



Attitude compound control technology for micro/nanosatellite variable orbit maneuvering segment
-
摘要:
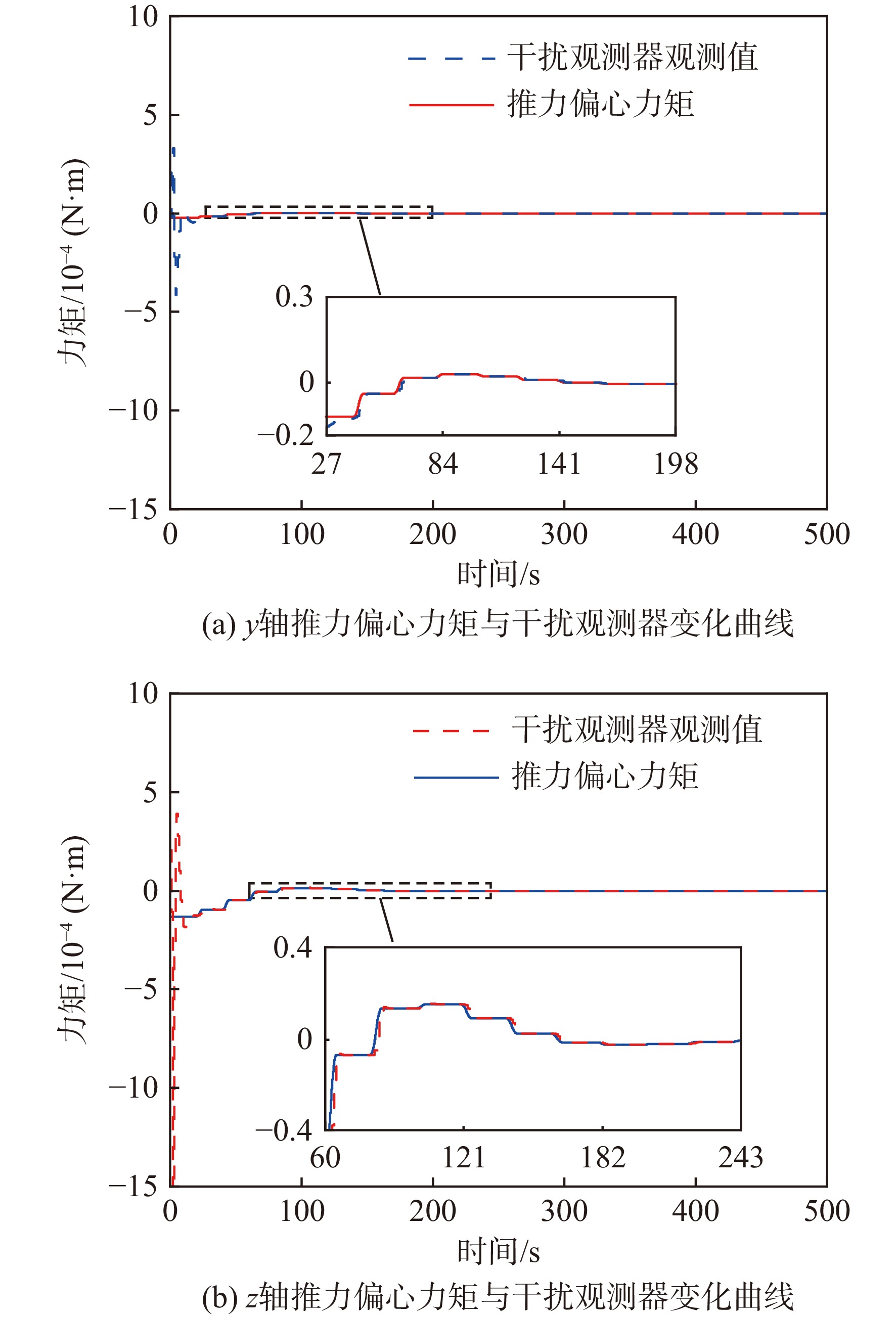
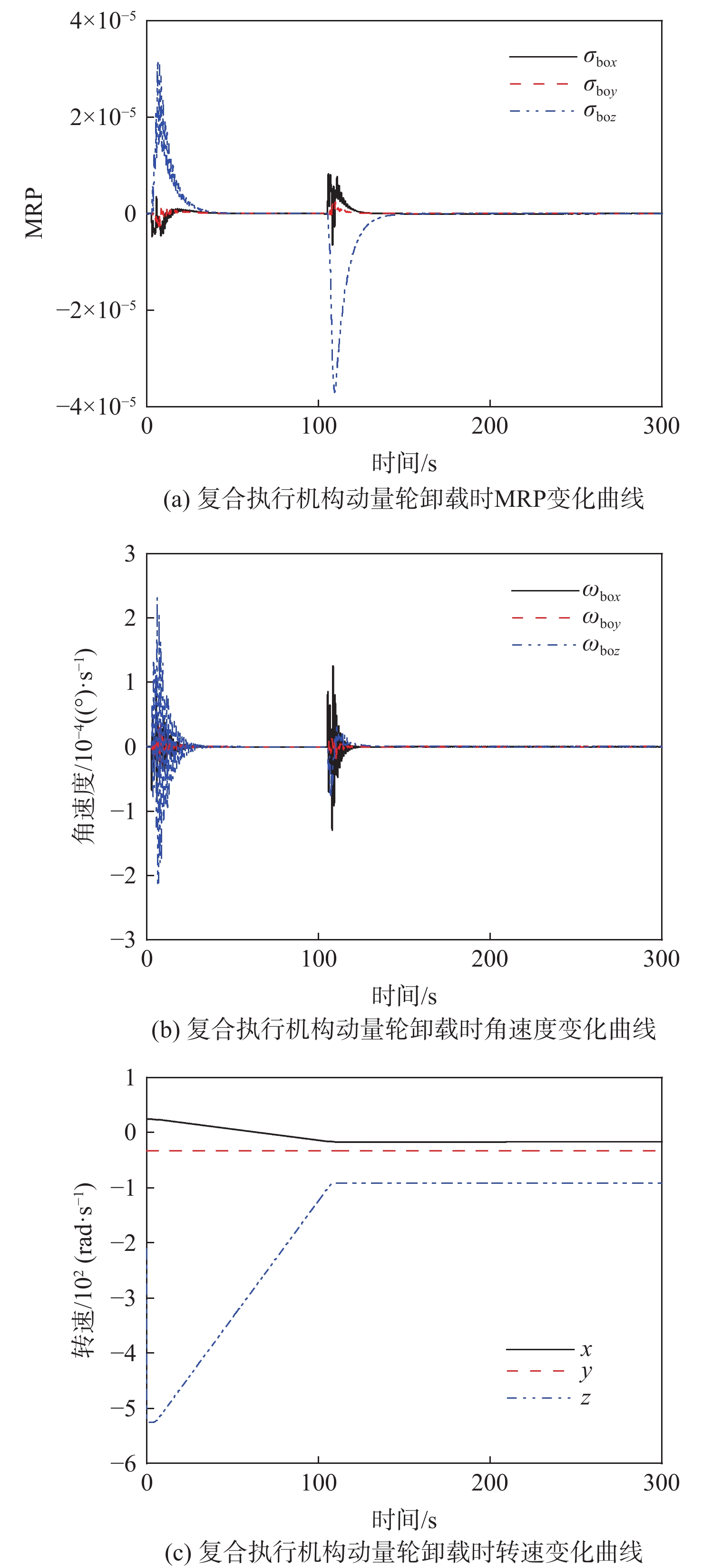
针对仅安装单推力器的微纳卫星变轨机动期间无法解决长期推力偏心扰动控制的问题,提出一种质心配平+零动量控制的复合姿态控制方法。基于零动量轮系和二维平动伺服装置构建一种新型复合执行机构,建立并优化了考虑惯性主轴偏移与附加扰动力矩的姿态转动动力学和滑块平动动力学模型;设计了指数收敛干扰观测器实时观测推力偏心力矩;设计了姿态控制环模型预测控制 (MPC)控制器和推力偏心力矩补偿环离散比例积分微分(PID)控制器,构成双闭环复合姿态控制系统。数值仿真结果表明:在微纳卫星执行长周期变轨机动任务期间,干扰观测器能有效观测慢时变的推力偏心力矩,双闭环姿态控制器可有效收敛姿态角误差至±0.01°并确保动量轮系无饱和,验证了所提方法的可行性。
Abstract:A compound attitude control system combining zero-momentum control and moving mass technology is offered to address the problem of reducing long-term thrust eccentricity disturbances during orbital maneuvers for micro/nanosatellites using a single thruster. A novel composite actuator is constructed based on the zero-momentum wheel system and a two-dimensional translational servo mechanism. Models of slider translational dynamics and attitude rotation dynamics are developed and refined, taking into consideration additional disturbance torques and the offset of the inertia axis. A dual-loop compound attitude control system comprises an model predictive control (MPC) controller for attitude control and a discrete proportional-integral-derivative (PID) controller for compensating thrust eccentricity moment. According to numerical simulation results, the dual-loop attitude controller converges attitude angle errors to within ±0.01° while maintaining non-saturation of the Reaction wheel, and the disturbance observer successfully monitors slow-time-varying thrust eccentricity moments during extended orbital maneuver missions of micro/nanosatellites. These results validate the viability of the compound attitude control approach.
-
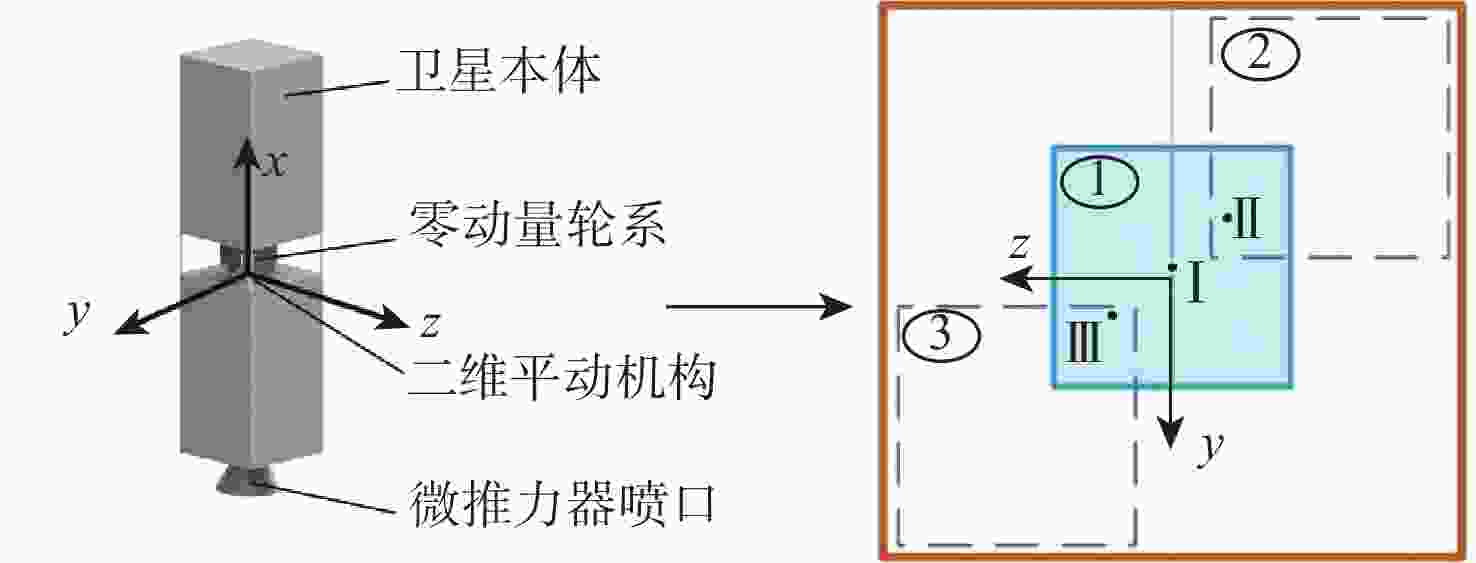
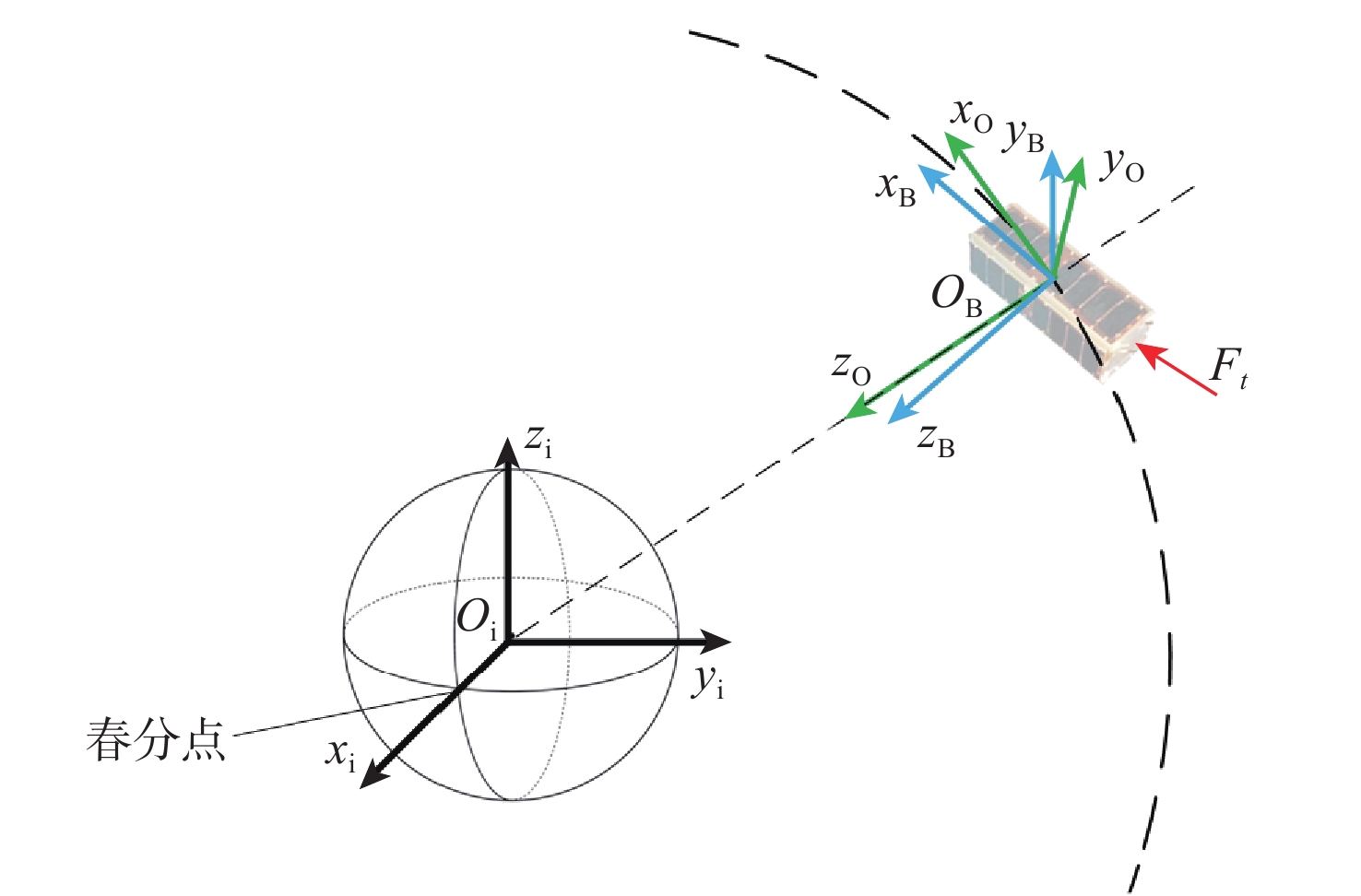
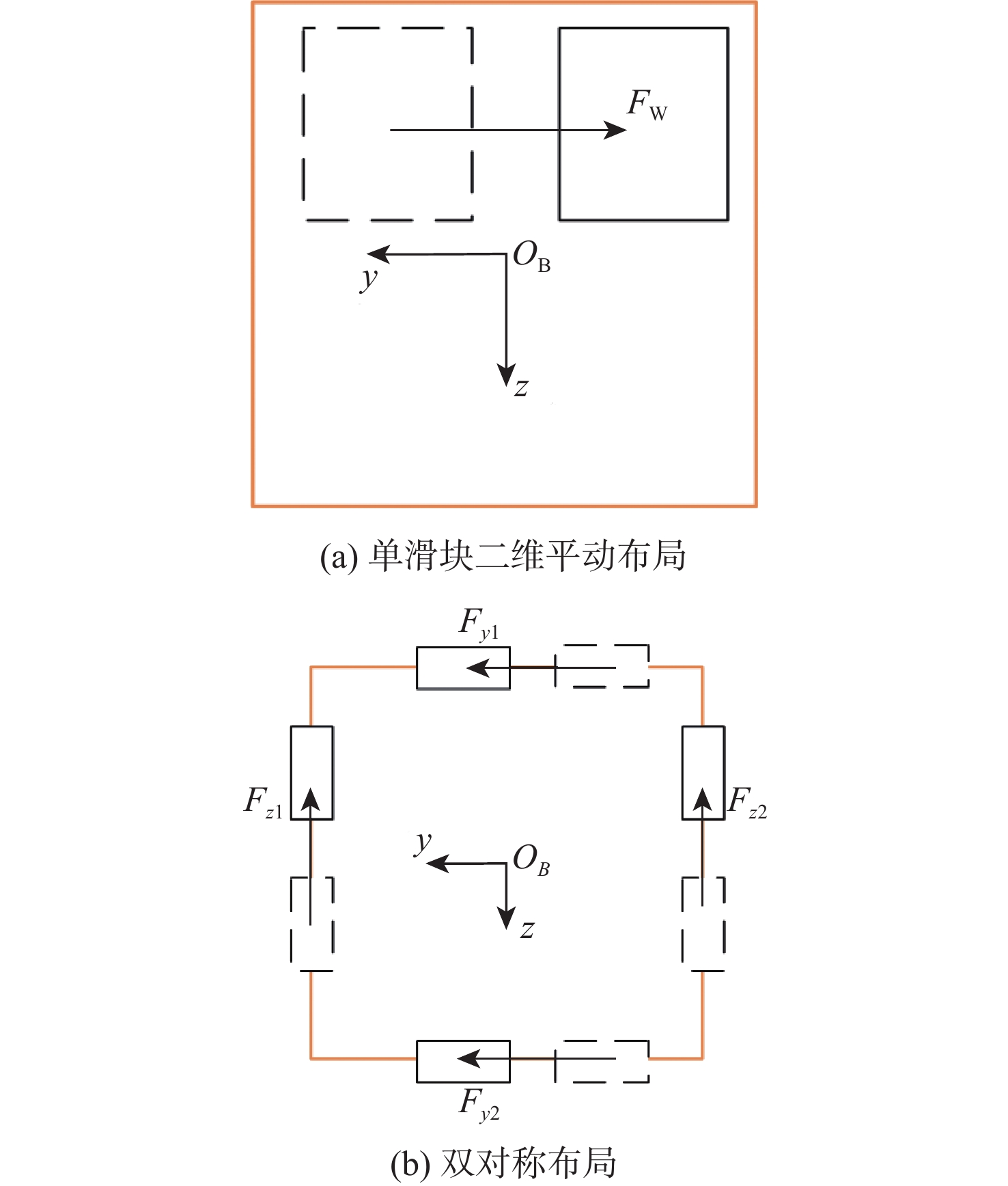
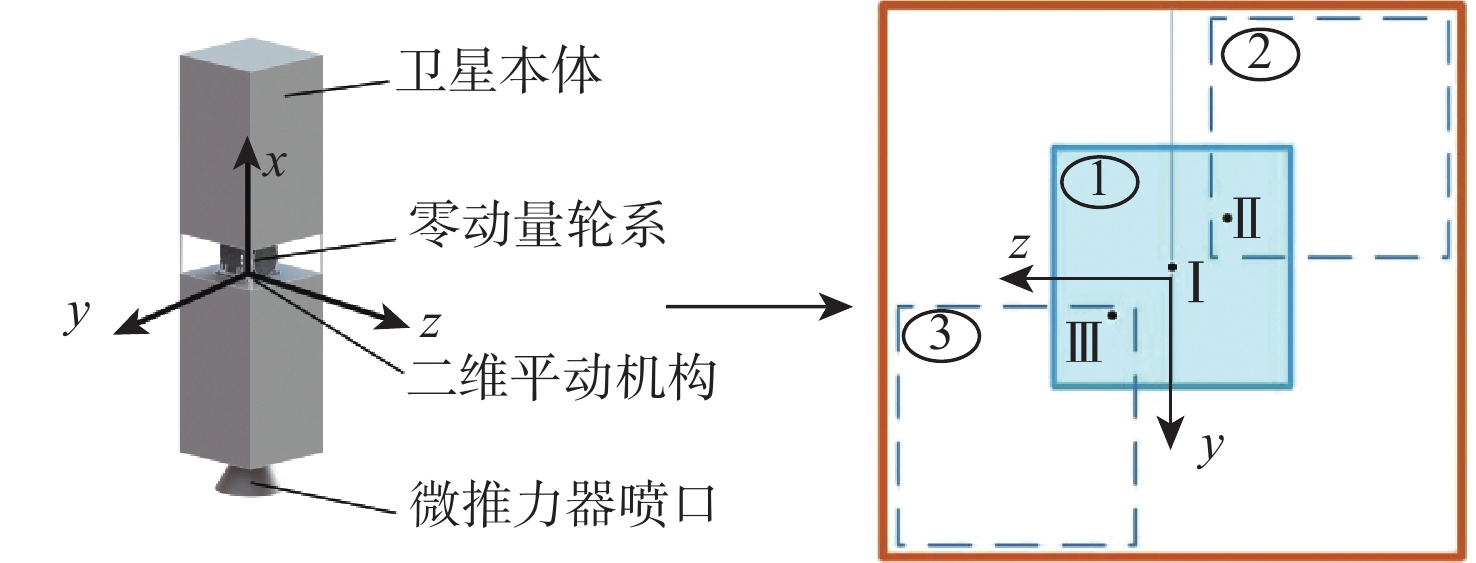
图 1 复合执行机构工作原理示意图
Figure 1. Schematic diagram of operating principle of composite actuator
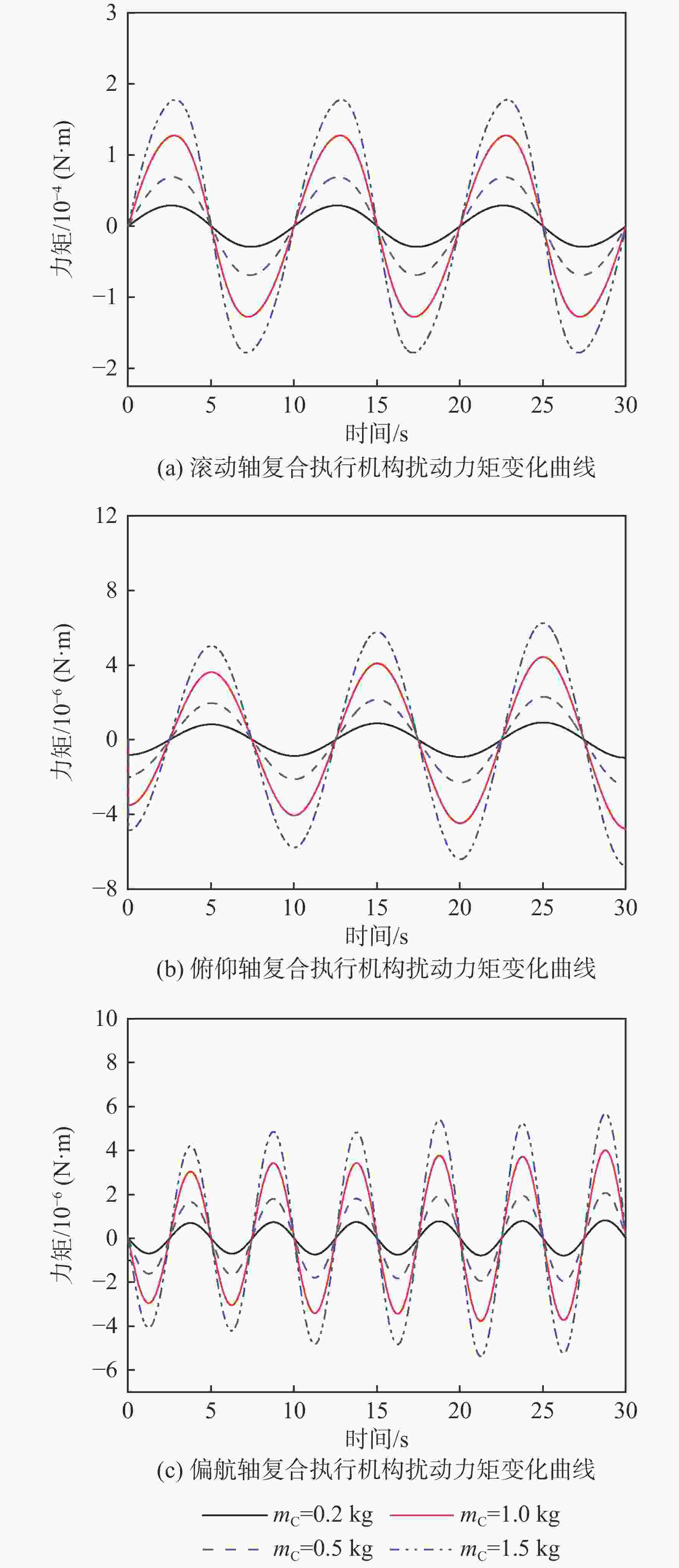
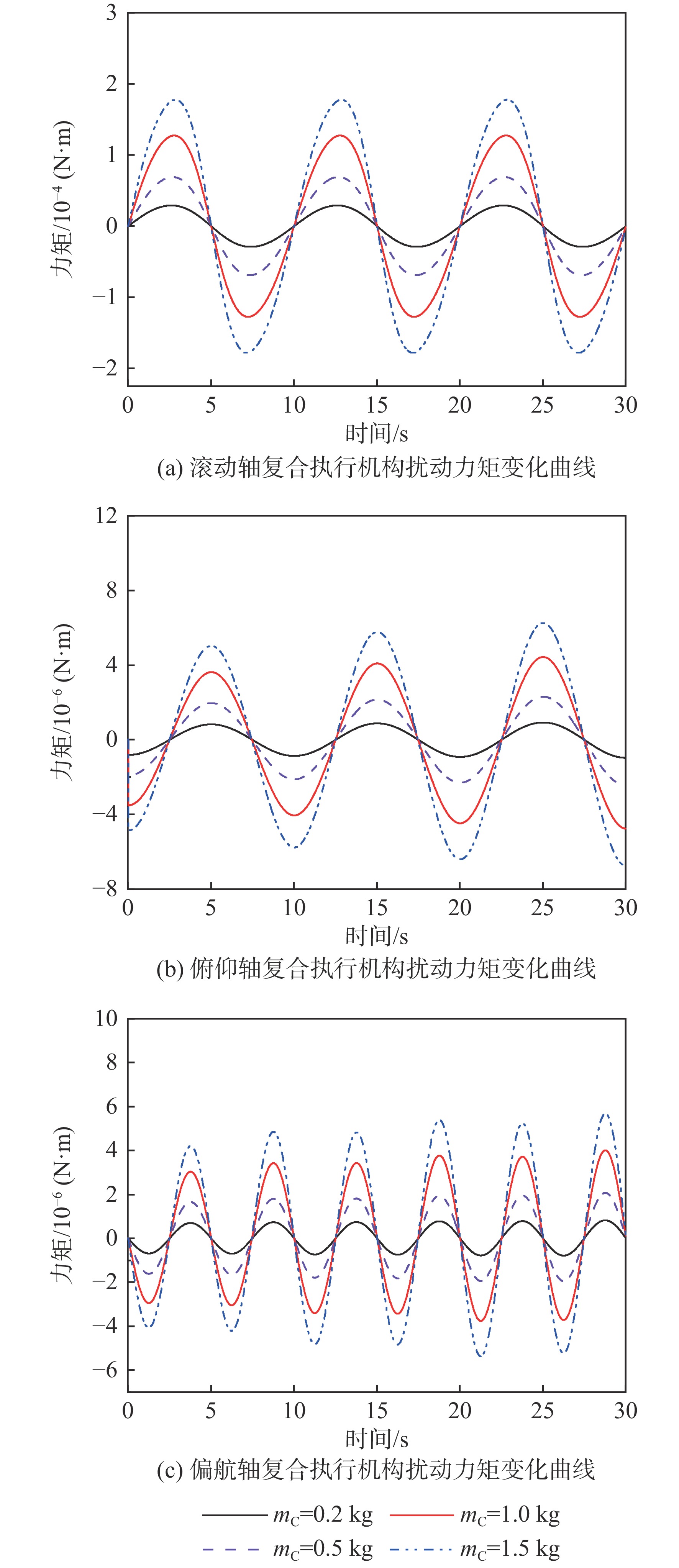
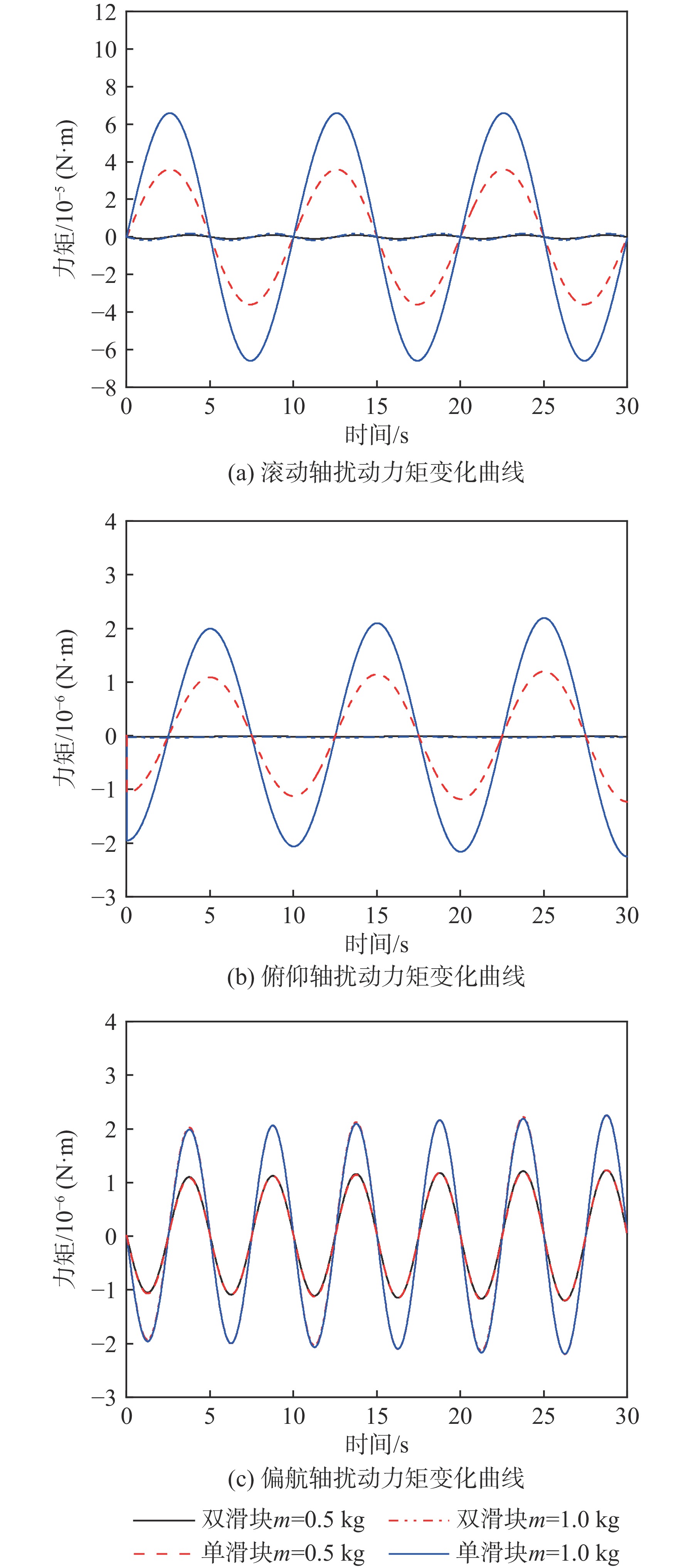
图 3 扰动力矩随复合执行机构质量变化曲线
Figure 3. Variation curves of disturbance torque with mass of composite actuator
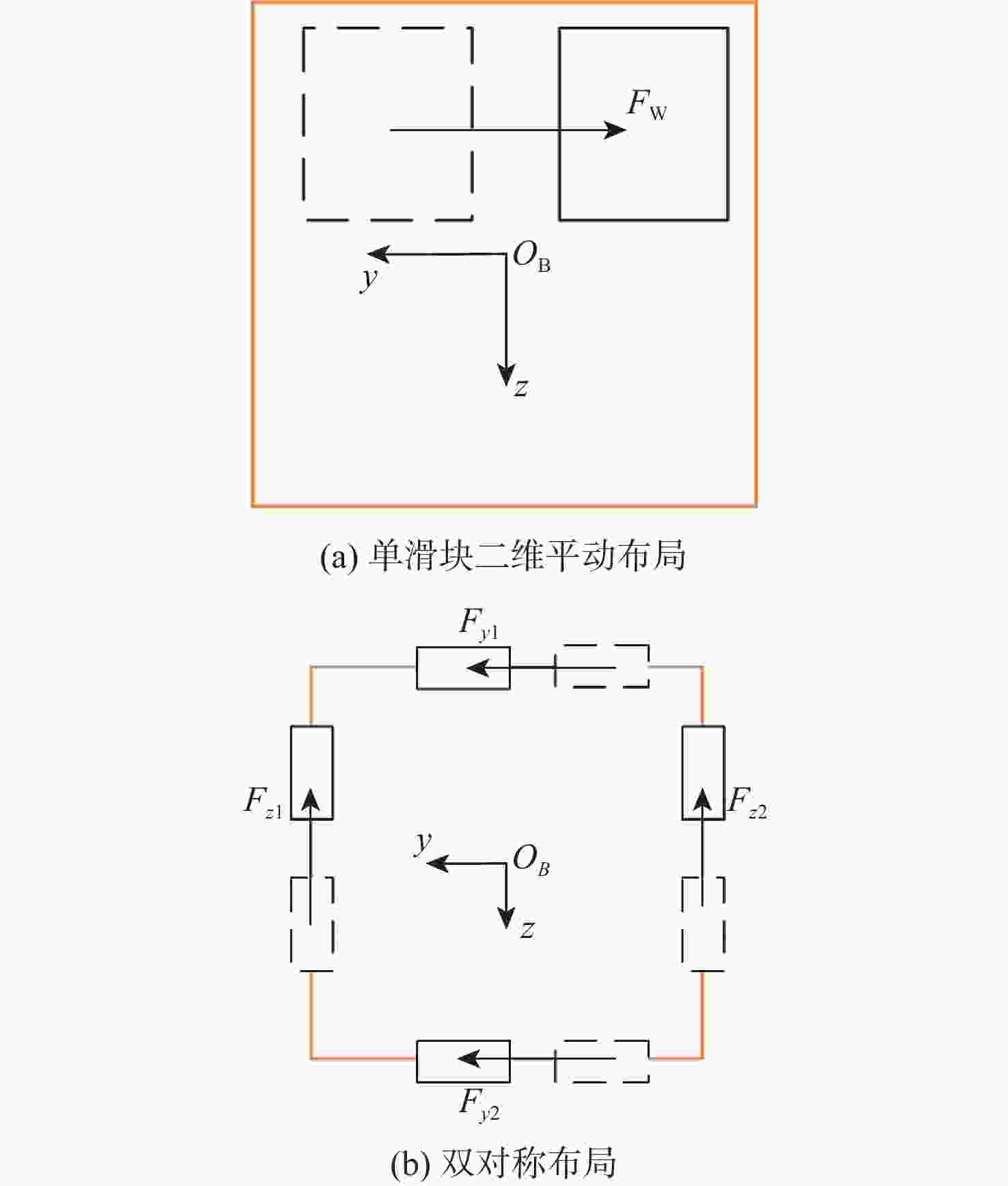
图 4 质量矩滑块运动受力示意图
Figure 4. Schematic diagram of forces on motion of a moving mass slider
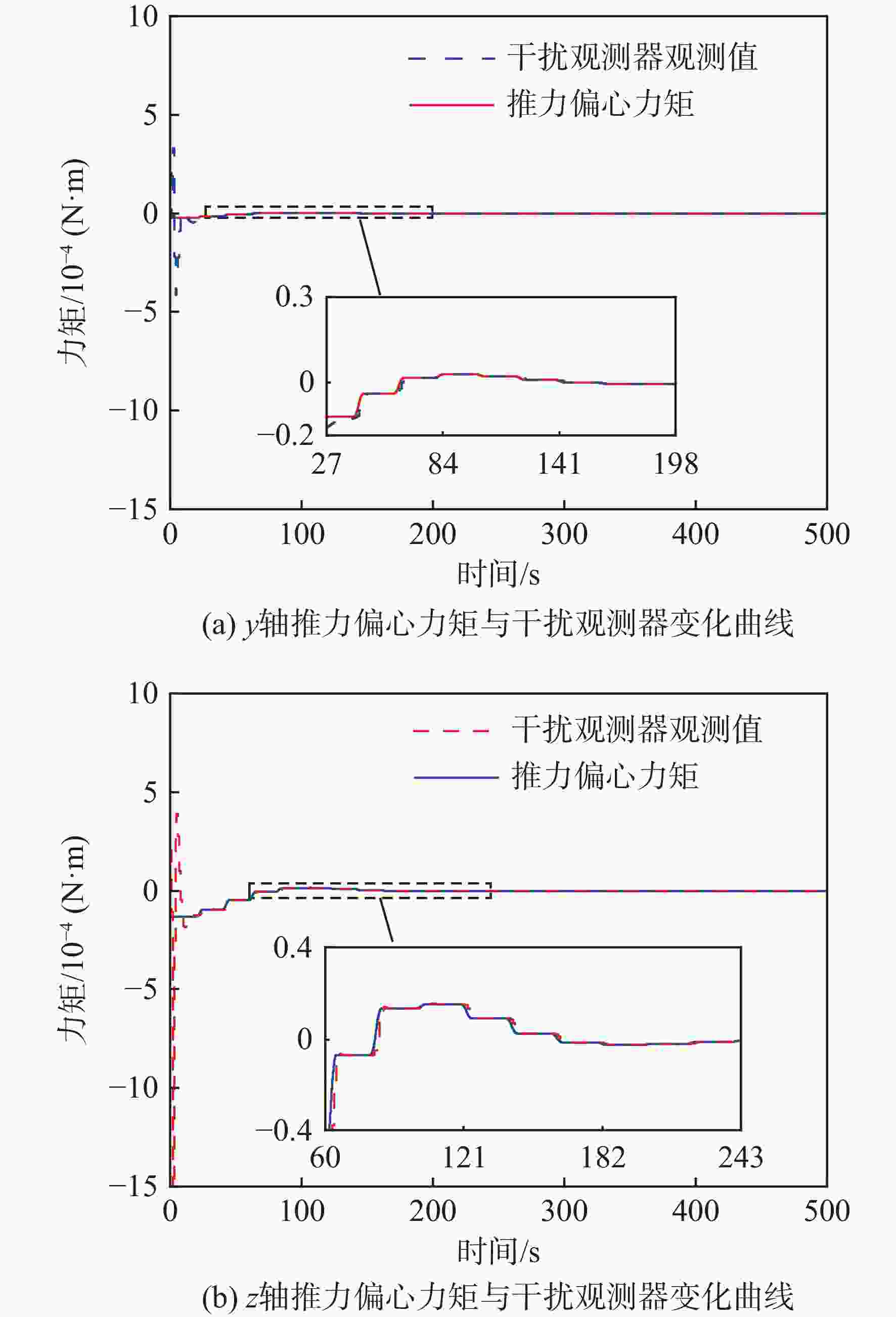
图 8 推力偏心力矩与干扰观测器变化曲线
Figure 8. Curves of thrust eccentricity moment versus interference observer variation
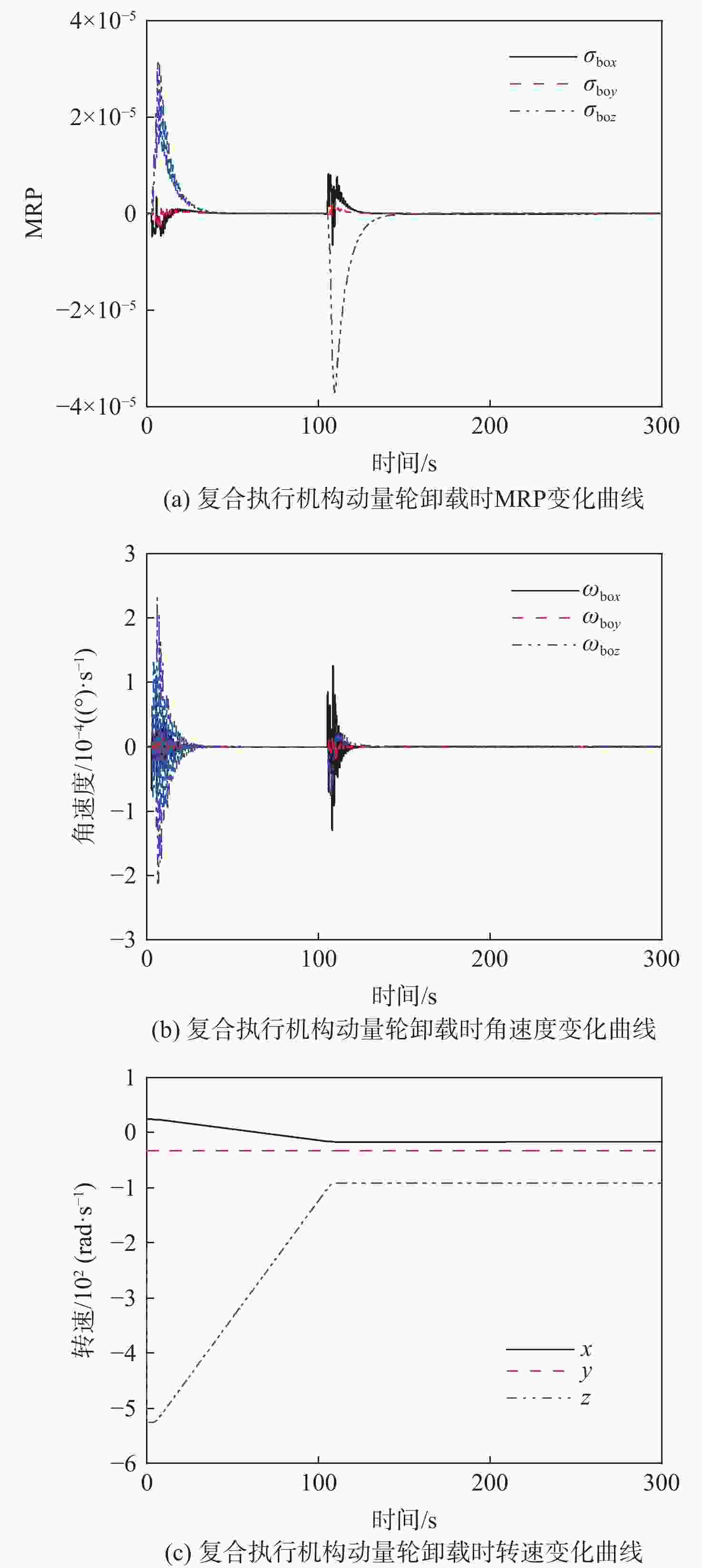
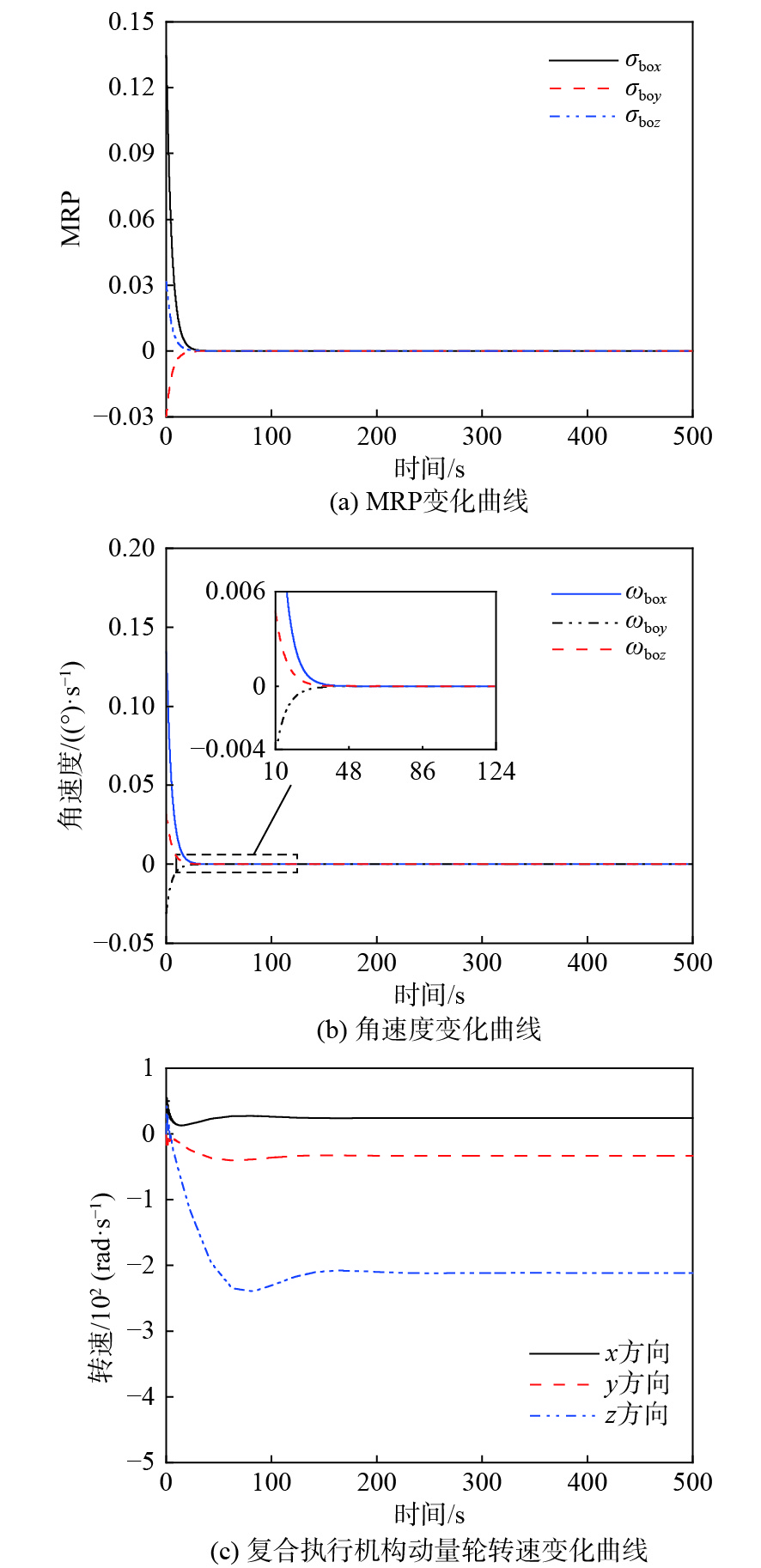
图 11 动量轮卸载时姿态参数变化
Figure 11. Curves of attitude parameters when reaction wheel of composite actuator unloading
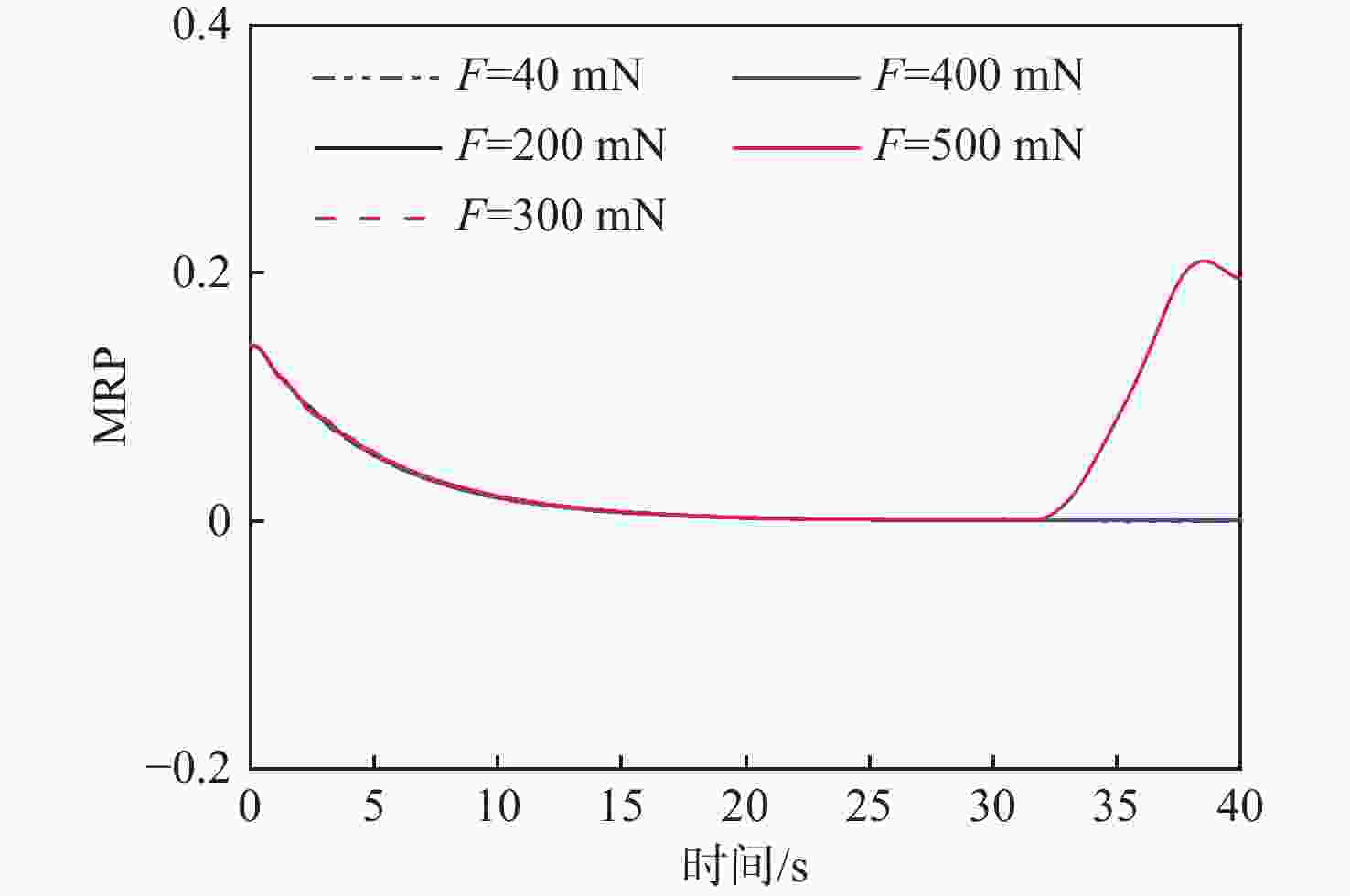
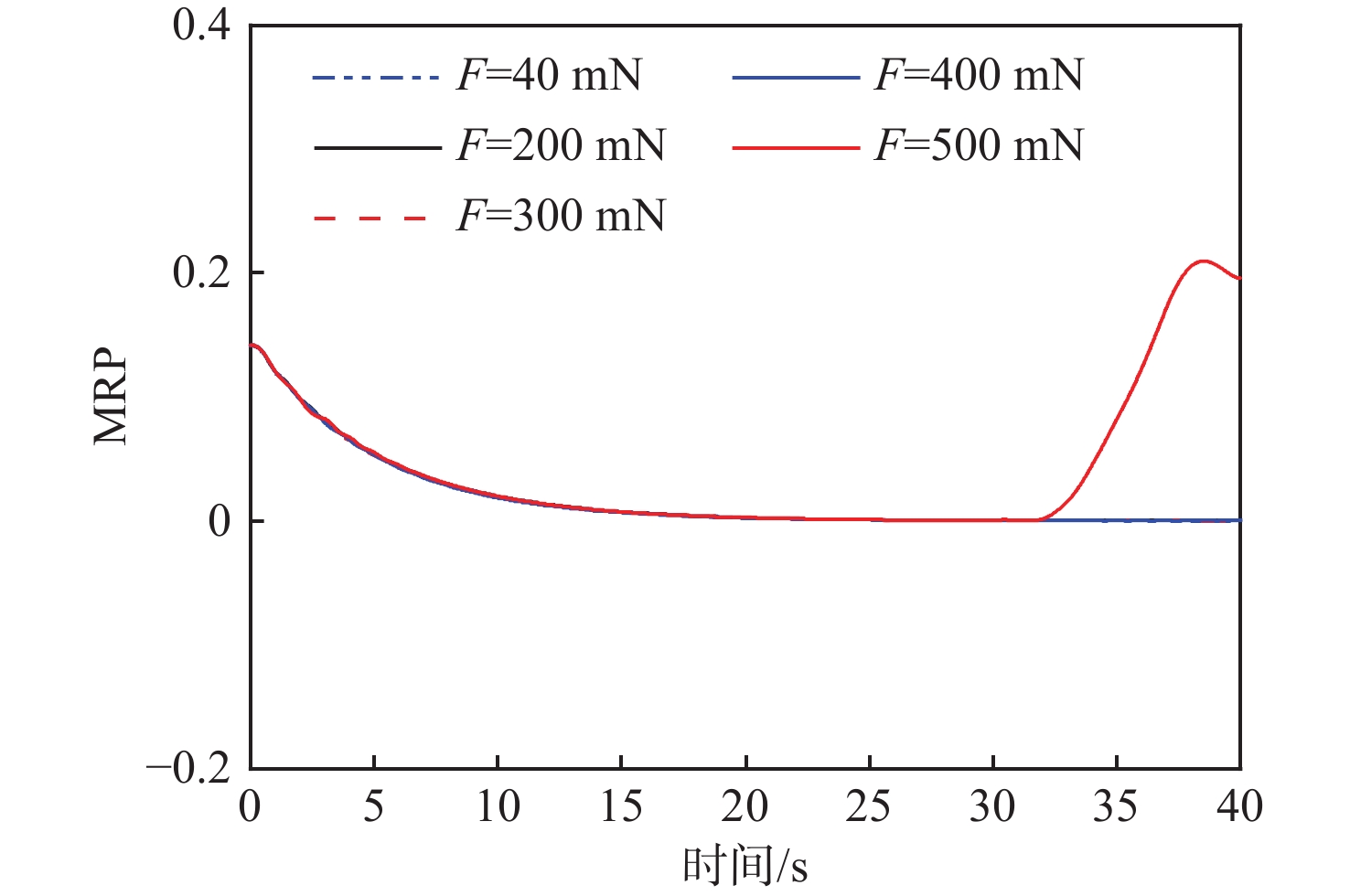
图 12 不同推力作用下MRP模值变化曲线
Figure 12. Curves of MRP modulus variation under different thrust forces
表 1 仿真参数初始设置
Table 1. Initial setup of simulation parameters
参数 数值 卫星壳体质量/kg
复合执行机构可移动质量/kg
初始质心位置/mm5
0.5
[−1.714 0.001 −0.001]卫星转动惯量/$({\text{kg}} \cdot {{\text{m}}^{\text{2}}})$ $\left[ {\begin{array}{*{20}{c}} {8665.4}&{ - 47.14}&{86.53} \\ { - 47.14}&{23785.89}&{ - 125} \\ {86.53}&{ - 125}&{23785.89} \end{array}} \right] \times {10^{ - 6}} $ 推力器推力大小/${\text{mN}}$
推力指向误差/(°)
推力器安装偏差参数/${\text{mm}}$40
[−5 5 −5]
[0 2 −2]初始姿态欧拉角(312) /(°)
初始角速度/$((^\circ) \cdot {\text{s}}^{-1})$[30 −10 10]T
[0.5 0.5 0.5]T动量轮最大转速/(rad·min−1)
动量轮最大输出力矩/N·m6.28
0.002复合执行机构最大位移/mm
复合执行机构最大加速度/(m·s−2)20
0.1干扰观测器参数K
推力补偿控制环参数${k_{\text{p}}},{k_{\text{d}}},{k_{\text{i}}} $
姿态控制环参数${N_{\text{p}}} $1
0.09, 0.09, 0.1
10 下载: 导出CSV
下载: 导出CSV
-
[1] 廖文和. 立方体卫星技术发展及其应用[J]. 南京航空航天大学学报, 2015, 47(6): 792-797.LIAO W H. A survey of cubesat technology development and applications[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2015, 47(6): 792-797(in Chinese). [2] 赵炜渝, 白保存, 金仲和. 皮纳卫星应用与特点分析[J]. 国际太空, 2013(8): 36-40.ZHAO W Y, BAI B C, JIN Z H. Application and characteristics analysis of pina satellite[J]. Space International, 2013(8): 36-40(in Chinese). [3] 林来兴. 小卫星技术的发展和应用前景[J]. 中国航天, 2006(11): 43-47.LIN L X. Development and application prospect of small satellite technology[J]. Aerospace China, 2006(11): 43-47(in Chinese). [4] LI J Q, GAO C S, LI C Y, et al. A survey on moving mass control technology[J]. Aerospace Science and Technology, 2018, 82: 594-606. [5] 高长生, 荆武兴, 于本水, 等. 质量矩导弹构型及自适应控制律设计[J]. 航空学报, 2010, 31(8): 1593-1599.GAO C S, JING W X, YU B S, et al. Configuration and adaptive control law design for a mass moment missile[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(8): 1593-1599(in Chinese). [6] REGAN F J, KAVETSKY R A. Add-on controller for ballistic reentry vehicles[J]. IEEE Transactions on Automatic Control, 1984, 12(6): 869-880. [7] VADDI S, MENON P, SWERIDUK G, et al. Multiple stepping solution to linear two point boundary value problems in missile integrated control[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2005. [8] 易彦, 周凤岐. 高超声速战术导弹的变质心矢量控制[J]. 中国科学G辑, 2003, 33(3): 281-288.YI Y, ZHOU F Q. Variable centroid vector control of hypersonic tactical missile[J]. Science in China (Series G), 2003, 33(3): 281-288(in Chinese). [9] CHILDS D W. A movable-mass attitude-stabilization system for artificial-g space stations[J]. Journal of Spacecraft and Rockets, 1971, 8(8): 829-834. doi: 10.2514/3.30328 [10] WIE B. Solar sail attitude control and dynamics, part two[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(4): 536-544. doi: 10.2514/1.11133 [11] CHESI S. Attitude control of nanosatellites using shifting masses[M]. San Francisco : University of California, Santa Cruz, 2015. [12] EL-GOHARY A. On the control of programmed motion of a rigid body containing moving masses[J]. International Journal of Non-Linear Mechanics, 2000, 35(1): 27-35. doi: 10.1016/S0020-7462(98)00084-5 [13] EL-GOHARY A. Global stability of the rotational motion of a rigid body containing moving masses[J]. International Journal of Non-Linear Mechanics, 2001, 36(4): 663-669. doi: 10.1016/S0020-7462(00)00030-5 [14] EL-GOHARY A I, TAWFIK T S. Optimal control of the rotational motion of a rigid body using moving masses[J]. Applied Mathematics and Computation, 2004, 153(2): 453-465. doi: 10.1016/S0096-3003(03)00645-3 [15] 陆正亮. 快速机动卫星质量矩姿态控制技术研究[D]. 南京: 南京理工大学, 2018: 53-61.LU Z L. Research on mass moment attitude control technology of fast maneuvering satellite[D]. Nanjing: Nanjing University of Science and Technology, 2018: 53-61(in Chinese). [16] 钱鹏俊, 廖文和, 陆正亮, 等. 质量矩固体推进微纳卫星自适应反演控制律设计[J]. 推进技术, 2022, 43(1): 281-289.QIAN P J, LIAO W H, LU Z L, et al. Design of adaptive backstepping control for moving mass micro-nano satellite with solid rocket motor[J]. Journal of Propulsion Technology, 2022, 43(1): 281-289(in Chinese). [17] 胡远东, 陆正亮, 廖文和. 低轨纳卫星质量矩姿态控制技术研究[J]. 力学学报, 2020, 52(6): 1599-1609.HU Y D, LU Z L, LIAO W H. Attitude control technology for mass moment nano-satellite in low earth orbit[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(6): 1599-1609(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 467
- HTML全文浏览量: 117
- PDF下载量: 7
- 被引次数: 0
