



Geomagnetic perception navigation orientation method based on adaptive circular path search
-
摘要:
水下自主无人潜航器(AUV)在海洋探索、军事领域上发挥着巨大的作用。针对水下自主无人潜航器在无先验信息情况下的导航问题,提出一种圆弧状路径搜索的地磁感知导航定向方法。该方法建立载体的地磁感知导航模型,将导航过程转化为多目标优化问题;载体以圆弧状路径,感知路径空间中目标函数的变化趋势,从而确定目标方向;该方法自适应选择不同的搜索间隔以适应不同搜索阶段,从而实现自主无人潜航器的导航定向任务。通过仿真实验分析,结果表明:所提方法能够使水下自主无人潜航器在无先验数据地磁图的情况下到达预设目标地点,通过与其他搜索算法对比,验证了所提方法的有效性与高效性。
Abstract:In both military defense and ocean exploration, autonomous underwater vehicle (AUV) are crucial. To address the navigation issue of underwater autonomous unmanned submersibles in the absence of prior information, a geo-sensory navigation orientation method based on circular arc path search is proposed. By initially creating a geo-sensory navigation model for the car, this technique turns navigation into a multi-objective optimization problem. Secondly, the vehicle follows a circular arc path and perceives the variation trend of the objective function in the path space to determine the target direction. Furthermore, the method achieves the navigation orientation job of autonomous unmanned submersibles by adaptively choosing alternative search intervals to accommodate varied search stages. It is shown through simulated studies that this approach can make it possible for underwater autonomous unmanned submersibles to arrive at the predefined destination area without the need for previous magnetic field maps. By comparing with other search algorithms, the validity and efficiency of the proposed algorithm are validated.
-
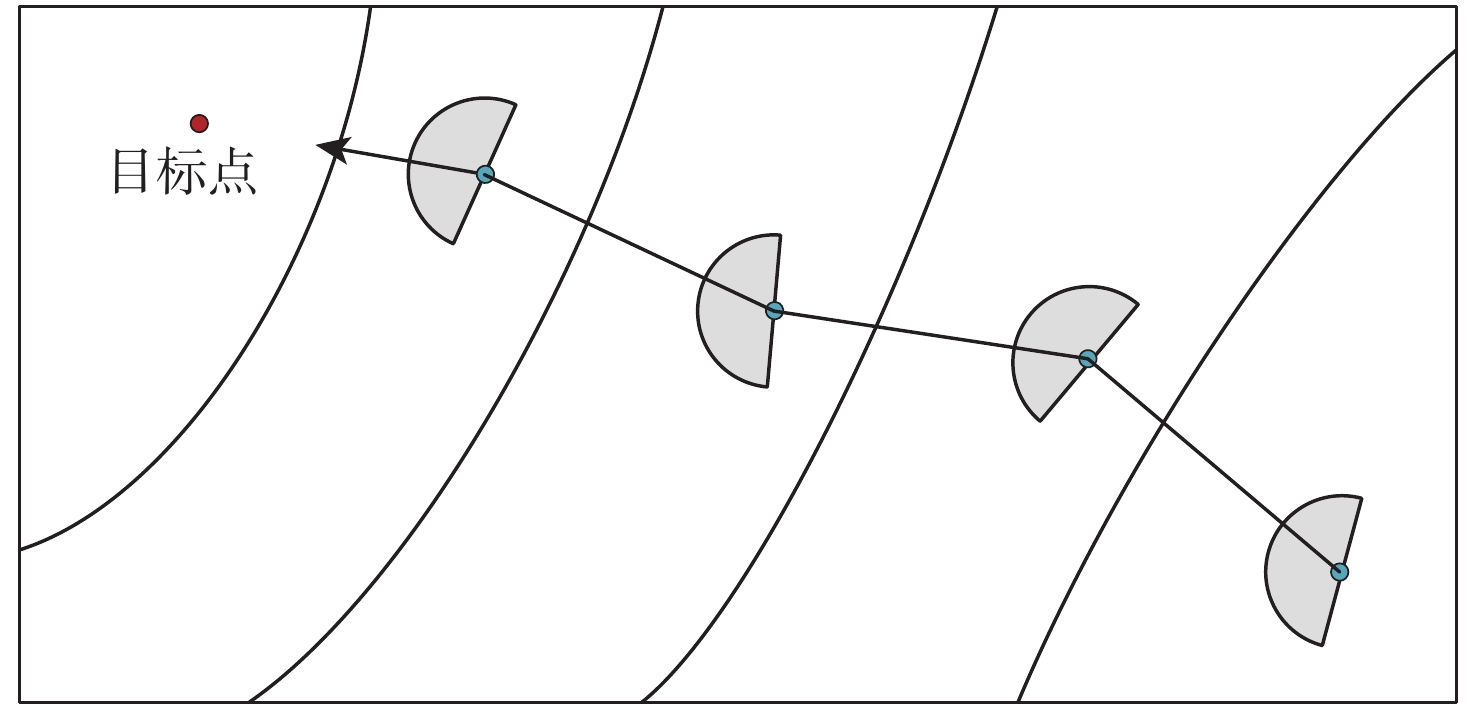
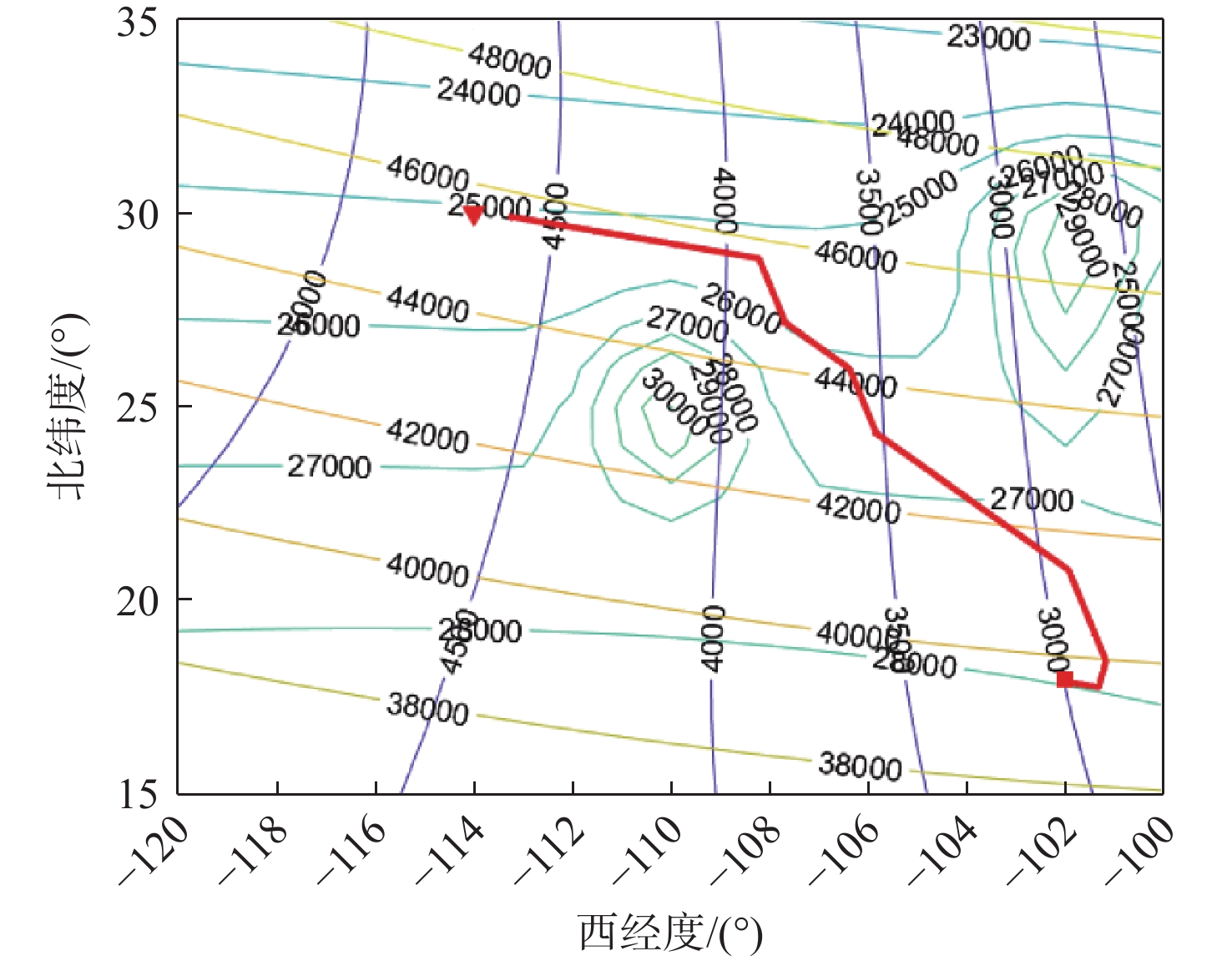
图 4 地磁感知导航过程示意图
Figure 4. Schematic figure of geomagnetic perception navigation process
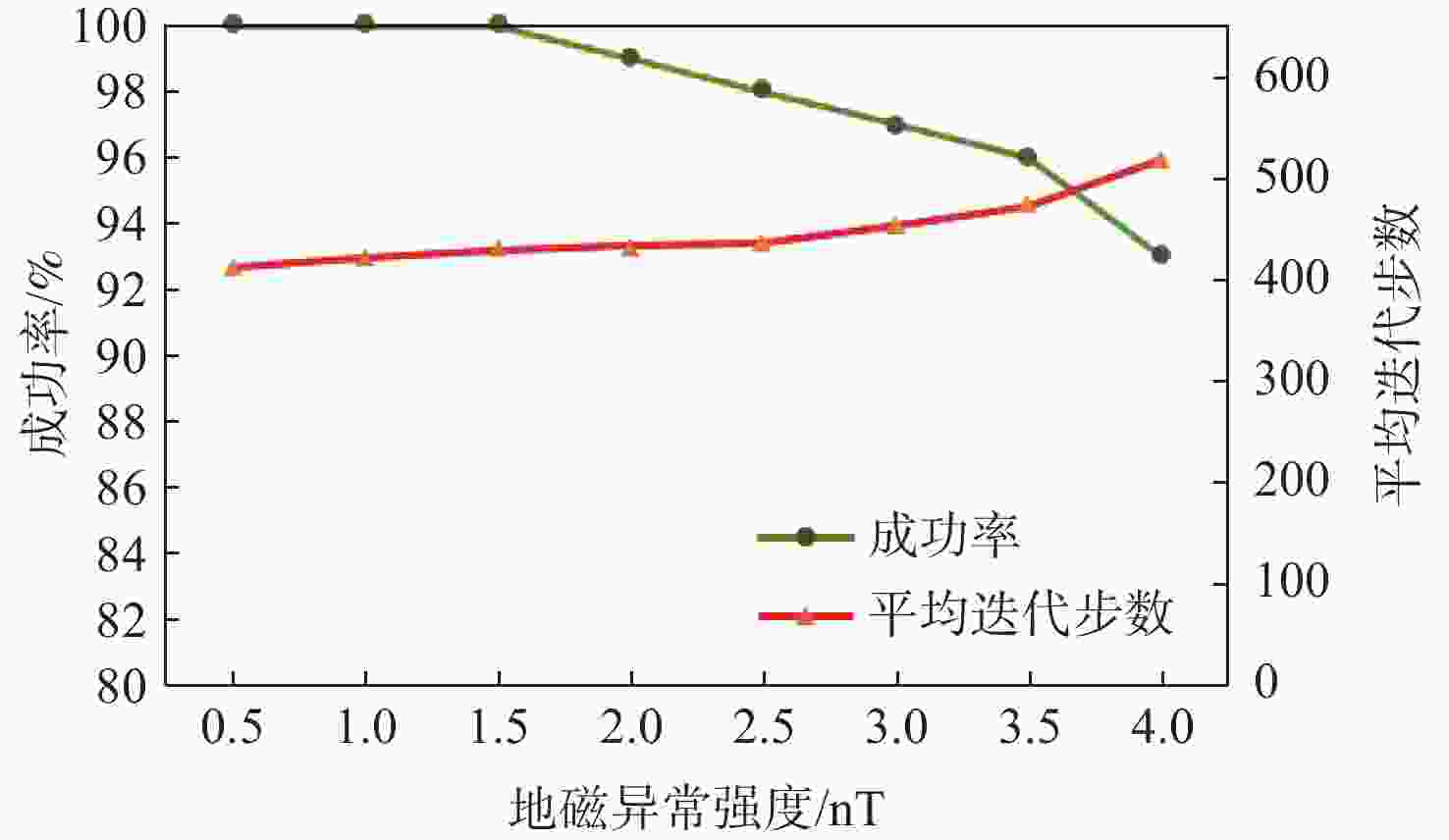
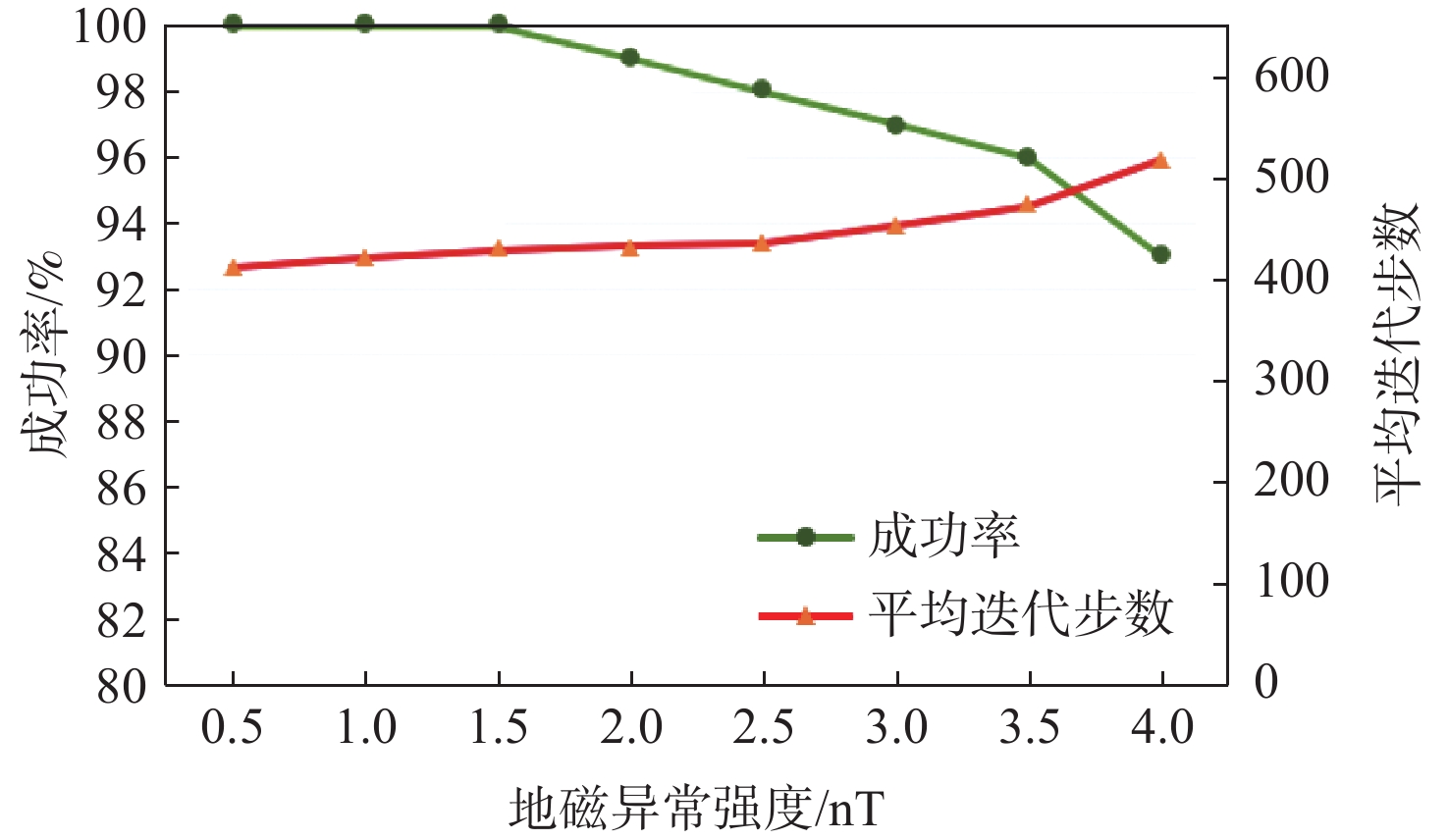
图 9 本文方法的成功率与平均迭代数
Figure 9. Success rate and average iterations number of the proposed method
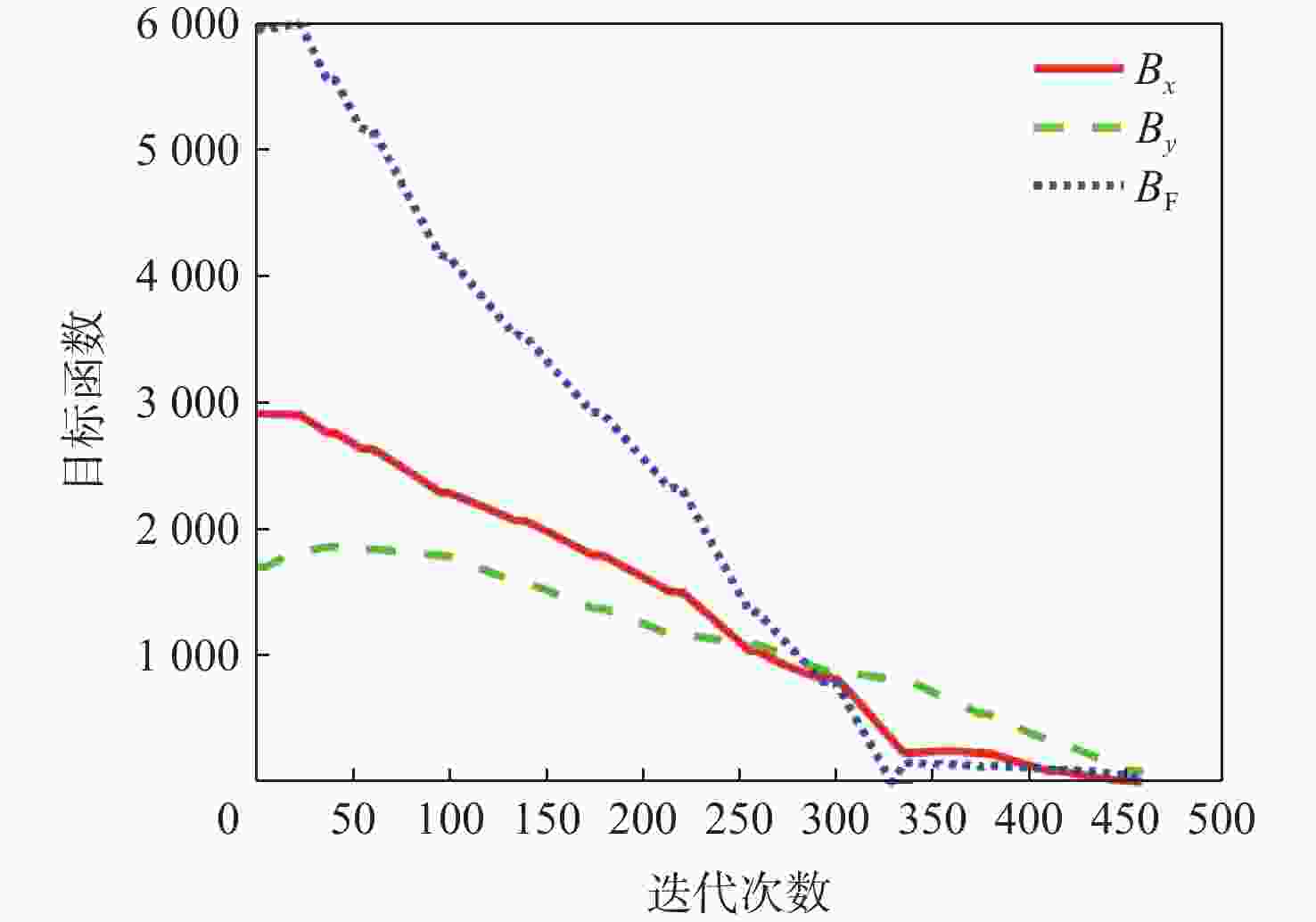
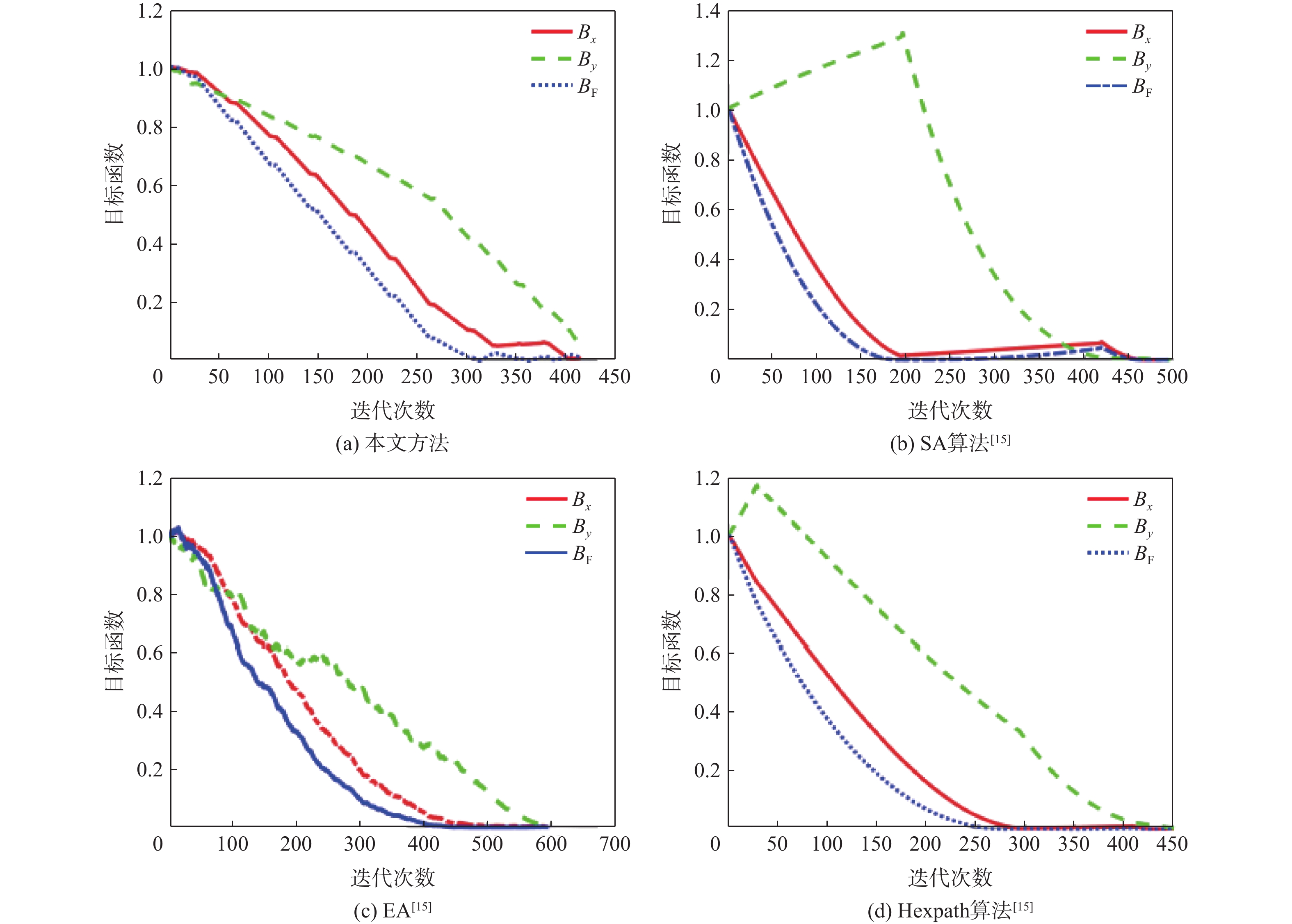
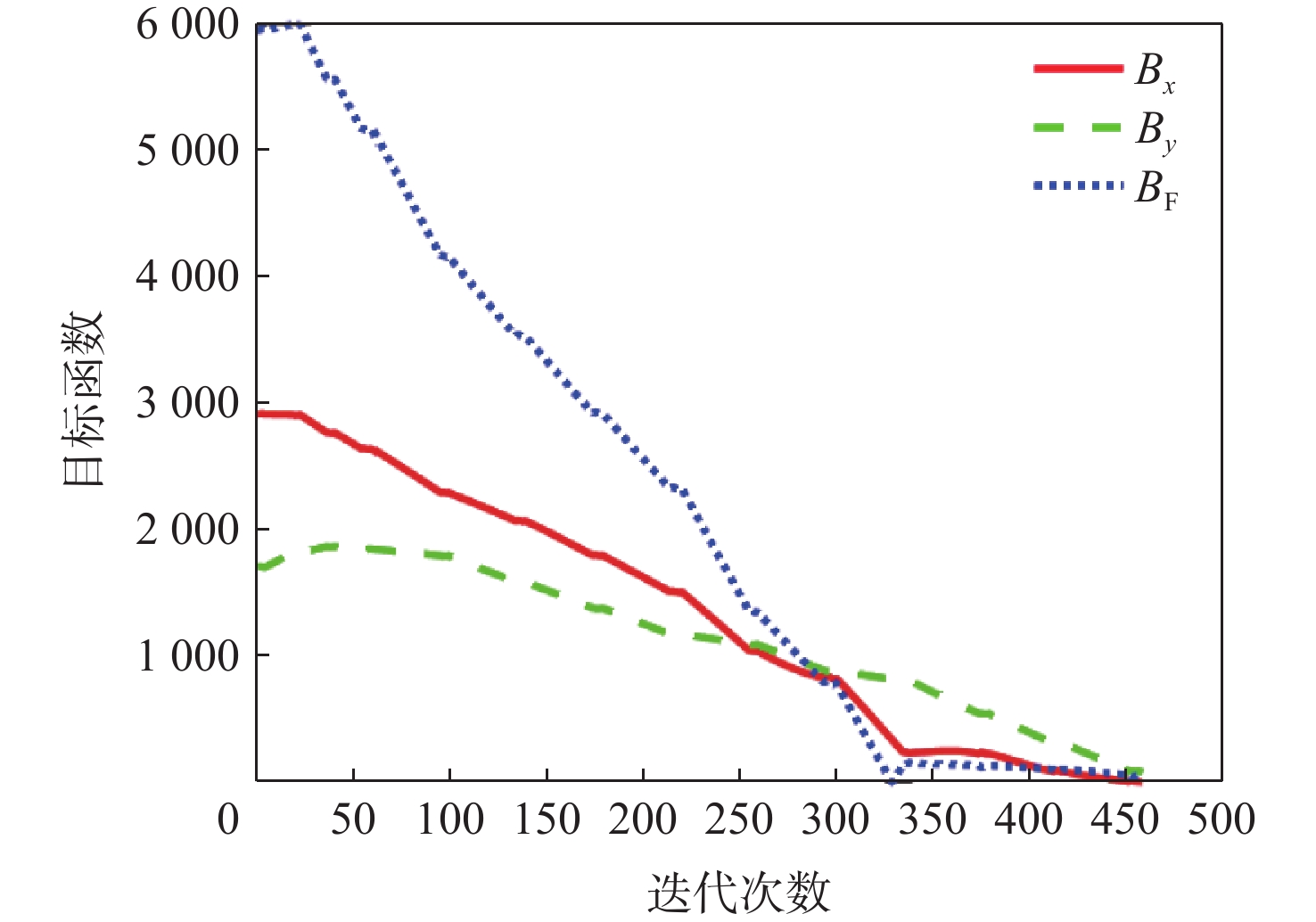
图 11 本文方法地磁分量收敛图
Figure 11. Convergence figure of geomagnetic components of the proposed method
表 1 实验结果
Table 1. Experimental results
$ {\alpha }_{1} $ $ {\alpha }_{2} $ $ {\alpha }_{3} $ 平均步数 5 33 10 429 5 35 10 433 5 30 10 435 10 33 10 426 12 33 10 425 15 33 10 428 12 33 20 412 12 33 22 410 12 33 25 432  下载: 导出CSV
下载: 导出CSV
表 2 实验参数
Table 2. Material parameters of experimental article
$ \varepsilon $ $ {\xi }_{1} $ $ {\xi }_{2} $ $ j $ $ v $ $ {\alpha }_{1} $ $ {\alpha }_{2} $ $ {\alpha }_{3} $ 0.001 0.1 0.95 6 0.05 12 33 22
下载: 导出CSV
-
[1] 宋保维, 潘光, 张立川, 等. 自主水下航行器发展趋势及关键技术[J]. 中国舰船研究, 2022, 17(5): 27-44.SONG B W, PAN G, ZHANG L C, et al. Development trend and key technologies of autonomous underwater vehicles[J]. Chinese Journal of Ship Research, 2022, 17(5): 27-44(in Chinese). [2] 万晓云, 吴云龙, 郭恒洋, 等. 基于重力场产品的水下匹配导航发展现状及影响因素分析[J]. 武汉大学学报(信息科学版), 2023, 48(6): 879-890.WAN X Y, WU Y L, GUO H Y, et al. Development status and influencing factor analysis of underwater matching navigation based on gravity field products[J]. Geomatics and Information Science of Wuhan University, 2023, 48(6): 879-890(in Chinese). [3] 张涛, 夏茂栋, 张佳宇, 等. 水下导航定位技术综述[J]. 全球定位系统, 2022, 47(4): 1-16.ZHANG T, XIA M D, ZHANG J Y, et al. Review of underwater navigation and positioning technology[J]. GNSS World of China, 2022, 47(4): 1-16(in Chinese). [4] 张小跃, 杨功流, 张春熹. 捷联惯导/里程计组合导航方法[J]. 北京航空航天大学学报, 2013, 39(7): 922-926.ZHANG X Y, YANG G L, ZHANG C X. Integrated navigation method for SINS and odometer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(7): 922-926(in Chinese). [5] 赵曦, 赵建虎. 水下地形匹配导航现状及发展趋势[J]. 哈尔滨工程大学学报, 2023, 44(11): 1927-1936.ZHAO X, ZHAO J H. Current progress and development trend of underwater terrain-matching navigation[J]. Journal of Harbin Engineering University, 2023, 44(11): 1927-1936(in Chinese). [6] 马腾, 李晔, 赵玉新, 等. AUV的图优化海底地形同步定位与建图方法[J]. 导航定位与授时, 2020, 7(2): 42-49.MA T, LI Y, ZHAO Y X, et al. AUV bathymetric simultaneous localization and mapping based on graph optimization method[J]. Navigation Positioning and Timing, 2020, 7(2): 42-49(in Chinese). [7] 李明, 何继玮, 王一蕾, 等. 基于重力场数据的水下无源导航[C]//第三届无人系统高峰论坛论文集. 南京: [ s. n. ] , 2023: 1-7.LI M, HE J W, WANG Y L, et al. Underwater passive navigation based on gravity field data[C]//Proceedings of the 3rd Unmanned Systems Summit Forum. Nanjing: [ s. n. ], 2023: 1-7(in Chinese). [8] BOBROV D S. Development of methods and means for creating navigational gravity maps[D]. Mendeleevo: All-russian Scientific Research Institute of Physical-Technical and Radio Engineering Measurements, 2020. [9] WANG W X, LI S X, GUO C. Particle swarm optimization in geomagnetic matching navigation[C]//Proceedings of the International Conference on Computers, Information Processing and Advanced Education. Piscataway: IEEE Press, 2022: 450-453. [10] PANG Y, ZHOU Z, PAN X, et al. An INS/geomagnetic integrated navigation method for coarse estimation of positioning error and search area adaption applied to high-speed aircraft[J]. IEEE Sensors Journal, 2023, 23(7): 7766-7775. [11] QUINTAS J, CRUZ J, PASCOAL A, et al. A comparison of nonlinear filters for underwater geomagnetic navigation[C]//Proceedings of the IEEE/OES Autonomous Underwater Vehicles Symposium. Piscataway: IEEE Press, 2020: 1-6. [12] ZHANG Y D, LIU X F, LUO M Z, et al. Bio-inspired approach for long-range underwater navigation using model predictive control[J]. IEEE Transactions on Cybernetics, 2021, 51(8): 4286-4297. [13] ZHOU Y Q, NIU Y, LIU M Y. Bionic geomagnetic navigation method for AUV based on differential evolution algorithm[C]//Proceedings of the OCEANS 2022, Hampton Roads. Piscataway: IEEE Press, 2022: 1-5. [14] LI H, QU J S, JIANG X K, et al. A correlation analysis of geomagnetic field characteristics in geomagnetic perceiving navigation[J]. Frontiers in Neurorobotics, 2021, 15: 785563. [15] 李红. 基于优化搜索的地磁仿生导航及其在AUV中的应用研究[D]. 西安: 西北工业大学, 2018.LI H. Geomagnetic bionic navigation based on optimized search and its application in AUV[D]. Xi’an: Northwestern Polytechnical University, 2018(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 258
- HTML全文浏览量: 76
- PDF下载量: 14
- 被引次数: 0
