



Prediction of aircraft surface trajectory based on the GRU-IKF model with attention mechanism
-
摘要:
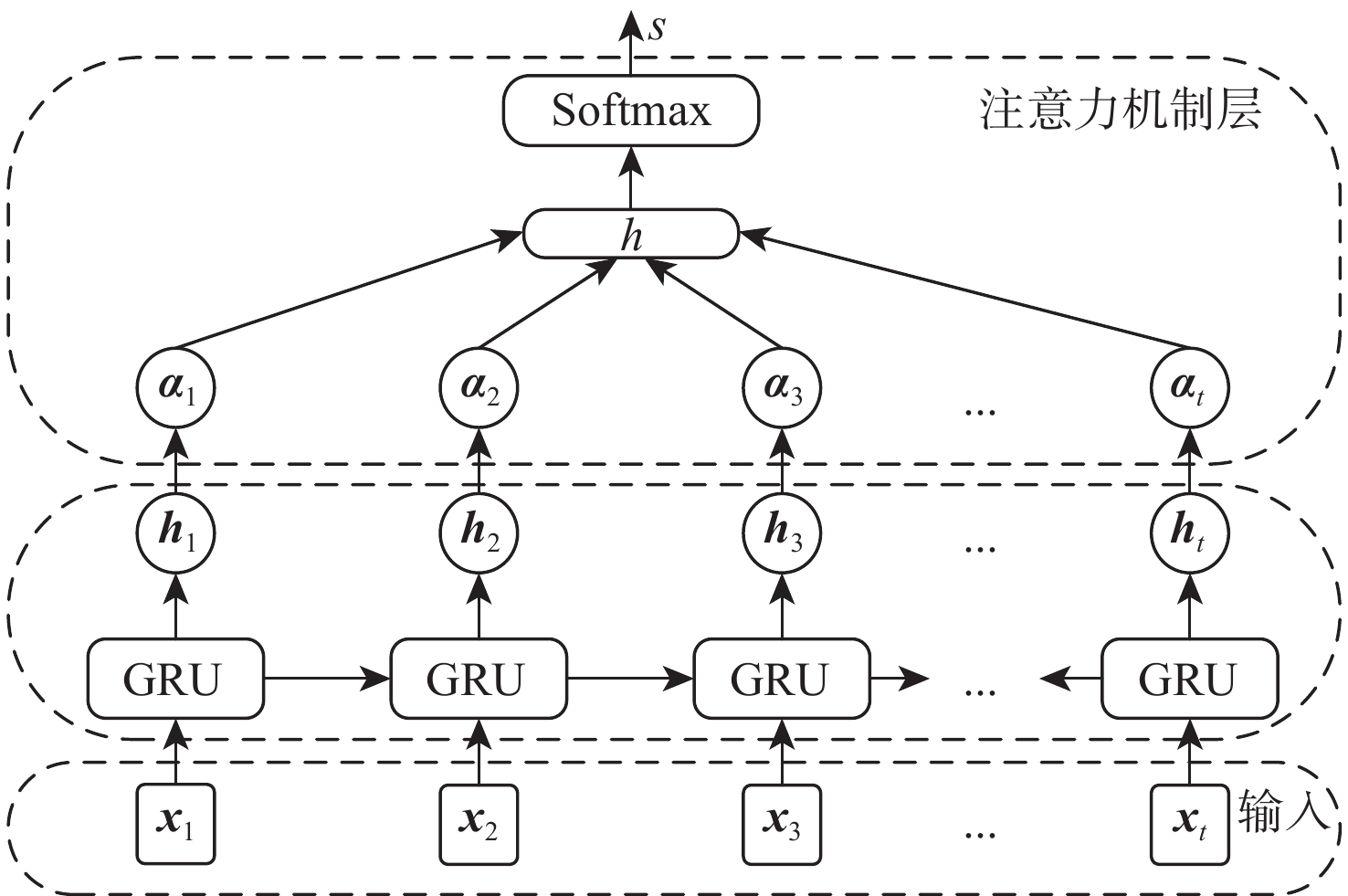
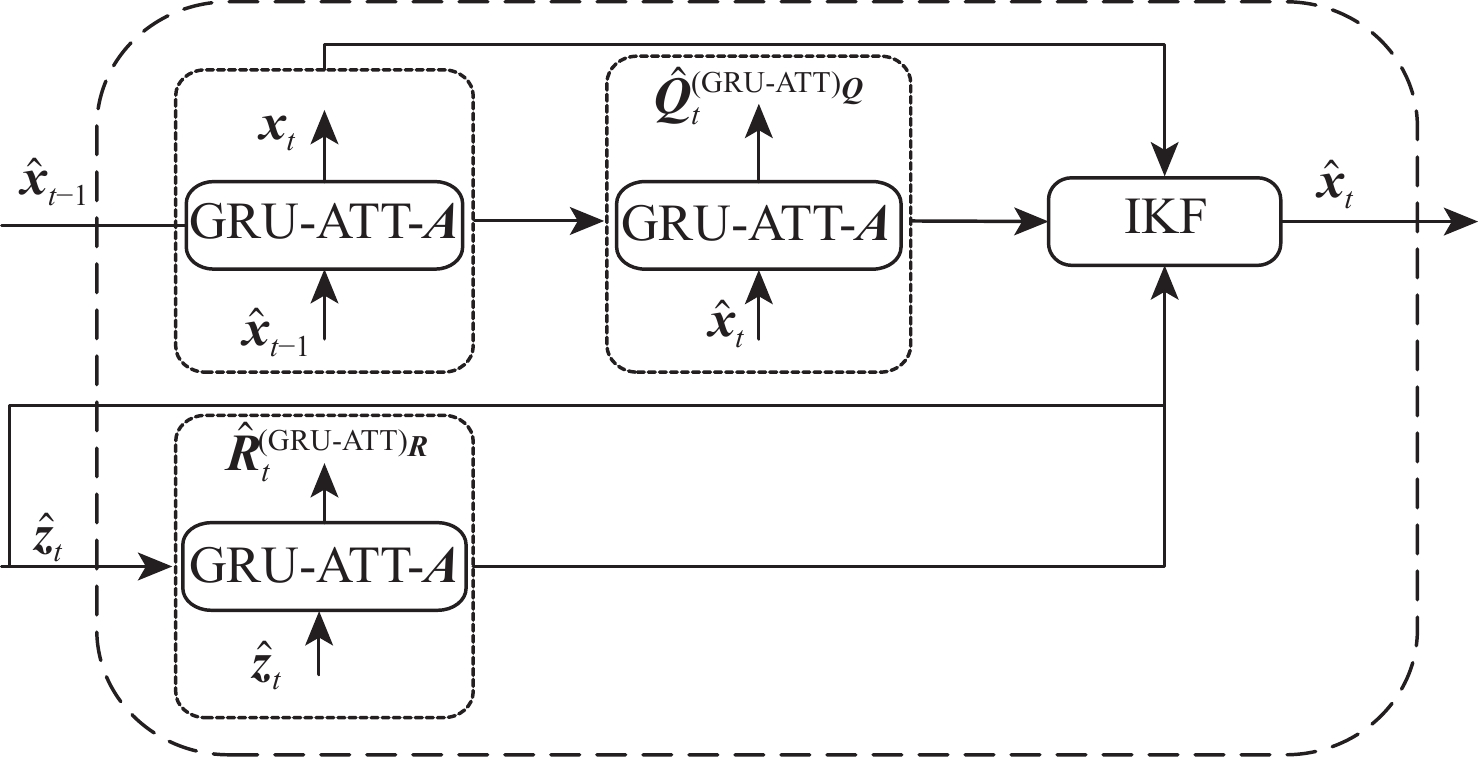
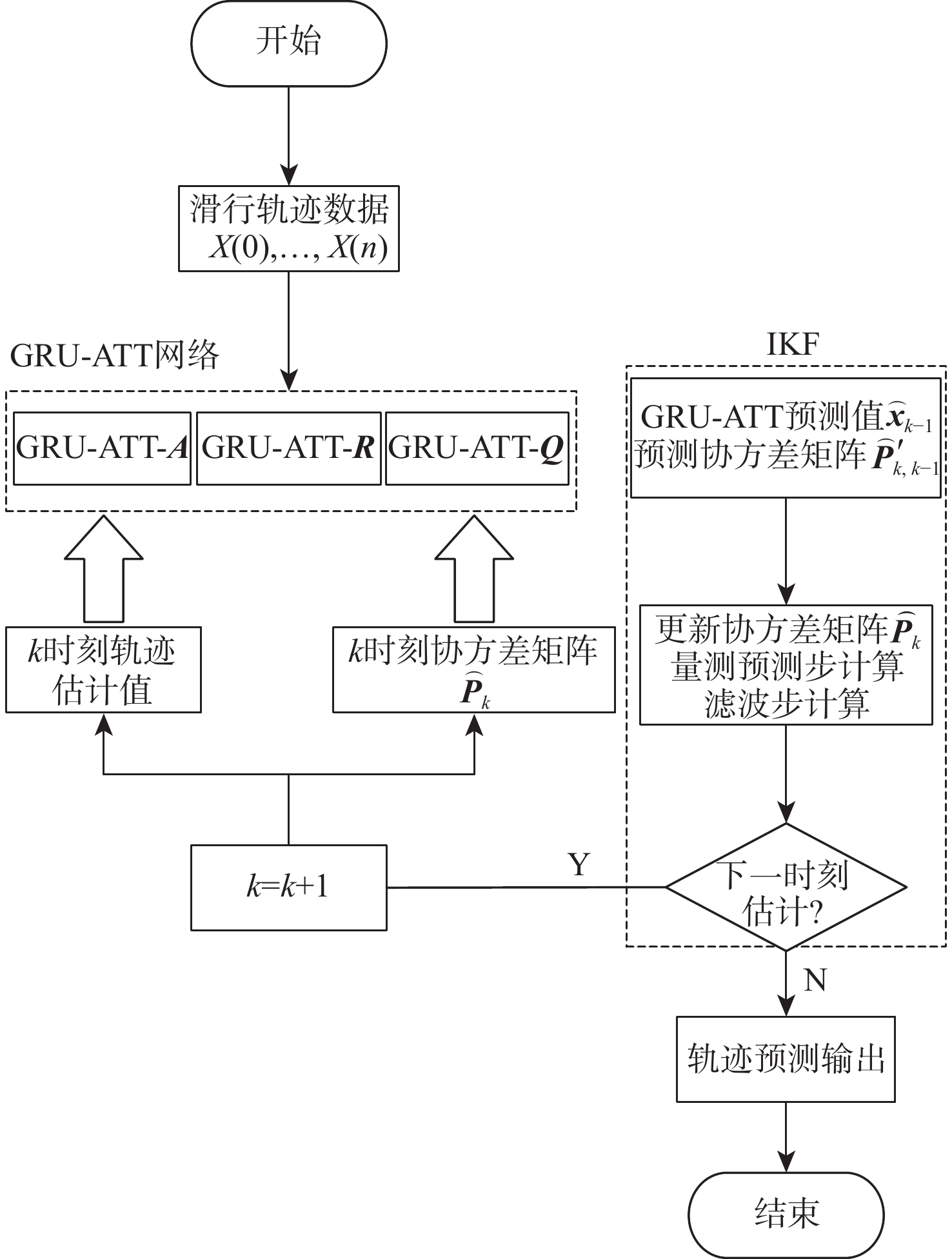
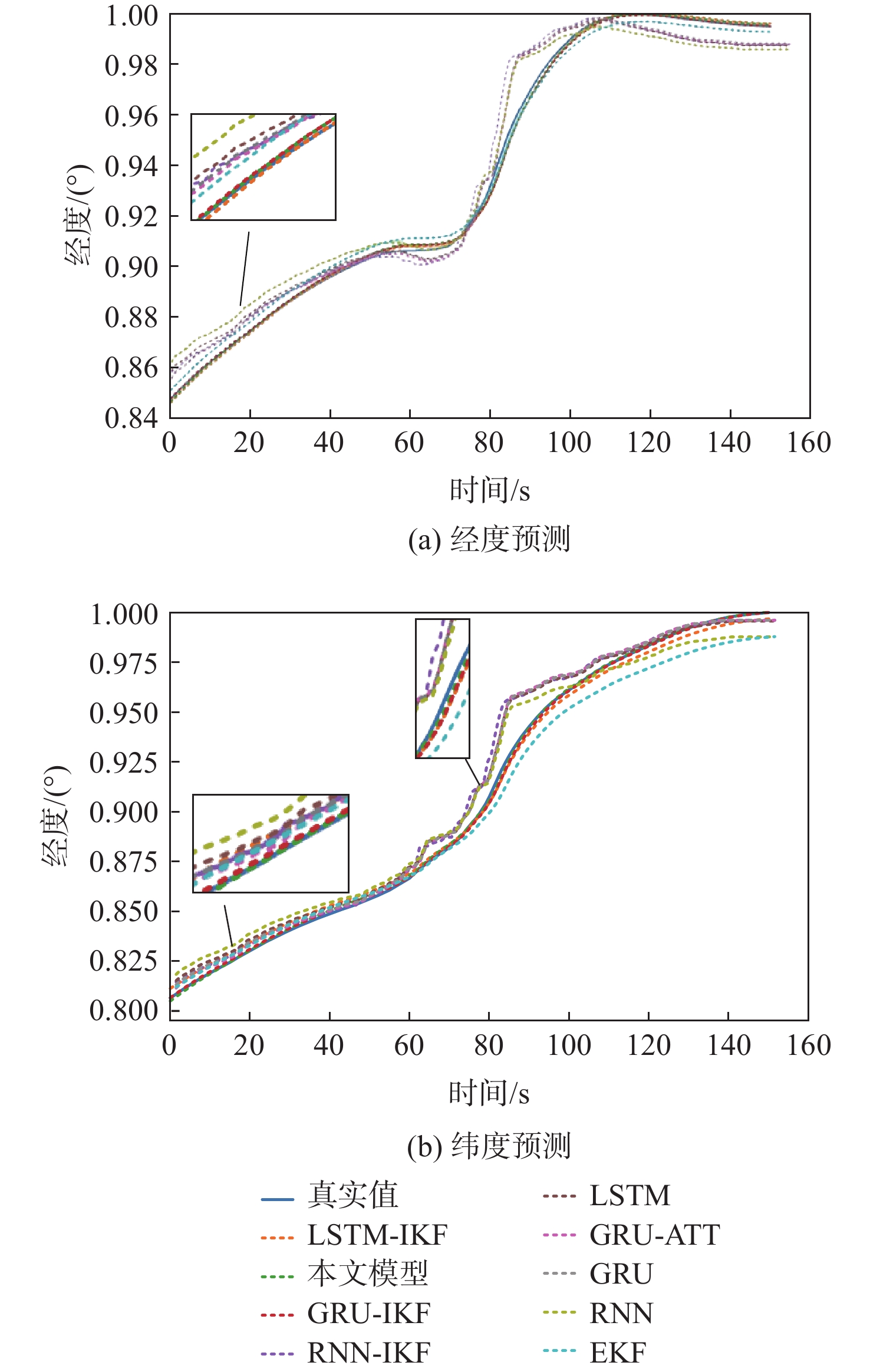
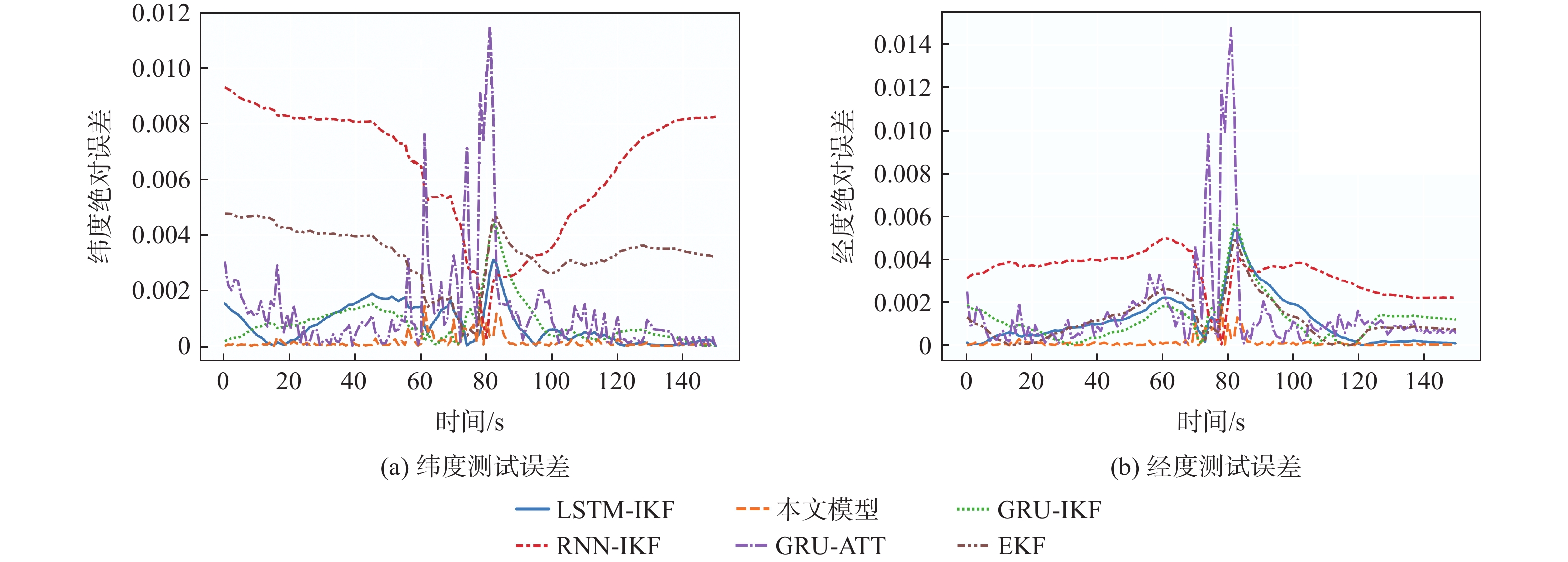
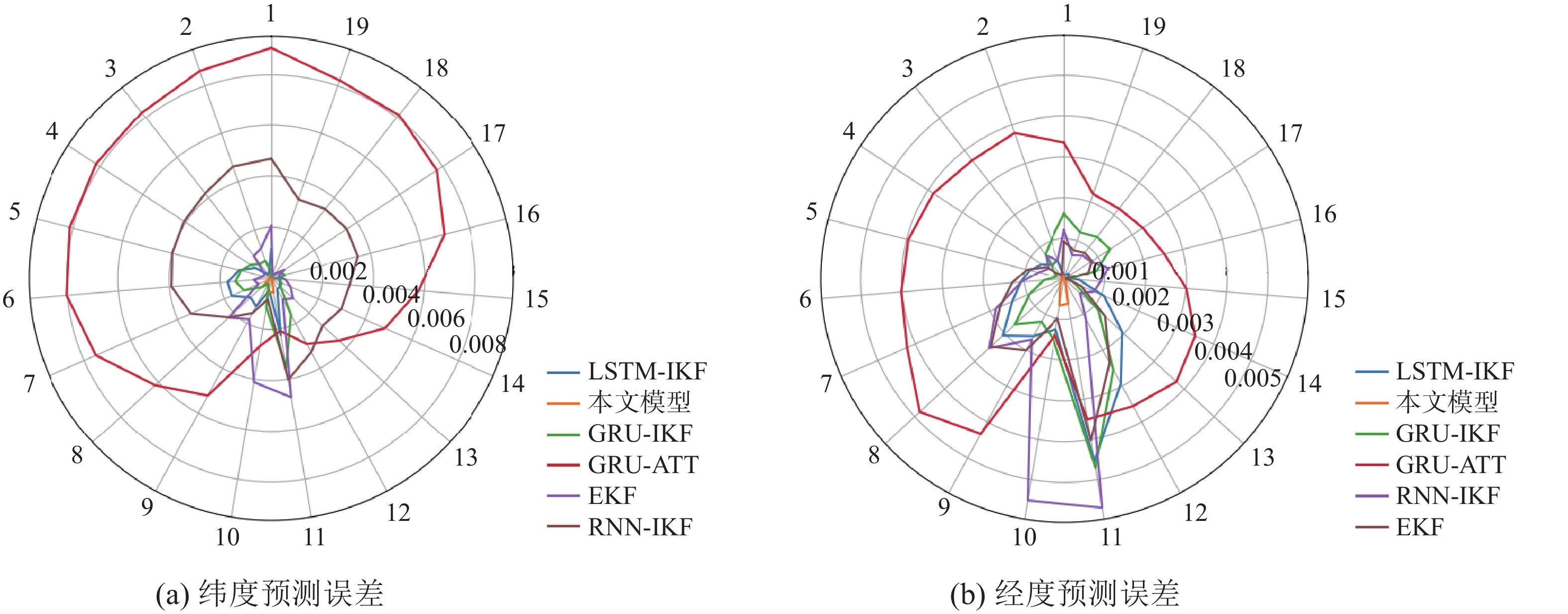
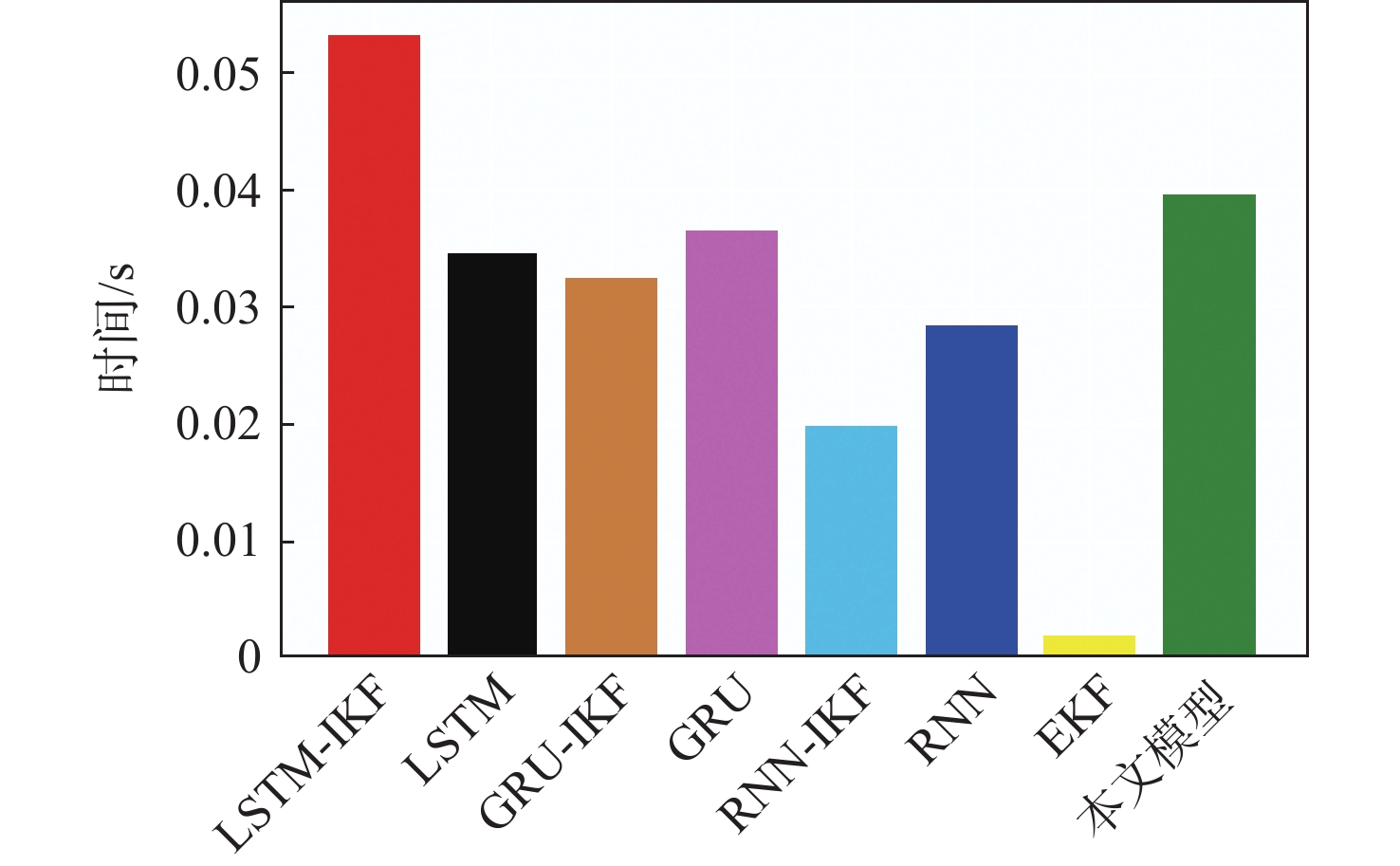
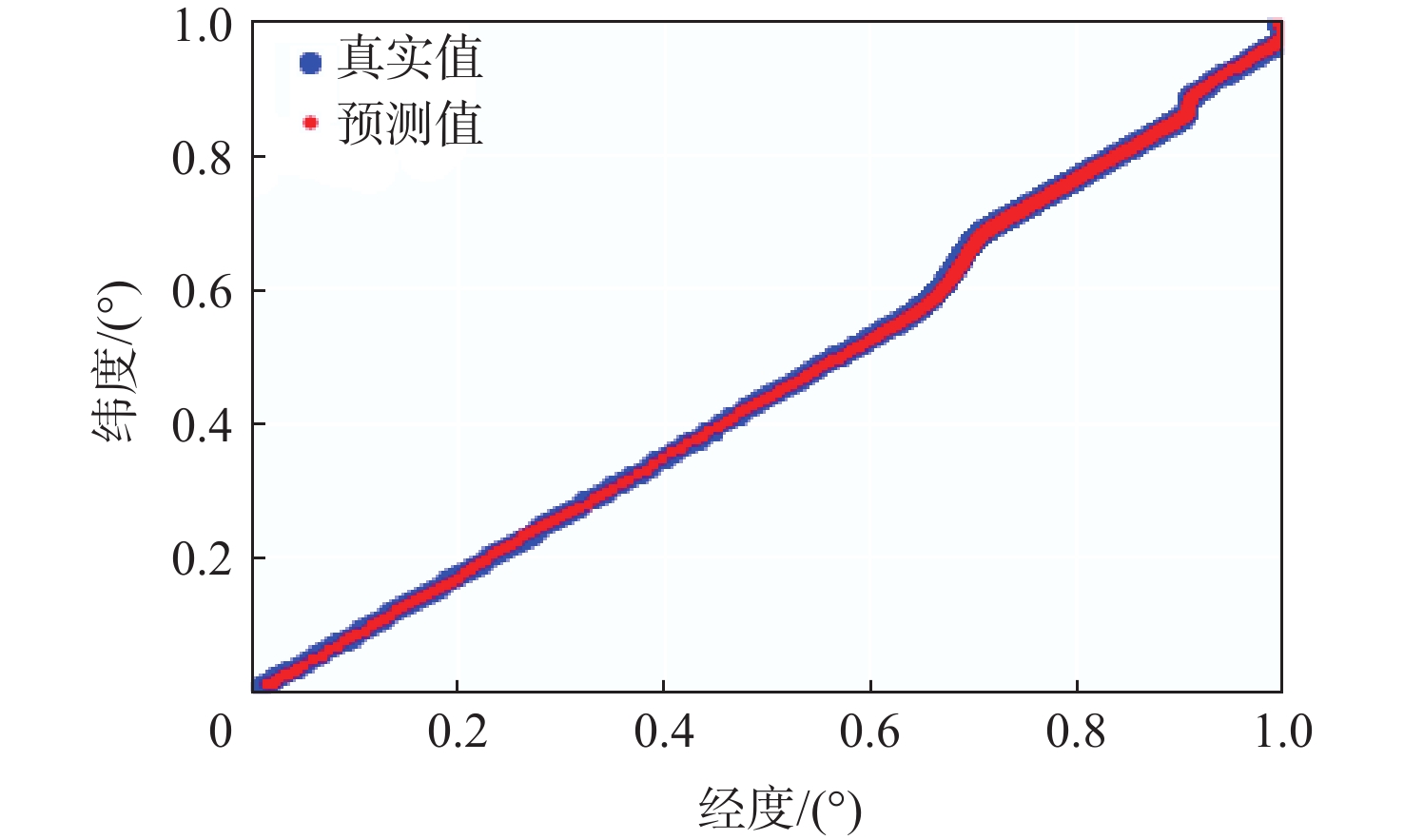
为解决机场场面滑行冲突、等待时间长等运行问题,保证场面安全的同时提高服务水平,增加机场吞吐量,针对机器学习模型性能依赖于良好数据集的现状,提出一种基于注意力机制、融合门控循环单元(GRU)和改进卡尔曼滤波算法(IKF)的场面航空器滑行轨迹预测模型。使用3个独立的门控循环单元网络来捕获航空器未来时刻的运动状态和时间上的依赖性,并引入注意力机制加强提取数据差异性特征的能力,学习输入到输出的映射关系;与改进后的扩展卡尔曼滤波器融合,将神经网络输出的结果整合到状态预测和更新过程,以提高预测轨迹序列的准确性。利用禄口机场航空器真实滑行轨迹对所提模型的有效性进行验证,仿真结果表明:所提模型能够对场面航空器滑行轨迹进行有效准确的预测,总体均方误差约为0.001 28,相较于单一循环神经网络(RNN)、长短时记忆(LSTM)网络及GRU模型,均方根误差(RMSE)分别减小72.9%,54.7%和39.9%,预测耗时40 ms,可以准确、快速预测滑行轨迹,为降低机场场面管理系统运行负荷提供帮助。
-
关键词:
- 航空运输 /
- 改进卡尔曼滤波 /
- GRU-Attention神经网络 /
- 机场场面运行 /
- 轨迹预测
Abstract:The prediction of aircraft taxiing trajectory helps to solve operational problems such as taxiing conflicts and long waiting times at airports, ensuring surface safety while improving service levels and increasing airport throughput. A model is proposed to predict the taxiing trajectory of a surface aircraft based on an attention mechanism that combines gated recurrent units (GRU) and an improved Kalman filter algorithm (IKF). This addresses the current situation where the performance of machine learning models depends on good data sets. In order to better extract data discrepancy features and learn input-to-output mapping relationships, three independent networks of gated recurrent units are first used to capture the future moment motion states and temporal dependencies of the aircraft. An enhanced extended Kalman filter is then fused with the neural network outputs to integrate them into the state prediction and update process, ultimately improving the predicted trajectory sequence accuracy. Finally, the validity of the model was verified using real aircraft taxi trajectories at Lukou Airport. The simulation results show that the proposed model can effectively and accurately predict aircraft taxi trajectories at the field with an overall mean square error of approximately 0.00128. Compared with the single recurrent neural network (RNN), long and short-term memory network (LSTM) and GRU model, the root mean square error (RMSE) is reduced by 72.9%, 54.7% and 39.9% respectively, and the prediction time is 40 ms, which could accurately and quickly predict the taxiing trajectory and provide assistance in reducing the operating load of the airport surface management system.
-
表 1 部分轨迹数据
Table 1. Part of trajectory data
时刻 纬度/(°) 经度/(°) 地速/(km·h−1) 航向/(°) 07:52:55 31.70531 118.27771 63.22200012207 58.0 07:52:56 31.70567 118.83351 63.73600006103 58.0 07:52:57 31.70580 118.83373 63.73600006104 58.0  下载: 导出CSV
下载: 导出CSV
表 2 多模型轨迹预测结果的RMSE
Table 2. RMSE of multi-model trajectory prediction results
模型 RMSE 经度 纬度 总体 RNN 0.00304 0.00644 0.00474 LSTM 0.00256 0.00310 0.00283 GRU 0.00142 0.00264 0.00213 本文模型 0.00155 0.00101 0.00128
下载: 导出CSV
-
[1] ZHANG X W, YU W Z. Research on the application of Kalman filter algorithm in aircraft trajectory analysis[C]//Proceedings of the 7th International Conference on Intelligent Computing and Signal Processing. Piscataway: IEEE Press, 2022: 196-199. [2] 吕波, 王超. 改进的扩展卡尔曼滤波在航空器4D航迹预测算法中的应用[J]. 计算机应用, 2021, 41(S1): 277-282.LU B, WANG C. Application of improved extended Kalman filter in 4D flight path prediction algorithm of aircraft[J]. Journal of Computer Applications, 2021, 41(S1): 277-282(in Chinese). [3] SCHIMPF N, KNOBLOCK E J, WANG Z, et al. Flight trajectory prediction based on hybrid-recurrent networks[C]//Proceedings of the IEEE Cognitive Communications for Aerospace Applications Workshop. Piscataway: IEEE Press, 2021: 1-6. [4] PANG Y T, LIU Y M. Conditional generative adversarial networks (CGAN) for aircraft trajectory prediction considering weather effects[C]//Proceedings of the AIAA Scitech 2020 Forum. Reston: AIAA, 2020. [5] 陈明强, 傅嘉赟. 基于无迹卡尔曼滤波的飞行航迹预测方法研究[J]. 计算机仿真, 2021, 38(6): 27-30. doi: 10.3969/j.issn.1006-9348.2021.06.006CHEN M Q, FU J Y. Research on flight path prediction method based on untraced Kalman filter[J]. Computer Simulation, 2021, 38(6): 27-30(in Chinese). doi: 10.3969/j.issn.1006-9348.2021.06.006 [6] 刘浩然, 覃玉华, 邓玉静, 等. 基于双层修正无迹卡尔曼的水下节点定位算法[J]. 仪器仪表学报, 2020, 41(3): 142-149.LIU H R, QIN Y H, DENG Y J, et al. An underwater node localization algorithm based on double layer modified unscented Kalman filter[J]. Chinese Journal of Scientific Instrument, 2020, 41(3): 142-149(in Chinese). [7] 尹聚祺, 杨震, 罗亚中, 等. 空间机动目标跟踪的改进自适应IMM算法[J]. 系统工程与电子技术, 2021, 43(12): 3658-3666. doi: 10.12305/j.issn.1001-506X.2021.12.29YIN J Q, YANG Z, LUO Y Z, et al. Improved adaptive IMM algorithm for space maneuvering target tracking[J]. Systems Engineering and Electronics, 2021, 43(12): 3658-3666(in Chinese). doi: 10.12305/j.issn.1001-506X.2021.12.29 [8] GUO G, ZHAO S J. 3D multi-object tracking with adaptive cubature Kalman filter for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(1): 512-519. doi: 10.1109/TIV.2022.3158419 [9] QIAO S J, HAN N, ZHU X W, et al. A dynamic trajectory prediction algorithm based on Kalman filter[J]. Acta Electronica Sinica, 2018, 46(2): 418-423. [10] LIU W S, LIANG X, ZHENG M H. Dynamic model informed human motion prediction based on unscented Kalman filter[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 5287-5295. doi: 10.1109/TMECH.2022.3173167 [11] 谢磊, 丁达理, 魏政磊, 等. AdaBoost-PSO-LSTM网络实时预测机动轨迹[J]. 系统工程与电子技术, 2021, 43(6): 1651-1658. doi: 10.12305/j.issn.1001-506X.2021.06.23XIE L, DING D L, WEI Z L, et al. Real time prediction of maneuver trajectory by AdaBoost-PSO-LSTM network[J]. Systems Engineering and Electronic Technology, 2021, 43(6): 1651-1658(in Chinese). doi: 10.12305/j.issn.1001-506X.2021.06.23 [12] 王新, 杨任农, 左家亮. 基于HPSO-TPFENN的目标机轨迹预测[J]. 西北工业大学学报, 2019, 37(3): 612-620. doi: 10.3969/j.issn.1000-2758.2019.03.025WANG X, YANG R N, ZUO J L. Trajectory prediction of target aircraft based on HPSO-TPFENN neural network[J]. Journal of Northwestern Polytechnical University, 2019, 37(3): 612-620(in Chinese). doi: 10.3969/j.issn.1000-2758.2019.03.025 [13] MA L, TIAN S. A hybrid CNN-LSTM model for aircraft 4D trajectory prediction[J]. IEEE Access, 2020, 8: 134668-134680. doi: 10.1109/ACCESS.2020.3010963 [14] SHI Z Y, XU M, PAN Q. 4-D flight trajectory prediction with constrained LSTM network[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(11): 7242-7255. doi: 10.1109/TITS.2020.3004807 [15] 吉瑞萍, 张程祎, 梁彦, 等. 基于LSTM的弹道导弹主动段轨迹预报[J]. 系统工程与电子技术, 2022, 44(6): 1968-1976. doi: 10.12305/j.issn.1001-506X.2022.06.24JI R P, ZHANG C Y, LIANG Y, et al. Trajectory prediction of boost-phase ballistic missile based on LSTM[J]. Systems Engineering and Electronics, 2022, 44(6): 1968-1976(in Chinese). doi: 10.12305/j.issn.1001-506X.2022.06.24 [16] 杨春伟, 刘炳琪, 王继平, 等. 基于注意力机制的高超声速飞行器LSTM智能轨迹预测[J]. 兵工学报, 2022, 43(S2): 78-86. doi: 10.12382/bgxb.2022.B002YANG C W, LIU B Q, WANG J P, et al. LSTM intelligent trajectory prediction for hypersonic vehicles based on attention mechanism[J]. Acta Armamentarii, 2022, 43(S2): 78-86(in Chinese). doi: 10.12382/bgxb.2022.B002 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 596
- HTML全文浏览量: 153
- PDF下载量: 5
- 被引次数: 0
