



Orthogonality and mounting matrix calibration technology of high precision vector magnetometer
-
摘要:
矢量磁强计的非正交性与安装矩阵偏差是造成高精度矢量磁场测量误差的重要原因,提高正交性及安装矩阵定标精度,有利于进一步降低矢量磁场的测量误差。利用自研大空间磁屏蔽室、无矩校准线圈及高精度无磁转台构成的高精度定标装置,开展了高精度磁强计的地面标定测试技术研究,重点研究了磁强计正交性和安装矩阵的定标技术,基于“Thin Shell”定标方法,通过多点旋转测量磁场的方式,实现了校正后正交性残差仅为
0.0014 °,精度相比传统方法提高了一个数量级,有效降低了矢量磁强计的转向差。通过对直接测量数据进行拟合计算转换参数,获得了实验条件下传感器最佳姿态安装矩阵,其定标精度达到0.0035 °,大幅度改善了矢量磁场测量中由于安装角度偏差所带来的测量误差。Abstract:The nonorthogonality and mounting matrix deviation of vector magnetometers are important components for high-precision vector magnetic field measurement errors. Improving orthogonality and mounting matrix calibration accuracy is beneficial for further reducing measurement errors of vector magnetic fields. This article conducts ground calibration testing technology research on high-precision magnetometers using a high-precision calibration equipment made up of a calibration coil, a high-precision non-magnetic turntable, and a self-developed big space magnetic shielding chamber. The focus is on the calibration technology of the orthogonality and mounting matrix of the magnetometer. Based on the “Thin Shell” calibration method, multi-point rotation measurement was verified and high-precision orthogonality calibration was achieved. After correction, the residual was only
0.0014 °, which is an order of magnitude lower than traditional methods and effectively reduces the heading error of vector magnetometers. The ideal mounting matrix of the sensor under experimental conditions was found by fitting and calculating the conversion parameters of the direct measurement data. This resulted in a calibration accuracy of0.0035 °, significantly reducing the measurement error brought on by installation angle deviation in vector magnetic field measurement.-
Key words:
- vector magnetometer /
- orthogonality /
- mounting matrix /
- calibration technology /
- calibration residual
-
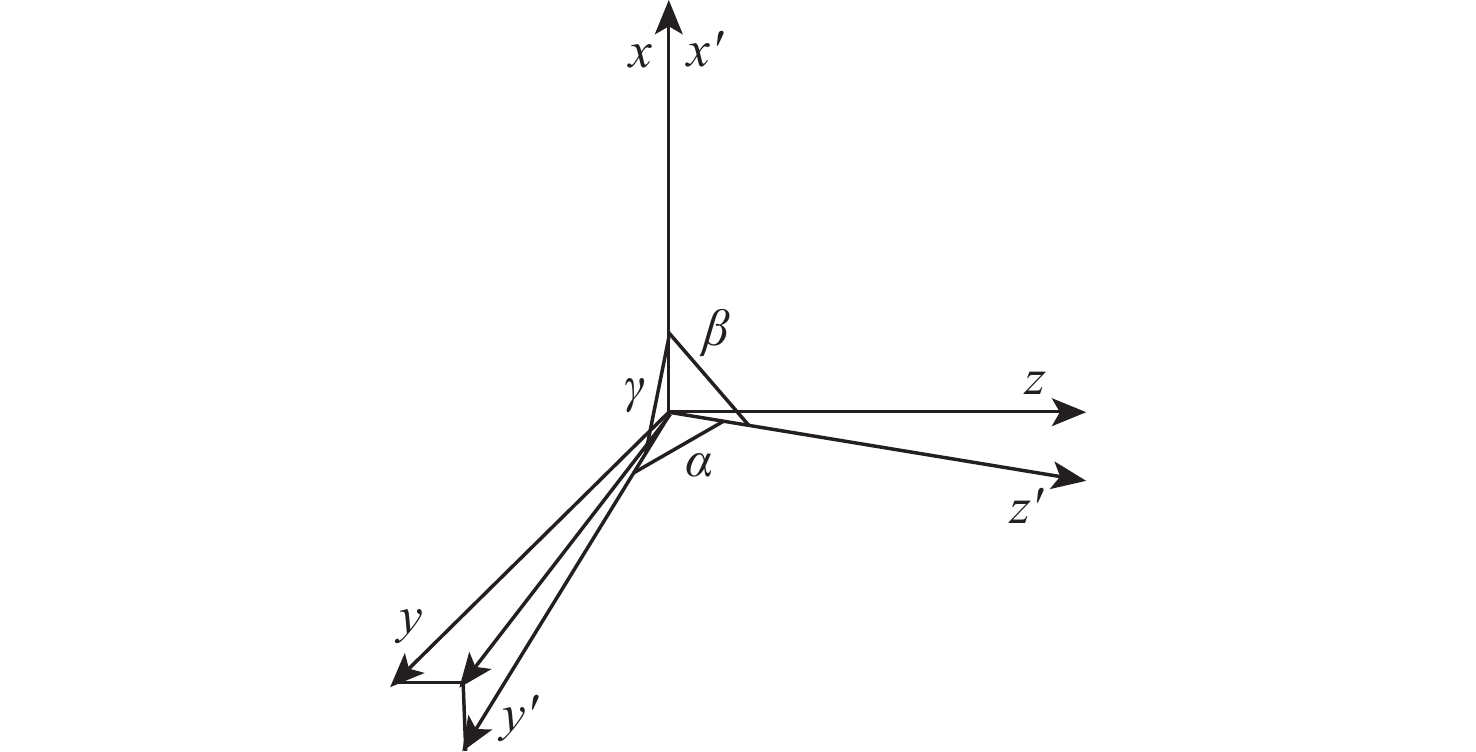
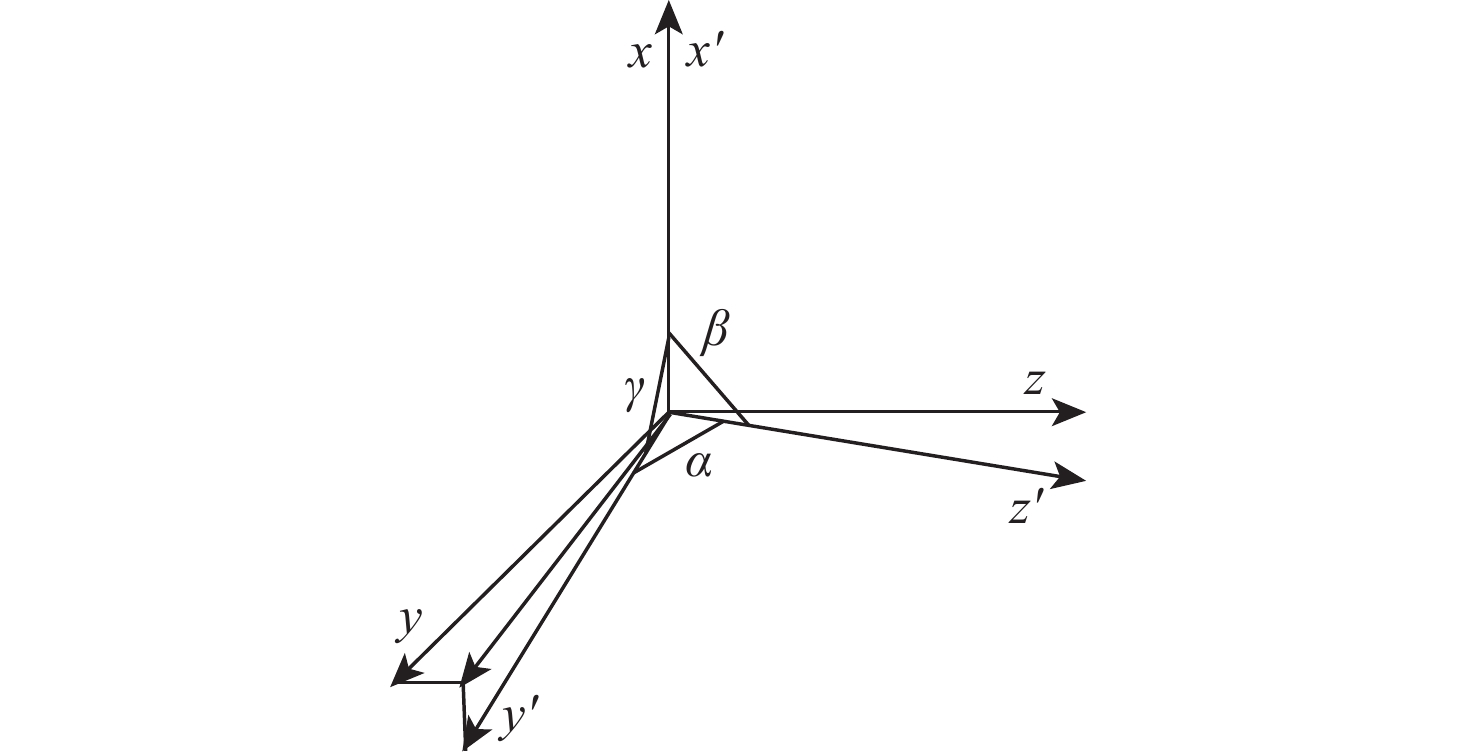
图 1 3个理想正交的磁轴x、y、z及实际中3个非正交的磁轴x$ ' $、y$ ' $、z$ ' $
Figure 1. Three orthogonal magnetic axes x, y, z and three non-orthogonal magnetic axes x$ ' $, y$ ' $, z$ ' $ in practice
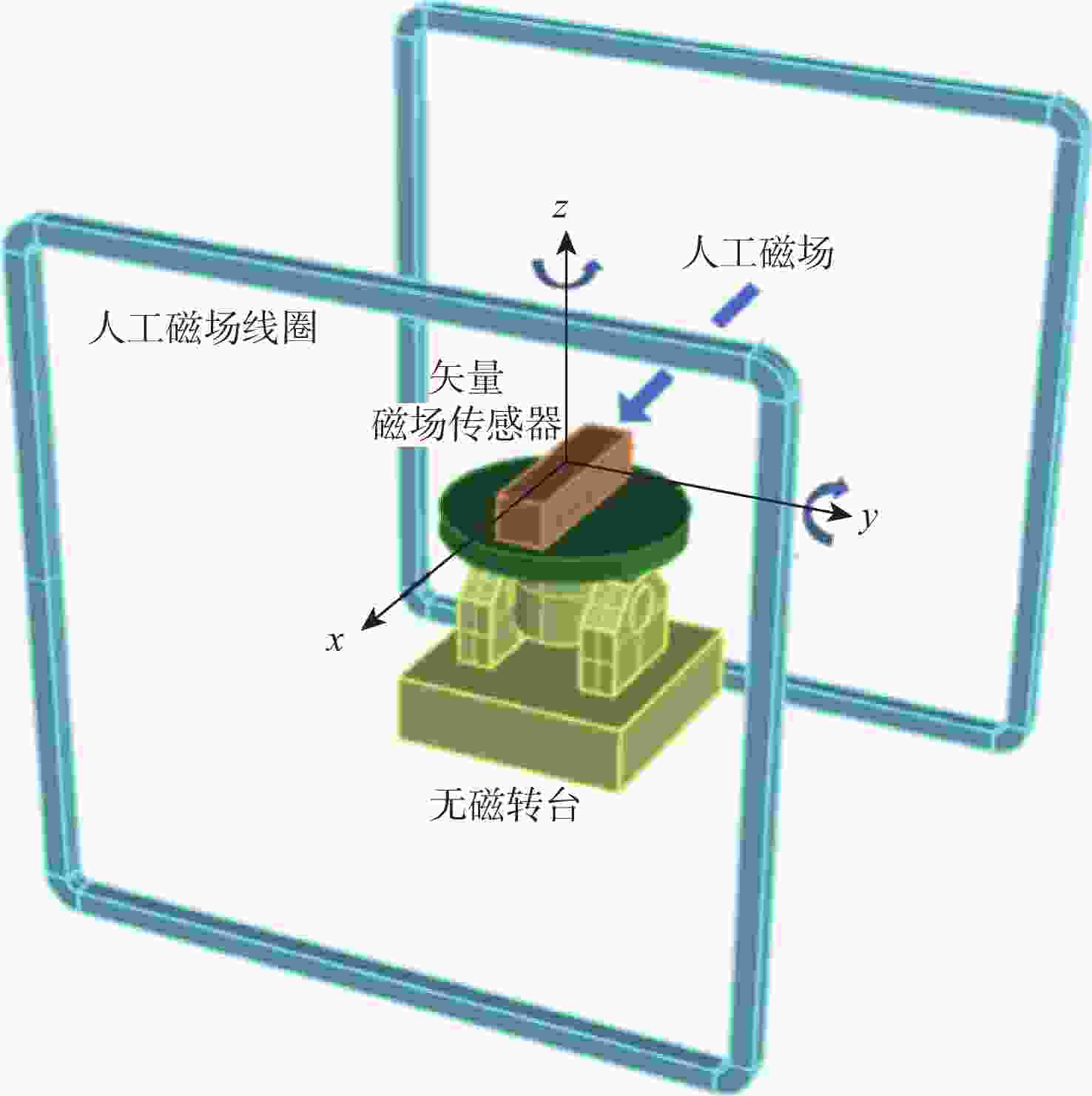
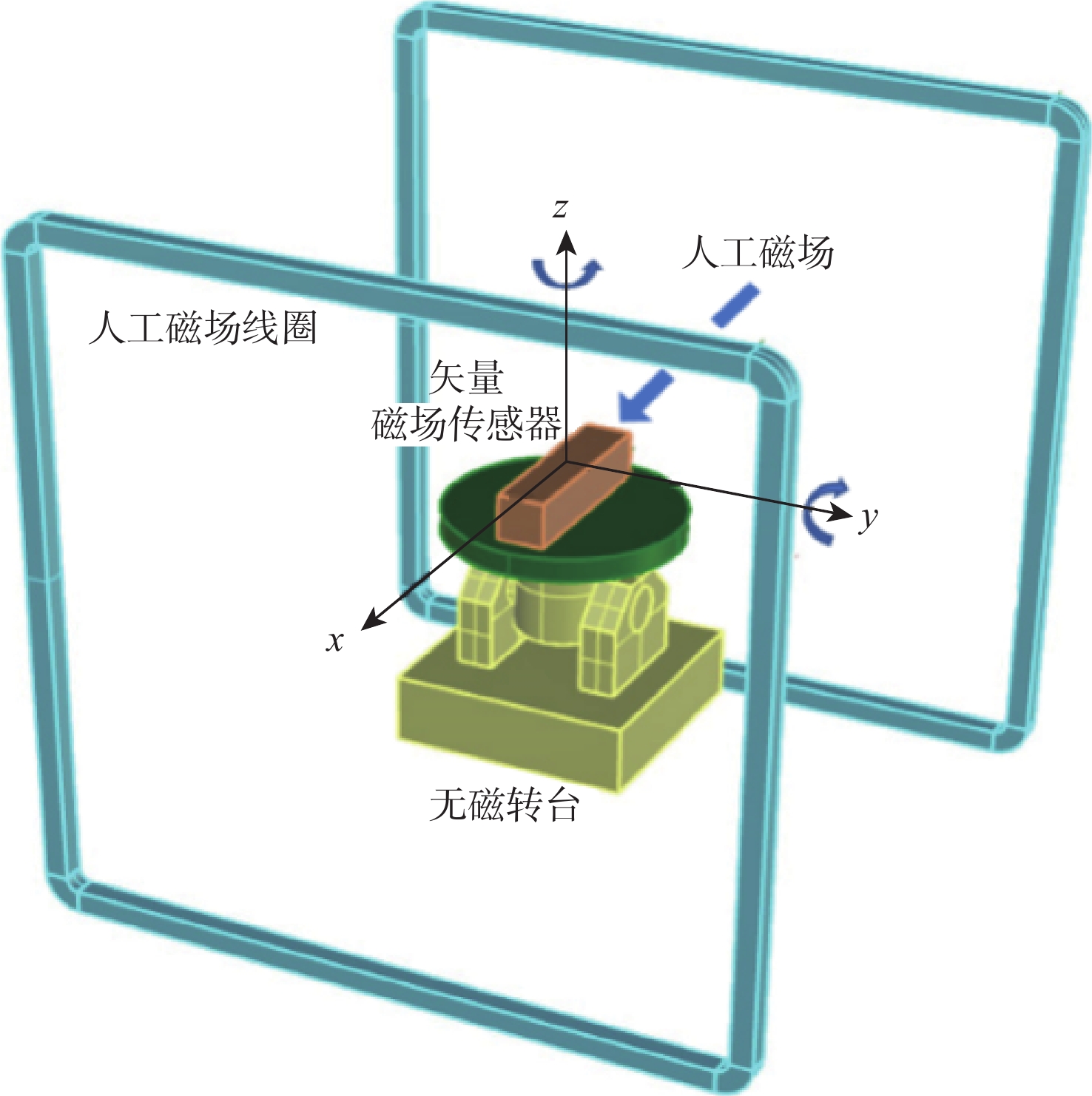
图 2 矢量磁传感器测试标定方法原理示意图
Figure 2. Schematic diagram of calibration method for vector magnetic field test

图 3 高精度正交性及安装矩阵定标测试系统
Figure 3. High-precision orthogonality and installation matrix calibration test system
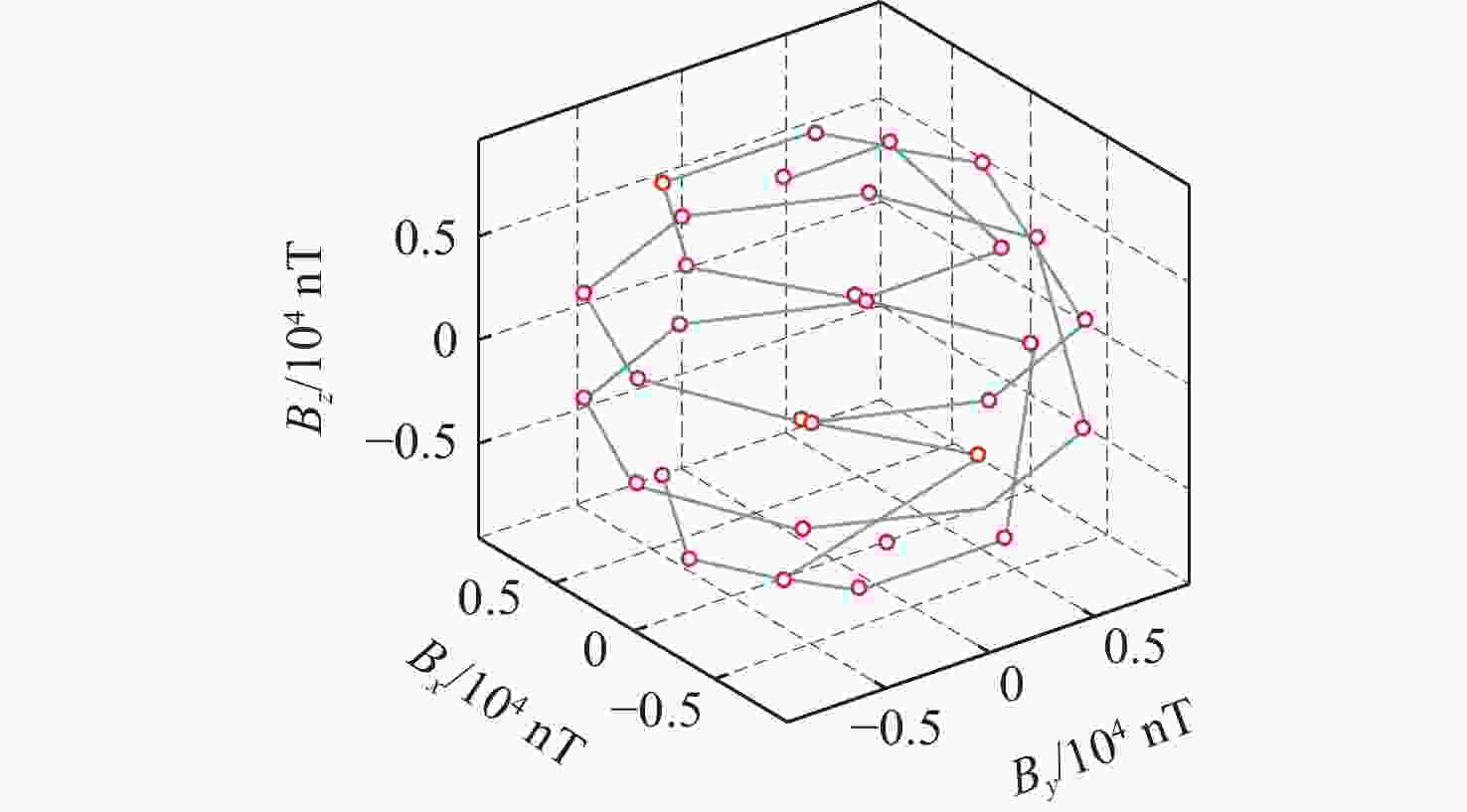
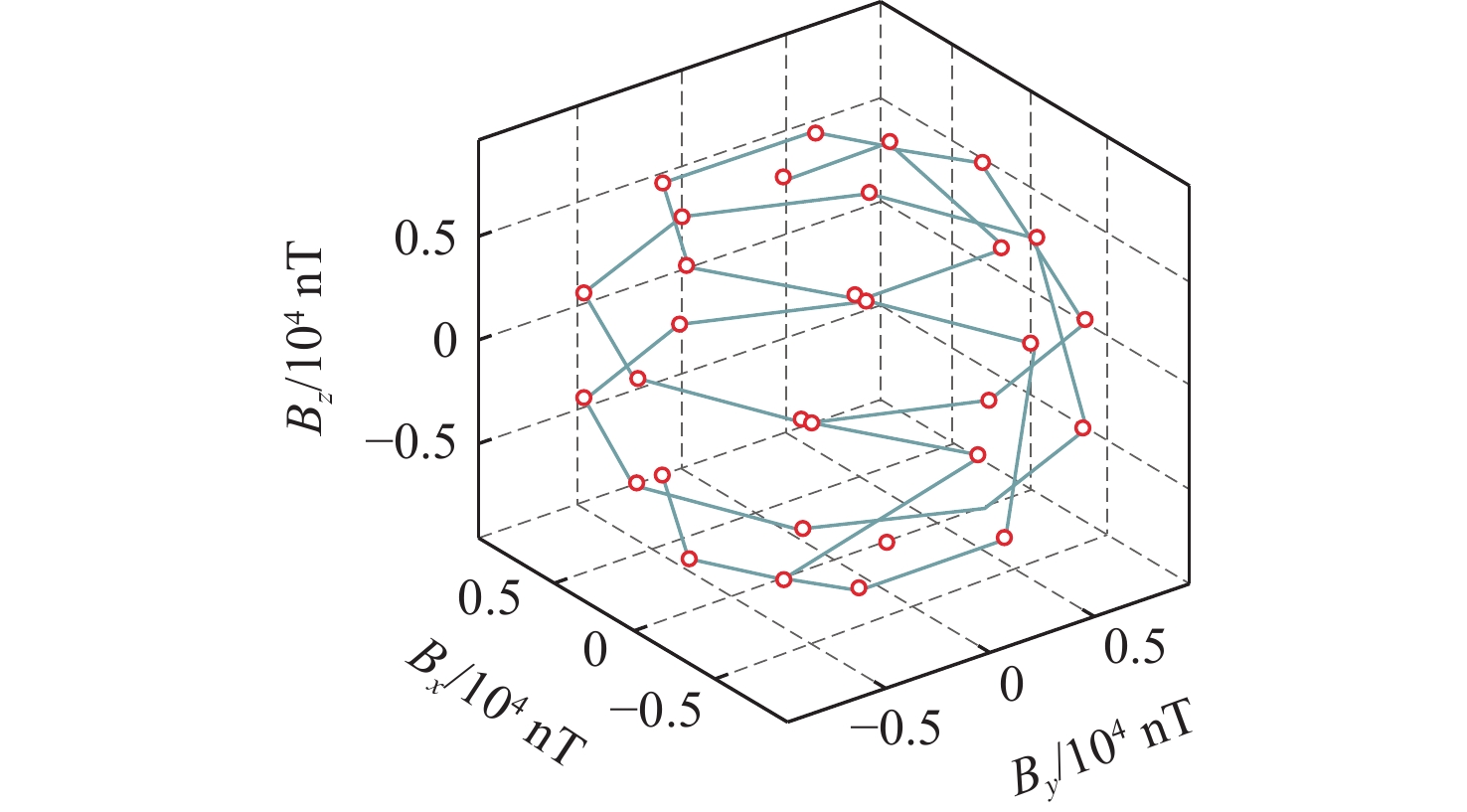
图 4 32点磁场测量矢量在磁传感器坐标中的投影
Figure 4. Projection of 32 points for magnetic field measurement vector in magnetic sensor coordinates

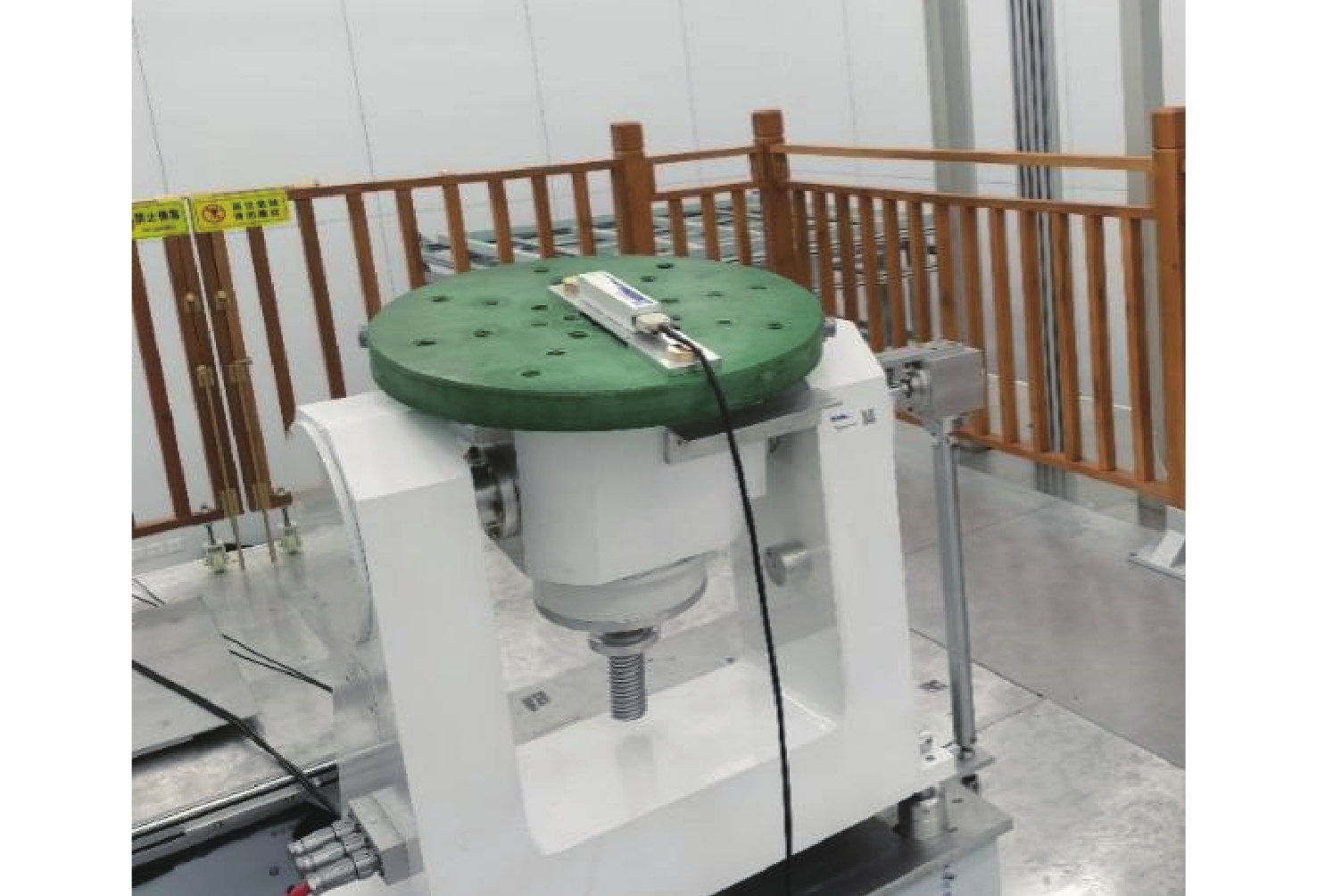
图 5 高精度磁矢量传感器现场定标试验
Figure 5. Field calibration test of high precision vector magnetometer
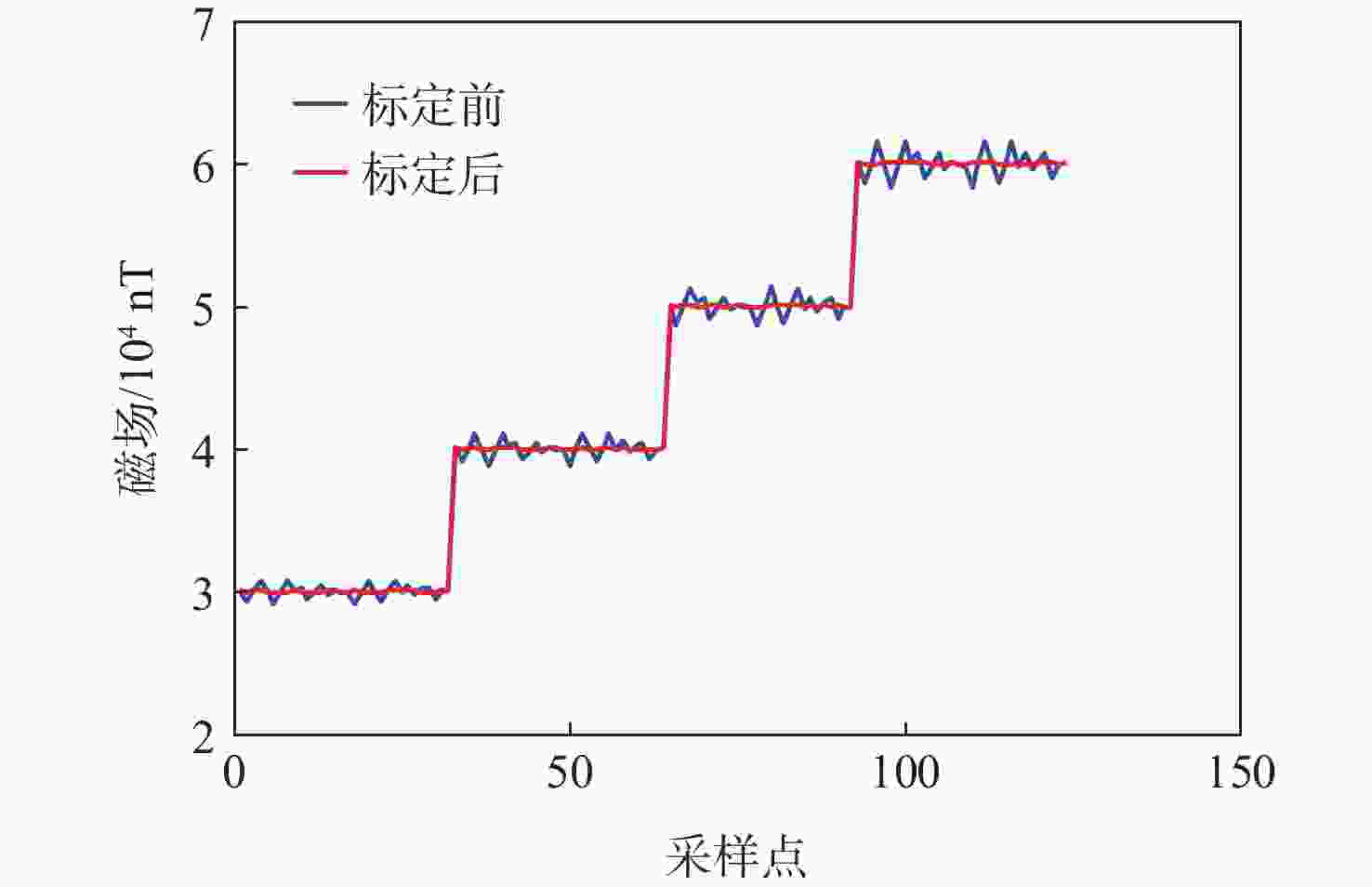
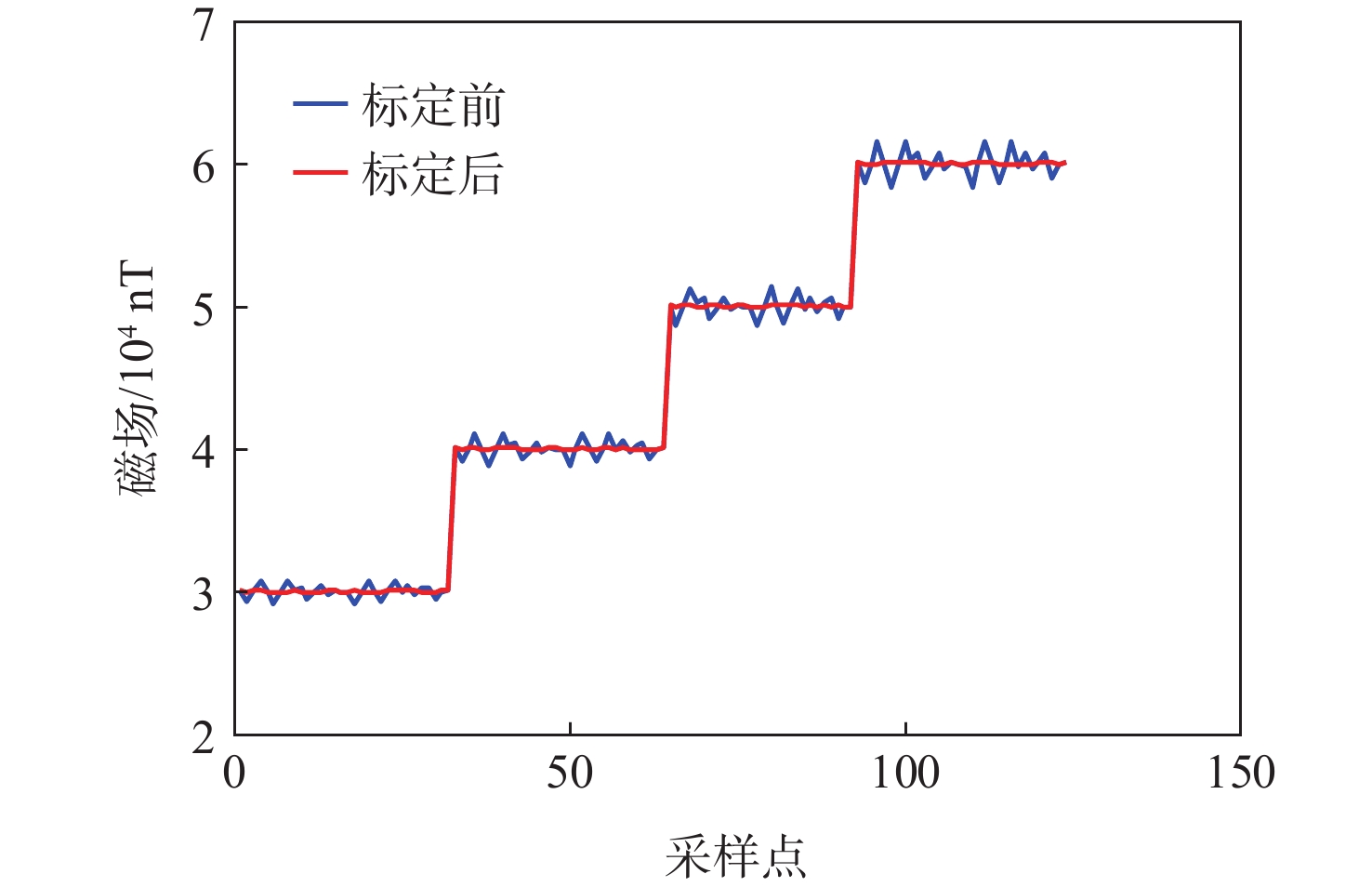
图 7 磁强计校正前后转向差对比曲线
Figure 7. Comparable curves between before calibration and after calibration in directional error
表 1 磁场定标系统性能要求与实测
Table 1. Correlation between measurement and design of magnetic field calibration system
性能指标 测试结果 大空间磁屏蔽室内部尺寸/(m×m×m) 14.24×10.26×10.06 大空间磁屏蔽室交流屏蔽系数/dB 65 大空间磁屏蔽室复现磁场范围/nT ±72 000 大均匀区磁场线圈线圈均匀区尺寸Φ/mm 2000 (球形空间)大均匀区磁场线圈Φ 2000 mm均匀区内不均匀度/%0.018 高精度无磁转台角度测量精度/(°) 0.00462  下载: 导出CSV
下载: 导出CSV
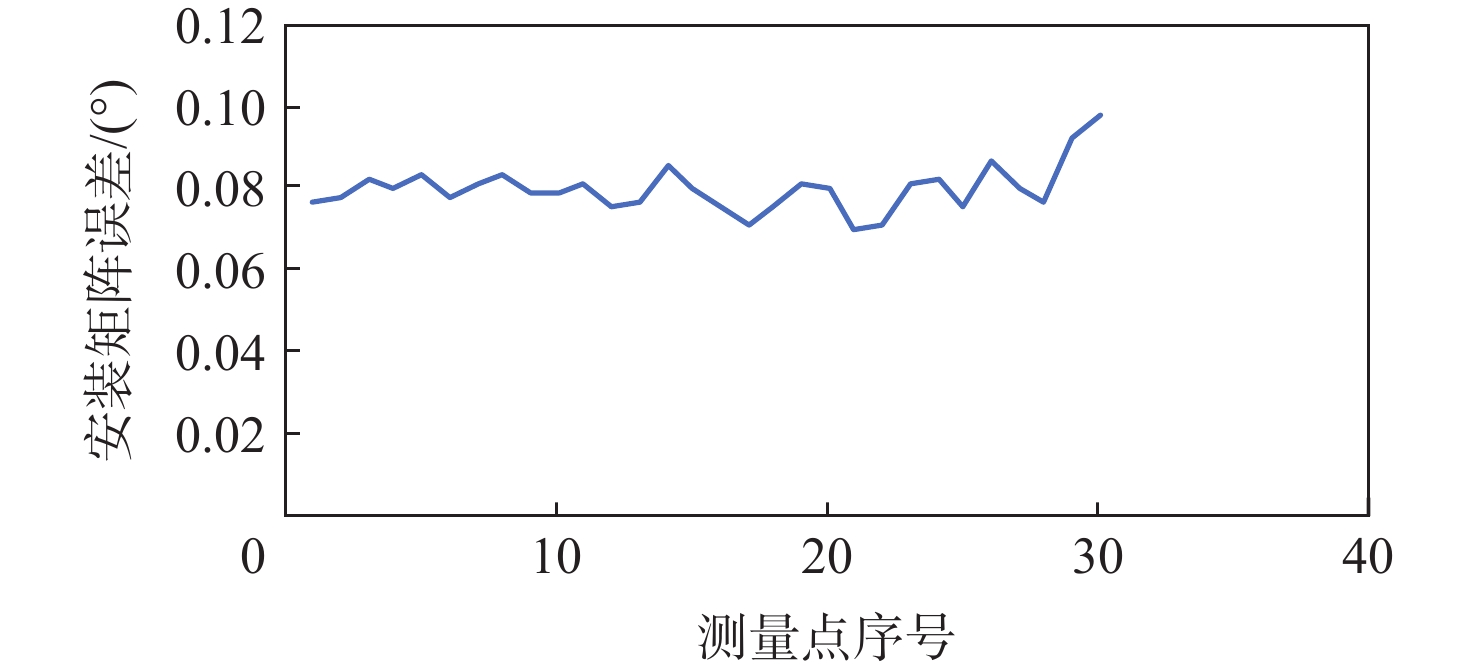
表 2 磁传感器安装矩阵均值误差
Table 2. Mean error of installation matrix about magnetic sensor
序号 误差/(°) 序号 误差/(°) 1 0.0760 17 0.0794 2 0.0780 18 0.0753 3 0.0817 19 0.0710 4 0.0800 20 0.0748 5 0.0833 21 0.0814 6 0.0774 22 0.0798 7 0.0806 23 0.0692 8 0.0833 24 0.0709 9 0.0787 25 0.0813 10 0.0784 26 0.0824 11 0.0811 27 0.0752 12 0.0751 28 0.0870 13 0.0769 29 0.0800 14 0.0857 30 0.0769 15 0.1175 31 0.0922 16 0.1149 32 0.0978
下载: 导出CSV
表 3 安装矩阵定标误差分解
Table 3. Installation matrix calibration error decomposition
系统差ED/
(°)标准差ES/
(°)转台自身
误差ER/(°)安装矩阵定标
误差EA/(°)0.0797 0.005794 0.0046 0.0035
下载: 导出CSV
-
[1] 李磊, 王劲东, 周斌, 等. 磁通门磁强计在深空探测中的应用[J]. 深空探测学报, 2017, 4(6): 529-534.LI L, WANG J D, ZHOU B, et al. Application of fluxgate magnetometer in deep space exploration[J]. Journal of Deep Space Exploration, 2017, 4(6): 529-534(in Chinese). [2] 周斌, 王劲东, 赵华, 等. 萤火一号火星探测器磁通门磁强计高精度标定技术[J]. 上海航天, 2013, 30(4): 179-182.ZHOU B, WANG J D, ZHAO H, et al. Precision calibration technology of fluxgate magnetometer for YH-1 Mars probe[J]. Aerospace Shanghai, 2013, 30(4): 179-182(in Chinese). [3] 周斌, 程炳钧. 电磁监测试验卫星(张衡一号)高精度磁强计研制与标定[J]. 遥感学报, 2018, 22(S1): 64-73. doi: 10.11834/jrs.20187242ZHOU B, CHENG B J. Development and calibration of high-precision magnetometer for electromagnetic monitoring test satellite (Zhangheng No. 1)[J]. National Remote Sensing Bulletin, 2018, 22(S1): 64-73(in Chinese). doi: 10.11834/jrs.20187242 [4] BALOGH A. Planetary magnetic field measurements: missions and Instrumentation[J]. Space Science Reviews, 2010, 152(1): 23-97. [5] 何佳敏, 齐红丽, 雷华明, 等. 融合转向差校正的磁强计地磁补偿硬件实现研究[J]. 仪表技术与传感器, 2021(9): 23-28.HE J M, QI H L, LEI H M, et al. Study on hardware realization of magnetometer geomagnetic compensation with fusion steering error correction[J]. Instrument Technique and Sensor, 2021(9): 23-28(in Chinese). [6] 高翔, 严胜刚, 李斌. 基于最小二乘的磁通门梯度仪转向差校正方法[J]. 西北工业大学学报, 2016, 34(5): 837-842.GAO X, YAN S G, LI B. Error calibration method for magnetic gradiometer base on least square[J]. Journal of Northwestern Polytechnical University, 2016, 34(5): 837-842(in Chinese). [7] 孙闯, 王凯强, 任顺清. 星敏与磁强计安装矩阵的户外标定[J]. 导航定位与授时, 2016, 3(2): 77-82.SUN C, WANG K Q, REN S Q. Calibration of installing matrix between magnetometer and star sensor[J]. Navigation Positioning and Timing, 2016, 3(2): 77-82(in Chinese). [8] 王凯强. 星敏感器与磁强计安装矩阵的测试监测方法及其误差分析[D]. 哈尔滨: 哈尔滨工业大学, 2016.WANG K Q. Test and monitoring method and error analysis of star sensor and magnetometer installation matrix[D]. Harbin: Harbin Institute of Technology, 2016(in Chinese). [9] 刘逸康, 任顺清, 张高雄, 等. 星敏与磁力仪间安装矩阵的一种地面标定方法[J]. 哈尔滨工业大学学报, 2021, 53(6): 34-40.LIU Y K, REN S Q, ZHANG G X, et al. A calibration method for installation matrix between star sensor and magnetometer on the ground[J]. Journal of Harbin Institute of Technology, 2021, 53(6): 34-40(in Chinese). [10] CONNERNEY J E P, BENN M, BJARNO J B, et al. The Juno magnetic field investigation[J]. Space Science Reviews, 2017, 213(1): 39-138. [11] 焦秉刚, 顾伟, 张松勇. 三分量磁通门传感器非正交性误差校正[J]. 现代电子技术, 2011, 34(13): 123-126.JIAO B G, GU W, ZHANG S Y. Error calibration of three-component fluxgate sensor’s nonorthogonality[J]. Modern Electronics Technique, 2011, 34(13): 123-126(in Chinese). [12] 王鹏飞, 曾立, 唐文庆, 等. 三轴磁传感器正交性校正的矢量校准方法[J]. 空间科学学报, 2018, 38(6): 953-959. doi: 10.11728/cjss2018.06.953WANG P F, ZENG L, TANG W Q, et al. Vector calibration method for orthogonality correction of three-axis magnetometers[J]. Chinese Journal of Space Science, 2018, 38(6): 953-959(in Chinese). doi: 10.11728/cjss2018.06.953 [13] 罗静博, 陈浩, 赵苗, 等. 基于改进型入侵野草算法的三轴磁传感器非正交误差校正[J]. 兵工学报, 2019, 40(12): 2513-2518.LUO J B, CHEN H, ZHAO M, et al. Non-orthogonal error correction of three-axis magnetic sensor based on improved IWO algorithm[J]. Acta Armamentarii, 2019, 40(12): 2513-2518(in Chinese). [14] SHIMIZU H, TAKAHASHI F, HORII N, et al. Ground calibration of the high-sensitivity SELENE lunar magnetometer LMAG[J]. Earth, Planets and Space, 2008, 60(4): 353-363. doi: 10.1186/BF03352800 [15] DAVID H, HANS A, JURGEN B, et al. The MASCOT magnetometer[J]. Space Science Reviews, 2017, 208: 433-449. doi: 10.1007/s11214-016-0236-5 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 211
- HTML全文浏览量: 80
- PDF下载量: 16
- 被引次数: 0
