



-
摘要:
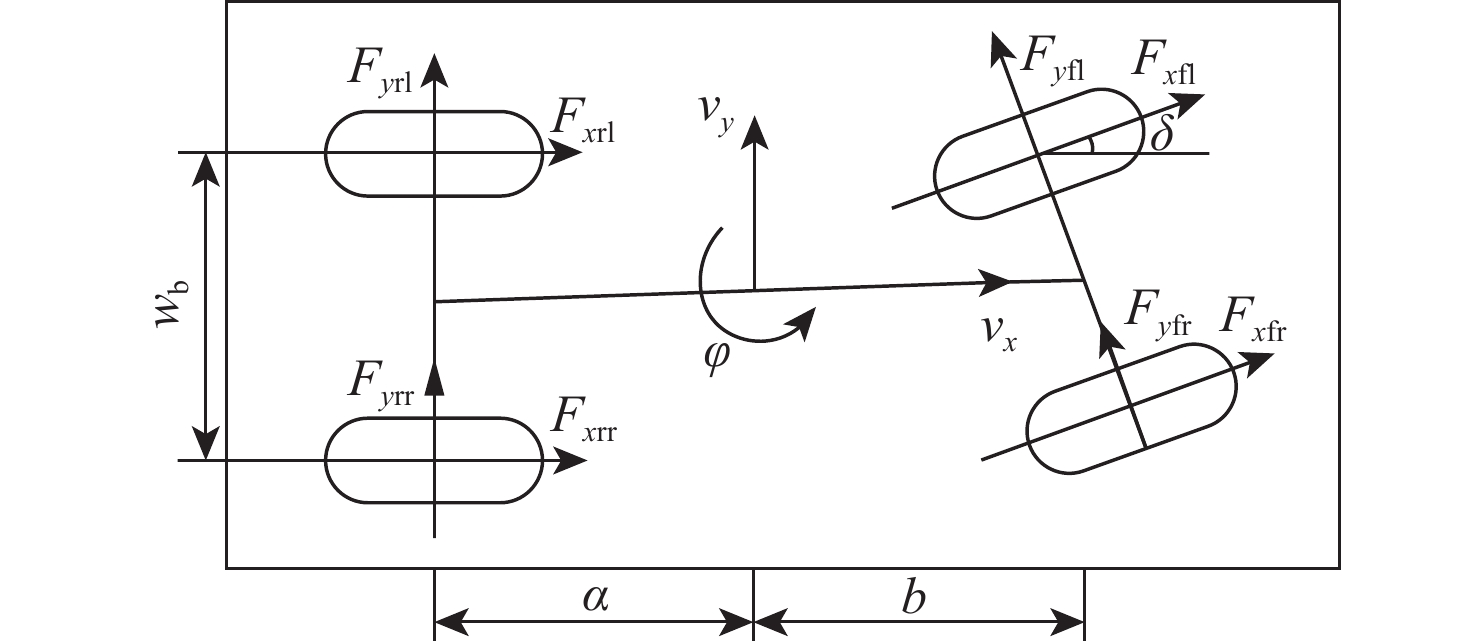
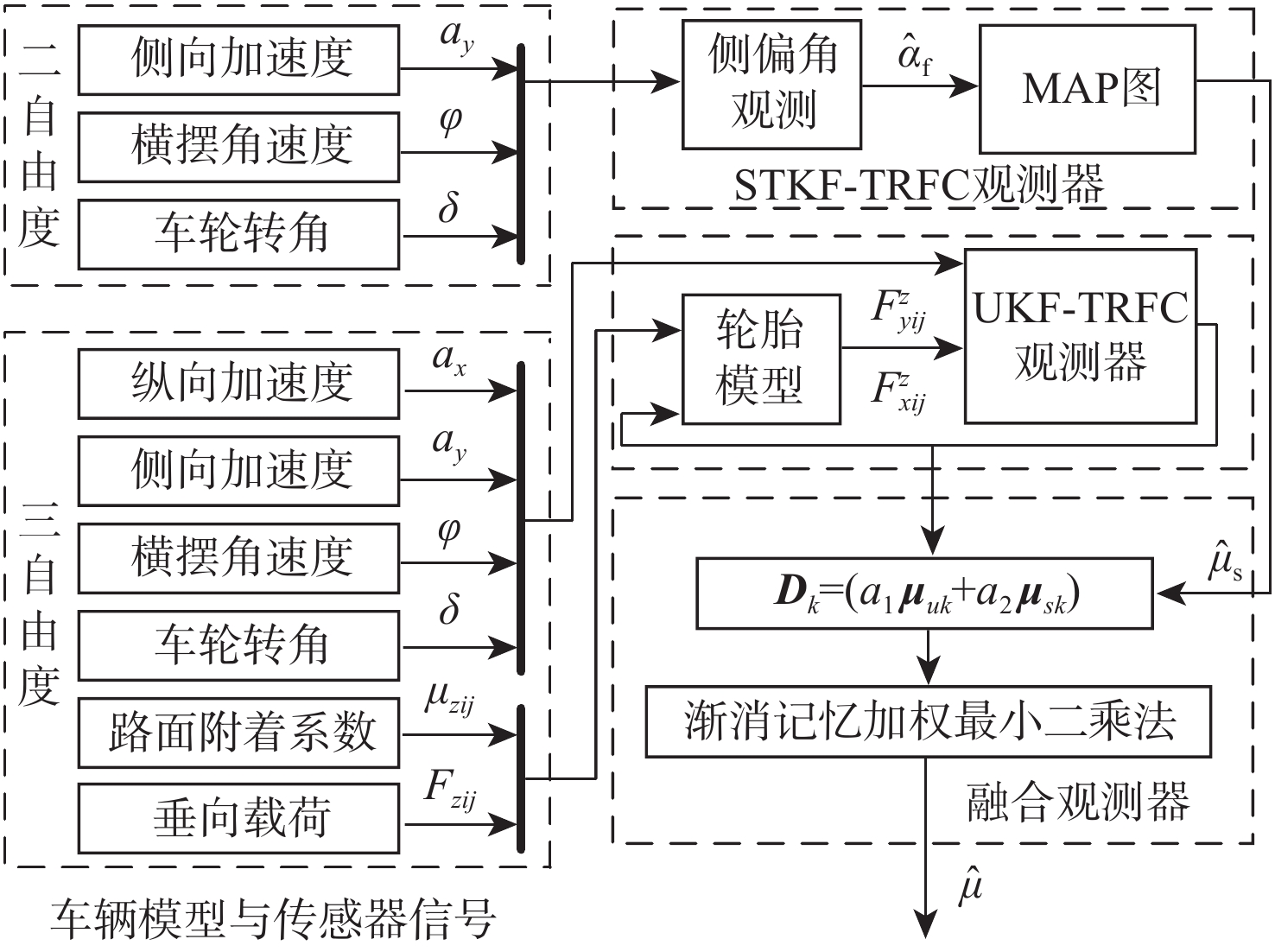
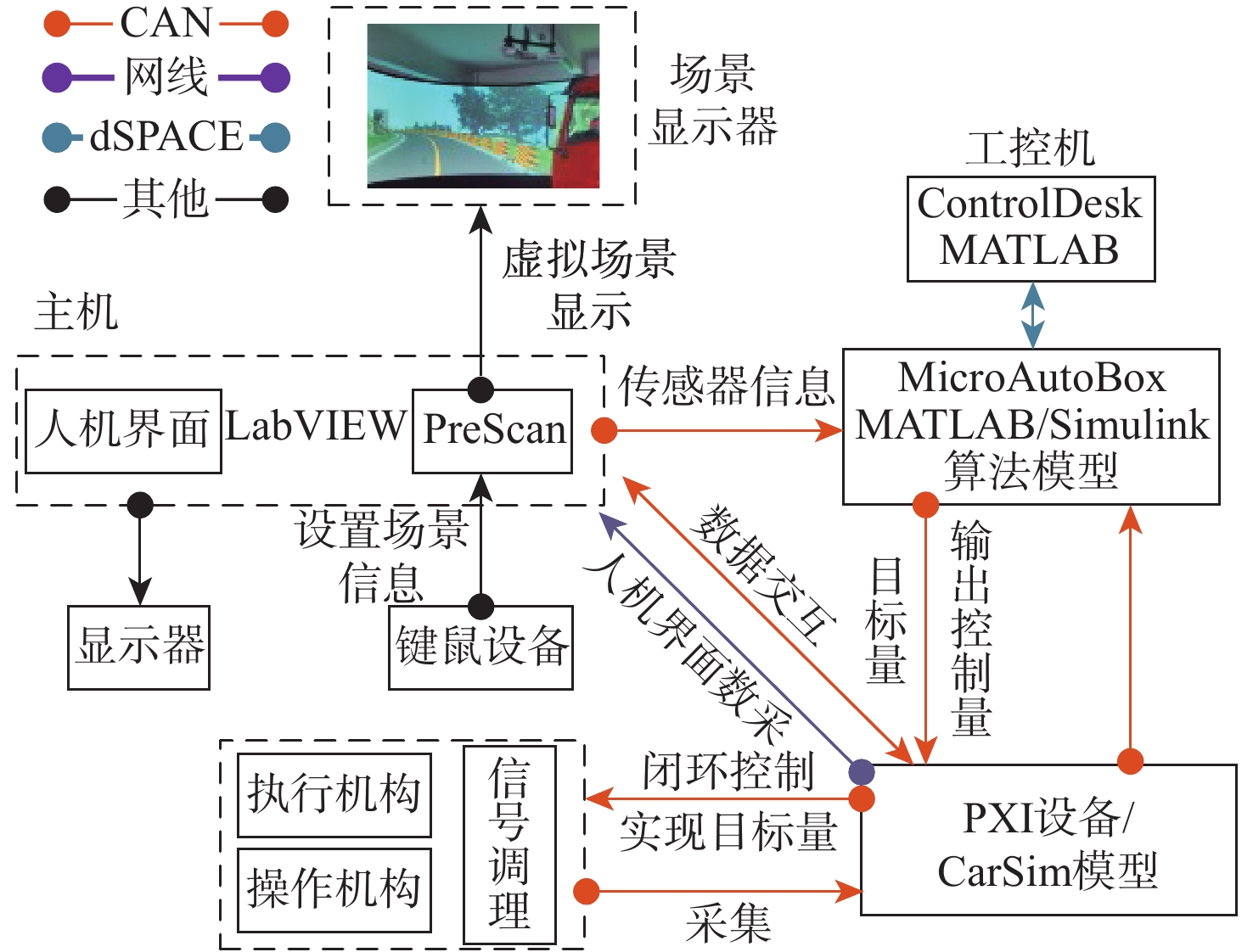
路面附着系数(TRFC)是影响汽车行驶稳定性与动力学控制的关键因素,而采用非线性模型的无迹卡尔曼滤波(UKF)-TRFC观测器在车辆起步或路面条件发生突变时收敛较慢,采用线性模型的强跟踪卡尔曼滤波(STKF)-TRFC观测器在较大侧向加速度工况下精度显著降低。因此,提出一种基于UKF和STKF融合的TRFC观测方法。建立面向控制的线性二自由度和非线性三自由度车辆模型、Dugoff轮胎模型;基于线性车辆模型并引入时变渐消因子,设计了STKF-TRFC观测器;基于非线性车辆模型和轮胎模型建立UKF-TRFC观测器;探索轮胎侧向线性区域与非线性区域之间的临界点,在临界区域利用渐消记忆加权最小二乘法对2种观测器结果进行融合。硬件在环仿真试验结果表明:所提方法对车速与路面条件变化表现出较强的鲁棒性与精确性,相比单一STKF-TRFC观测器和UKF-TRFC观测器,其平均绝对误差最高分别降低了94.9%和78.1%,其均方根误差最高分别降低了59.2%和56.9%。
Abstract:The tire-road friction coefficient (TRFC) is an essential factor affecting driving stability and dynamic control of the automobile. However, when the car is starting or the road conditions change suddenly, the unscented Kalman (UKF) based TRFC observer using a nonlinear model converges slowly; under conditions of large lateral acceleration, the accuracy of the strong tracking Kalman (STKF) based TRFC observer using a linear model significantly decreases Therefore, a TRFC observation method based on the fusion of UKF and STKF is proposed. The control-oriented two-degree of freedom linear and three-degree-of-freedom nonlinear vehicle models, the Dugoff tire model are established. A STKF-TRFC observer is designed based on a linear vehicle model and a time-varying fading factor, a UKF-TRFC observer is established based on a nonlinear vehicle model and tire model. The critical point between linear and nonlinear tire lateral dynamics is explored, and the fading memory weighted least squares method is used to fuse the two observers in the critical region. The hardware-in-the-loop simulation results show that the proposed fusion observation method exhibits strong robustness and accuracy against changes in vehicle speed and road conditions. Its root mean square error drops by up to 59.2% and 56.9%, respectively, and its mean absolute error drops by up to 94.9% and 78.1% when compared to the single STRK-TRFC or UKF-TRFC observer.
-
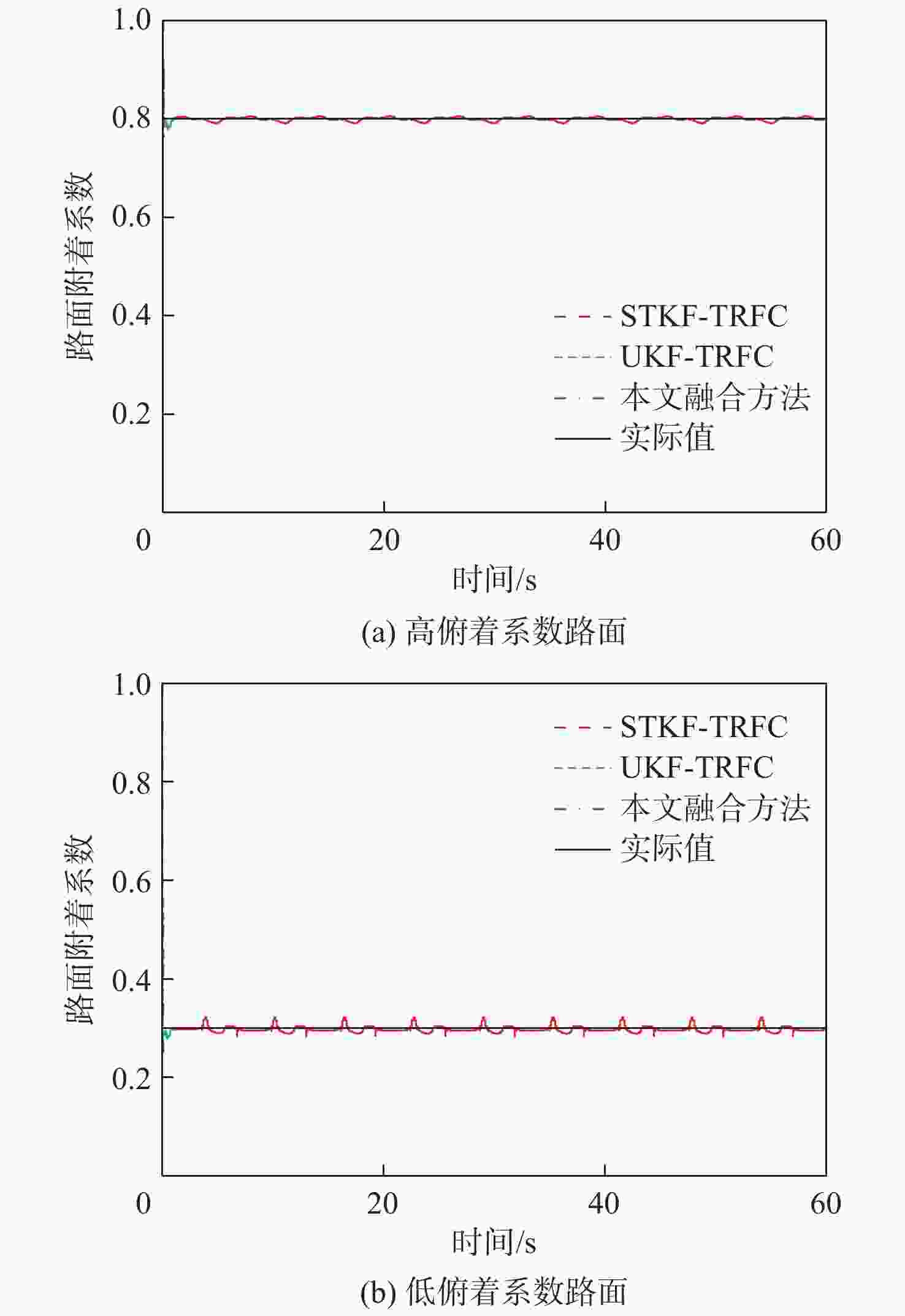
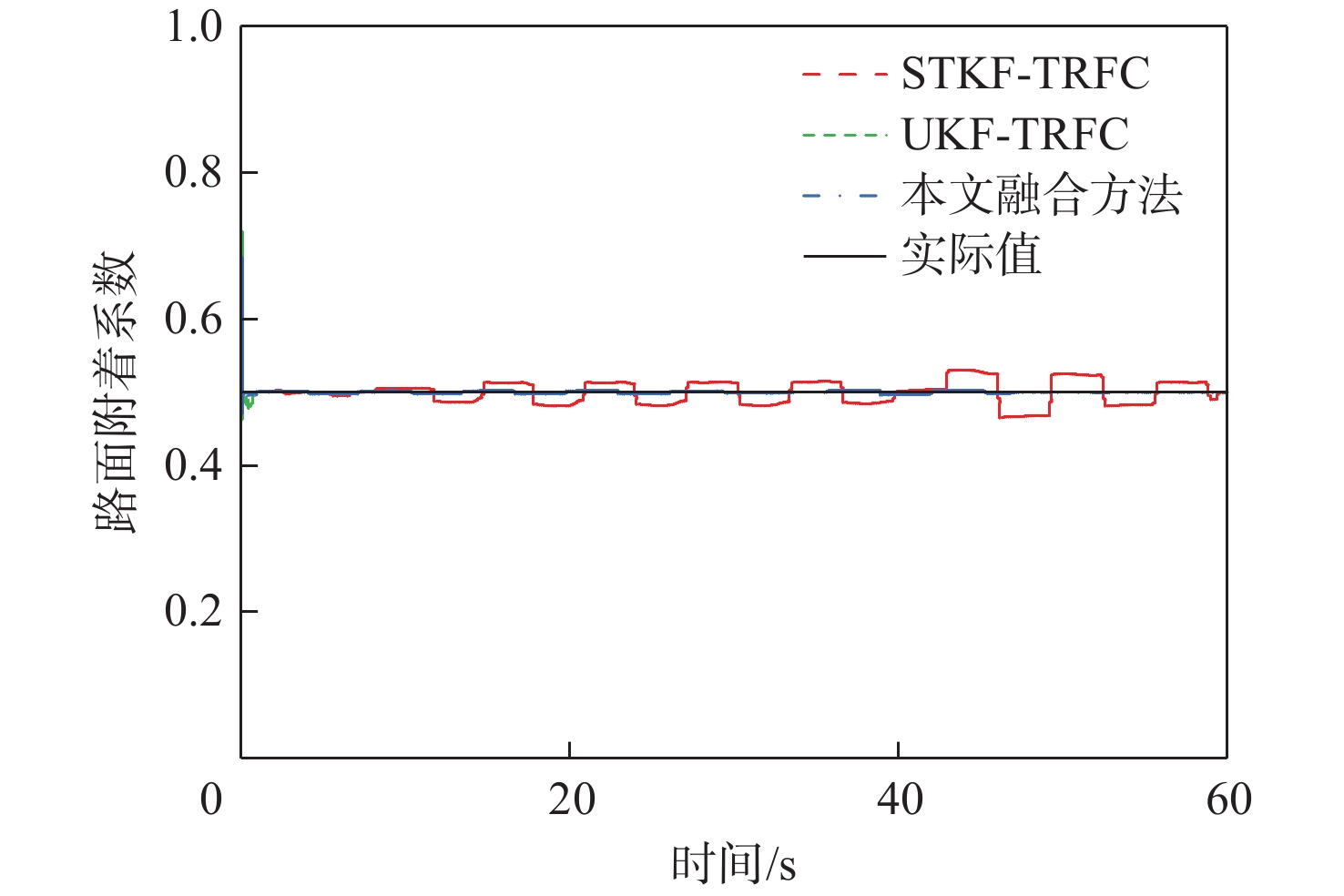
图 6 定车速定路面附着系数HIL测试结果
Figure 6. HIL test results under constant speed and tire-road friction coefficient
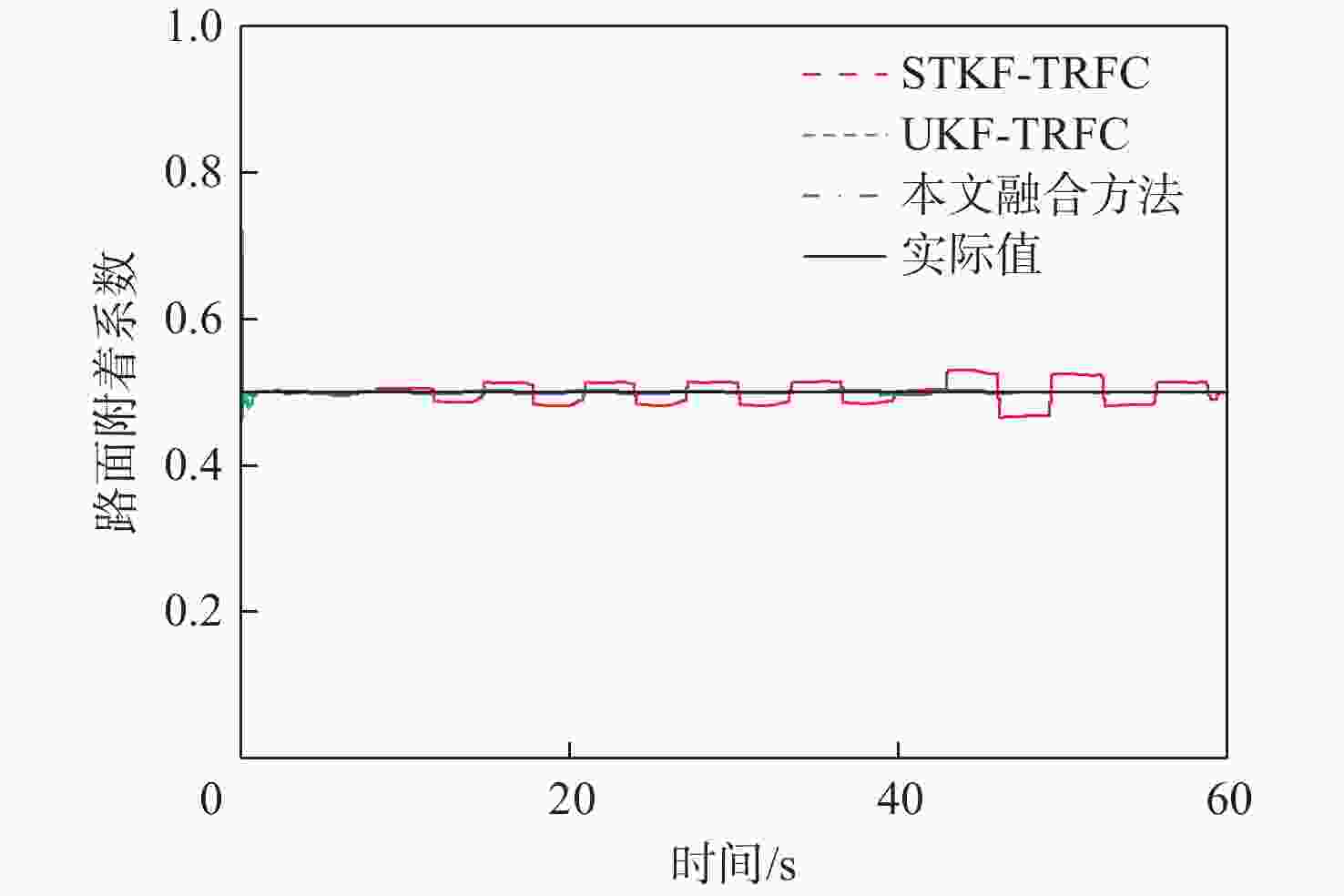
图 7 变车速定路面附着系数HIL测试结果
Figure 7. HIL test results under variable speed and constant tire-road friction coefficient
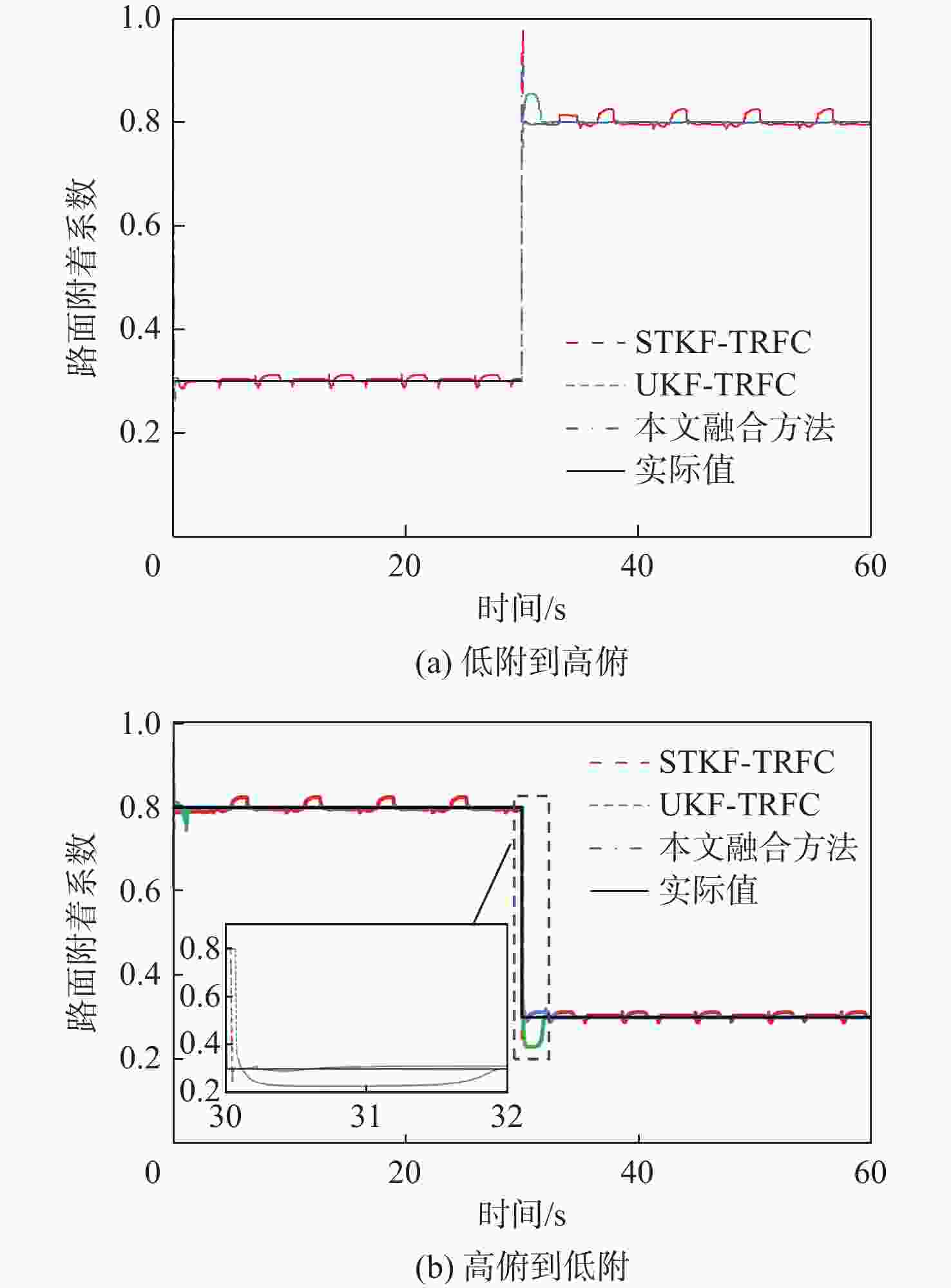
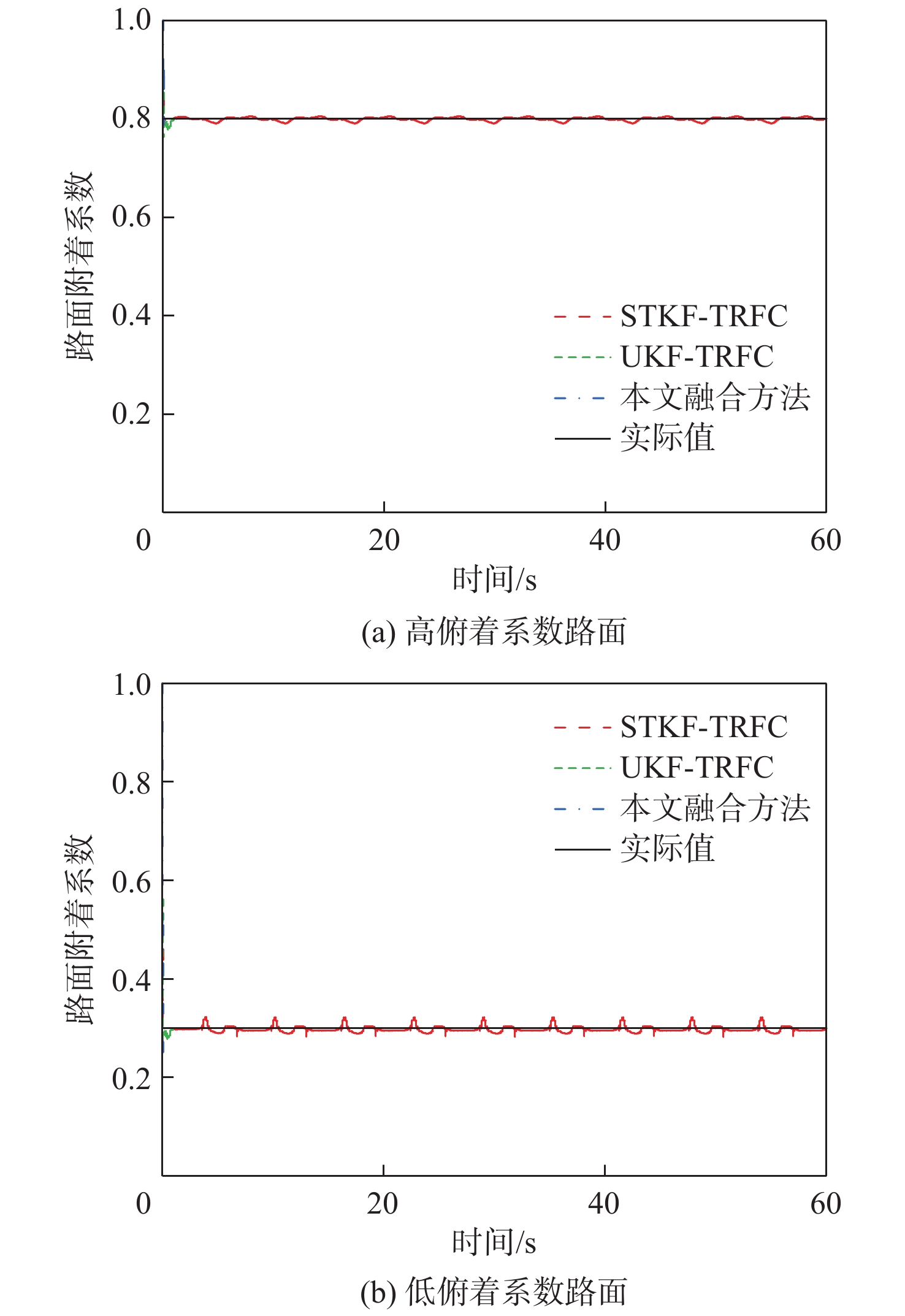
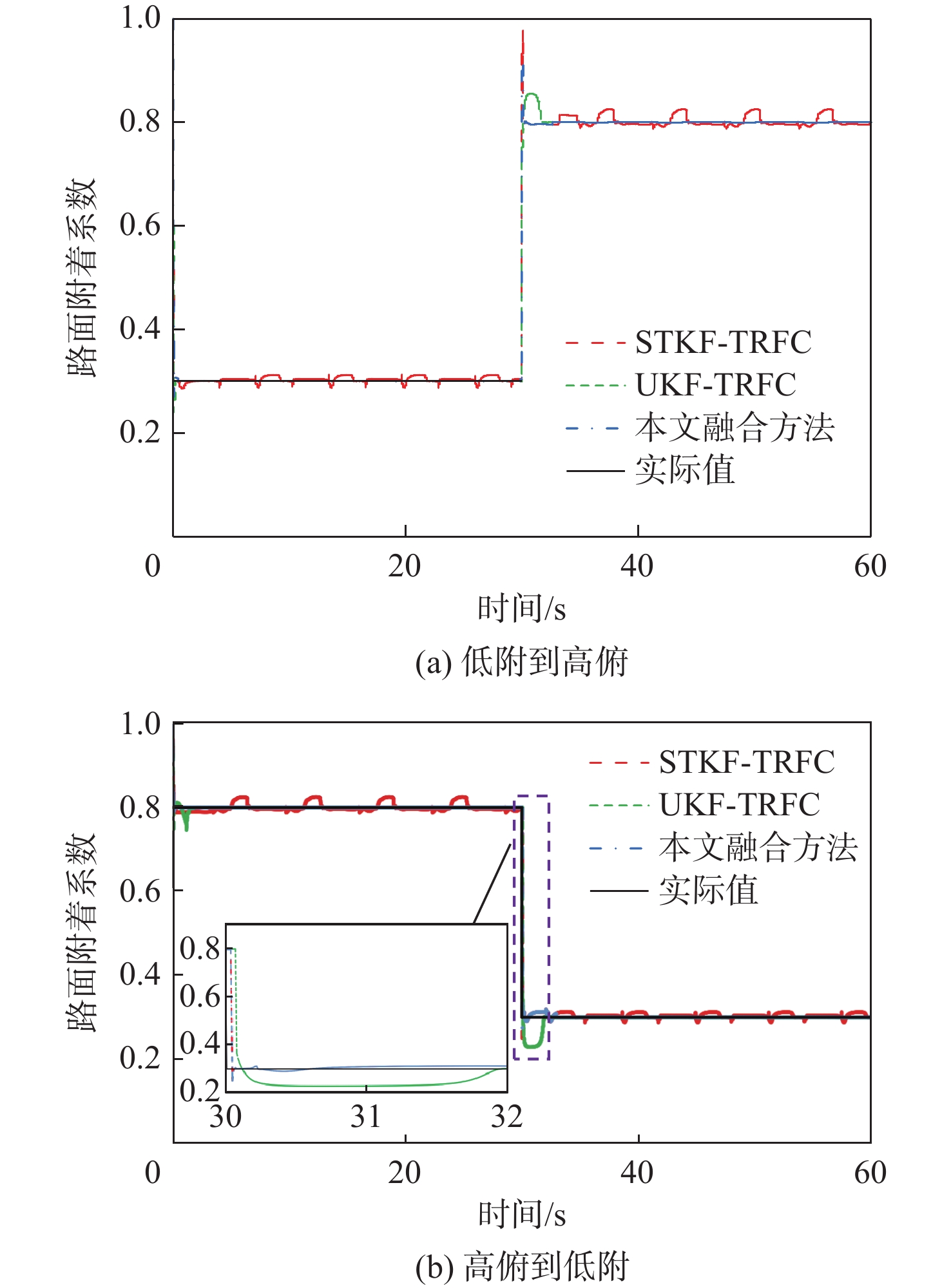
图 8 定车速变路面附着系数HIL测试结果
Figure 8. HIL test results under constant speed and variable tire-road friction coefficient
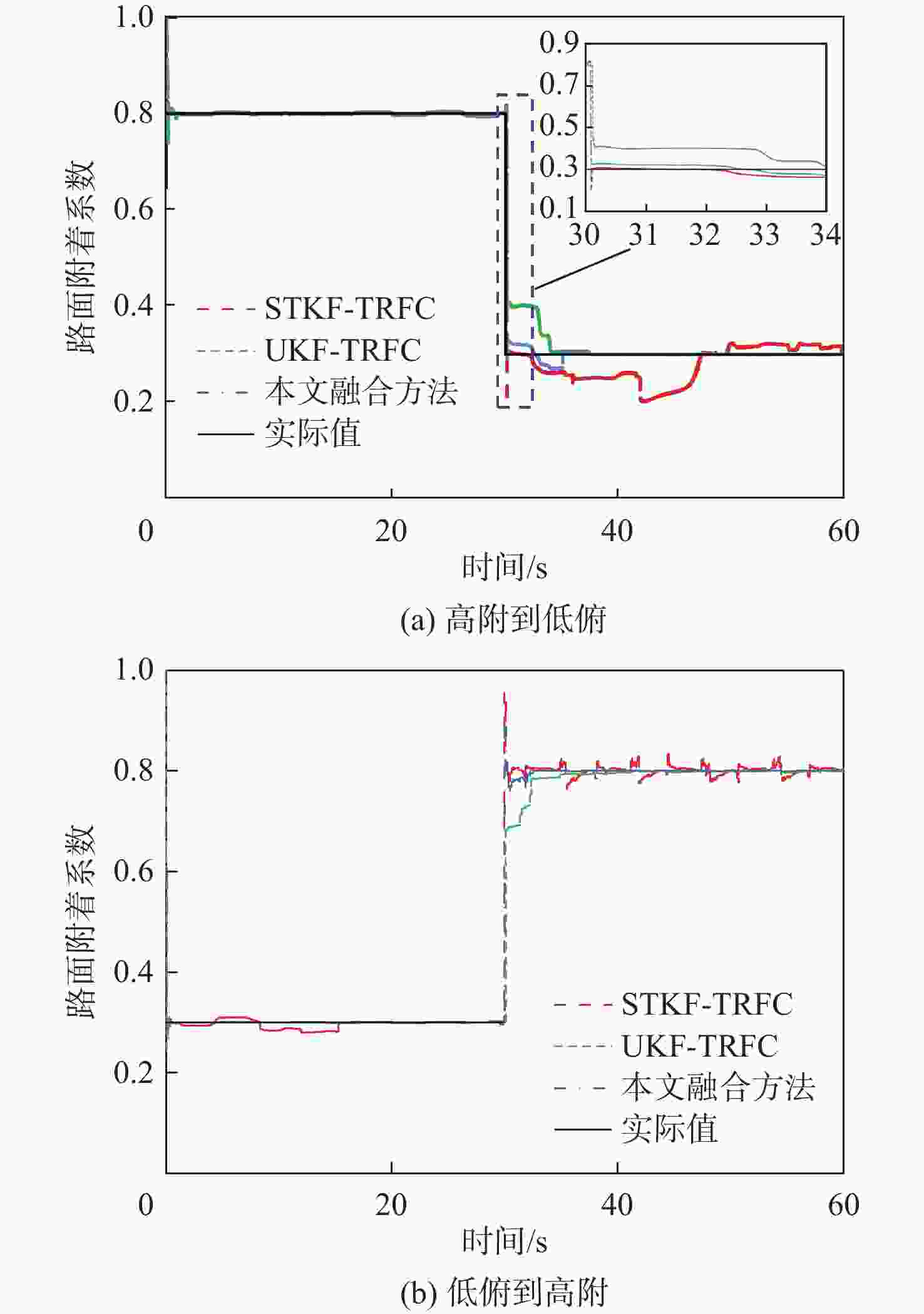
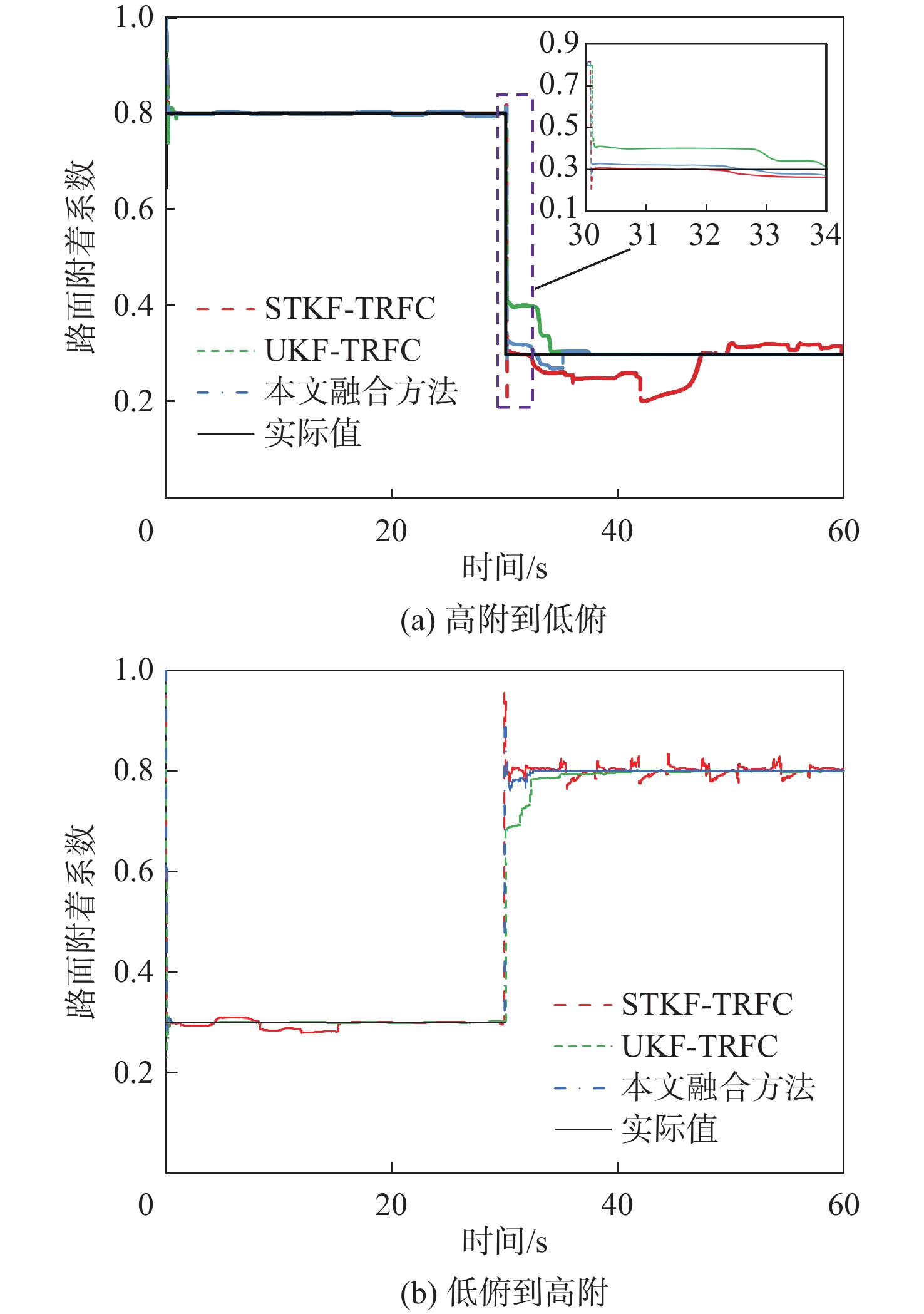
图 9 变车速变路面附着系数HIL测试结果
Figure 9. HIL test results under variable speed and tire-road friction coefficient
表 1 仿真车辆模型参数
Table 1. Simulate vehicle model parameters
参数 数值 车身绕z轴转动惯量Iz/(kg·m2) 700 车辆质量m/kg 600 质心距离前轴的距离b/m 1 质心距离后轴的距离a/m 1.26 前后轴距l/m 2.26 车轮有效滚动半径re/m 0.37 质心高度hg/m 0.45 轮距wb/m 1.5  下载: 导出CSV
下载: 导出CSV
表 2 观测结果平均绝对误差统计
Table 2. Statistics of average absolute error of observation results
工况 平均绝对误差 误差对比/% STKF-TRFC UKF-TRFC 本文融合方法 本文融合方法与STKF-TRFC 本文融合方法与UKF-TRFC 定车速定路面 0.00313 0.00034 0.00016 −94.9 −52.9 变车速定路面 0.01351 0.00183 0.00169 −87.5 −7.7 定车速变路面 0.00659 0.00152 0.00062 −90.6 −59.2 变车速变路面 0.01751 0.00687 0.00303 −82.7 −55.9
下载: 导出CSV
表 3 观测结果均方根误差统计
Table 3. Statistics of root mean square error of observation results
工况 均方根误差 误差对比/% STKF-TRFC UKF-TRFC 本文融合方法 本文融合方法与STKF-TRFC 本文融合方法与UKF-TRFC 定车速定路面 0.00475 0.00308 0.00261 −55.1 −15.3 变车速定路面 0.01721 0.00692 0.00674 −60.8 −2.7 定车速变路面 0.01574 0.01323 0.01234 −21.6 −6.7 变车速变路面 0.03085 0.02286 0.00985 −78.1 −56.9
下载: 导出CSV
-
[1] 李岩松. 汽车自适应多级制动AEB控制策略研究[D]. 北京: 北京工业大学, 2022.LI Y S. Research on AEB control strategy of vehicle adaptive multi-stage braking[D]. Beijing : Beijing University of Technology, 2022(in Chinese). [2] 王震坡, 丁晓林, 张雷. 四轮轮毂电机驱动电动汽车驱动防滑控制关键技术综述[J]. 机械工程学报, 2019, 55(12): 99-120. doi: 10.3901/JME.2019.12.099WANG Z P, DING X L, ZHANG L. Overview on key technologies of acceleration slip regulation for four-wheel-independently-actuated electric vehicles[J]. Journal of Mechanical Engineering, 2019, 55(12): 99-120(in Chinese). doi: 10.3901/JME.2019.12.099 [3] KHALEGHIAN S, EMAMI A, TAHERI S. A technical survey on tire-road friction estimation[J]. Friction, 2017, 5(2): 123-146. doi: 10.1007/s40544-017-0151-0 [4] ALBINSSON A, BRUZELIUS F, JACOBSON B, et al. Design of tyre force excitation for tyre–road friction estimation[J]. Vehicle System Dynamics, 2017, 55(2): 208-230. doi: 10.1080/00423114.2016.1251598 [5] SHAO L, JIN C, EICHBERGER A, et al. Grid search based tire-road friction estimation[J]. IEEE Access, 2020, 8: 81506-81525. doi: 10.1109/ACCESS.2020.2991792 [6] 余卓平, 曾德全, 熊璐, 等. 基于激光雷达的无人车路面附着系数估计[J]. 华中科技大学学报(自然科学版), 2019, 47(7): 124-127.YU Z P, ZENG D Q, XIONG L, et al. Road adhesion coefficient estimation for unmanned vehicle based on lidar[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2019, 47(7): 124-127(in Chinese). [7] 方剑梅. 基于车路协同的路面-轮胎间附着系数估计及应用[D]. 西安: 长安大学, 2022.FANG J M. Estimation and application of adhesion coefficient between pavement and tire based on vehicle-road coordination[D]. Xi’an: Changan University, 2022(in Chinese). [8] 何中正. 基于多传感器数据融合的路面附着系数估计[D]. 长春: 吉林大学, 2021.HE Z Z. Estimation of pavement adhesion coefficient based on multi-sensor data fusion[D]. Changchun: Jilin University, 2021(in Chinese). [9] GUO H Y, ZHAO X, LIU J, et al. A fusion estimation of the peak tire–road friction coefficient based on road images and dynamic information[J]. Mechanical Systems and Signal Processing, 2023, 189: 110029. doi: 10.1016/j.ymssp.2022.110029 [10] LENG B, JIN D, XIONG L, et al. Estimation of tire-road peak adhesion coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion[J]. Mechanical Systems and Signal Processing, 2021, 150: 107275. doi: 10.1016/j.ymssp.2020.107275 [11] HEIDFELD H, SCHÜNEMANN M, KASPER R. UKF-based state and tire slip estimation for a 4WD electric vehicle[J]. Vehicle System Dynamics, 2020, 58(10): 1479-1496. doi: 10.1080/00423114.2019.1648836 [12] CHEN L, LUO Y G, BIAN M Y, et al. Estimation of tire-road friction coefficient based on frequency domain data fusion[J]. Mechanical Systems and Signal Processing, 2017, 85: 177-192. doi: 10.1016/j.ymssp.2016.08.006 [13] 张雷, 关可人, 丁晓林, 等. 基于图像识别与动力学融合的路面附着系数估计方法[J]. 汽车工程, 2023, 45(7): 1222-1234.ZHANG L, GUAN K R, DING X L, et al. Tire-road friction estimation method based on image recognition and dynamics fusion[J]. Automotive Engineering, 2023, 45(7): 1222-1234(in Chinese). [14] WANG X, GU L, DONG M M, et al. State estimation of tire-road friction and suspension system coupling dynamic in braking process and change detection of road adhesive ability[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(6): 1170-1187. doi: 10.1177/09544070211035298 [15] 王其东, 刘伟, 陈无畏, 等. 基于路面识别的汽车稳定系统滑模控制[J]. 汽车工程, 2018, 40(1): 82-90.WANG Q D, LIU W, CHEN W W, et al. Sliding mode control of vehicle electronic stability program based on road identification[J]. Automotive Engineering, 2018, 40(1): 82-90(in Chinese). [16] HU J Q, RAKHEJA S, ZHANG Y M. Real-time estimation of tire-road friction coefficient based on lateral vehicle dynamics[J]. Journal of Automobile Engineering, 2020, 234(10-11): 2444-2457. doi: 10.1177/0954407020929233 [17] LIU Y H, LI T, YANG Y Y, et al. Estimation of tire-road friction coefficient based on combined APF-IEKF and iteration algorithm[J]. Mechanical Systems and Signal Processing, 2017, 88: 25-35. doi: 10.1016/j.ymssp.2016.07.024 [18] 李绪龙. 基于路面附着系数的汽车防碰撞控制算法研究[D]. 合肥: 合肥工业大学, 2018.LI X L. Research on vehicle anti-collision control algorithm based on pavement adhesion coefficient[D]. Hefei: Hefei University of Technology, 2018(in Chinese). [19] 查云飞, 吕小龙, 陈慧勤, 等. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021.ZHA Y F, LÜ X L, CHEN H Q, et al. Vehicle trajectory tracking control based on road adhesion coefficient estimation[J]. Automotive Engineering, 2023, 45(6): 1010-1021(in Chinese). [20] RASOL M, SCHMIDT F, IENTILE S. FriC-PM: machine learning-based road surface friction coefficient predictive model using intelligent sensor data[J]. Construction and Building Materials, 2023, 370: 130567. doi: 10.1016/j.conbuildmat.2023.130567 [21] 丁能根. 汽车主动控制系统中参数估计的方法与应用[M]. 北京: 北京航空航天大学出版社, 2013.DING N G. Method and application of parameter estimation in automobile active control system[M]. Beijing: Beijing University of Aeronautics & Astronautics Press, 2013(in Chinese). [22] 雍加望, 李岩松, 冯能莲, 等. 基于ESHB系统的自适应自动紧急制动控制策略[J]. 汽车安全与节能学报, 2022, 13(2): 300-308.YONG J W, LI Y S, FENG N L, et al. Adaptive automatic emergency braking control strategy based on an ESHB system[J]. Journal of Automotive Safety and Energy, 2022, 13(2): 300-308(in Chinese). [23] 李刚, 解瑞春, 宗长富, 等. 基于强跟踪容积卡尔曼滤波的车辆行驶状态估计[J]. 汽车技术, 2015(9): 53-58.LI G, XIE R C, ZONG C F, et al. Research on vehicle driving state estimation based on strong tracking cubature Kalman filter[J]. Automobile Technology, 2015(9): 53-58(in Chinese). [24] DU Z L, LI X M. Strong tracking Tobit Kalman filter with model uncertainties[J]. International Journal of Control, Automation and Systems, 2019, 17(2): 345-355. doi: 10.1007/s12555-017-0655-4 [25] YONG J W, GAO F, DING N G, et al. Design and validation of an electro-hydraulic brake system using hardware-in-the-loop real-time simulation[J]. International Journal of Automotive Technology, 2017, 18(4): 603-612. doi: 10.1007/s12239-017-0060-2 [26] 李凌峰, 宫明辉, 乌江. 采用多模模型的锂离子电池荷电状态联合估计算法[J]. 西安交通大学学报, 2021, 55(1): 78-85.LI L F, GONG M H, WU J. Joint estimation algorithm for state of charge of Li-ion battery with multi-mode model[J]. Journal of Xi’an Jiaotong University, 2021, 55(1): 78-85(in Chinese). [27] JULIER S, UHLMANN J, DURRANT-WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482. doi: 10.1109/9.847726 [28] 李学鋆, 章菊. 考虑路面附着系数和车速的AFS可变传动比设计[J]. 汽车安全与节能学报, 2020, 11(3): 329-336.LI X Y, ZHANG J. Design of AFS variable steering ratio considering road adhesion coefficient and vehicle speed[J]. Journal of Automotive Safety and Energy, 2020, 11(3): 329-336(in Chinese). [29] 吴晓建. 双模式互联悬架与主动前轮转向集成控制研究[D]. 长沙: 湖南大学, 2018.WU X J. Research on integrated control of dual-mode interconnected suspension and active front wheel steering[D]. Changsha: Hunan University, 2018(in Chinese). [30] 林棻, 王少博, 赵又群, 等. 基于改进Keras模型的路面附着系数估计[J]. 机械工程学报, 2021, 57(12): 74-86. doi: 10.3901/JME.2021.12.074LIN F, WANG S B, ZHAO Y Q, et al. Road friction coefficient estimation based on improved keras model[J]. Journal of Mechanical Engineering, 2021, 57(12): 74-86(in Chinese). doi: 10.3901/JME.2021.12.074 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 365
- HTML全文浏览量: 106
- PDF下载量: 4
- 被引次数: 0
