 0.38 0.42 外符合
精度Line 1 1.17 2.01 2.32 2.16 Line 2 0.90 1.71 1.93 Line 3 1.15 1.63 1.99 Line 4 1.34 1.61 2.09 Line 5 1.45 1.74 2.26 Line 6 1.79 1.58 2.39
下载: 导出CSV
表 5 SINS/DR/OD仿真精度统计
Table 5. Accuracy statistics of SINS/DR/OD simulation
精度 测线/
10−5 (m·s−2)均值/
10−5 (m·s−2)标准差/
10−5 (m·s−2)符合精度/
10−5 (m·s−2)总符合精度/
10−5 (m·s−2)内符合
精度Line 1 0.13 1.43 1.44 0.69 Line 2 −0.22 0.39 0.45 Line 3 −0.08 0.44 0.44 Line 4 −0.03 0.35 0.35 Line 5 0.03 0.40 0.40 Line 6 0.17 0.38 0.41 外符合
精度Line 1 1.17 2.01 2.32 2.15 Line 2 0.90 1.71 1.93 Line 3 1.15 1.62 1.98 Line 4 1.34 1.61 2.09 Line 5 1.45 1.74 2.24 Line 6 1.79 1.58 2.38
下载: 导出CSV
表 6 4种测量方法精度统计
Table 6. Accuracy statistics of four measurement methods
精度 测量方法 均值/
10−5 (m·s−2)方差/
10−5 (m·s−2)符合精度/
10−5 (m·s−2)外符合精度 SINS/GPS 4.12 1.31 2.89 SINS/DR 2.13 0.11 0.97 SINS/OD 1.11 0.02 0.53 SINS/DR/OD 0.73 0.01 0.49
下载: 导出CSV
-
[1] YU R H, CAI S K, WU M P, et al. A SINS/GNSS ground vehicle gravimetry test based on SGA-WZ02[J]. Sensors, 2015, 15(9): 23477-23495. doi: 10.3390/s150923477 [2] KWON J H. Airborne vector gravimetry using GPS/INS[D]. Columbus: The Ohin State University, 2000. [3] 黄谟涛, 邓凯亮, 吴太旗, 等. 重力异常向上延拓严密改化模型及向下延拓应用[J]. 测绘学报, 2022, 51(1): 41-52. doi: 10.11947/j.AGCS.2022.20200547HUANG M T, DENG K L, WU T Q, et al. Rigorous modification model of upward continuation and its applications on the downward continuation of gravity anomaly[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(1): 41-52(in Chinese). doi: 10.11947/j.AGCS.2022.20200547 [4] LI X P. Moving base INS/GPS vector gravimetry on a land vehicle [D]. Columbus: The Ohio State University, 2007. [5] DAI D K, WANG X S, ZHAN D J, et al. Dynamic measurement of high-frequency deflections of the vertical based on the observation of INS/GNSS integration attitude error[J]. Journal of Applied Geophysics, 2015, 119(1):89-98. [6] ZHANG X H, ZHENG K, LU C X, et al. Acceleration estimation using a single GPS receiver for airborne scalar gravimetry[J]. Advances in Space Research, 2017, 60(10): 2277-2288. doi: 10.1016/j.asr.2017.08.038 [7] XIONG Z M, CAO J L, LIAO K X, et al. A new method for underwater dynamic gravimetry based on multisensor integrated navigation[J]. Geophysics, 2020, 85(3):69-80. [8] OUYANG W, WU Y X, CHEN H Y. INS/odometer land navigation by accurate measurement modeling and multiple-model adaptive estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 245-262. doi: 10.1109/TAES.2020.3011998 [9] YANG B, XUE L, FAN H D, et al. SINS/odometer/Doppler radar high-precision integrated navigation method for land vehicle[J]. IEEE Sensors Journal, 2021, 21(13): 15090-15100. doi: 10.1109/JSEN.2021.3071181 [10] YU Z P, HU Y J, HUANG J M. GPS/INS/odometer/DR integrated navigation system aided with vehicular dynamic characteristics for autonomous vehicle application[J]. IFAC-PapersOnLine, 2018, 51(31): 936-942. doi: 10.1016/j.ifacol.2018.10.060 [11] GAO J X, LI K, CHEN J Y. Research on the integrated navigation technology of SINS with couple odometers for land vehicles[J]. Sensors, 2020, 20(2): 546. doi: 10.3390/s20020546 [12] 刘鹏飞. 里程计辅助的高精度车载GNSS/INS组合导航系统[J]. 光学 精密工程, 2020, 28(4): 979-987.LIU P F. High-precision vehicle GNSS/INS integrated navigation system aided by odometer[J]. Optics and Precision Engineering, 2020, 28(4): 979-987(in Chinese). [13] YU R H, WU M P, ZHANG K D, et al. A new method for land vehicle gravimetry using SINS/VEL[J]. Sensors, 2017, 17(4): 766. doi: 10.3390/s17040766 [14] YU R H, QIU X T, CAO J L, et al. Improving land vehicle gravimetry using a new SINS/GNSS/VEL method[J]. IOP Conference Series: Earth and Environmental Science, 2020, 513: 012054. doi: 10.1088/1755-1315/513/1/012054 [15] ZHANG Z Q, LI J C, ZHANG K D, et al. Experimental study on underwater moving gravity measurement by using strapdown gravimeter based on AUV platform[J]. Marine Geodesy, 2021, 44(2): 108-135. doi: 10.1080/01490419.2020.1861138 [16] 张开东. 基于SINS/DGPS的航空重力测量方法研究[D]. 长沙: 国防科学技术大学, 2007.ZHANG K D. Research on the methods of airborne gravimetry based on SINS/DGPS[D]. Changsha: National University of Defense Technology, 2007(in Chinese). [17] LI X P, JEKELI C. Ground-vehicle INS/GPS vector gravimetry[J]. Geophysics, 2008, 73(2): 11-21. [18] CAI S K, ZHANG K D, WU M P. Improving airborne strapdown vector gravimetry using stabilized horizontal components[J]. Journal of Applied Geophysics, 2013, 98(3): 79-89. [19] CAI S K, LU S H, ZHAO L, et al. Improving strapdown airborne gravimetry by yaw tracking rotation modulation[J]. Journal of Coastal Research, 2020, 99(S1): 373-381. [20] 郝诗文, 张志利, 周召发, 等. 重力扰动对惯性导航系统初始对准的影响[J]. 系统工程与电子技术, 2020, 42(7): 1575-1581. doi: 10.3969/j.issn.1001-506X.2020.07.20HAO S W, ZHANG Z L, ZHOU Z F, et al. Influence of gravity disturbance on initial alignment of inertial navigation system[J]. Systems Engineering and Electronics, 2020, 42(7): 1575-1581(in Chinese). doi: 10.3969/j.issn.1001-506X.2020.07.20 [21] TIE J B, CAO J L, CHANG L B, et al. A model of gravity vector measurement noise for estimating accelerometer bias in gravity disturbance compensation[J]. Sensors, 2018, 18(3): 883-908. doi: 10.3390/s18030883 [22] 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019.YAN G M, WENG J. Strapdown inertial navigation algorithm and integrated navigation principle[M]. Xi’an: Northwestern Polytechnical University Press, 2019(in Chinese). [23] JOSEFSSON R. New results from strapdown airborne gravimetry using temperature stabilization[J]. Remote Sensing, 2019, 11(22): 2682-2700. doi: 10.3390/rs11222682 [24] WANG W, GAO J Y, LI D M, et al. Measurements and accuracy evaluation of a strapdown marine gravimeter based on inertial navigation[J]. Sensors, 2018, 18(11): 3902-3914. doi: 10.3390/s18113902 [25] KWON J H, JEKELI C. A new approach for airborne vector gravimetry using GPS/INS[J]. Journal of Geodesy, 2001, 74(10): 690-700. doi: 10.1007/s001900000130 [26] 于瑞航. 捷联式车载重力测量关键技术研究[D]. 长沙: 国防科技大学, 2017.YU R H. Research on key technologies for strapdown ground vehicle gravimetry[D]. Changsha: National University of Defense Technology, 2017(in Chinese). [27] 吴美平, 蔡劭琨, 于瑞航, 等. 捷联式重力测量技术研究进展[J]. 导航与控制, 2020, 19(4/5): 161-169.WU M P, CAI S K, YU R H, et al. Research progress of strapdown gravimetry technique[J]. Navigation and Control, 2020, 19(4/5): 161-169(in Chinese). [28] WANG M H, WU M P, CAO J L, et al. Strapdown airborne gravimetry quality assessment method based on single survey line data: A study by SGA-WZ02 gravimeter[J]. Sensors, 2018, 18(2): 360-376. doi: 10.3390/s18020360 [29] 郎骏健, 梁星辉, 柳林涛, 等. 航空重力傅里叶基追踪低通滤波方法研究[J]. 地球物理学报, 2018, 61(12): 4737-4745. doi: 10.6038/cjg2018L0766LANG J J, LIANG X H, LIU L T, et al. Study on Fourier basis tracking low pass filtering method for airborne gravity[J]. Chinese Journal of Geophysics, 2018, 61(12): 4737-4745(in Chinese). doi: 10.6038/cjg2018L0766 [30] 蔡劭琨. 航空重力矢量测量及误差分离方法研究[D]. 长沙: 国防科学技术大学, 2014.CAI S K. The research about airborne vector gravimeter and methods of errors separation[D]. Changsha: National University of Defense Technology, 2014(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 305
- HTML全文浏览量: 142
- PDF下载量: 16
- 被引次数: 0
