



LiDAR aided GNSS/IMU positioning algorithm based on improved point cloud registration in urban environment
-
摘要:
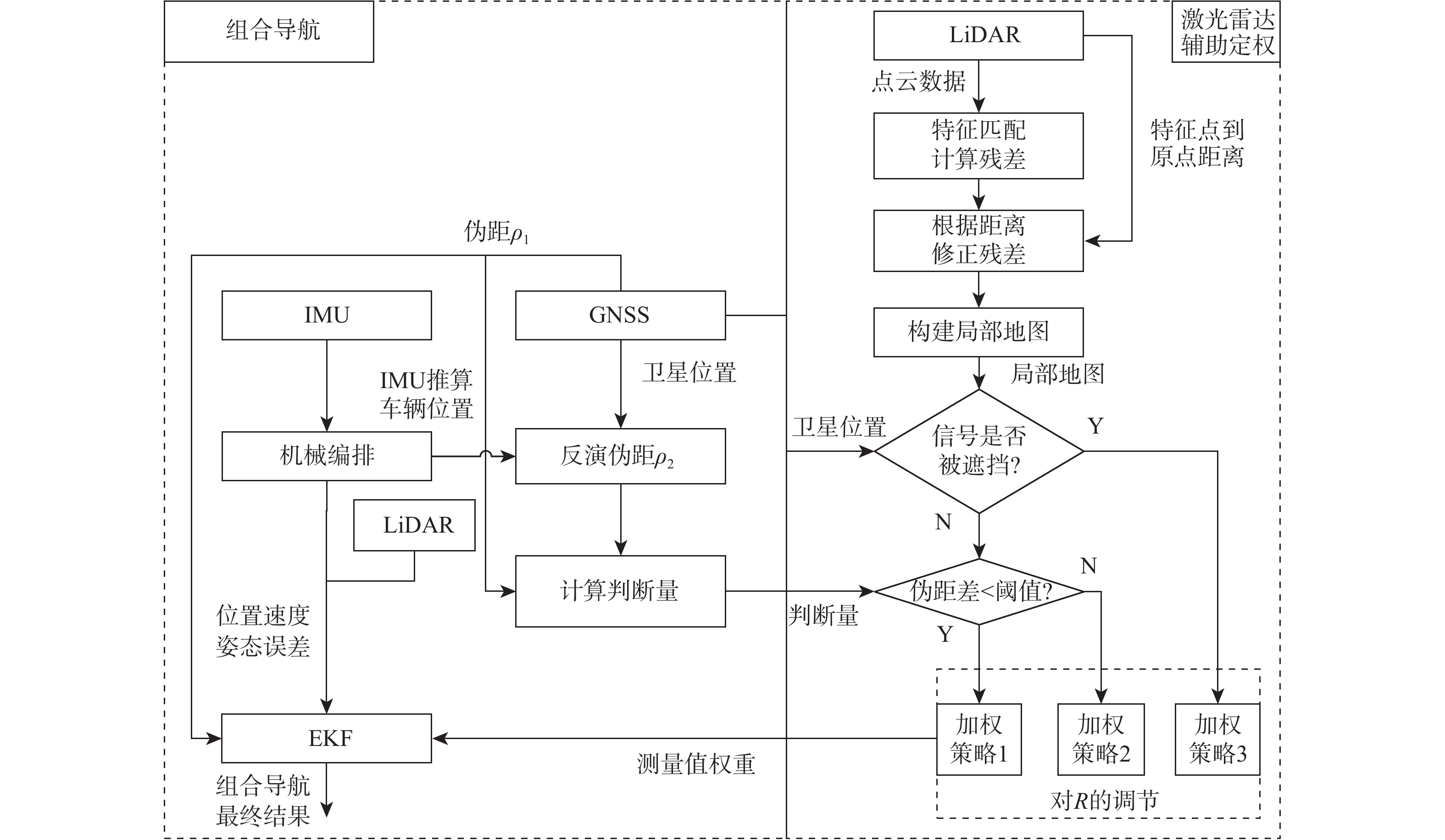
自动驾驶技术飞速发展,对城市环境定位精度的需求不断提升,但由于城市环境的复杂性,单纯的全球卫星导航系统(GNSS)和惯性测量单元(IMU)组合无法满足该需求。激光雷达(LiDAR)可实时感知周围环境,近年来成本不断降低,由于GNSS和LiDAR良好的互补特性,GNSS/IMU/LiDAR组合被广泛地研究。针对目前GNSS/IMV/LiDAR组合定位精度无法满足需求的问题,提出一种改进点云配准的LiDAR辅助GNSS/IMU定位方法。其中,算法构建了LiDAR配准时新增误差项和局部点云来实现GNSS质量控制,设计双差特征量综合判断卫星信号,实现不同信号质量的GNSS信号定权。实测实验表明,在城市环境中,所提算法对比传统GNSS/IMU紧组合算法,水平位置精度提高49.33%,三维位置精度提高48.31%,对比传统GNSS/IMU/LiDAR组合算法,水平、三维位置精度分别提高40.33%、37.60%。
-
关键词:
- GNSS/IMU/LiDAR组合导航 /
- 改进点云配准 /
- 局部点云地图 /
- 双差特征量
Abstract:Due to the complexity of urban environments, simple global navigation satellite system/inertial measurement unit (GNSS/IMU) cannot meet the positioning demand in urban environments. Light detection and ranging(LiDAR) can perceive the surrounding environment in real-time, and its cost has been continuously decreasing in recent years. Due to the good complementary characteristics, GNSS/IMU/LiDAR has been widely studied. An improved point cloud registration LiDAR assisted GNSS/IMU integrated navigation method is proposed. GNSS quality control is done by the algorithm by adding error terms in LiDAR registration, creating local point clouds, developing double difference feature quantities to evaluate satellite signals thoroughly, and achieving GNSS signal weighting for various signal qualities. Experimental results show that in urban environments, the proposed algorithm achieves a 49.33% improvement in horizontal position accuracy and a 48.31% improvement in 3D position accuracy compared to traditional GNSS/IMU algorithms. Compared to traditional GNSS/IMU/LiDAR algorithms, the horizontal 3D position accuracy has been improved by 40.33% and 37.60%, respectively.
-
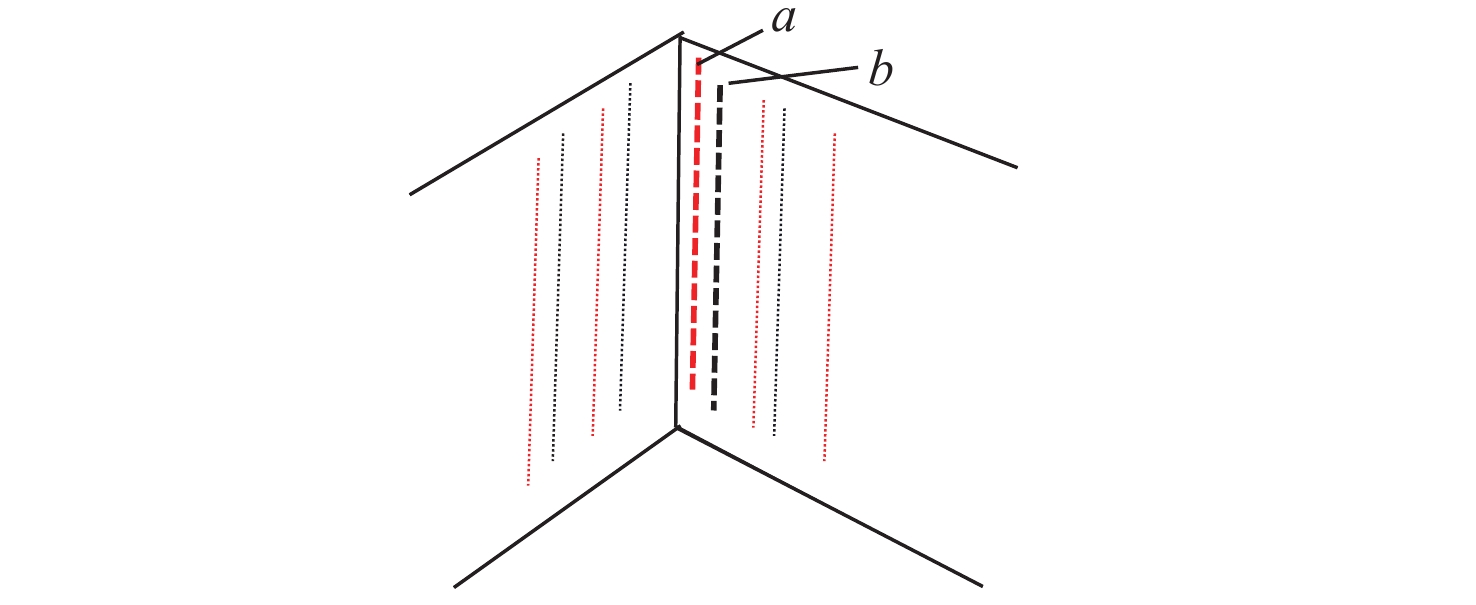
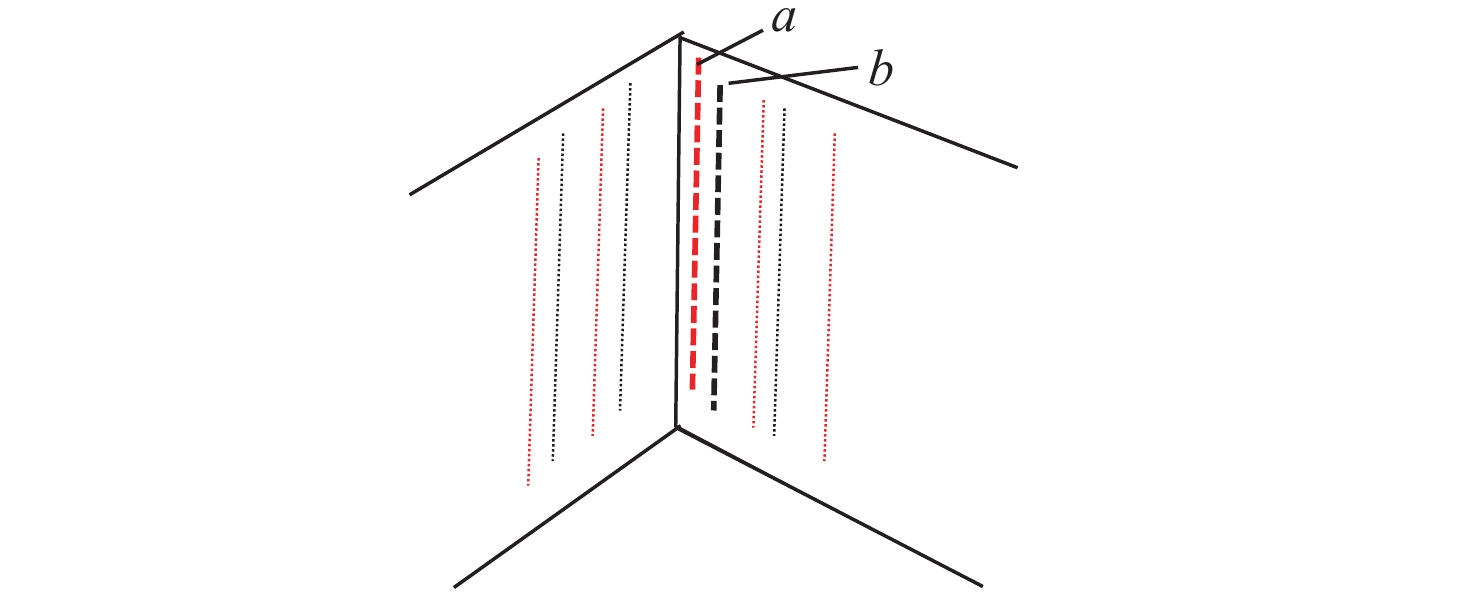
图 2 2帧特征线不完全重合示意图
Figure 2. Schematic diagram showing incomplete overlap of two feature lines
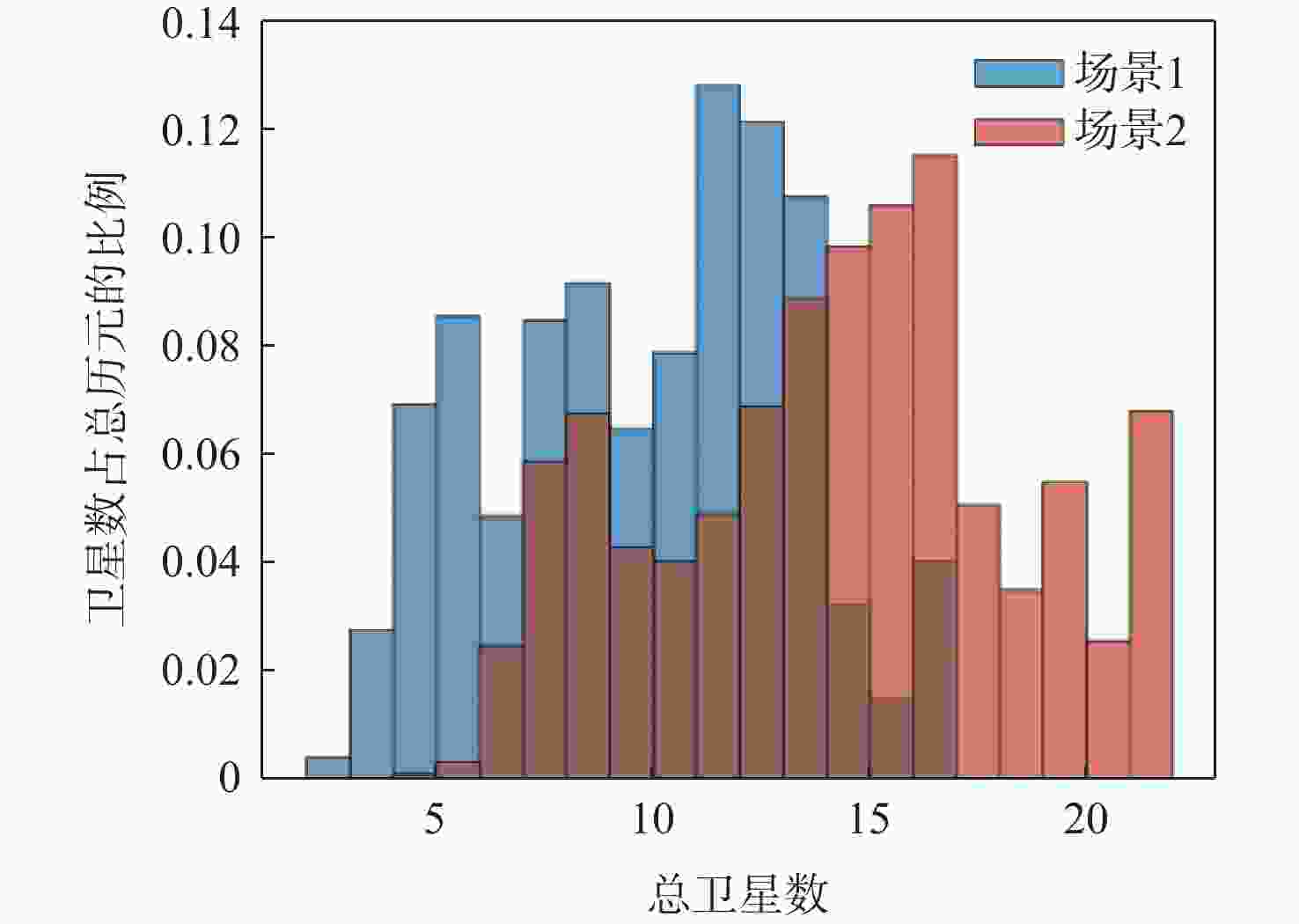
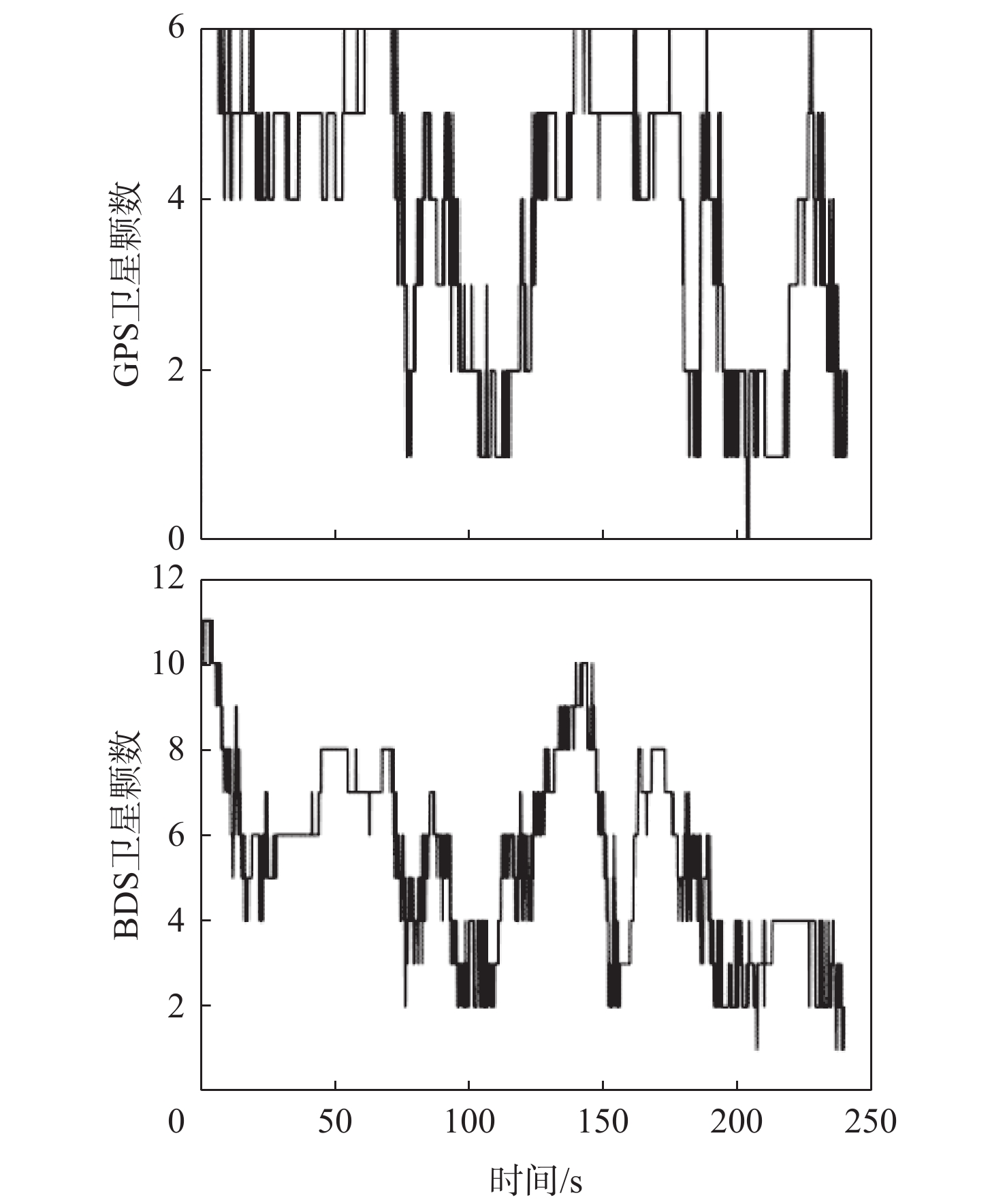
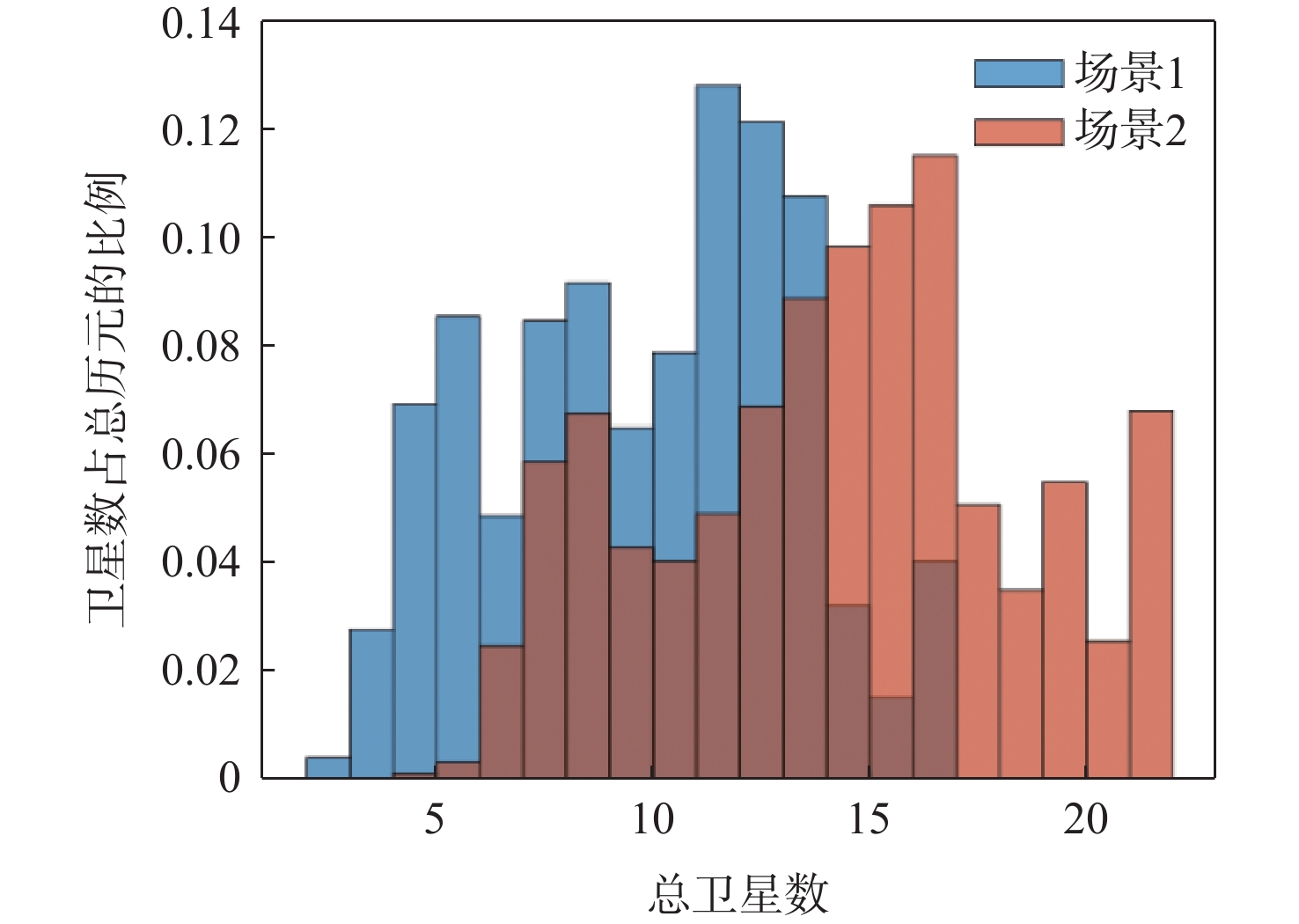
图 10 场景1和场景2卫星数分布对比直方图
Figure 10. Comparison of histograms of satellite number distribution in scenario 1 and scenario 2
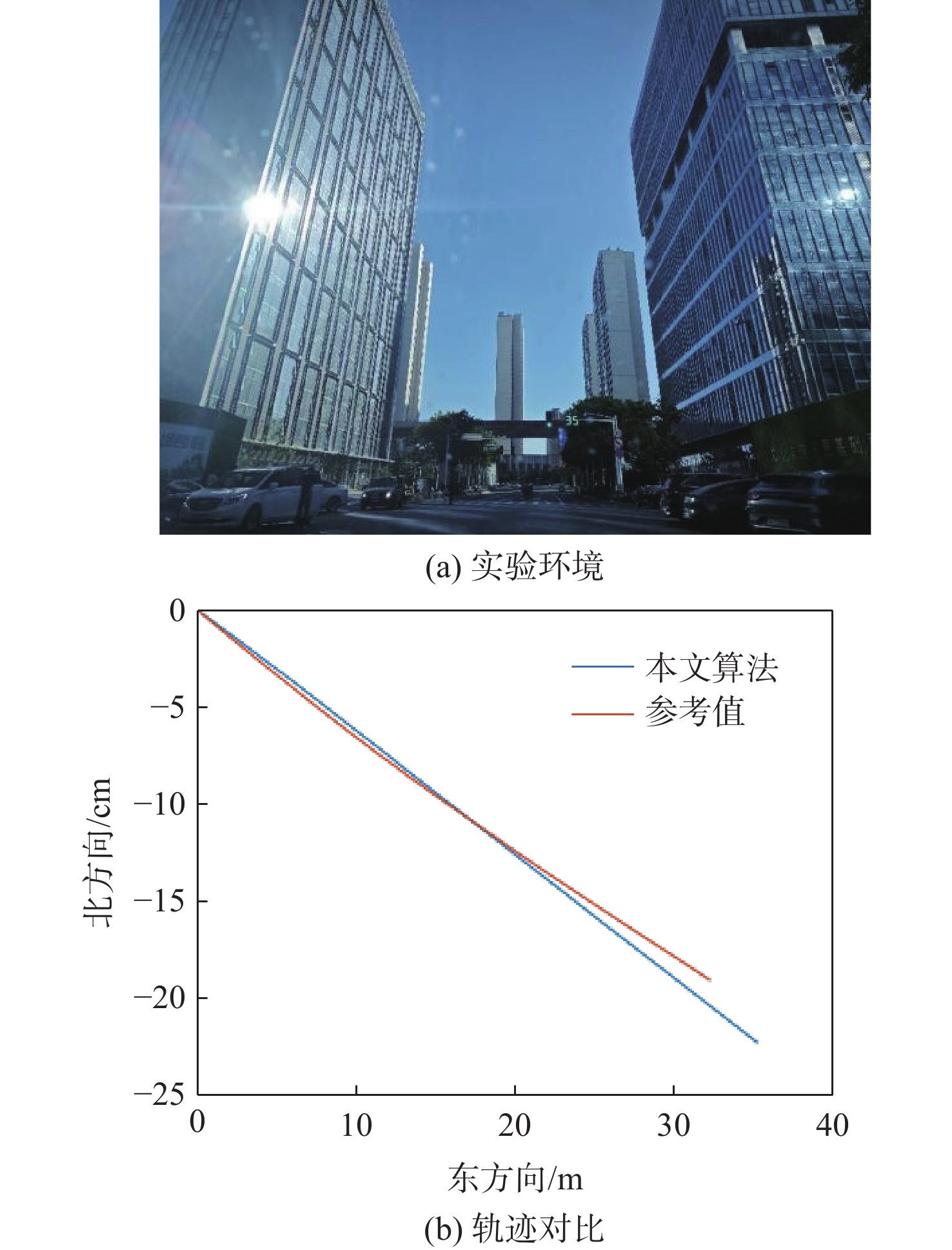
表 2 改进匹配残差算法与原算法的运动估计误差对比
Table 2. Comparison of motion estimation errors between the improved residual matching algorithm and the original algorithm
算法 东向位移/m 北向位移/m 天向位移/m 总距离/m 误差/m 参考轨迹 − 0.4804 36.8161 0.0258 36.97 原始匹配
残差算法− 0.1102 42.2444 0.0342 42.24 5.27 改进匹配
残差算法− 0.1065 41.3828 0.0405 41.38 4.41  下载: 导出CSV
下载: 导出CSV
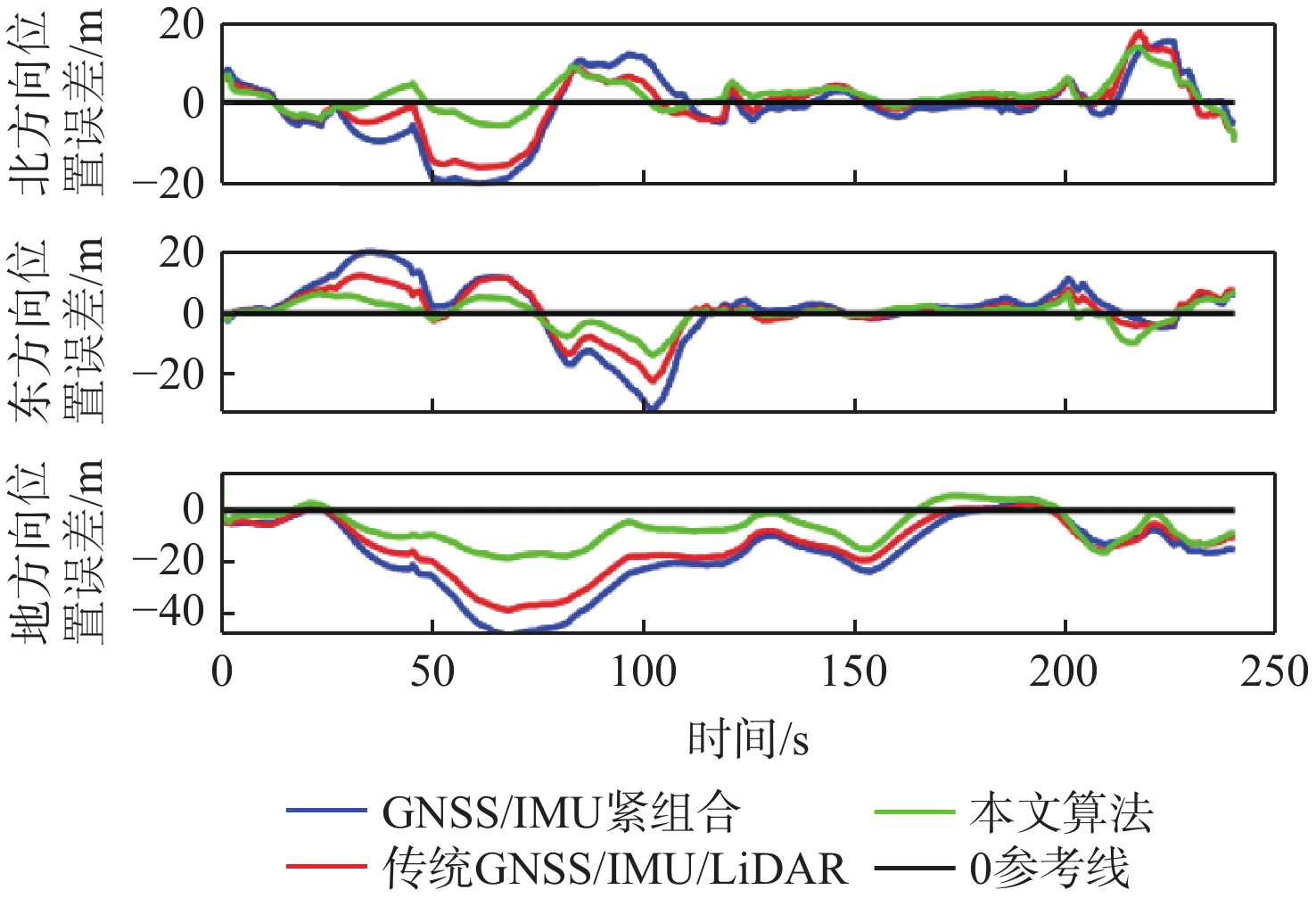
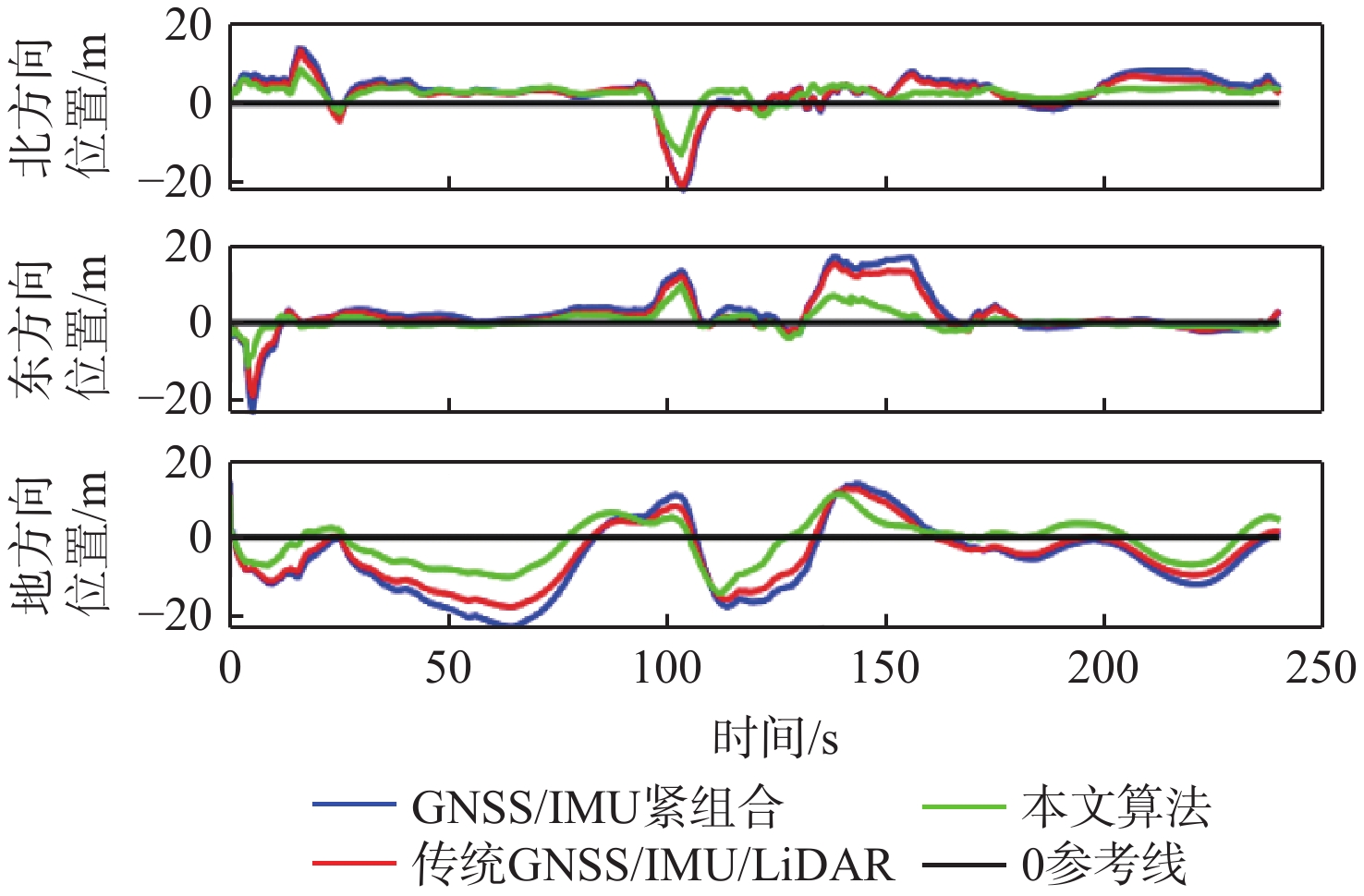
表 3 场景1位置误差
Table 3. Scenario 1 analysis of position error
算法 北方向位置误差/m 东方向位置误差/m 地方向位置误差/m 水平位置误差/m 三维位置误差/m GNSS/IMU紧组合(算法1) 8.31 10.39 21.44 13.31 25.23 传统GNSS/IMU/LiDAR(算法2) 6.67 7.06 17.20 9.72 19.76 本文算法 4.20 4.21 9.26 5.94 11.00
下载: 导出CSV
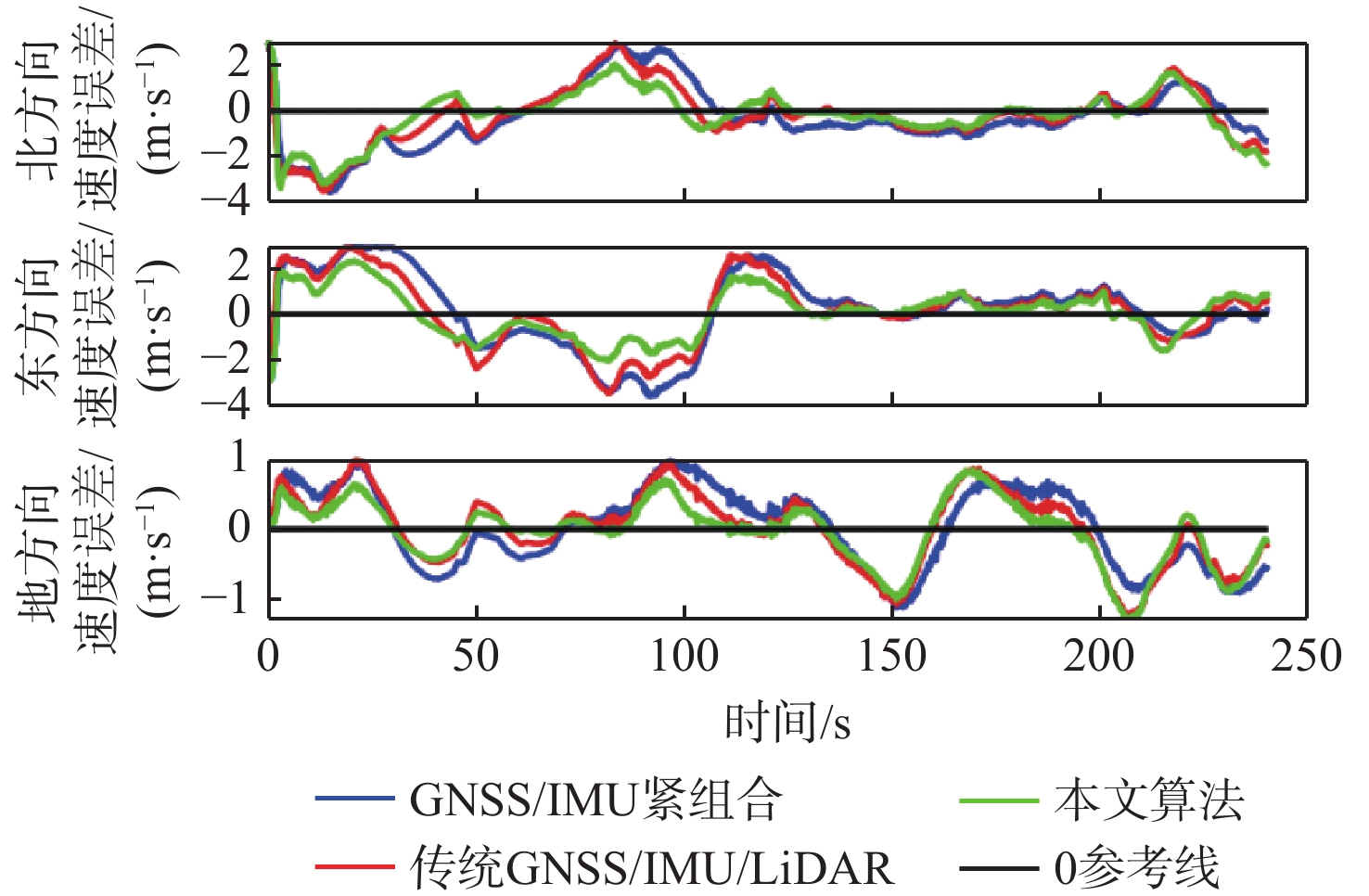
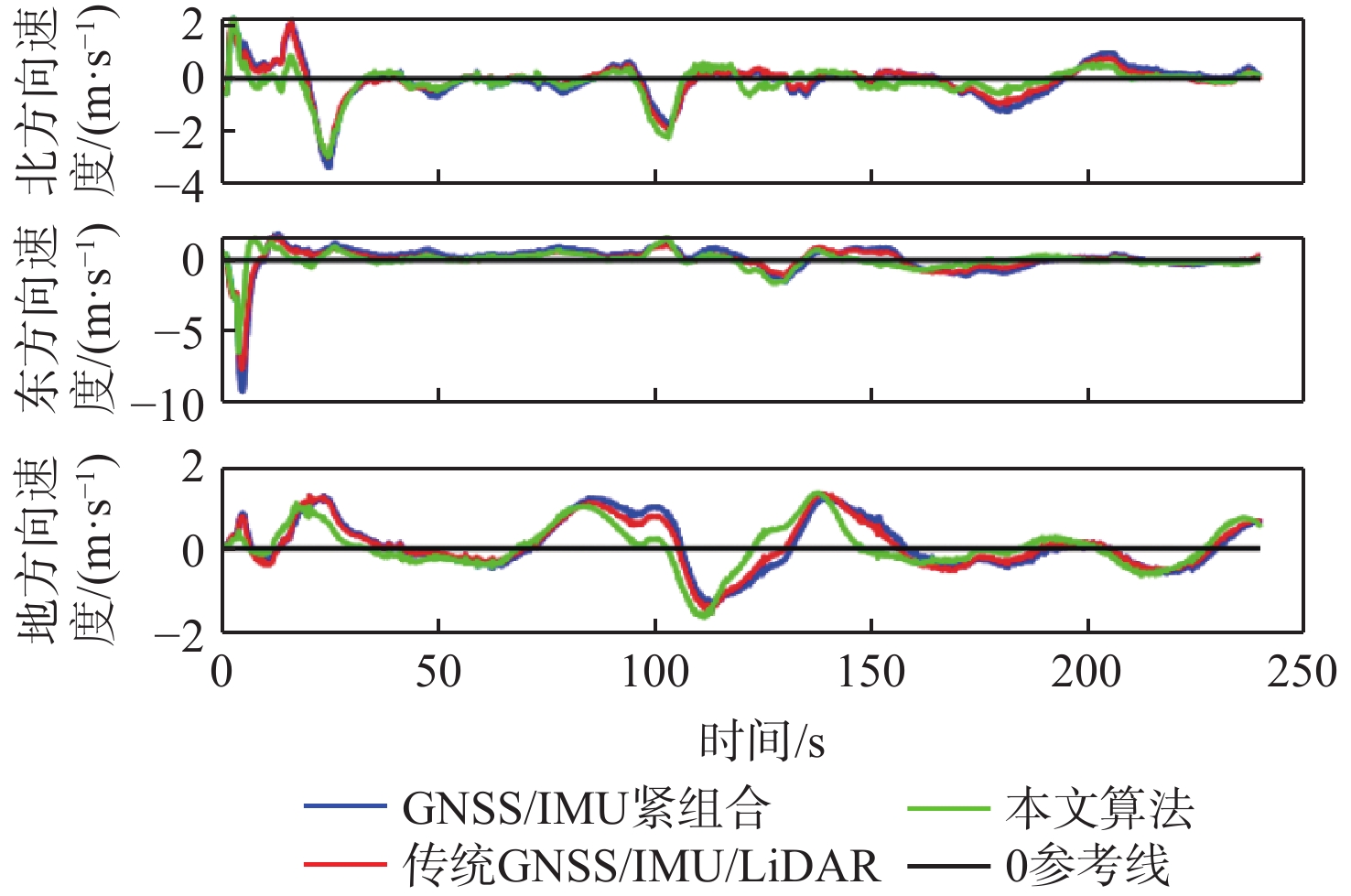
表 4 场景1速度误差
Table 4. Scenario 1 analysis of velocity error
算法 北方向
速度误差/(m·s−1)东方向
速度误差/(m·s−1)地方向
速度误差/(m·s−1)水平速度
误差/(m·s−1)三维速度
误差/(m·s−1)GNSS/IMU紧组合(算法1) 1.64 1.35 0.54 2.12 2.19 传统GNSS/IMU/LiDAR(算法2) 1.44 1.24 0.50 1.91 1.97 本文算法 1.06 1.03 0.43 1.48 1.54
下载: 导出CSV
表 5 场景2位置误差
Table 5. Scenario 2 analysis of position error
算法 北方向位置误差/m 东方向位置误差/m 地方向位置误差/m 水平位置误差/m 三维位置误差/m GNSS/IMU紧组合(算法1) 5.56 6.21 10.89 8.39 13.75 传统GNSS/IMU/LiDAR(算法2) 4.98 5.10 8.89 7.13 11.39 本文算法 3.53 2.70 5.69 4.25 7.11
下载: 导出CSV
表 6 场景2速度误差
Table 6. Scenario 2 analysis of velocity error
算法 北方向
速度误差/(m·s−1)东方向
速度误差/(m·s−1)地方向
速度误差/(m·s−1)水平速度
误差/(m·s−1)三维速度
误差/(m·s−1)GNSS/IMU紧组合(算法1) 1.02 0.68 0.60 1.22 1.36 传统GNSS/IMU/LiDAR(算法2) 0.84 0.61 0.58 1.04 1.20 本文算法 0.63 0.58 0.53 0.86 1.01
下载: 导出CSV
-
[1] KOHLBRECHER, S, VON STRYK O, MEYER J, et al. A flexible and scalable SLAM system with full 3D motion estimation[C]//Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics . Piscataway: IEEE Press, 2011: 155-160. [2] BRY A, BACHRACH A, ROY N. State estimation for aggressive flight in GPS-denied environments using onboard sensing[C]// Proceedings of the 2012 IEEE International Conference on Robotics and Automation . Piscataway: IEEE Press, 2012: 1-8. [3] SHEN S J, MICHAEL N, KUMAR V. Autonomous multi-floor indoor navigation with a computationally constrained MAVC]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2011: 20-25. [4] FALLON M F, JOHANNSSON H, BROOKSHIRE J, et al. Sensor fusion for flexible human-portable building-scale mapping[C]//Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2012: 4405-4412. [5] Joerger M, Pervan B. Range-domain integration of GPS and laser scanner measurements for outdoor navigation[C]//In Proceedings of the ION GNSS 19th International Technical Meeting. Fort Worth: [s.n.], 2006: 1115-1123. [6] HENTSCHEL M, WULF O, WAGNER B. A GPS and laser-based localization for urban and non-urban outdoor environments[C]//Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2008: 149-154. [7] SOLOVIEV A. Tight coupling of GPS, laser scanner, and inertial measurements for navigation in urban environments[C]//Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium. Piscataway: IEEE Press, 2008: 511-525. [8] JABBOUR M, BONNIFAIT P. Backing up GPS in urban areas using a scanning laser[C]// Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium. Piscataway: IEEE Press, 2008: 505-510. [9] SOLOVIEV A, BATES D, VAN G F. Tight coupling of laser scanner and inertial measurements for a fully autonomous relative navigation solution[J]. Navigation, 2007, 54: 189-205. [10] LIU S F, ATIA M M, KARAMAT T B, et al. A LiDAR-aided indoor navigation system for UGVs[J]. Journal of Navigation, 2015, 68(2): 253-273. [11] GARULLI A, GIANNITRAPANI A, ROSSI A , et al. Mobile robot SLAM for line-based environment representation[C]//Proceedings of the 44th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2005: 2041-2046. [12] YOKOZUKA M, KOIDE K, OISHI S , et al. LiTAMIN2: ultra light LiDAR-based SLAM using geometric approximation applied with KL-divergence[C]// Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2021: 11619-11625. [13] 雷道竖, 刘海波. 一种极坐标系下的激光雷达扫描匹配SLAM方法[J]. 中国电子科学研究院学报, 2019, 14(6): 563-567.LEI D S, LIU H B. A SLAM method based on LiDAR scan matching in the polar coordinates[J]. Journal of China Academy of Electronics and Information Technology, 2019, 14(6): 563-567(in Chinese). [14] 廖自威, 李荣冰, 雷廷万, 等. 基于几何特征关联的室内扫描匹配SLAM方法[J]. 导航与控制, 2016, 15(3): 26-32.LIAO Z W, LI R B, LEI T W, et al. Indoor scan-matching SLAM method based on geometric features association[J]. Navigation and Control, 2016, 15(3): 26-32(in Chinese). [15] 谢勃, 张燕. 基于LiDAR点云的建筑物激光扫描重构方法仿真[J]. 计算机仿真, 2021, 38(8): 435-439.XIE B, ZHANG Y. Simulation of LiDAR point cloud based laser scanning reconstruction method for buildings[J]. Computer Simulation, 2021, 38(8): 435-439(in Chinese). [16] CHEN C X, PEI L, XU C Q, et al. Trajectory optimization of LiDAR SLAM based on local pose graph[C]//China Satellite Navigation Conference 2019 Proceedings. Berlin: Springer, 2019: 360-370. [17] WEN W S, ZHANG G H, HSU L T . Exclusion of GNSS NLOS receptions caused by dynamic objects in heavy traffic urban scenarios using real-time 3D point cloud: an approach without 3D maps[C]//Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium. Piscataway: IEEE Press, 2018: 158-165. [18] HSU L T, GU Y L, KAMIJO S. 3D building model-based pedestrian positioning method using GPS/GLONASS/QZSS and its reliability calculation[J]. GPS Solutions, 2016, 20(3): 413-428. [19] CHEN Y W, ZHU L L, TANG J, et al. Feasibility study of using mobile laser scanning point cloud data for GNSS line of sight analysis[J]. Mobile Information Systems, 2017, 2017: 5407605. [20] WEN W S. 3D LiDAR aided GNSS and its tightly coupled integration with INS via factor graph optimization[C]// Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation. Vancouver: Institute of Navigation, 2020: 1649-1672. [21] 文刚, 周仿荣, 李涛, 等. LINS-GNSS: 滤波与优化耦合的GNSS/INS/LiDAR巡检机器人定位方法[J]. 南京信息工程大学学报: 自然科学版, 2023, 15(1): 85-93.WEN G, ZHOU F R, LI T, et al. LINS-GNSS: filter and optimization coupled GNSS/INS/LiDAR positioning method for inspection robot localization[J]. Journal of Nanjing University of Information Science & Technology (Natural Science Edition), 2023, 15(1): 85-93(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 313
- HTML全文浏览量: 84
- PDF下载量: 120
- 被引次数: 0
