



-
摘要:
精准高效的船只目标检测在确保海洋利益和构建海洋强国中发挥着重要作用,其现实价值显著。然而,现有的基于可见光遥感图像的船只检测算法大多依赖于锚框,计算量大、超参数多且算法的泛化能力有限。尽管自然图像目标检测算法通过采用无锚的方法改进了这些问题,但大部分只能实现水平框目标检测,无法应对船只目标形状狭长、角度分布不同和排列紧密等特点。针对这些问题,设计一种无锚旋转框遥感图像船只目标检测算法。在CenterNet的基础上,针对遥感图像船只检测任务,提出一种基于分布先验的置信度系数预测分支来产生更高质量的正样本;一种基于双曲激活的角度预测分支来限制角度的输出空间,得到更准确度旋转角度表示;同时,该算法采用柔性正负样本标签分配策略,以提供动态的精细化的监督信息,加速网络的收敛。在HRSC2016数据集上的实验验证了所设计算法相比与其他先进对比算法的优越性,并证实了所设计的各模块的有效性。
Abstract:Accurate and efficient ship detection plays a crucial role in safeguarding maritime interests and building a maritime powerhouse, with significant practical value. However, anchor boxes are the mainstay of current ship detection algorithms based on optical remote sensing images. These algorithms have limited generalization capabilities, a high computational resource requirement, and a huge number of hyperparameters. Although natural image object detection algorithms have improved these issues by adopting anchor-free methods, they can only achieve horizontal box detection and are unable to handle the unique characteristics of ship targets, such as elongated shapes, varying angles, and tight arrangements. To address these issues, this paper designs an anchor-free, single-stage remote sensing image ship detection algorithm. In particular, based on CenterNet, this research suggests a distribution-prior based confidence coefficient prediction branch to produce higher quality positive samples for the ship detection job. More precise rotation angle representation is achieved by limiting the output space of angles using a hyperbolic activation-based angle prediction branch. The use of a variable positive-negative sample label assignment technique can speed up network convergence by providing dynamic, fine-tuned supervision information. Experiments on the HRSC2016 dataset validate the superiority of the proposed algorithm compared to other advanced algorithms and confirm the effectiveness of each module.
-

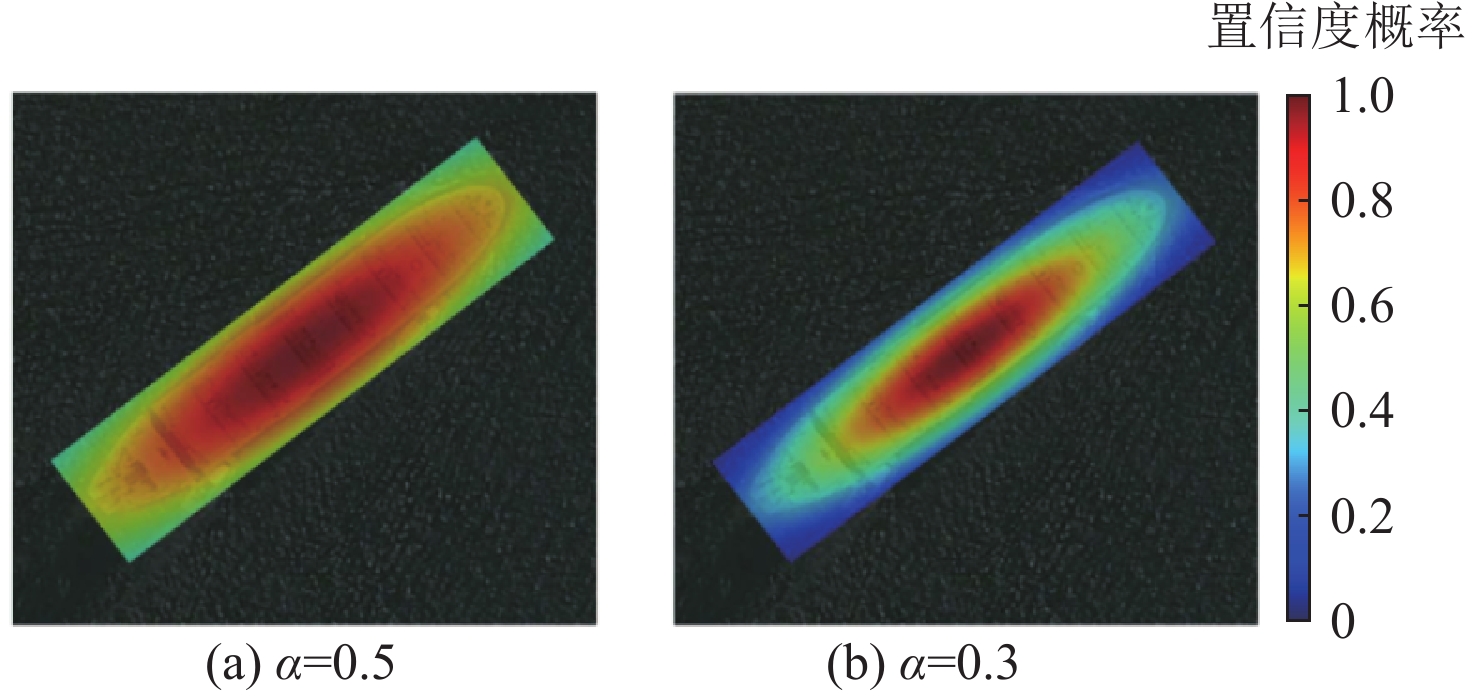
图 3 不同控制系数对置信度系数监督图的影响
Figure 3. Impact of different control coefficients on supervision map

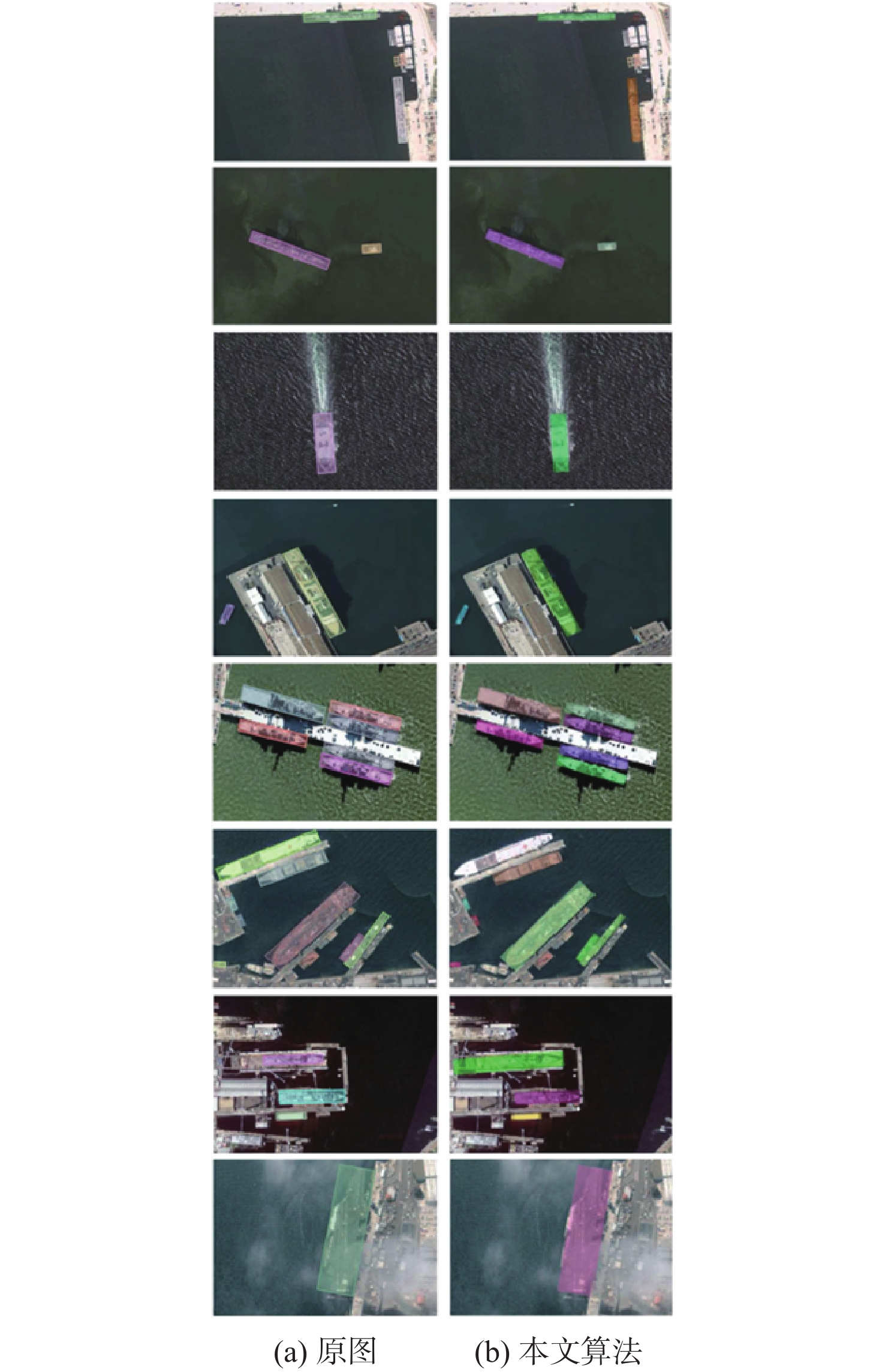
图 5 本文算法检测结果的可视化示例
Figure 5. Visual examples of detection results of the proposed algorithm
表 1 数据集信息
Table 1. Dataset statistics
来源 分辨率/m 图像长、
宽/像素训练集
样本数验证集
样本数测试集
样本数Google Earth 0.4~2 300~ 1500 1207 541 1228  下载: 导出CSV
下载: 导出CSV
表 2 与其他算法的对比
Table 2. Comparison results with other algorithms
算法 主干网络 是否数据增强 mAP/% R2CNN[15] ResNet101 否 73.1 RRPN[16] ResNet101 否 79.1 TOSO[17] ResNet101 是 79.3 RetinaNet-H[18] ResNet101 是 82.9 SARD[19] ResNet101 否 85.4 RoI-Trans[20] ResNet101 否 86.2 RSDet[21] ResNet152 否 86.5 Gliding Vertex[22] ResNet101 否 88.2 R3Det[23] ResNet152 是 89.3 FPN-CSL[24] ResNet152 是 89.6 本文算法 ResNet50 是 95.5
下载: 导出CSV
表 3 消融实验
Table 3. Ablation experiments
算法 AP/% AP50/% AP75/% APs/% APl/% 本文算法 70.5 95.5 87.3 59.2 73.1 无分布先验的置信度分支 69.5 95.3 84.0 56.9 71.4 无角度预测激活函数 69.0 94.5 83.4 57.4 70.5 无带权重的回归损失 68.3 94.4 82.3 56.7 70.1 无柔性正负标签分配 67.4 92.5 81.8 55.7 69.6
下载: 导出CSV
-
[1] 刘俊琦, 李智, 张学阳. 可见光遥感图像海面目标检测技术综述[J]. 计算机科学, 2020, 47(3): 116-123.LIU J Q, LI Z, ZHANG X Y. Review of maritime target detection in visible bands of optical remote sensing images[J]. Computer Science, 2020, 47(3): 116-123(in Chinese). [2] CHEN J Q, CHEN K Y, CHEN H, et al. A degraded reconstruction enhancement-based method for tiny ship detection in remote sensing images with a new large-scale dataset[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5625014. [3] ZOU Z X, CHEN K Y, SHI Z W, et al. Object detection in 20 years: a survey[J]. Proceedings of the IEEE, 2023, 111(3): 257-276. [4] LAW H, DENG J. CornerNet: detecting objects as paired keypoints[C]//Proceedings of the Computer Vision–ECCV 2018. Berlin: Springe, 2018: 765-781. [5] ZHOU X Y, WANG D Q, KRÄHENBÜHL P. Objects as points[EB/OL]. (2019-04-25)[2023-12-28]. https://arxiv.org/abs/1904.07850. [6] LIU Z K, HU J G, WENG L B, et al. Rotated region based CNN for ship detection[C]//Proceedings of the IEEE International Conference on Image Processing. Piscataway: IEEE Press, 2017: 900-904. [7] HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 770-778. [8] XIE S N, GIRSHICK R, DOLLÁR P, et al. Aggregated residual transformations for deep neural networks[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 5987-5995. [9] SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[EB/OL]. (2015-04-10)[2023-12-28]. https://arxiv.org/abs/1409.1556. [10] LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 936-944. [11] CHEN K Y, LIU C Y, CHEN H, et al. RSPrompter: learning to prompt for remote sensing instance segmentation based on visual foundation model[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 62: 1-17. [12] WU Y X, HE K M. Group normalization[EB/OL]. (2018-06-11)[2023-12-28]. https://arxiv.org/abs/1409.1556.https://arxiv.org/abs/1803.08494. [13] LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: common objects in context[EB/OL]. (2015-02-21)[2023-12-29]. https://arxiv.org/abs/1405.0312. [14] LOSHCHILOV I, HUTTER F. Decoupled weight decay regularization[EB/OL]. (2019-01-04)[2023-12-29]. https://arxiv.org/abs/1711.05101. [15] JIANG Y Y, ZHU X Y, WANG X B, et al. R2CNN: rotational region CNN for orientation robust scene text detection[EB/OL]. (2017-06-30)[2023-12-29]. https://arxiv.org/abs/1706.09579. [16] MA J Q, SHAO W Y, YE H, et al. Arbitrary-oriented scene text detection via rotation proposals[J]. IEEE Transactions on Multimedia, 2018, 20(11): 3111-3122. [17] FENG P M, LIN Y T, GUAN J, et al. TOSO: student’s-T distribution aided one-stage orientation target detection in remote sensing images[C]//Proceedings of the ICASSP 2020-IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway: IEEE Press, 2020: 4057-4061. [18] LI Z G, YUAN Y, MA D D. One-stage detector from coarse to fine for rotating object of remote sensing[C]//Proceedings of the IEEE International Geoscience and Remote Sensing Symposium IGARSS. Piscataway: IEEE Press, 2021: 5307-5310. [19] WANG Y S, ZHANG Y, ZHANG Y, et al. SARD: towards scale-aware rotated object detection in aerial imagery[J]. IEEE Access, 2019, 7: 173855-173865. [20] DING J, XUE N, LONG Y, et al. Learning RoI transformer for oriented object detection in aerial images[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2019: 2844-2853. [21] QIAN W, YANG X, PENG S L, et al. Learning modulated loss for rotated object detection[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(3): 2458-2466. [22] XU Y C, FU M T, WANG Q M, et al. Gliding vertex on the horizontal bounding box for multi-oriented object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(4): 1452-1459. [23] YANG X, YAN J C, FENG Z M, et al. R3Det: refined single-stage detector with feature refinement for rotating object[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(4): 3163-3171. [24] YANG X, YAN J C. Arbitrary-oriented object detection with circular smooth label[EB/OL]. (2022-03-23)[2023-12-29]. https://arxiv.org/abs/2003.05597v1. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 441
- HTML全文浏览量: 176
- PDF下载量: 147
- 被引次数: 0
