



Real-time tracking of infrared dim-small target with multi-feature adaptive fusion under double confidence
-
摘要:
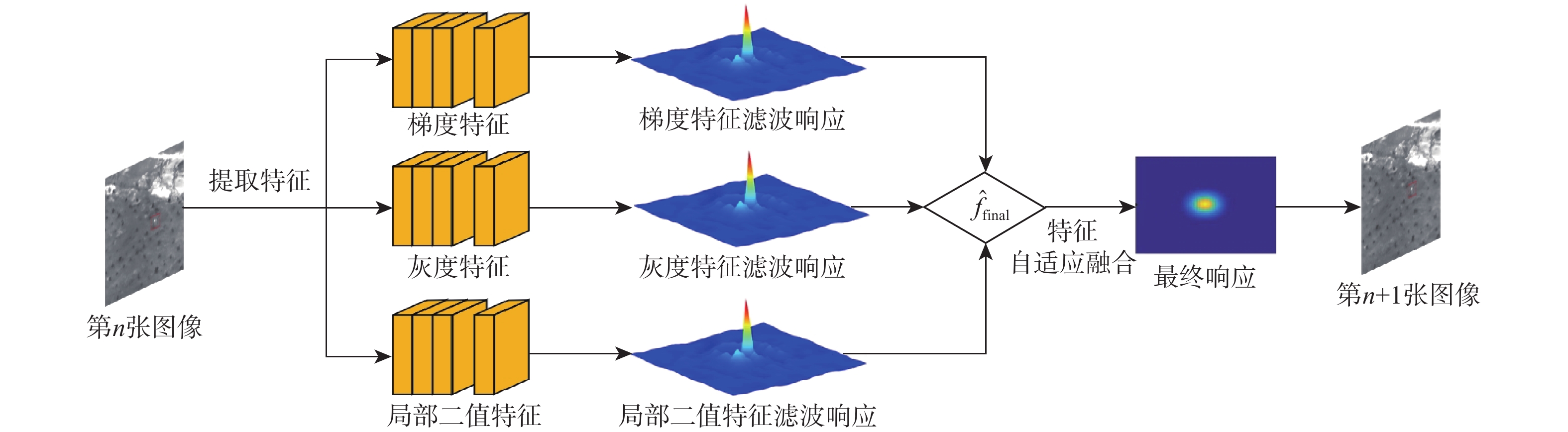
针对在红外弱小目标跟踪过程中出现的地面背景杂乱、相似目标干扰及目标微弱等一系列难题,为提高算法在复杂地面背景下跟踪的鲁棒性和实时性,利用卡尔曼滤波预测目标的初始位置,将初始位置设置为感兴趣区域(ROI)的中心。提取ROI区域中目标的灰度(GRAY)特征、梯度(HOG)特征和局部二值(LBP)特征,分别计算滤波响应图,依据3个响应结果的平均峰值相关能量(APCE)和相邻2帧的响应一致性(CFR)获得融合权重,采用自适应加权融合的方式将3个特征的响应结果进行融合,从而估计目标的最佳位置。对目标模型进行更新,并将目标位置作为卡尔曼滤波的量度。针对不同场景的红外地面背景图像序列的实验结果表明:平均距离精度(DP)为0.782,平均重叠精度(OP)为0.731,实时跟踪速度为94.7帧/s,所提算法能够有效提升复杂环境下跟踪的准确性和鲁棒性,整体性能优于对比算法。
Abstract:In order to improve the robustness and real-time performance of the algorithm, a series of problems, such as ground background clutter, similar target interference and weak targets appear in the process of infrared dim small target tracking. Kalman filter is first used to predict the initial position of the target, and the initial position is set as the center of the region of interest (ROI). Next, determine the filter response graph by extracting the target’s local binary (LBP) features, gradient (HOG) features, and grayscale (GRAY) features within the ROI region. Fusion weights are obtained according to the average peak correlation energy (APCE) of the three response results and the consistent frame response (CFR) of the adjacent frames, and the response results of the three features are fused by adaptive weighted fusion. To estimate the optimal location of the target. Finally, the target model is updated and the target position is taken as the measure of the Kalman filter. According to experimental data, the average distance precision (DP), overlap precision (OP), and real-time tracking speed for infrared ground background image sequences in various scenarios are 0.782, 0.731, and 94.7 frames per second, respectively. The algorithm can effectively improve the accuracy and robustness of tracking in complex environments.
-

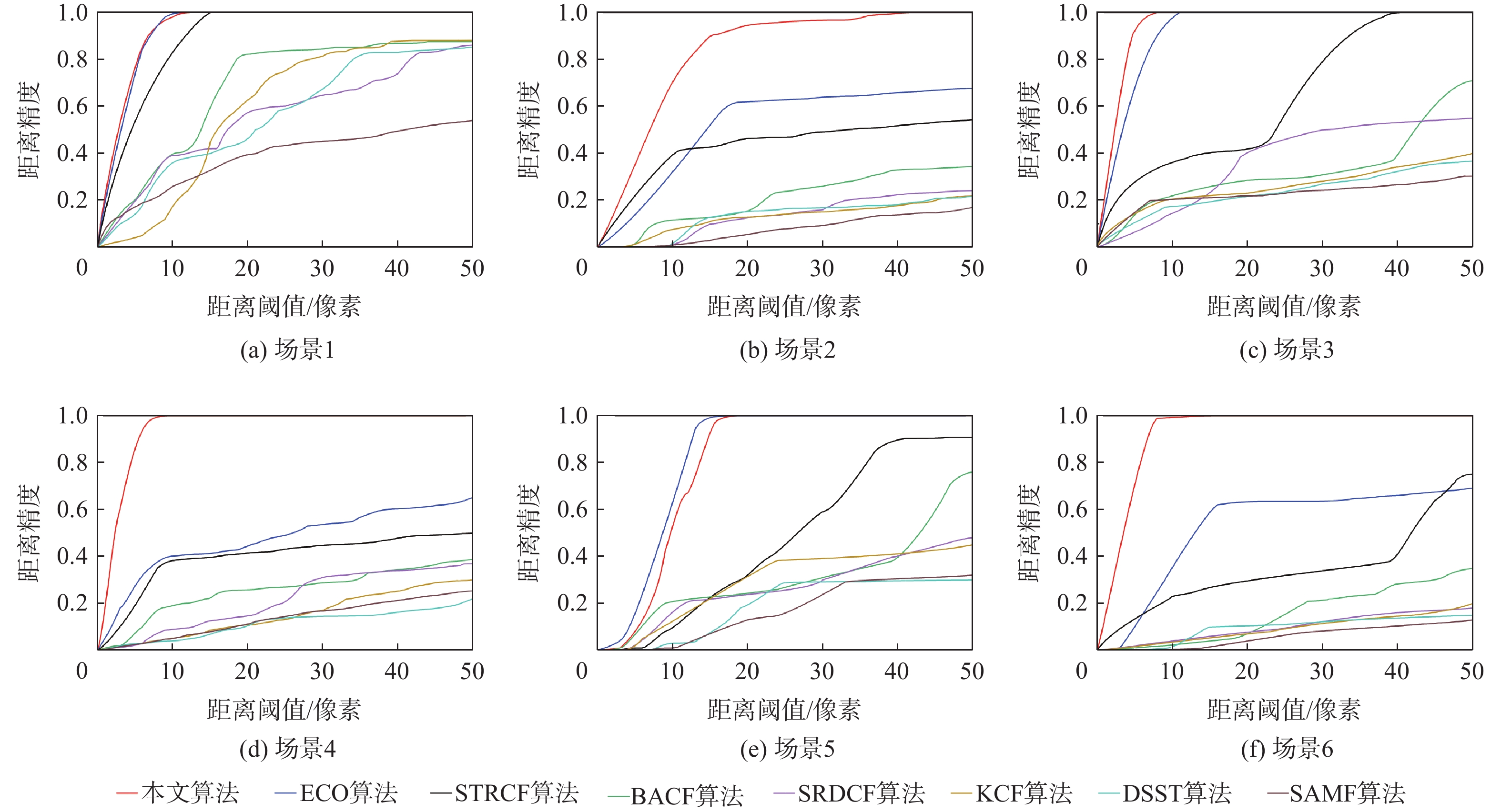
图 3 8种对比算法在不同场景下的距离精度曲线
Figure 3. Distance precision curves of 8 comparison algorithms in different scenarios

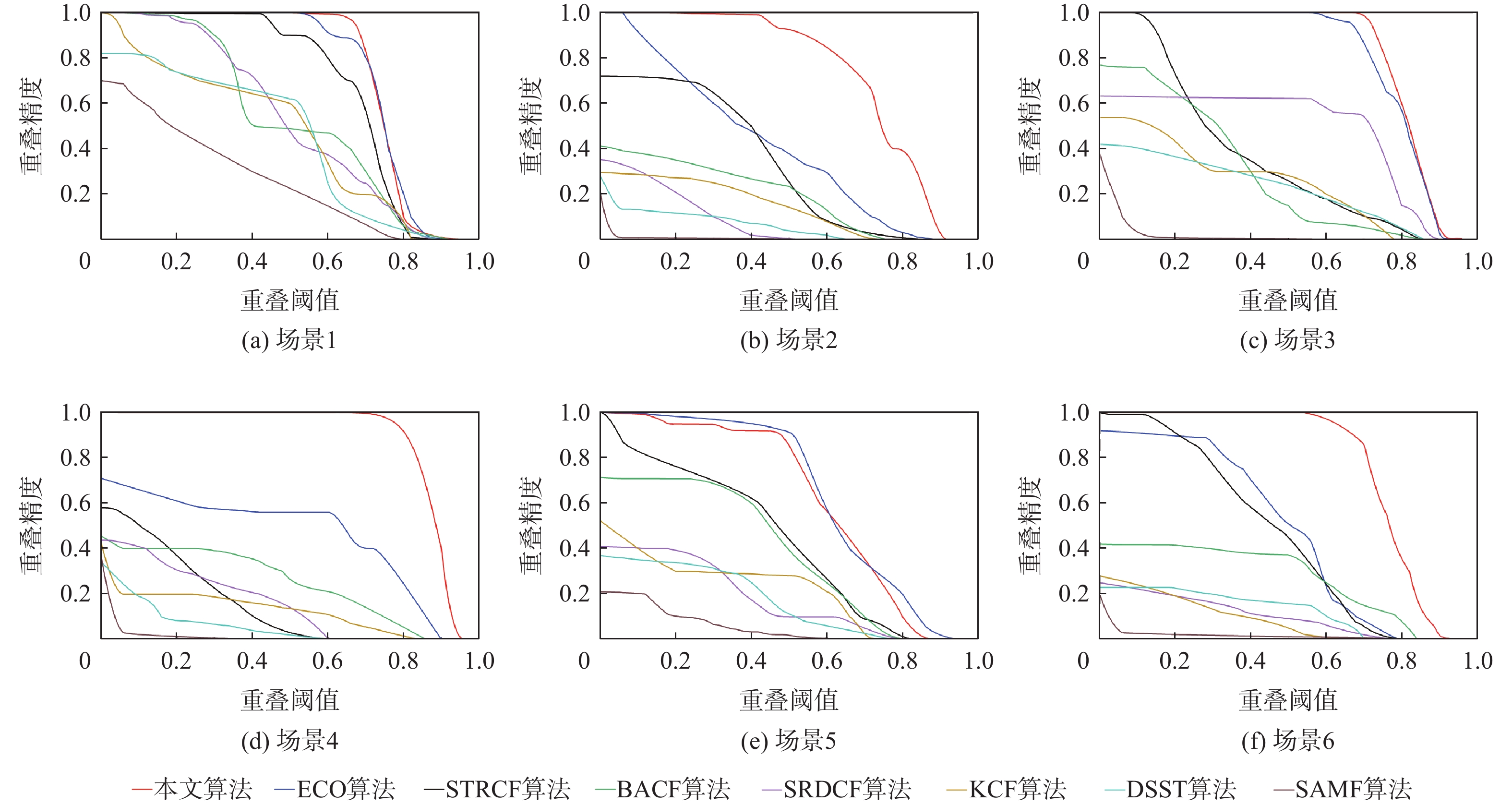
图 4 8种对比算法在不同场景下的重叠精度曲线
Figure 4. Overlap precision curves of 8 contrast algorithms in different scenarios

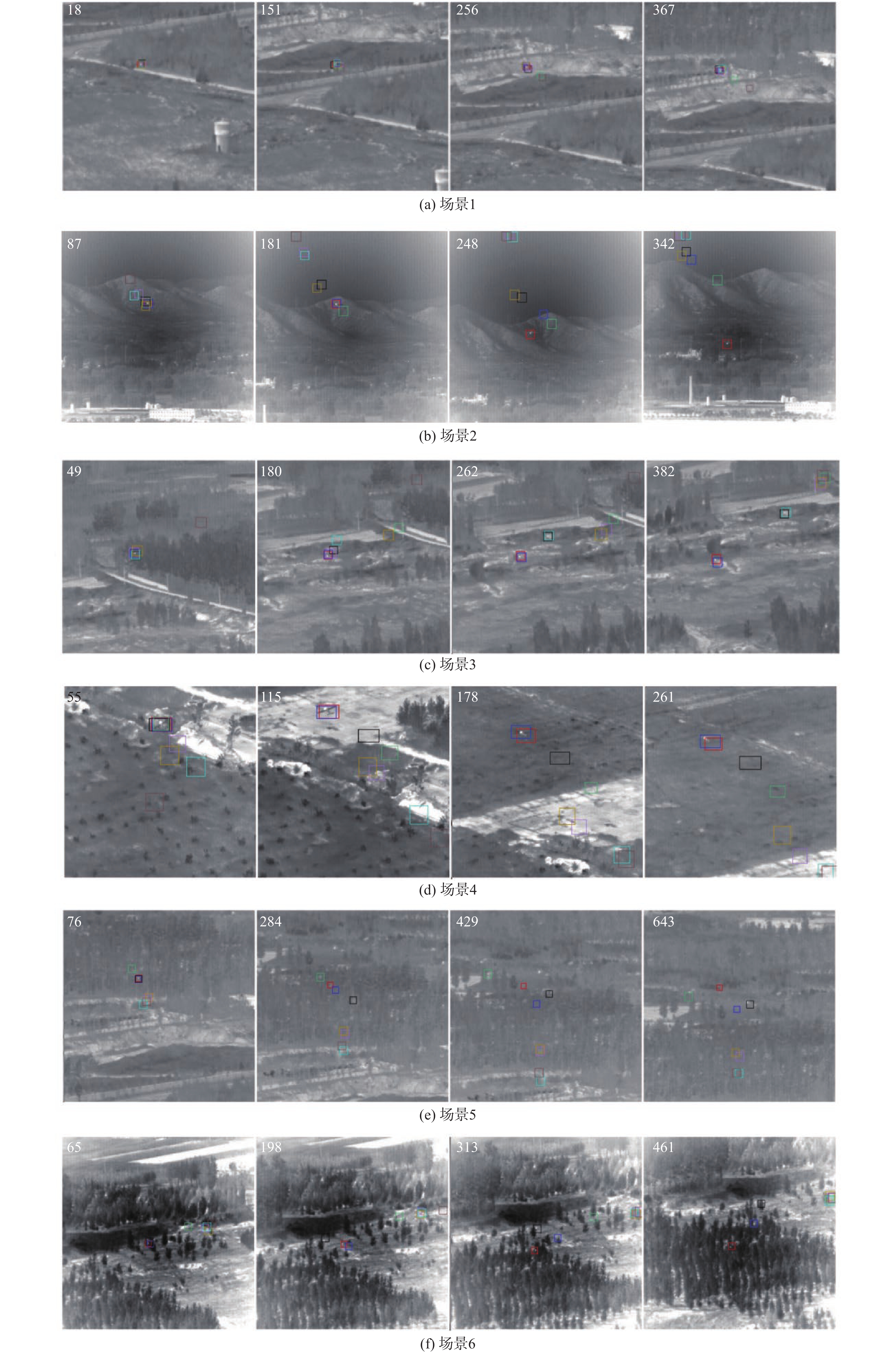
图 5 8种对比算法在不同场景的跟踪结果对比
Figure 5. Comparison of tracking results of 8 comparison algorithms in different scenarios
表 1 消融实验结果
Table 1. Ablation experimental results
组别 特征选择 多特征自适应融合模块 卡尔曼滤波预定位模块 距离精度 重叠精度 跟踪速度/(帧·s−1) 1 GRAY+HOG 0.611 0.569 135.1 2 GRAY+HOG √ 0.647 0.581 51.9 3 HOG+LBP 0.667 0.606 107.6 4 HOG+LBP √ 0.689 0.625 44.5 5 GRAY+LBP 0.683 0.639 124.2 6 GRAY+LBP √ 0.711 0.657 48.3 7 GRAY+HOG+LBP 0.702 0.654 89.7 8 GRAY+HOG+LBP √ 0.693 0.647 128.4 9 GRAY+HOG+LBP √ 0.795 0.746 32.2 10(本文) GRAY+HOG+LBP √ √ 0.782 0.731 94.7  下载: 导出CSV
下载: 导出CSV
表 2 数据集特征描述
Table 2. Data set feature description
场景图像
序列帧数 目标大小/
(像素×像素)目标平均速度/
(像素·s−1)场景描述 场景1 399 3×3 0.47 地面背景干扰较小 场景2 399 4×4 0.38 地面背景干扰较小,
目标做不规则俯仰运动场景3 399 5×5 0.40 地面背景干扰较小,
相似目标干扰场景4 399 5×5 1.91 地面背景干扰较大,
目标做快速移动场景5 749 2×2 0.49 地面背景干扰较大,
目标微弱,相似目标干扰场景6 499 3×3 0.42 地面背景干扰较大,
背景噪声杂乱
下载: 导出CSV
表 3 8种对比算法在不同场景下的距离精度
Table 3. Distance precision of 8 comparison algorithms in different scenarios
算法 场景 1 场景2 场景3 场景4 场景5 场景6 本文 1.000 1.000 1.000 0.984 0.921 1.000 ECO 1.000 0.427 1.000 1.000 0.613 0.628 STRCF 1.000 0.406 0.409 0.329 0.425 0.294 BACF 0.817 0.245 0.263 0.217 0.131 0.086 SRDCF 0.553 0.136 0.395 0.213 0.105 0.087 KCF 0.627 0.076 0.214 0.324 0.109 0.080 DSST 0.413 0.069 0.206 0.188 0.130 0.094 SAMF 0.368 0.072 0.204 0.124 0.036 0.021 注:加粗数字表示最优值。
下载: 导出CSV
表 4 8种对比算法在不同场景下的重叠精度
Table 4. Overlap precision of 8 comparison algorithms in different scenarios
算法 场景 1 场景2 场景3 场景4 场景5 场景6 本文 0.997 1.000 1.000 0.864 0.901 1.000 ECO 0.995 0.581 1.000 0.916 0.409 0.512 STRCF 0.892 0.023 0.294 0.423 0.308 0.477 BACF 0.503 0.259 0.168 0.397 0.256 0.382 SRDCF 0.506 0.182 0.617 0.308 0.101 0.113 KCF 0.616 0.174 0.289 0.105 0.164 0.026 DSST 0.627 0.019 0.254 0.113 0.029 0.184 SAMF 0.218 0.001 0.003 0.027 0.157 0.018 注:加粗数字表示最优值。
下载: 导出CSV
表 5 8种对比算法的跟踪速度
Table 5. Tracking speed of 8 comparison algorithms
算法 跟踪速度/(帧·s−1) 本文 94.7 ECO 18.6 STRCF 45.8 BACF 33.2 SRDCF 22.4 KCF 316.2 DSST 289.4 SAMF 46.9
下载: 导出CSV
-
[1] 房胜男, 谷小婧, 顾幸生. 基于自适应响应融合的相关滤波红外目标跟踪[J]. 红外与激光工程, 2019, 48(6): 479-486.FANG S N, GU X J, GU X S. Infrared target tracking with correlation filter based on adaptive fusion of responses[J]. Infrared and Laser Engineering, 2019, 48(6): 479-486(in Chinese). [2] YANG X, LI S Y, YU J T, et al. GF-KCF: aerial infrared target tracking algorithm based on kernel correlation filters under complex interference environment[J]. Infrared Physics & Technology, 2021, 119: 103958. [3] WANG X T, ZHANG K, ZHANG X M, et al. Aerial infrared object tracking via an improved long-term correlation filter with optical flow estimation and SURF matching[J]. Infrared Physics & Technology, 2021, 116: 103790. [4] ZHOU H, ZHANG Z Y, CHEN Z H, et al. Infrared dim small target tracking based on inter-frame consistency under complex background[C]//Proceedings of the 2021 2nd International Conference on Artificial Intelligence and Computer Engineering. Piscataway: IEEE Press, 2022: 728-735. [5] 常敏, 沈凯, 张学典, 等. 自适应特征融合和模型更新的相关滤波跟踪[J]. 光学学报, 2019, 39(9): 0915001.CHANG M, SHEN K, ZHANG X D, et al. Adaptive feature fusion and correlation filtering tracking for model updating[J]. Acta Optica Sinica, 2019, 39(9): 0915001(in Chinese). [6] WU S J, ZHANG K, LI S Y, et al. Joint feature embedding learning and correlation filters for aircraft tracking with infrared imagery[J]. Neurocomputing, 2021, 450: 104-118. [7] 卢明瑞, 韩超, 鲁帆, 等. 复杂场景下的自适应相关滤波跟踪算法[J]. 激光与光电子学进展, 2022, 59(24): 174-183.LU M R, HAN C, LU F, et al. Adaptive correlation filtering tracking algorithm in complex scene[J]. Laser & Optoelectronics Progress, 2022, 59(24): 174-183(in Chinese). [8] 姜珊, 张超, 韩成, 等. 基于相关滤波的目标重检测跟踪[J]. 红外与激光工程, 2021, 50(2): 224-235.JIANG S, ZHANG C, HAN C, et al. Target detection and tracking based on correlation filtering[J]. Infrared and Laser Engineering, 2021, 50(2): 224-235(in Chinese). [9] SHU Q Z, LAI H C, WANG L J, et al. Multi-feature fusion target re-location tracking based on correlation filters[J]. IEEE Access, 2021, 9: 28954-28964. [10] ZHA Y F, QIU Z L, SUN J X, et al. Learning spatial-channel regularization jointly with correlation filter for visual tracking[J]. Neurocomputing, 2021, 453: 839-852. [11] FAN B J. Spatial graph regularized multi-kernel subtask cross-correlation tracker[C]//Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2021: 14248-14253. [12] TANG M, ZHENG L Y, YU B, et al. Fast kernelized correlation filter without boundary effect[C]//Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press, 2021: 2998-3007. [13] YUAN D, SHU X, HE Z Y. TRBACF: learning temporal regularized correlation filters for high performance online visual object tracking[J]. Journal of Visual Communication and Image Representation, 2020, 72: 102882. [14] CHEN J, LIN Y M, HUANG D T, et al. Robust tracking algorithm for infrared target via correlation filter and particle filter[J]. Infrared Physics & Technology, 2020, 111: 103516. [15] PENG Z, LU X J. Learning region sparse constraint correlation filter for tracking[J]. Signal Processing: Image Communication, 2021, 90: 116042. [16] LI Z Z, CHEN C, LIU D P, et al. Infrared small target tracking algorithm based on temporal-spatial structure sparse Bayesian estimation[J]. Infrared Physics & Technology, 2020, 105: 103160. [17] TAI Y, TAN Y H, XIONG S Z, et al. Subspace reconstruction based correlation filter for object tracking[J]. Computer Vision and Image Understanding, 2021, 212: 103272. [18] PAVLOVIĆ M, BANJAC Z, KOVAČEVIĆ B. Object tracking in SWIR imaging based on both correlation and robust Kalman filters[J]. IEEE Access, 2023, 11: 63834-63851. [19] LIU P Q, DU J, HE S Y, et al. A real-time target tracking algorithm based on improved kernel correlation filter[C]//Proceedings of the 2021 5th International Conference on Imaging, Signal Processing and Communications. Piscataway: IEEE Press, 2021: 5-9. [20] FENG M Z, SONG K C, WANG Y Y, et al. Learning discriminative update adaptive spatial-temporal regularized correlation filter for RGB-T tracking[J]. Journal of Visual Communication and Image Representation, 2020, 72: 102881. [21] SHI G Q, ZHANG B Y, GENG X T, et al. Improvement of kernel correlation filtering algorithm based on Kalman filter[C]//Proceeding of the 2022 IEEE 17th International Conference on Control & Automation. Piscataway: IEEE Press, 2022: 394-399. [22] 回丙伟, 宋志勇, 范红旗, 等. 地/空背景下红外图像弱小飞机目标检测跟踪数据集[J]. 中国科学数据, 2020, 5(3): 286-297.HUI B W, SONG Z Y, FAN H Q, et al. A dataset for infrared image dim-small aircraft target detection and tracking under ground/air background[J]. China Scientific Data, 2020, 5(3): 286-297(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 184
- HTML全文浏览量: 70
- PDF下载量: 120
- 被引次数: 0
