



A low-altitude UAV obstacle detection method based on position constraint and attention mechanism
-
摘要:
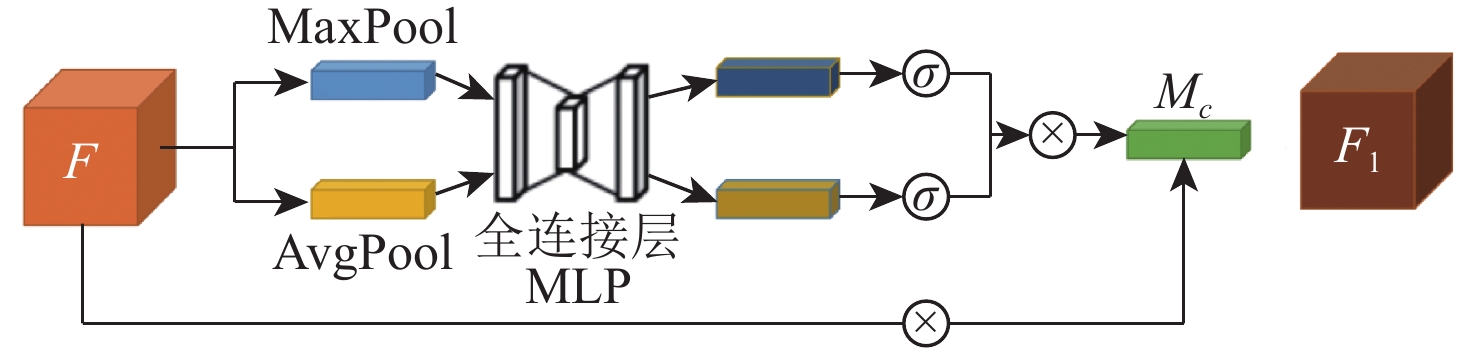
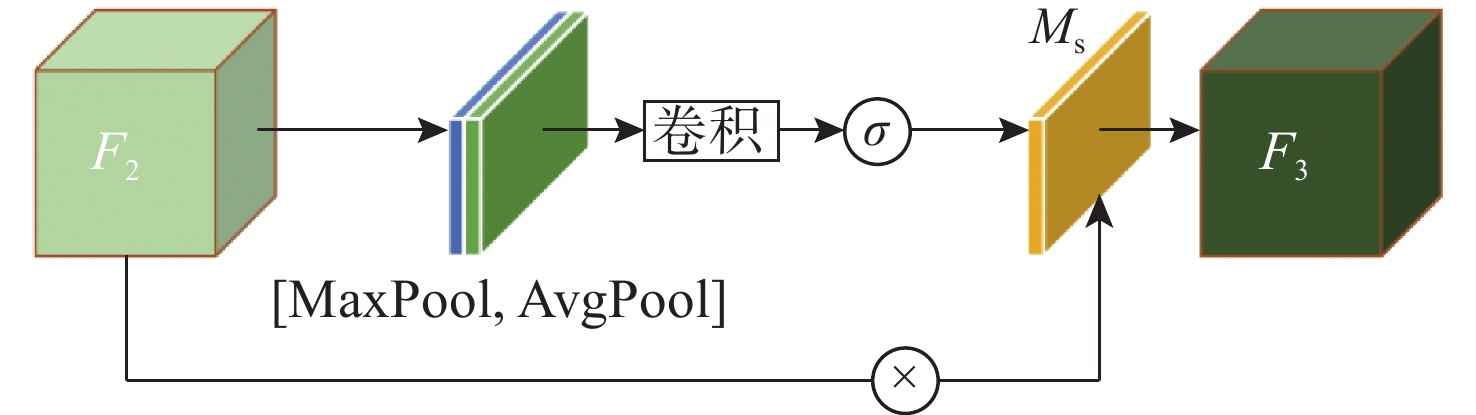
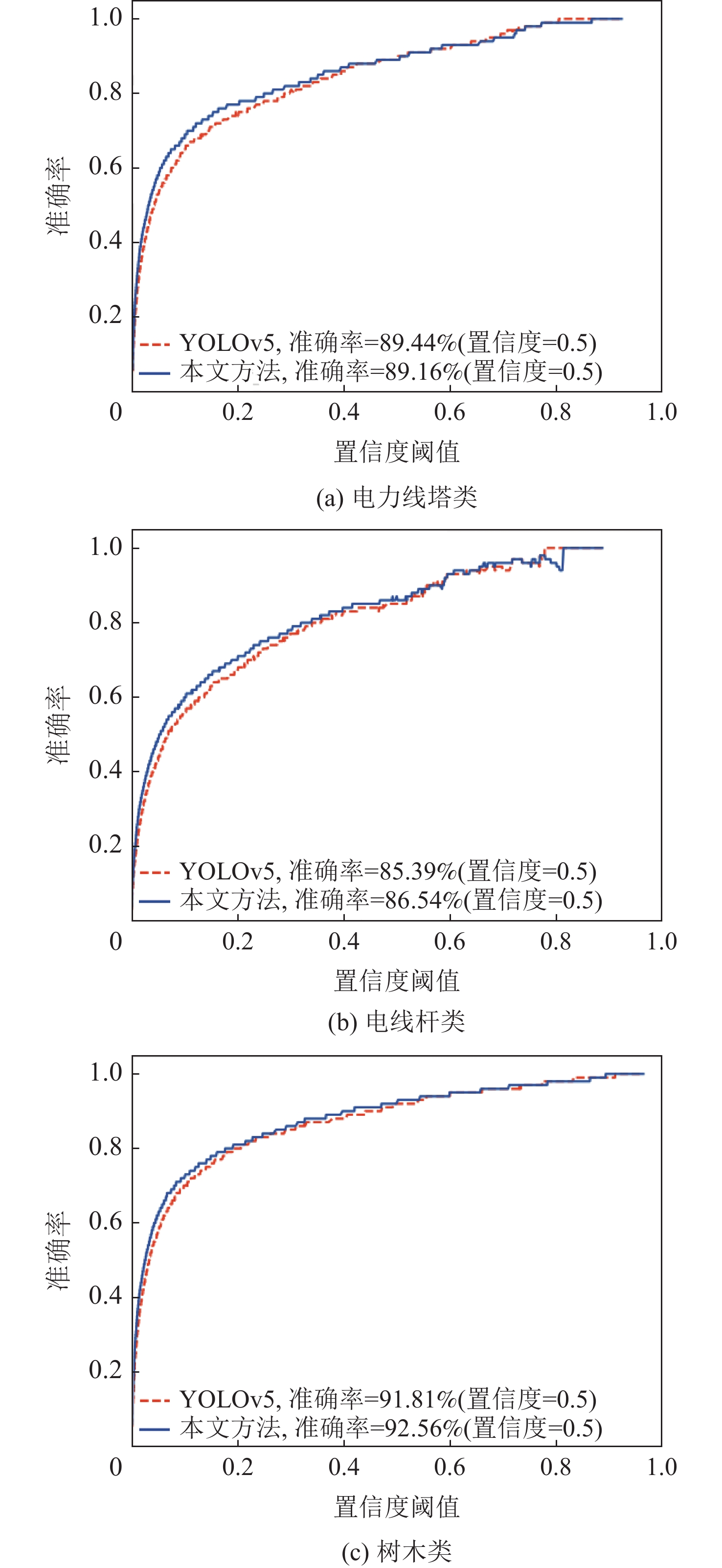
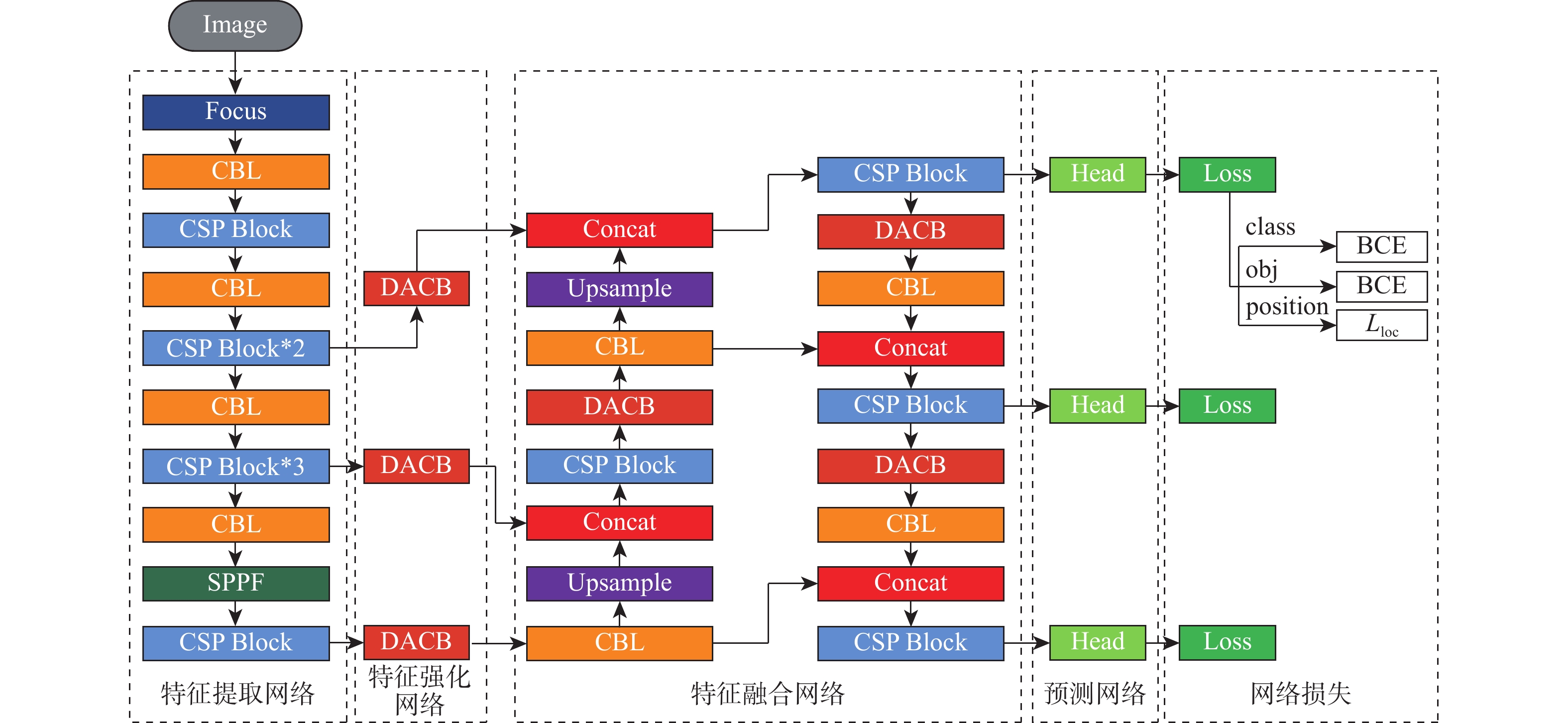
无人机(UAV)在低空领域广泛应用于电力巡检、搜救、侦察等任务,对飞行过程中的障碍物进行提前检测是完成既定任务的安全保障。为满足无人机低空飞行时对障碍物的检测精度要求及位置回归精度要求,提出一种基于位置约束与注意力改进的低空无人机障碍物检测方法。分析位置回归损失函数的不足并基于此提出分离尺度损失与融合方向约束的损失函数对回归过程进行优化;改进注意力机制CBAM提出双重注意力机制以强化特征抑制干扰,提高检测性能。实验结果表明:本文方法在mAP上提高了2.28%,在mAP@0.5:0.95上提高了2.7%,在检测精度和位置回归精度上都表现出了更好的低空障碍物检出性能。
Abstract:Unmanned aerial vehicles (UAV) are widely used in low-altitude areas for power inspection, search and rescue, reconnaissance, and other tasks. The detection of obstacles in advance during flight aims to ensure the completion of established tasks. In order to meet the requirements of obstacle detection accuracy and position regression accuracy of UAV flying at low altitudes, a low-altitude UAV obstacle detection method based on improved position constraints and attention mechanism was proposed. The deficiency of position regression loss function was analyzed. On this basis, the loss function of separation scale loss and fusion direction constraint was proposed to optimize the regression process. The improved attention mechanism CBAM proposed a dual attention mechanism to strengthen the feature suppression interference and improve the detection performance. The experimental results show that the proposed method improves by 2.28% on mAP and 2.7% on mAP@0.5:0.95, showing better detection performance of low-altitude obstacles in terms of both detection accuracy and position regression accuracy.
-
表 1 性能对比
Table 1. Performance comparison
模型 mAP/% R/% F1/% mAP@0.5:0.95/% mAP@0.75/% YOLOv5 90.09 80.21 84.86 64.8 71.1 本文方法 92.37 84.66 88.35 67.5 73.7  下载: 导出CSV
下载: 导出CSV
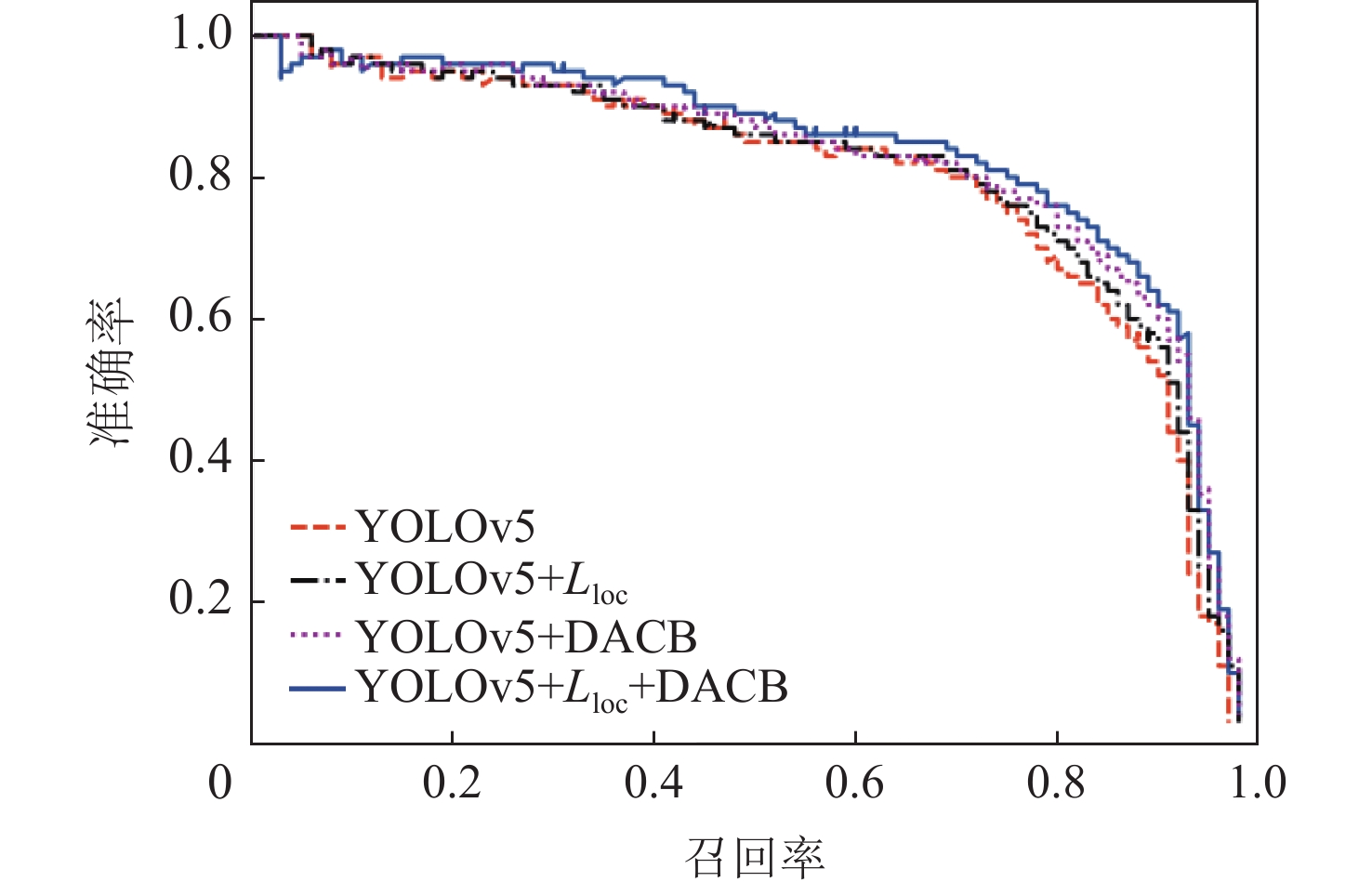
表 2 消融实验
Table 2. Ablation experiment
模型 mAP/% mAP@0.5:0.95/% R/% 参数量/MB YOLOv5(CIOU) 90.09 64.8 80.21 46.149 YOLOv5+GIOU 89.89 64.7 79.54 46.149 YOLOv5+Lloc 90.56 65.1 80.55 46.149 YOLOv5+DACB 91.41 66.1 82.73 64.345 YOLOv5+CBAM 91.06 65.6 81.56 46.641 YOLOv5+Lloc+
DACB(本文)92.37 67.5 84.66 64.345
下载: 导出CSV
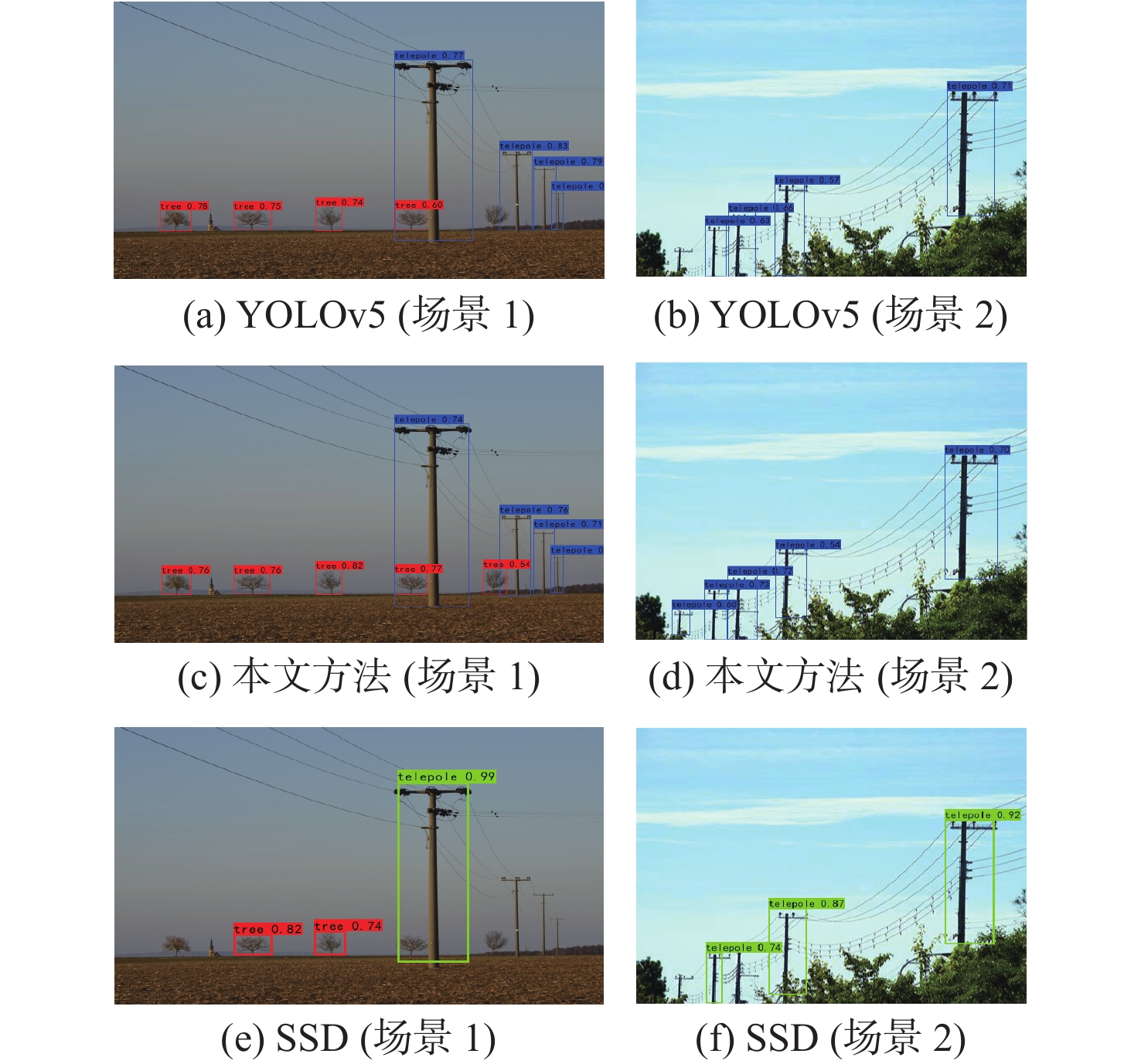
表 3 主流目标检测算法性能对比
Table 3. Performance comparison of mainstream target detection algorithms
模型 mAP/% mAP@0.5:0.95/% mAP@0.75/% 参数量/MB CenterNet 78.09 51.0 53.6 32.665 SSD 86.86 60.6 68.2 23.879 Faster R-CNN 92.01 64.2 72.3 136.730 本文方法 92.37 67.5 73.7 64.345
下载: 导出CSV
-
[1] 王恒涛, 张上, 陈想, 等. 轻量化无人机航拍目标检测算法[J]. 电子测量技术, 2022, 45(19): 167-174.WANG H T, ZHANG S, CHEN X, et al. Target detection algorithm of lightweight UAV aerial photography[J]. Electronic Measurement Technology, 2022, 45(19): 167-174(in Chinese). [2] 戴颖成, 陈知明, 刘峰, 等. 基于无人机红外影像的森林火灾燃烧点检测方法[J]. 中南林业科技大学学报, 2022, 42(9): 102-114.DAI Y C, CHEN Z M, LIU F, et al. Forest fire detection method based on UAV infrared images and deep learning[J]. Journal of Central South University of Forestry & Technology, 2022, 42(9): 102-114(in Chinese). [3] 宋谱怡, 陈红, 苟浩波. 改进YOLOv5s的无人机目标检测算法[J]. 计算机工程与应用, 2023, 59(1): 108-116. doi: 10.3778/j.issn.1002-8331.2205-0200SONG P Y, CHEN H, GOU H B. Improving UAV object detection algorithm for YOLOv5s[J]. Computer Engineering and Applications, 2023, 59(1): 108-116(in Chinese). doi: 10.3778/j.issn.1002-8331.2205-0200 [4] 奉志强, 谢志军, 包正伟, 等. 基于改进YOLOv5的无人机实时密集小目标检测算法[J]. 航空学报, 2023, 44(7): 327106.FENG Z Q, XIE Z J, BAO Z W, et al. Real-time dense small object detection algorithm for UAV based on improved YOLOv5[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(7): 327106(in Chinese). [5] 谢华, 苏方正, 尹嘉男, 等. 低空无人机飞行冲突分类探测与差异解脱方法研究[J]. 安全与环境学报, 2023, 23(9): 3131-3142.XIE H, SU F Z, YIN J N, et al. Research on classified detection and differential resolution method for UAV flight conflicts in low altitude airspace[J]. Journal of Safety and Environment, 2023, 23(9): 3131-3142(in Chinese). [6] 赵玥萌, 刘会刚. 基于优化YOLOv4算法的低空无人机检测与跟踪[J]. 激光与光电子学进展, 2022, 59(12): 397-406.ZHAO Y M, LIU H G. Detection and tracking of low-altitude unmanned aerial vehicles based on optimized YOLOv4 algorithm[J]. Laser & Optoelectronics Progress, 2022, 59(12): 397-406(in Chinese). [7] 史雨馨, 朱继杰, 凌志刚. 基于特征增强YOLOv4的无人机检测算法研究[J]. 电子测量与仪器学报, 2022, 36(7): 16-23.SHI Y X, ZHU J J, LING Z G. Research on UAV detection method based on feature enhanced YOLOv4 algorithm[J]. Journal of Electronic Measurement and Instrumentation, 2022, 36(7): 16-23 (in Chinese). [8] GIRSHICKR, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[J]. IEEE Conference on Computer Vision and Pattern Recognition, 2014: 580-587. [9] HE K M, ZHANG X Y, REN S Q, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. doi: 10.1109/TPAMI.2015.2389824 [10] GIRSHICK R. Fast R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2015: 1440-1448. [11] REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. doi: 10.1109/TPAMI.2016.2577031 [12] REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 936-942. [13] LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[M]. Cham: Springer, 2016: 412-415. [14] LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 936-944. [15] YU J H, JIANG Y N, WANG Z Y, et al. UnitBox: An advanced object detection network[C]// Proceedings of the 24th ACM international conference on Multimedia. New York: ACM, 2016: 516-520. [16] REZATOFIGHI H, TSOI N, GWAK J, et al. Generalized intersection over union: a metric and a loss for bounding box regression[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2019: 658-666. [17] ZHENG Z H, WANG P, LIU W, et al. Distance-IoU loss: faster and better learning for bounding box regression[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(7): 12993-13000. doi: 10.1609/aaai.v34i07.6999 [18] 李子豪, 王正平, 贺云涛. 基于自适应协同注意力机制的航拍密集小目标检测算法[J]. 航空学报, 2023, 44(13): 327944.LI Z H, WANG Z P, HE Y T. Aerial-photography dense small target detection algorithm based on adaptive cooperative attention mechanism[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(13): 327944(in Chinese). [19] 彭继慎, 孙礼鑫, 王凯, 等. 基于模型压缩的ED-YOLO电力巡检无人机避障目标检测算法[J]. 仪器仪表学报, 2021, 42(10): 161-170.PENG J S, SUN L X, WANG K, et al. ED-YOLO power inspection UAV obstacle avoidance target detectionalgorithm based on model compression[J]. Chinese Journal of Scientific Instrument, 2021, 42(10): 161-170(in Chinese). [20] 张瑞倩, 邵振峰, PORTNOV A, 等. 多尺度空洞卷积的无人机影像目标检测方法[J]. 武汉大学学报(信息科学版), 2020, 45(6): 895-903.ZHANG R Q, SHAO Z F, PORTNOV A, et al. Multi-scale dilated convolutional neural network for object detection in UAV images[J]. Geomatics and Information Science of Wuhan University, 2020, 45(6): 895-903(in Chinese). [21] 王美华, 吴振鑫, 周祖光. 基于注意力改进CBAM的农作物病虫害细粒度识别研究[J]. 农业机械学报, 2021, 52(4): 239-247.WANG M H, WU Z X, ZHOU Z G. Fine-grained identification research of crop pests and diseases based on improved CBAM via attention[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(4): 239-247(in Chinese). [22] 陈宇梁, 董绍江, 孙世政, 等. 改进YOLOv5s的弱光水下生物目标检测算法[J]. 北京航空航天大学学报, 2024, 50(2): 499-507.CHEN Y L, DONG S J, SUN S Z, et al. Improved YOLOv5s low-light underwater biological target detection algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(2): 499-507(in Chinese). [23] 毛杨坤, 段现银, 林昕, 等. 基于目标检测的选区激光熔融成形过程熔池与飞溅监测[J]. 机械工程学报, 2023, 59(9): 335-348. doi: 10.3901/JME.2023.09.335MAO Y K, DUAN X Y, LIN X, et al. Melt pool and spatter monitoring in selective laser melting forming process based on target detection[J]. Journal of Mechanical Engineering, 2023, 59(9): 335-348(in Chinese). doi: 10.3901/JME.2023.09.335 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 295
- HTML全文浏览量: 124
- PDF下载量: 8
- 被引次数: 0
