



-
摘要:
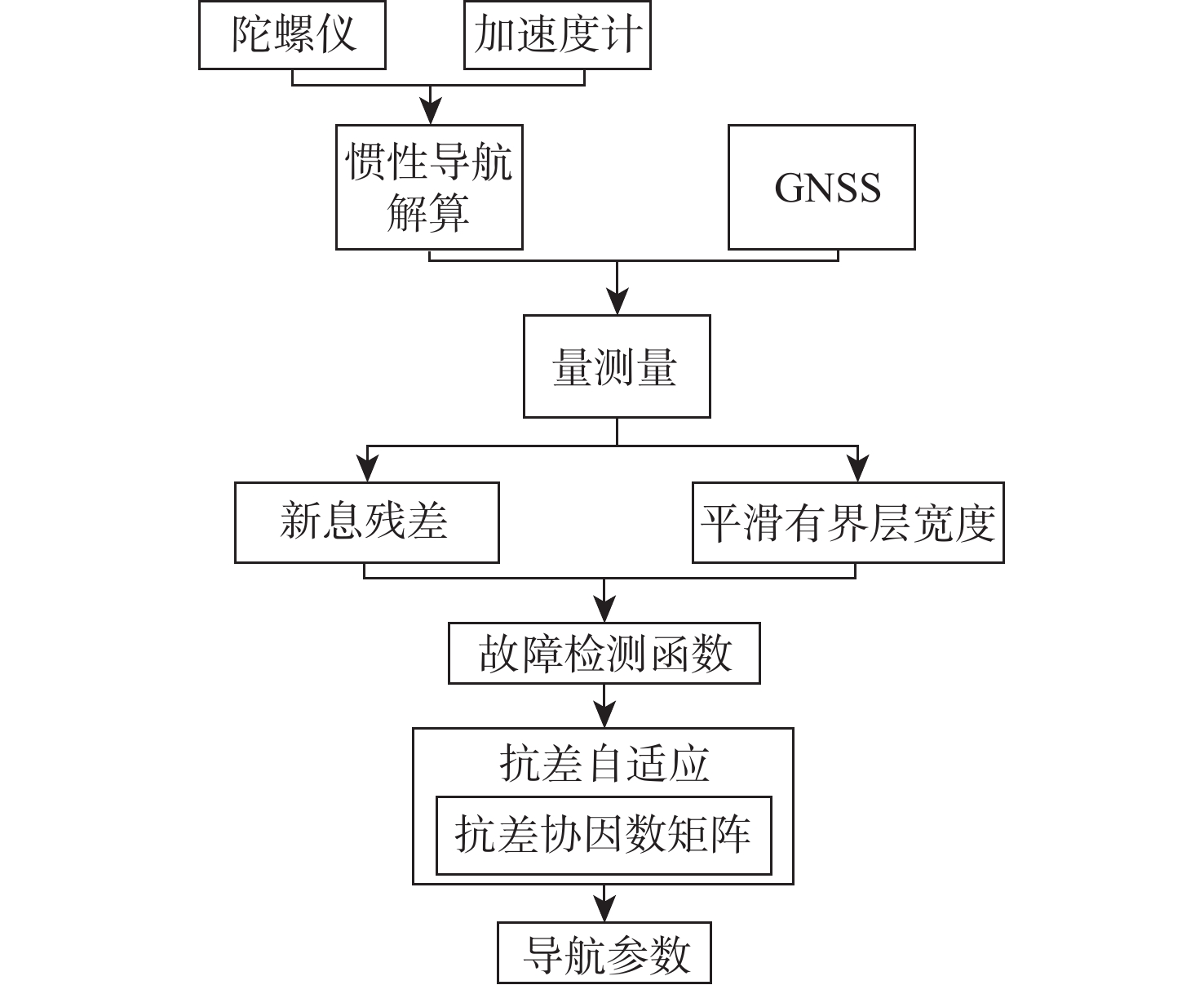
全球导航卫星系统(GNSS)信号易受到干扰产生故障,导致滤波器性能降低,影响全球导航卫星系统/捷联惯性导航系统(GNSS/SINS)组合导航系统输出精度。针对该问题,提出一种基于双参数的GNSS/SINS故障检测及抗差自适应算法。算法基于新息残差对系统量测数据进行评估,设计基于平滑有界层宽度的故障检测函数进行故障精确检测;利用故障检测函数值构造抗差协因数矩阵进行误差实时修正,提高状态估计的精度与鲁棒性。阶跃故障和缓变故障2类典型的GNSS故障实验结果表明:基于双参数的GNSS/SINS故障检测及抗差自适应算法与传统的基于残差卡方故障检测的抗差自适应算法相比,速度故障检测率提高7.6%~23.2%,位置故障检测率提高3.2%~12.3%;速度精度提高20.7%~27.1%,位置精度提高22.2%~34.6%。所提算法有效提高了GNSS/SINS组合导航系统的精度与鲁棒性。
Abstract:The global navigation satellite system (GNSS) signal is susceptible to interference, which leads to a decrease in filter performance and affects the output accuracy of the global navigation satellite system/strapdown inertial navigation system (GNSS/SINS) integrated navigation system. For this problem, this paper proposes a GNSS/SINS fault detection and robust adaptive algorithm based on two parameters. For precise fault detection, the algorithm creates a fault detection function based on the breadth of the smooth bounded layer and assesses the system measurement data using the innovation residual. Using fault detection function values to construct the robust cofactor matrix for real-time error correction to improve the accuracy and robustness of state estimation. The experimental findings of two common GNSS faults, step fault and slow fault, demonstrate that: the robust adaptive algorithm and the GNSS/SINS fault detection method based on two parameters are contrasted with the conventional robust adaptive algorithm based on residual chi-square fault detection techniques. The velocity fault detection rate is increased by 7.6%−23.2%, and the position fault detection rate is increased by 3.2%−12.3%. The velocity accuracy is increased by 20.7%−27.1%, and the position accuracy is increased by 22.2%−34.6%. The algorithm effectively improves the accuracy and robustness of the GNSS/SINS integrated navigation system.
-

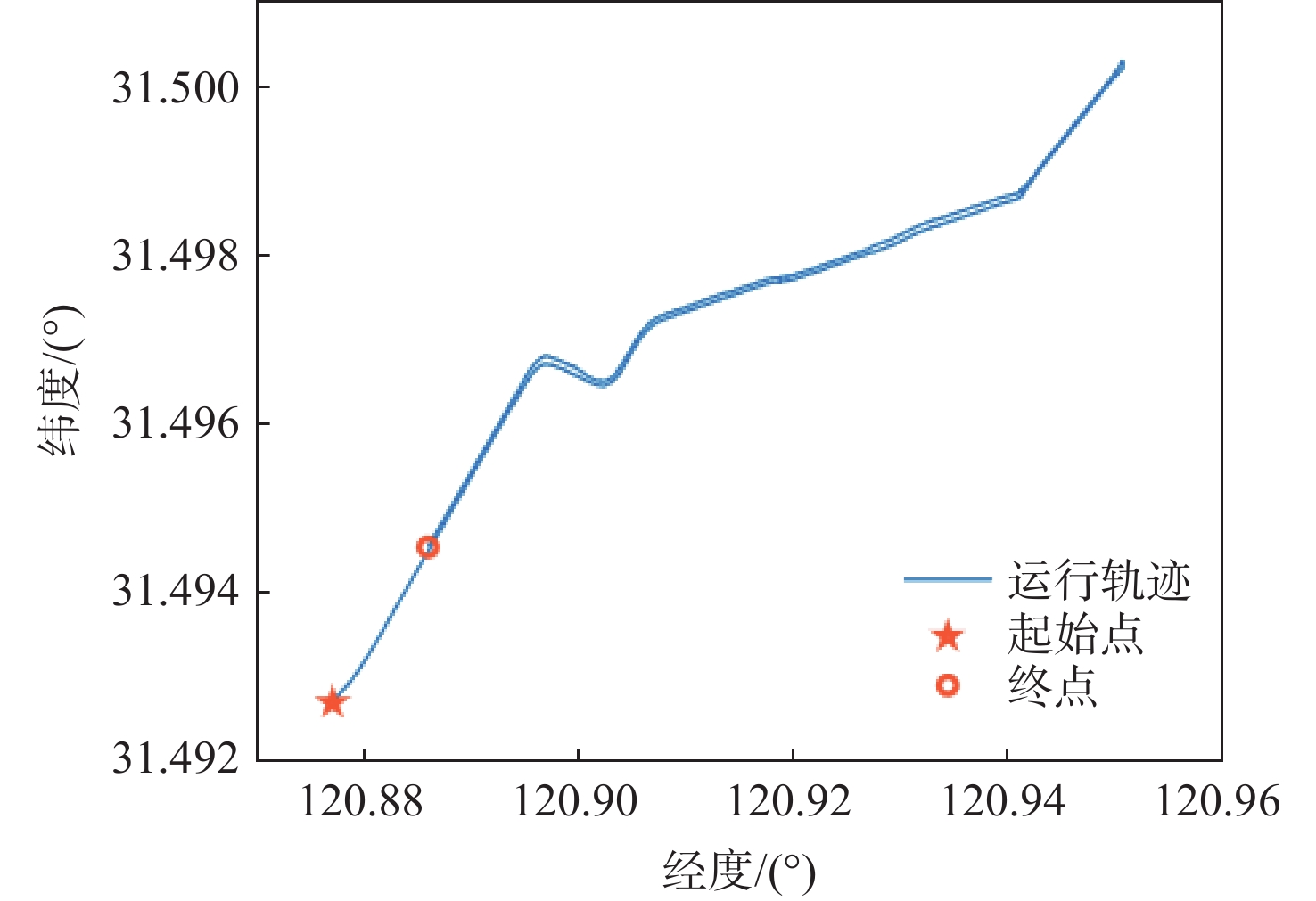
图 2 车载组合导航实验设备运行轨迹
Figure 2. Running trajectory of vehicle integrated navigation experimental equipment

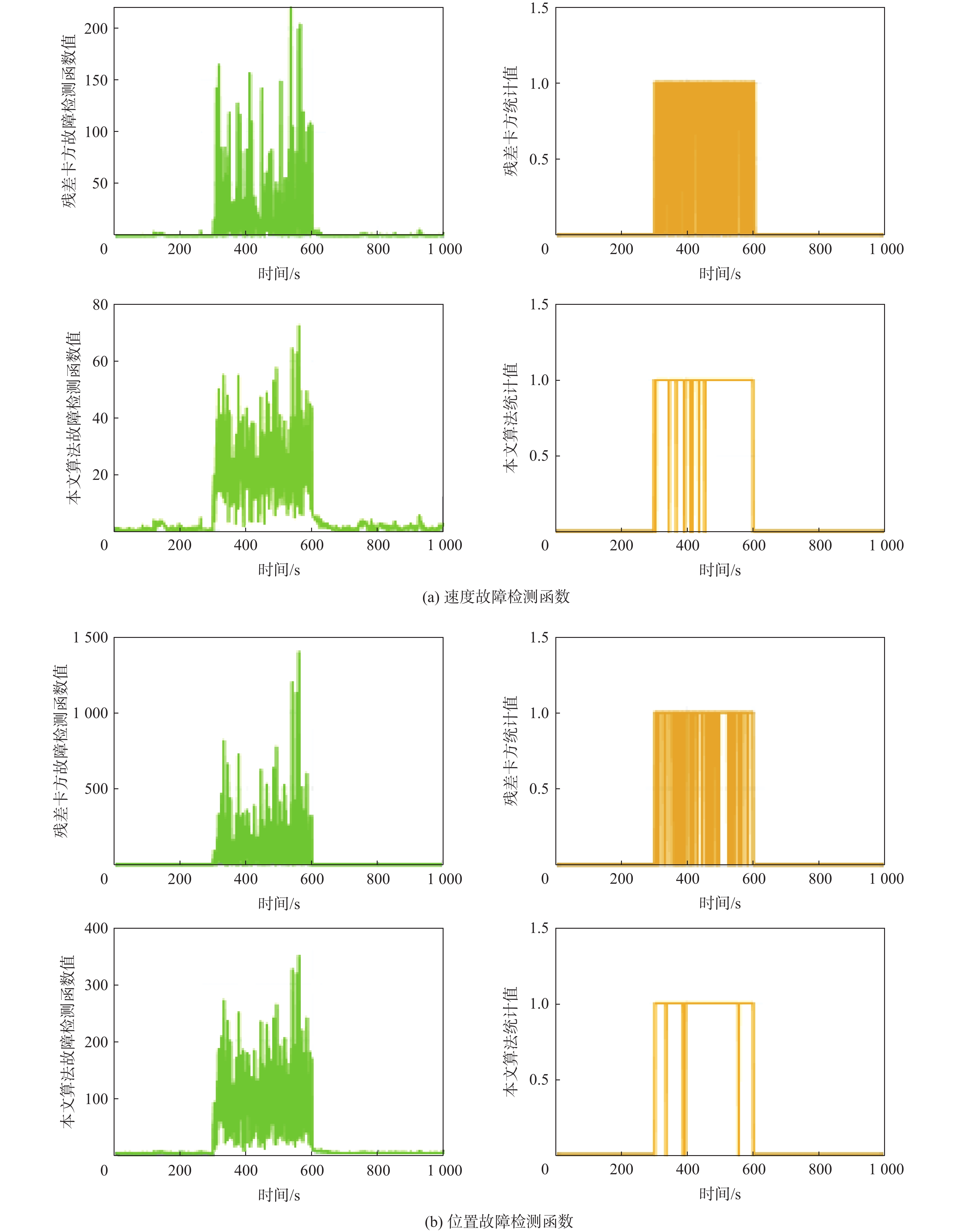
图 3 大阶跃故障下2种算法的故障检测函数
Figure 3. Fault detection functions of two algorithms under large step fault

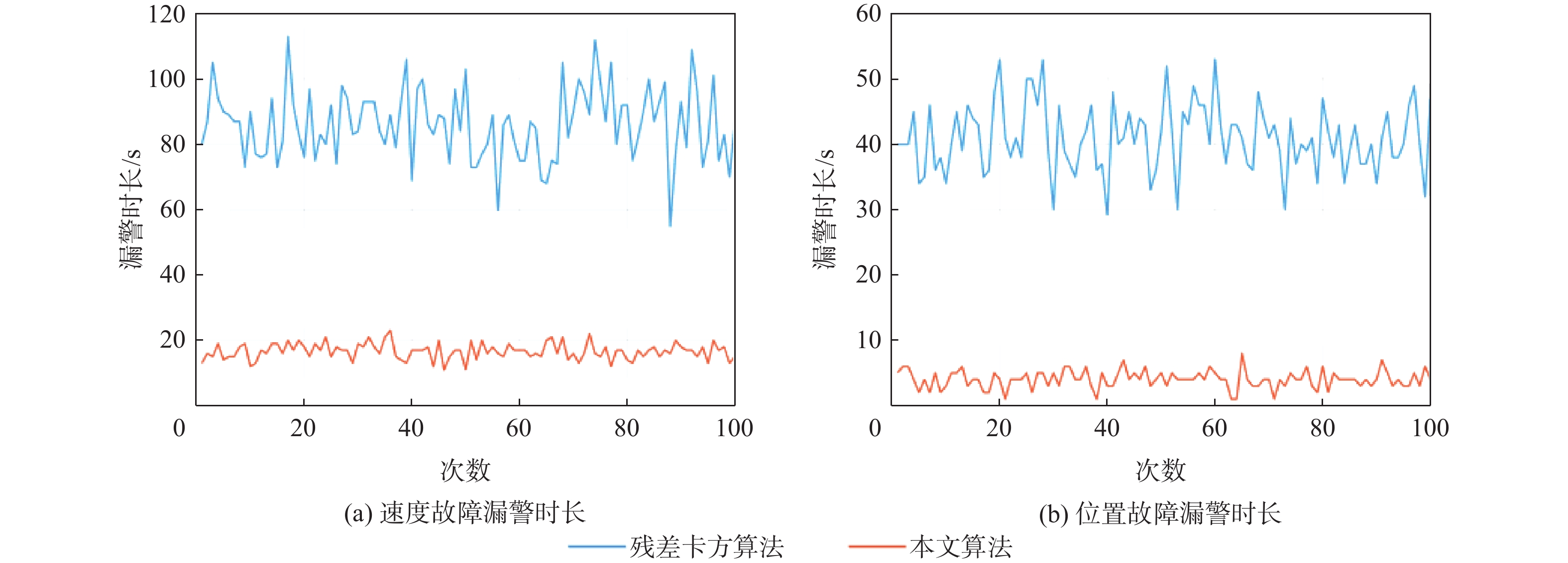
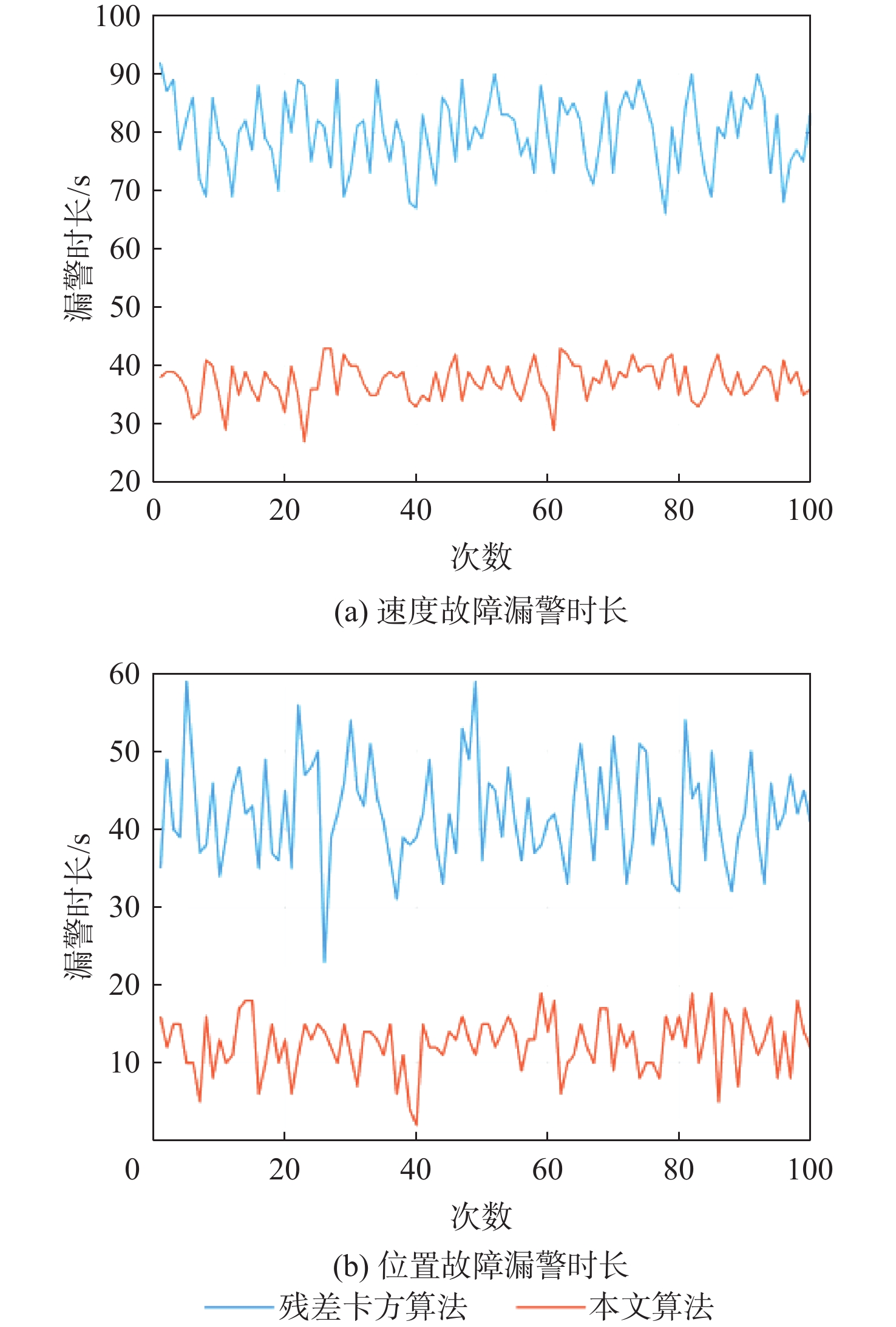
图 4 大阶跃故障下2种算法速度、位置故障的漏警时长
Figure 4. Missed alarm duration of velocity, position fault of two algorithms under large step fault

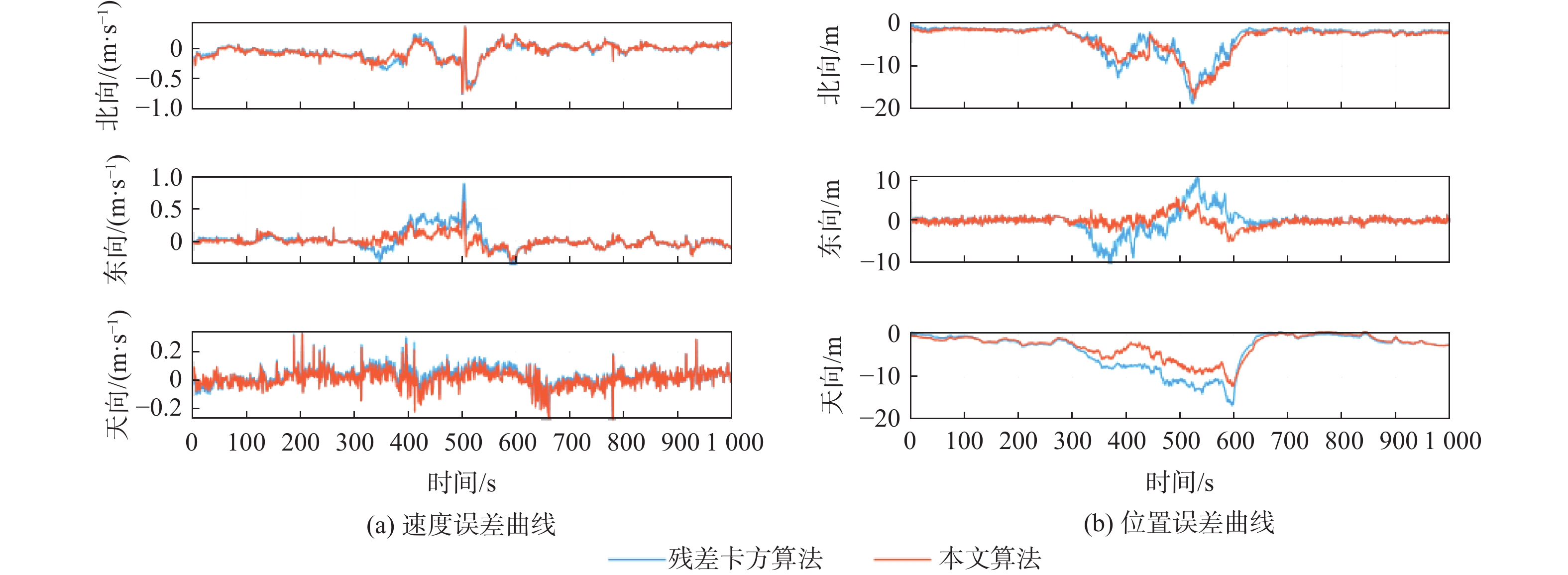
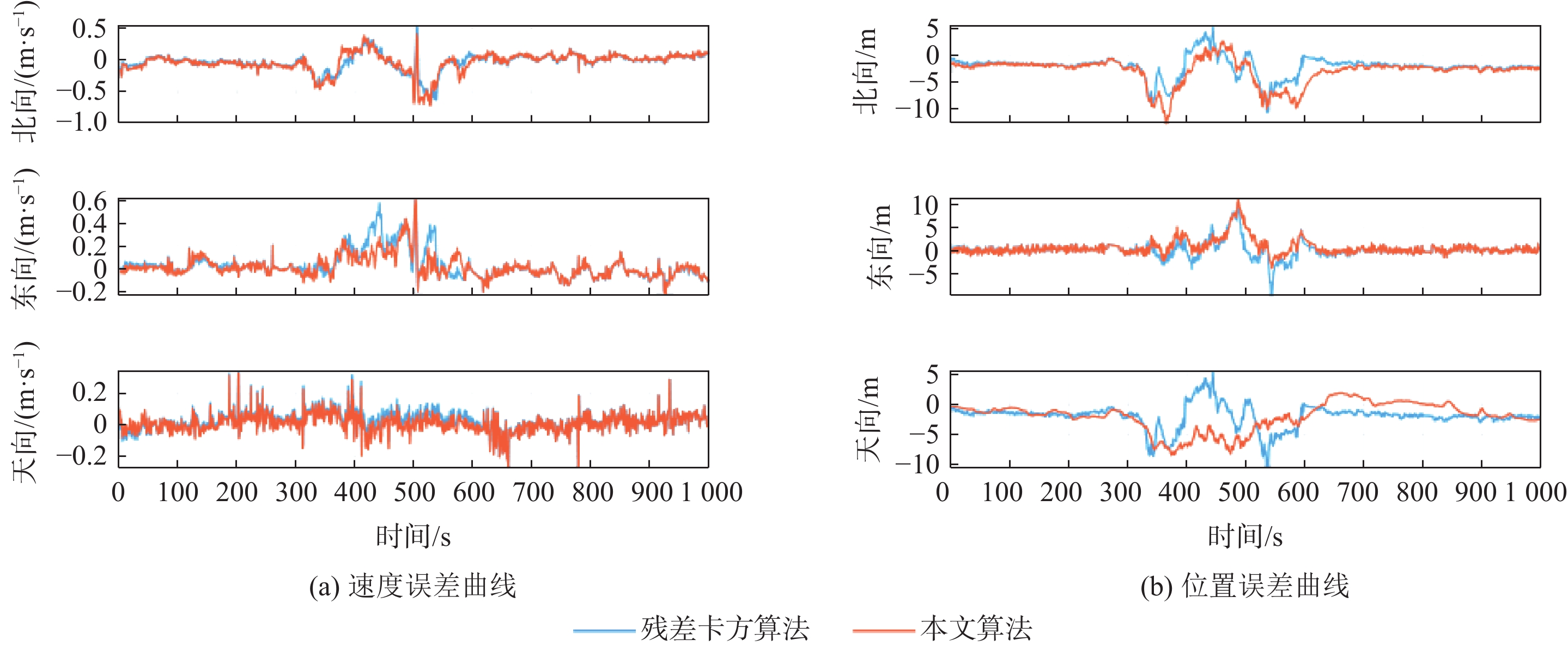
图 5 大阶跃故障下2种算法的速度、位置误差曲线
Figure 5. Velocity and position error curves of two algorithms under large step fault

图 6 小阶跃故障下2种算法的故障检测函数
Figure 6. Fault detection functions of two algorithms under small step fault

图 7 小阶跃故障下2种算法速度、位置故障的漏警时长
Figure 7. Missed alarm duration of velocity, position fault of two algorithms under small step fault

图 8 小阶跃故障下2种算法的速度、位置误差曲线
Figure 8. Velocity and position error curves of two algorithms under small step fault

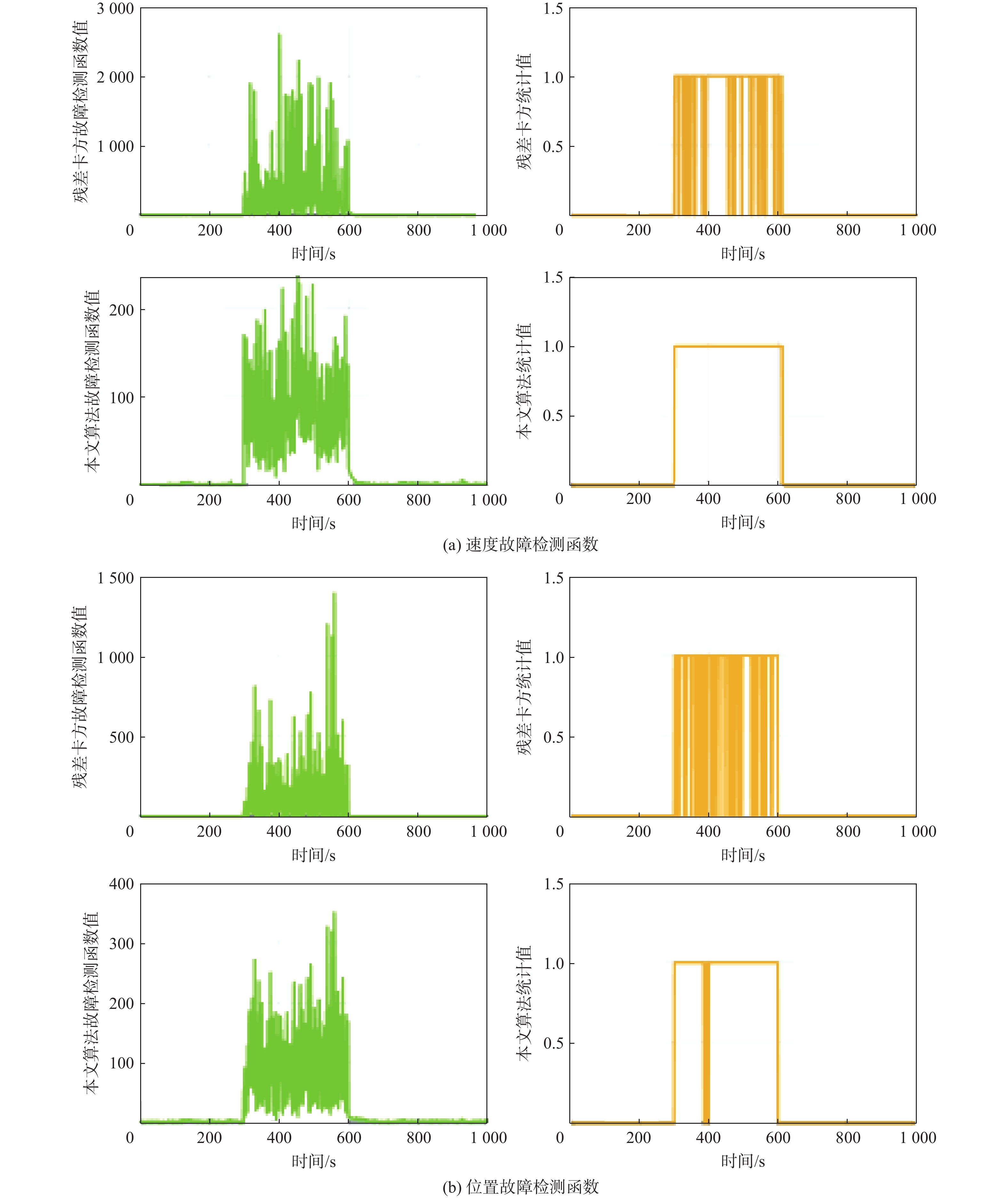
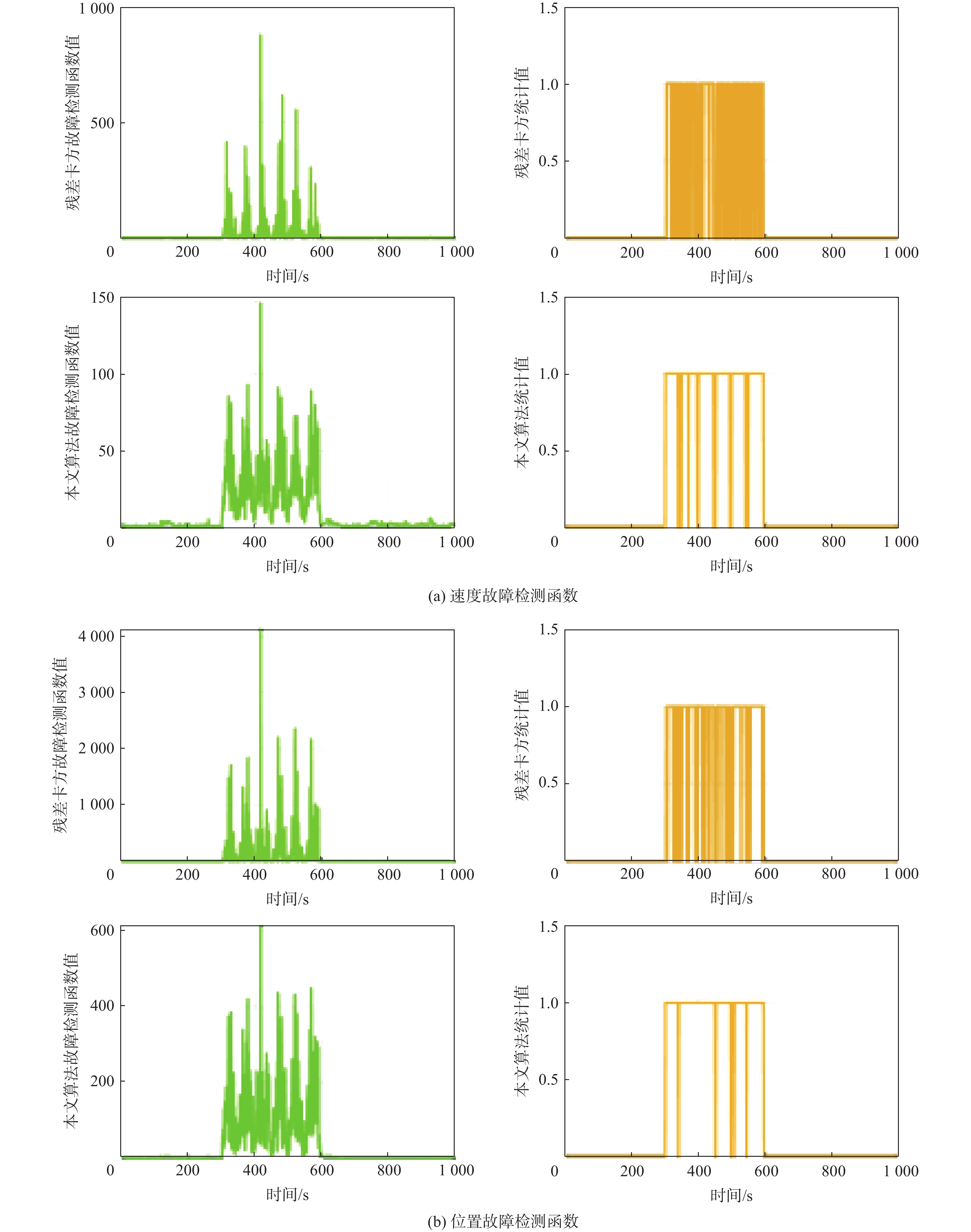
图 9 缓变故障下2种算法的故障检测函数
Figure 9. Fault detection functions of two algorithms under slowly-varying fault

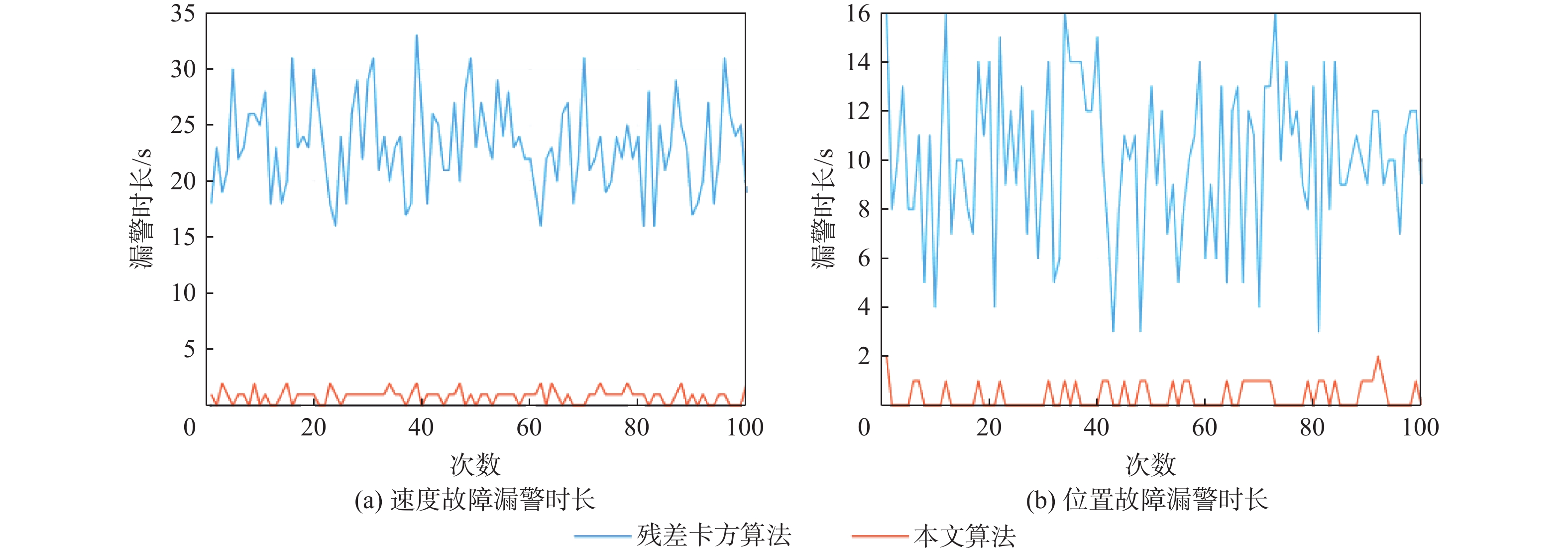
图 10 缓变故障下2种算法速度、位置故障的漏警时长
Figure 10. Missed alarm duration of velocity, position fault of two algorithms under slowly-varying fault

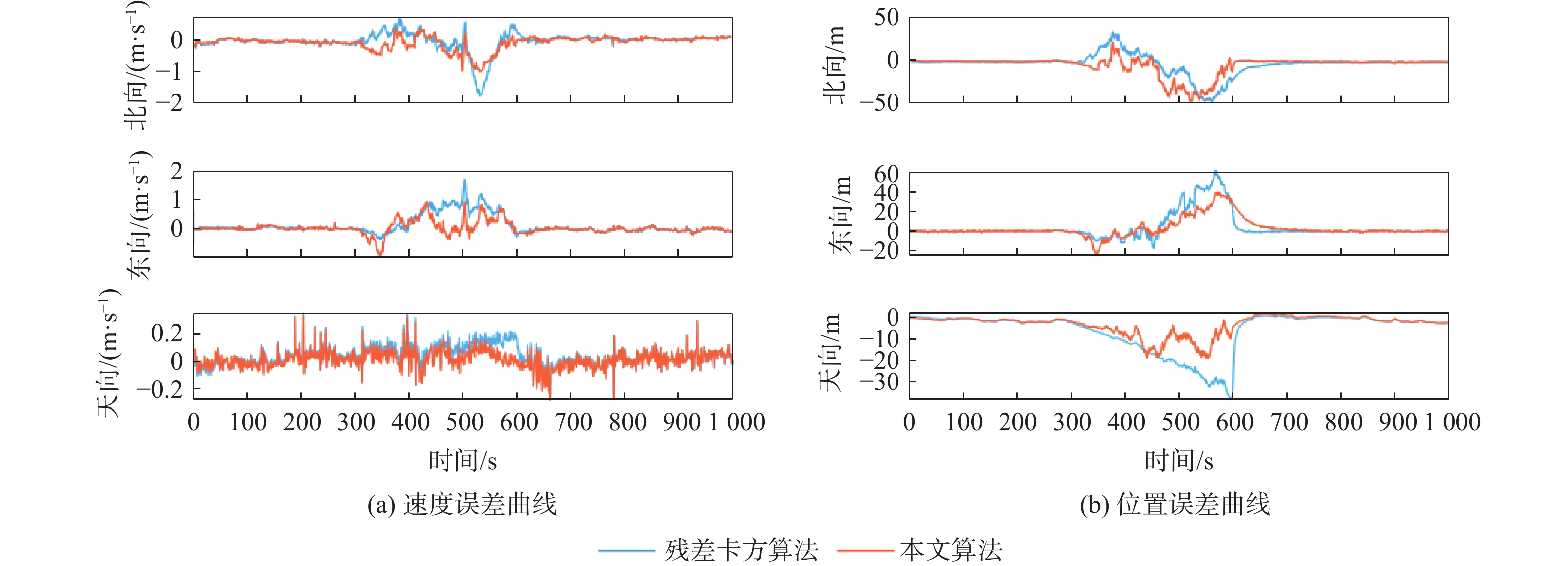
图 11 缓变故障下2种算法的速度、位置误差曲线
Figure 11. Velocity and position error curves of two algorithms under slowly-varying fault
表 1 GNSS和SINS设备参数
Table 1. Equipment parameters of GNSS and SINS
设备 陀螺仪 加速度计 零偏/((°)·h−1) 频率/Hz 零偏/((°)·h−1) 频率/Hz SINS 0.8 200 100 200 设备 速度 位置 误差/(m·s−1) 频率/Hz 零偏/(m·s−1) 频率/Hz GNSS 0.1 1 [10,10,30] 1  下载: 导出CSV
下载: 导出CSV
表 2 大阶跃故障下2种算法的检测效果对比
Table 2. Comparison of two fault detection algorithms under large step fault
算法 故障时段/s 首次故障检测时间/s 平均漏警时长/s 故障检测率/% 故障检测率提高比例/% 速度 位置 速度 位置 速度 位置 速度 位置 残差卡方 301~600 301 301 23.6 10.0 92.1 96.7 本文算法 301~600 301 301 0.8 0.3 99.7 99.9 7.6 3.2
下载: 导出CSV
表 3 大阶跃故障下2种算法的速度、位置均方根误差
Table 3. Root mean square error of velocity and position of two algorithms under large step fault
算法类型 速度均方根误差/(m·s−1) 位置均方根误差/m 精度提高比例/% 北向 东向 天向 北向 东向 天向 速度 位置 残差卡方 0.5329 0.6069 0.1240 22.1648 25.6196 19.6618 本文算法 0.4998 0.3840 0.0765 20.3972 16.9431 9.9366 27.1 30.4
下载: 导出CSV
表 4 小阶跃故障下2种算法的检测效果对比
Table 4. Comparison of two fault detection algorithms under small step fault
算法 故障时段/s 首次故障检测时间/s 平均漏警时长/s 故障检测率/% 故障检测率提高比例/% 速度 位置 速度 位置 速度 位置 速度 位置 残差卡方 301~600 301 301 86.2 40.9 71.3 86.4 本文算法 301~600 301 301 16.6 4.0 94.5 98.7 23.2 12.3
下载: 导出CSV
表 5 小阶跃故障下2种算法的速度、位置均方根误差
Table 5. Root mean square error of velocity and position of two algorithms under small step fault
算法 速度均方根误差/(m·s−1) 位置均方根误差/m 精度提高比例/% 北向 东向 天向 北向 东向 天向 速度 位置 残差卡方 0.2311 0.2581 0.0904 8.6048 4.8072 9.7146 本文算法 0.2025 0.1454 0.0709 7.7014 2.0342 6.2610 25.9 34.6
下载: 导出CSV
表 6 缓变故障下2种算法的检测效果对比
Table 6. Comparison of two fault detection algorithms under slowly-varying fault
算法 故障时段/s 首次故障检测时间/s 平均漏警时长/s 故障检测率/% 故障检测率提高比例/% 速度 位置 速度 位置 速度 位置 速度 位置 残差卡方 301~600 304 303 80.3 42.2 73.2 85.9 本文算法 301~600 301 301 37.7 12.4 87.6 95.7 14.4 9.8
下载: 导出CSV
表 7 缓变故障下2种算法的速度、位置均方根误差
Table 7. Root mean square error of velocity and position of two algorithms under slowly-varying fault
算法 速度均方根误差/(m·s−1) 位置均方根误差/m 精度提高比例/% 北向 东向 天向 北向 东向 天向 速度 位置 残差卡方 0.2679 0.2079 0.0817 5.7273 3.2642 8.1844 本文算法 0.2249 0.1500 0.0669 4.3514 3.0521 5.2217 20.7 22.2
下载: 导出CSV
-
[1] 李增科, 孙耀文, 陈昭冰, 等. 顾及组合导航闭环反馈的变分贝叶斯自适应滤波优化算法[J]. 测绘学报, 2023, 52(5): 725-737.LI Z K, SUN Y W, CHEN Z B, et al. Optimization of variational Bayesian-based adaptive filter for closed-loop feedback in integrated navigation[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(5): 725-737(in Chinese). [2] YANG L, LI Y, WU Y L, et al. An enhanced MEMS-INS/GNSS integrated system with fault detection and exclusion capability for land vehicle navigation in urban areas[J]. GPS Solutions, 2014, 18(4): 593-603. [3] ZHANG G H, XU P H, XU H S, et al. Prediction on the urban GNSS measurement uncertainty based on deep learning networks with long short-term memory[J]. IEEE Sensors Journal, 2021, 21(18): 20563-20577. [4] SUN R, XU L T, XUE D B, et al. GPS signal reception classification using adaptive neuro-fuzzy inference system[J]. Journal of Navigation, 2019, 72(3): 685-701. [5] THUMIGER N, DEGHAT M. A multi-agent deep reinforcement learning approach for practical decentralized UAV collision avoidance[J]. IEEE Control Systems Letters, 2021, 6: 2174-2179. [6] 王鼎杰, 孟德利, 李朝阳, 等. 抗野值自适应卫星/微惯性组合导航方法[J]. 仪器仪表学报, 2017, 38(12): 2952-2958.WANG D J, MENG D L, LI Z Y, et al. Adaptively outlier-restrained GNSS/MEMS-INS integrated navigation method[J]. Chinese Journal of Scientific Instrument, 2017, 38(12): 2952-2958(in Chinese). [7] NARASIMHAPPA M, MAHINDRAKAR A D, GUIZILINI V C, et al. MEMS-based IMU drift minimization: sage husa adaptive robust Kalman filtering[J]. IEEE Sensors Journal, 2020, 20(1): 250-260. [8] 刘子龙, 楼家祺. 基于正交性原理的组合导航系统故障检测[J]. 控制工程, 2024, 31(10): 1841-1848.LIU Z L, LOU J Q. Fault detection of integrated navigation system based on orthogonality principle[J]. Control Engineering of China, 2024, 31(10): 1841-1848(in Chinese). [9] 杨元喜, 任夏, 许艳. 自适应抗差滤波理论及应用的主要进展[J]. 导航定位学报, 2013, 1(1): 9-15.YANG Y X, REN X, XU Y. Main progress of adaptively robust filter with applications in navigation[J]. Journal of Navigation and Positioning, 2013, 1(1): 9-15(in Chinese). [10] 刘韬, 徐爱功, 隋心. 基于自适应抗差卡尔曼滤波的UWB室内定位[J]. 传感技术学报, 2018, 31(4): 567-572.LIU T, XU A G, SUI X. Adaptive robust Kalman filtering for UWB indoor positioning[J]. Chinese Journal of Sensors and Actuators, 2018, 31(4): 567-572(in Chinese). [11] 陈志高, 柳锐, 吴子豪, 等. 基于改进Sage-Husa自适应滤波的ADCP船速基准精确获取[J]. 哈尔滨工程大学学报, 2023, 44(10): 1732-1740.CHEN Z G, LIU R, WU Z H, et al. Obtaining a reference velocity of ADCP measurement on the basis of an improved adaptive Sage-Husa filtering algorithm[J]. Journal of Harbin Engineering University, 2023, 44(10): 1732-1740(in Chinese). [12] 严恭敏, 刘璠, 李梓阳, 等. 一种基于软卡方检测的自适应Kalman滤波方法[J]. 导航定位与授时, 2023, 10(4): 81-86.YAN G M, LIU F, LI Z Y, et al. An adaptive Kalman filter based on soft Chi-square test[J]. Navigation Positioning and Timing, 2023, 10(4): 81-86(in Chinese). [13] PRABHU G R, BHASHYAM S, GOPALAN A, et al. Sequential multi-hypothesis testing in multi-armed bandit problems: an approach for asymptotic optimality[J]. IEEE Transactions on Information Theory, 2022, 68(7): 4790-4817. [14] 高广乐, 高社生, 彭旭, 等. 渐消SPRT在SINS/CNS/SRS导航系统软故障诊断中的应用[J]. 中国惯性技术学报, 2020, 28(6): 834-840.GAO G L, GAO S S, PENG X, et al. Fading SPRT method for soft fault diagnosis in SINS/CNS/SRS integrated navigation system[J]. Journal of Chinese Inertial Technology, 2020, 28(6): 834-840(in Chinese). [15] HABIBI S. The smooth variable structure filter[J]. Proceedings of the IEEE, 2007, 95(5): 1026-1059. [16] 施常勇, 张丽敏. 平滑变结构滤波在航天器组合导航中的应用[J]. 中国惯性技术学报, 2017, 25(4): 478-482.SHI C Y, ZHANG L M. Application of SVSF in spacecraft integrated navigation system[J]. Journal of Chinese Inertial Technology, 2017, 25(4): 478-482(in Chinese). [17] LI Y W, LI G, LIU Y, et al. A novel smooth variable structure filter for target tracking under model uncertainty[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5823-5839. [18] 赵宾, 曾庆化, 刘建业, 等. 基于平滑有界层的故障检测及抗差自适应滤波算法[J]. 中国惯性技术学报, 2023, 31(3): 245-253.ZHAO B, ZENG Q H, LIU J Y, et al. Fault detection and robust adaptive filter algorithm based on smooth bounded layer[J]. Journal of Chinese Inertial Technology, 2023, 31(3): 245-253(in Chinese). [19] 顾明星, 刘卫, 胡媛, 等. 陀螺罗经和计程仪辅助的GNSS/SINS松组合导航系统[J]. 航天控制, 2021, 39(1): 8-14.GU M X, LIU W, HU Y, et al. A loosely coupled GNSS/SINS integrated navigation system assisted by gyroscope and vialog[J]. Aerospace Control, 2021, 39(1): 8-14(in Chinese). [20] 张景伟. INS/GPS/SAR组合导航系统关键问题研究[D]. 西安: 西北工业大学, 2003: 12-18.ZHANG J W. Research on key problems of INS/GPS/SAR integrated navigation system[D]. Xi’an: Northwestern Polytechnical University, 2003: 12-18(in Chinese). [21] 张超, 吕志伟, 柯晔, 等. 欺骗干扰影响下GNSS/INS松组合与紧组合比较[J]. 导航定位学报, 2022, 10(5): 18-24.ZHANG C, LYU Z W, KE Y, et al. Comparison of GNSS/INS loosely coupled and tightly coupled systems under spoofing interference[J]. Journal of Navigation and Positioning, 2022, 10(5): 18-24(in Chinese). [22] 陈帅. 平滑变结构滤波算法研究及其在惯性导航系统初始对准中的应用[D]. 哈尔滨: 哈尔滨工程大学, 2017: 20-30.CHEN S. Research on smoothing variable structure filtering algorithm and its application in initial alignment of inertial navigation system[D]. Harbin: Harbin Engineering University, 2017: 20-30(in Chinese). [23] 陈宇. 平滑变结构滤波方法及其在目标跟踪中的应用[D]. 西安: 西安电子科技大学, 2022: 18-23.CHEN Y. Smooth variable structure filtering methods and its application in target tracking[D]. Xi’an: Xidian University, 2022: 18-23(in Chinese). [24] 胡晓梅, 潘新龙, 刘成铭. GNSS/SINS组合导航的改进Sage-Husa自适应滤波算法[J]. 大地测量与地球动力学, 2023, 43(8): 791-794.HU X M, PAN X L, LIU C M. An improved Sage-Husa adaptive filtering algorithm for GNSS/SINS integrated navigation[J]. Journal of Geodesy and Geodynamics, 2023, 43(8): 791-794(in Chinese). [25] 刘正午, 孙蕊, 蒋磊. 基于伪距残差和新息的GNSS/IMU抗差自适应定位算法[J]. 北京航空航天大学学报, 2024, 50(4): 1316-1324.LIU Z W, SUN R, JIANG L. Robust adaptive position algorithm for GNSS/IMU based on pseudorange residual and innovation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(4): 1316-1324(in Chinese). [26] 苗岳旺, 周巍, 田亮, 等. 基于新息χ2检测的扩展抗差卡尔曼滤波及其应用[J]. 武汉大学学报(信息科学版), 2016, 41(2): 269-273.MIAO Y W, ZHOU W, TIAN L, et al. Extended robust Kalman filter based on innovation Chi-square test algorithm and its application[J]. Geomatics and Information Science of Wuhan University, 2016, 41(2): 269-273(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 209
- HTML全文浏览量: 99
- PDF下载量: 153
- 被引次数: 0
