



Light-weight BiLSTM-based data association algorithm between echoes and tracks for multi-radar multi-target tracking
-
摘要:
针对密集杂波环境下多源雷达多目标跟踪容易出现数据关联错误、精细化建模数据关联算法计算量大的问题,提出一种基于轻量化双向长短期记忆(BiLSTM)网络的多源雷达多目标跟踪点航数据关联算法。构造杂波环境下雷达回波与目标航迹之间的多源雷达关联事件矩阵;基于多源雷达点迹与多目标航迹量测预测,借助最小最大标准化处理,设计归一化的距离特征张量;以归一化的距离特征张量为输入、以关联事件矩阵为输出,建立基于轻量化BiLSTM的多源雷达多目标点迹/航迹数据关联网络模型。针对每个目标航迹,以每个雷达输出的最大概率对应的雷达点迹作为关联量测,利用卡尔曼滤波实现航迹更新。密集杂波环境下多雷达协同跟踪多目标仿真结果表明:所提算法在关联准确率与跟踪精度方面与集中式联合概率数据关联滤波结果基本一致,明显优于概率数据关联滤波、最近邻数据关联滤波、基于全连接层的点航关联滤波算法和基于长短期记忆(LSTM)网络的点航关联滤波算法;但平均运行时间明显小于联合概率数据关联滤波,与最近邻数据关联滤波几乎一致。
Abstract:This paper proposes a data-driven algorithm, i.e., a light-weight bi-directional long short-term memory (BiLSTM) network-based intelligent data association between echoes and tracks for multi-radar multi-target tracking, in light of the issue that data association is prone to error and that exact modeling-based algorithms have enormous computational costs for multi-radar multi-target tracking in dense clutter environments. The first step is to build the multi-radar association matrix, whose constituent is the association result between target tracks and radar echoes. Based on multi-radar echoes and predicted measurements, the distance tensor is designed based on max-min normalization. The light-weight BiLSTM networks-based multi-radar multi-target data association network is put forward, by taking the above normalized distance tensor and multi-radar association matrix as the input and output. And the measurement corresponding to the maximum probability is treated as the associated one to update every track through implementing a Kalman filter for each radar. The simulation results of multi-radar tracking multi-target in dense clutter environment show that the association accuracy and tracking precision of the proposed algorithm are similar with those of the centralized joint probability data association filter, which are much better than those of probability data association filter, nearest neighbor data association filter, fully connected layer-based data association filter and long short-term memory (LSTM) networks-based data association filter. Furthermore, compared to the centralized joint probability data association filter, which is nearly equal to the nearest neighbor data association filter, the proposed algrithm’s average running time is significantly shorter.
-
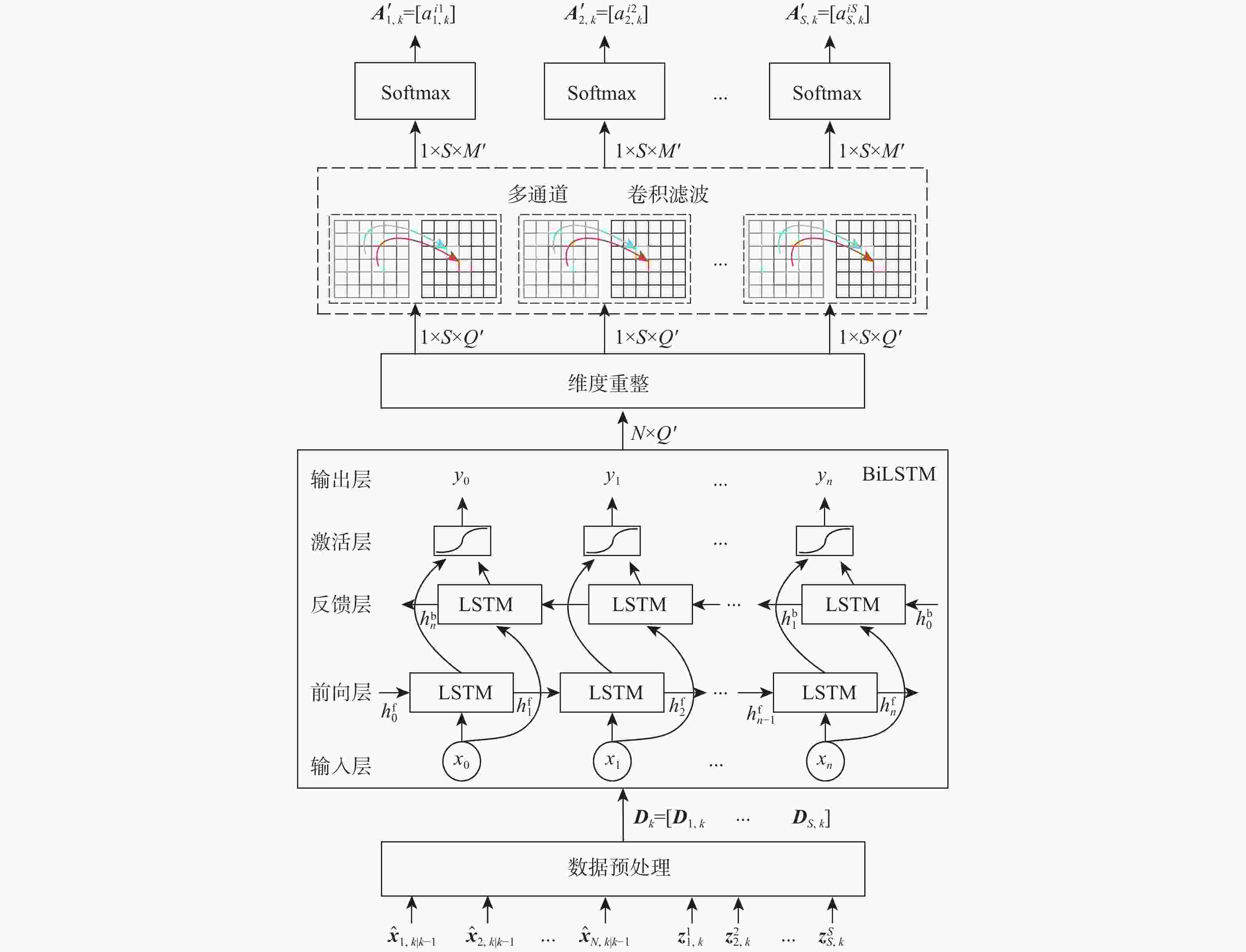
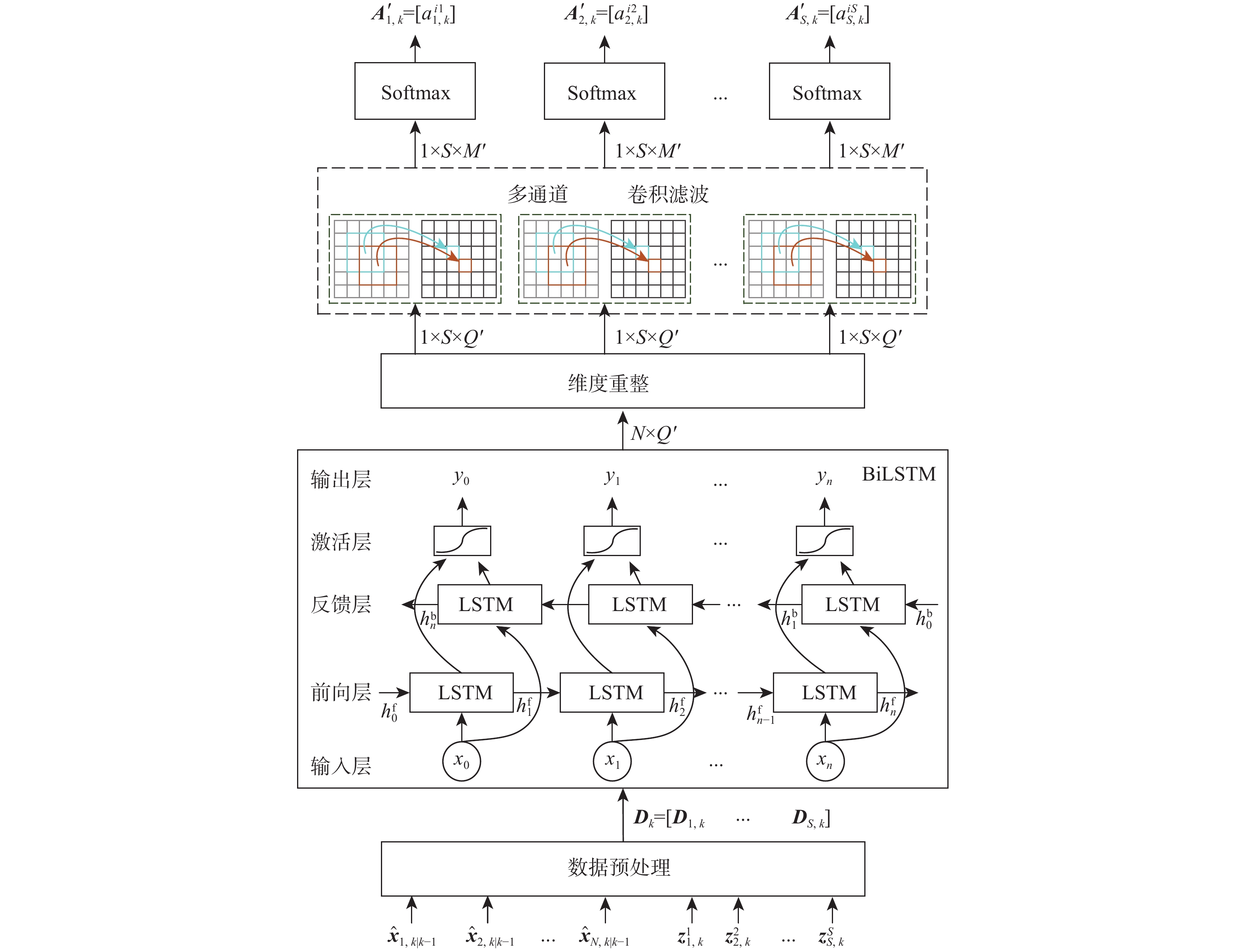
图 1 基于轻量化BiLSTM的多源雷达多目标点航关联
Figure 1. Light-weight BiLSTM-based data association between multiple echoes and multiple tracks for multiple radars tracking multiple targets
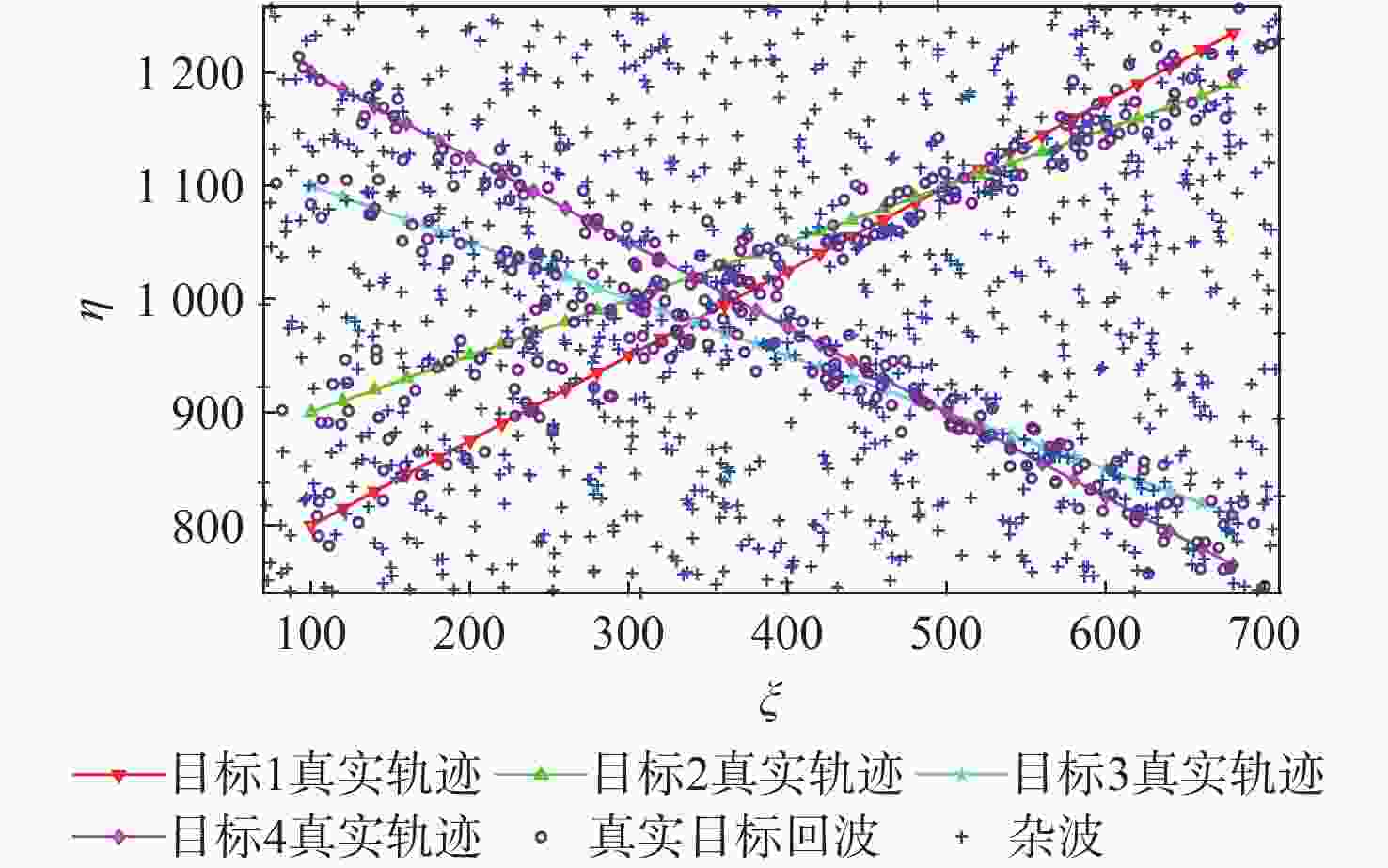
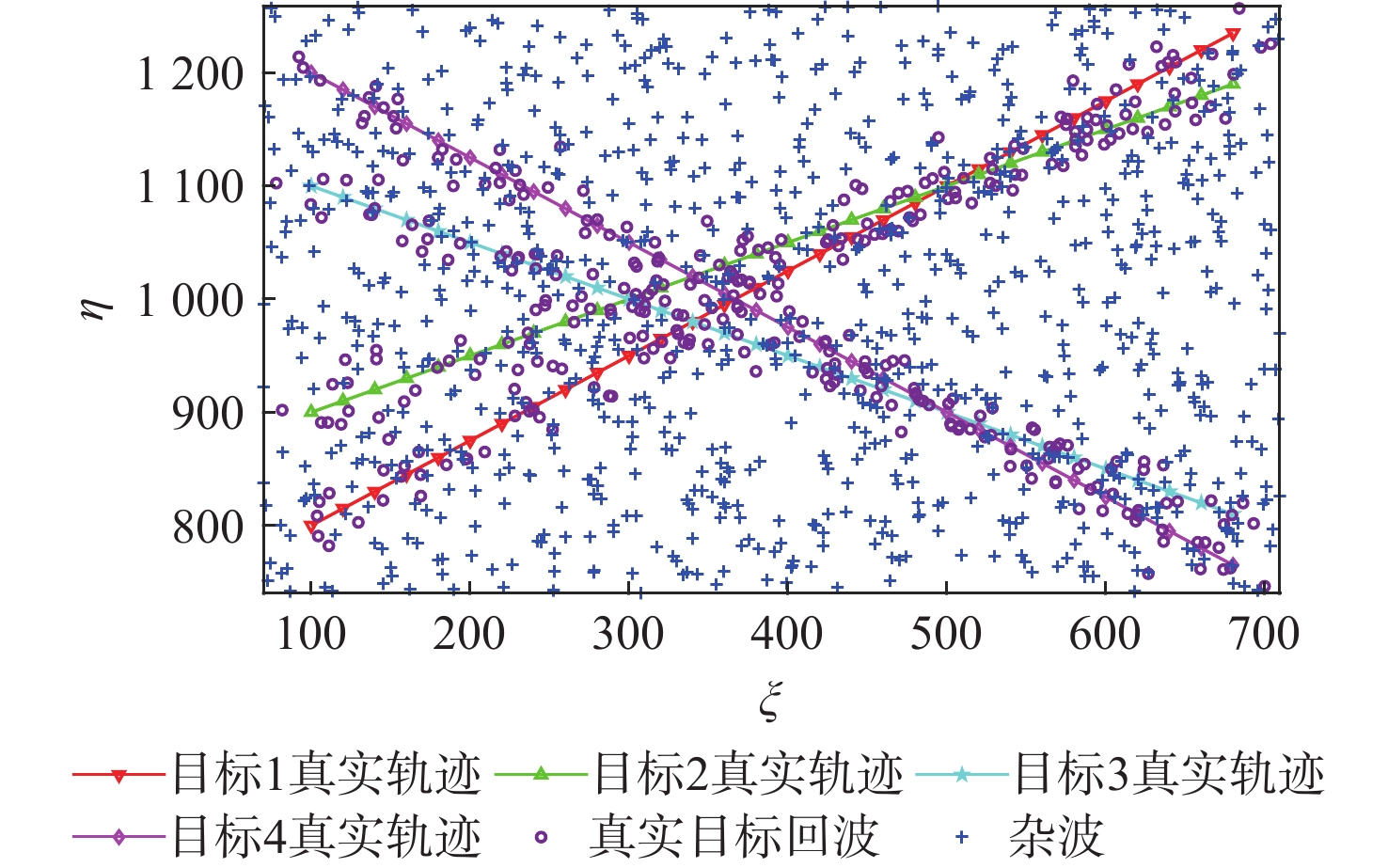
图 2 密集杂波环境下多目标轨迹与多源雷达点迹示意图
Figure 2. Illustration of multiple target trajectories and echoes from multiple radars in dense clutter environment
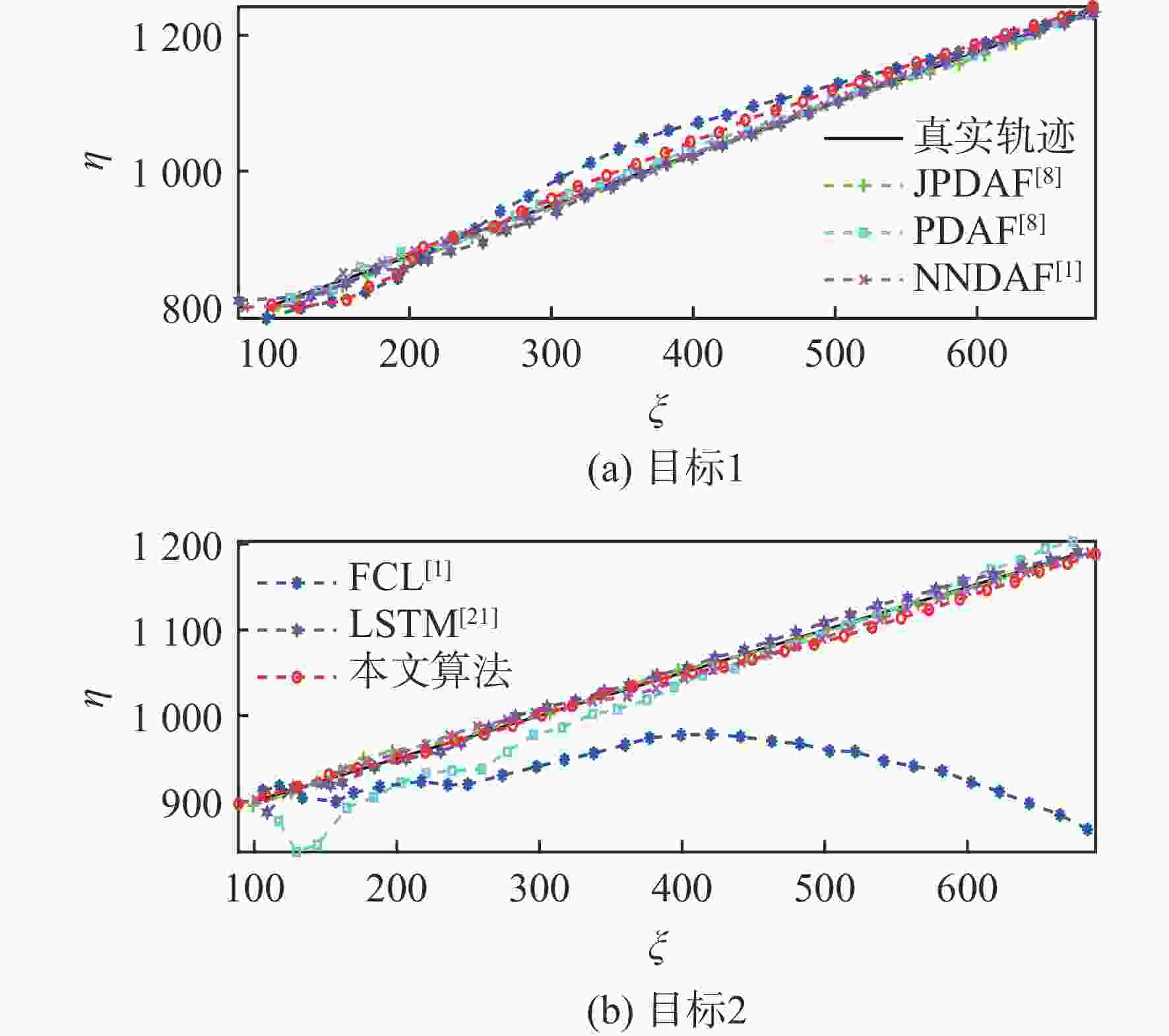
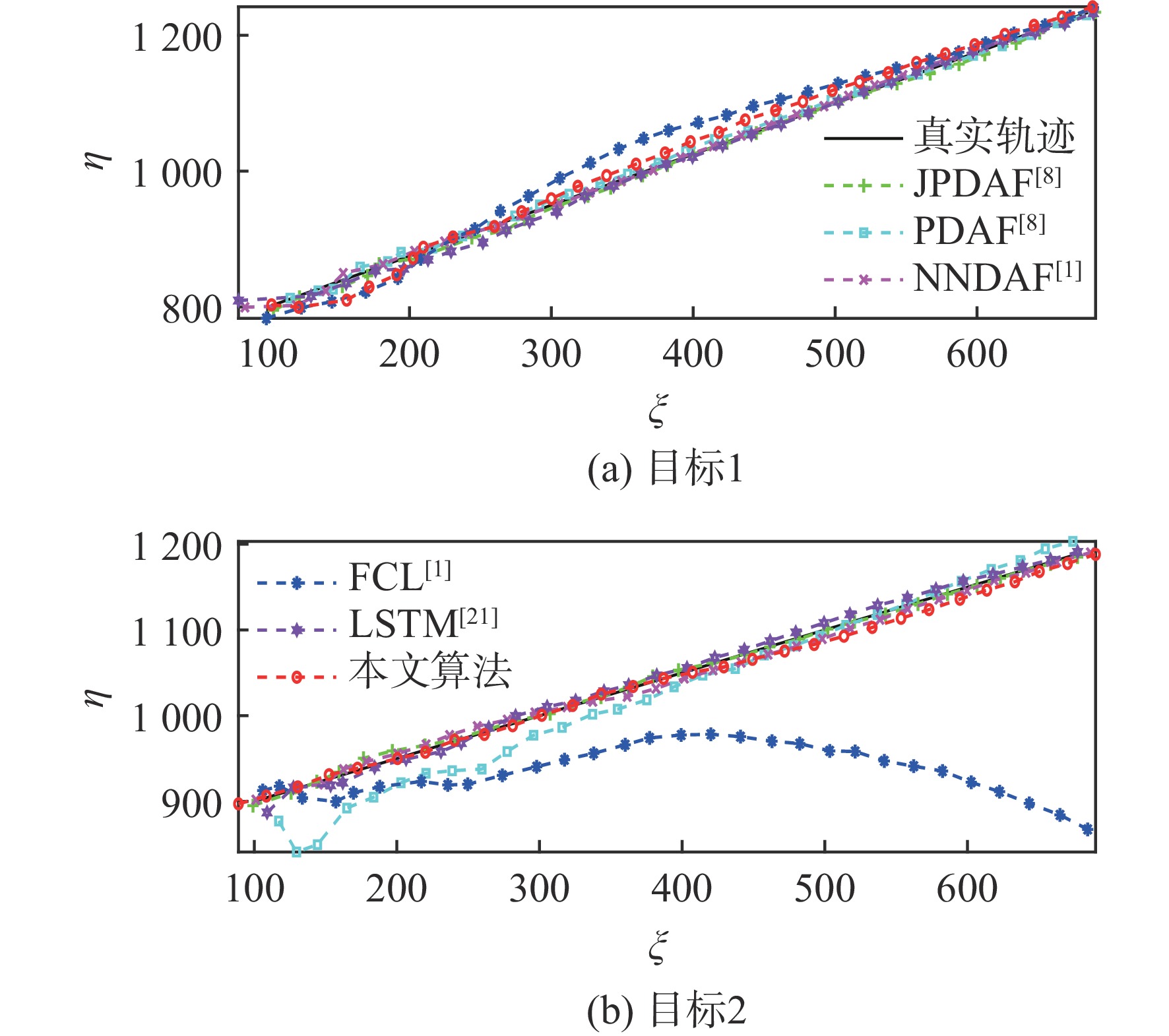
图 3 单次测试下目标1和目标2真实轨迹与跟踪航迹对比
Figure 3. Comparison between true trajectories and estimated tracks of targets 1 and 2 in a single testing scenario
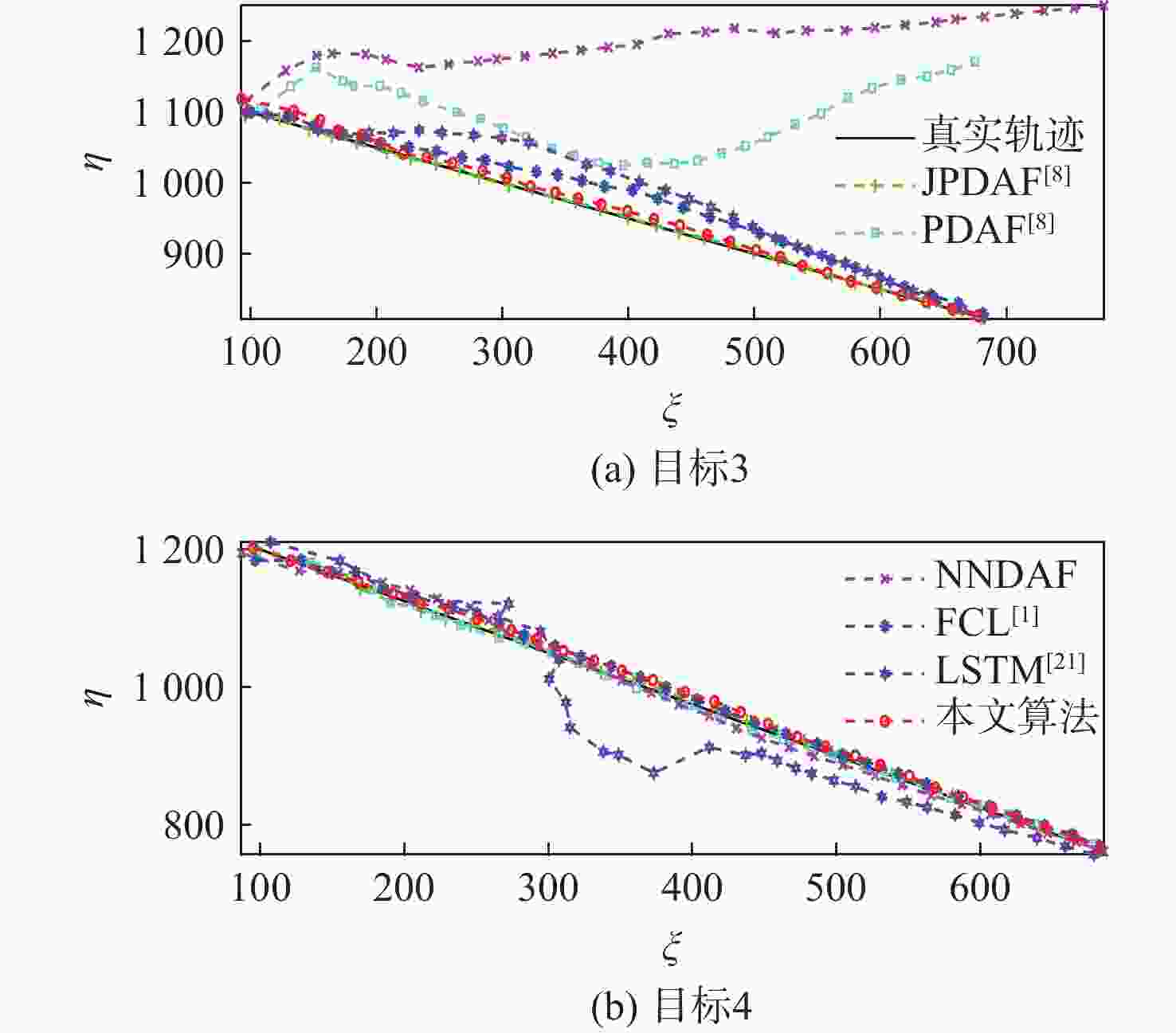
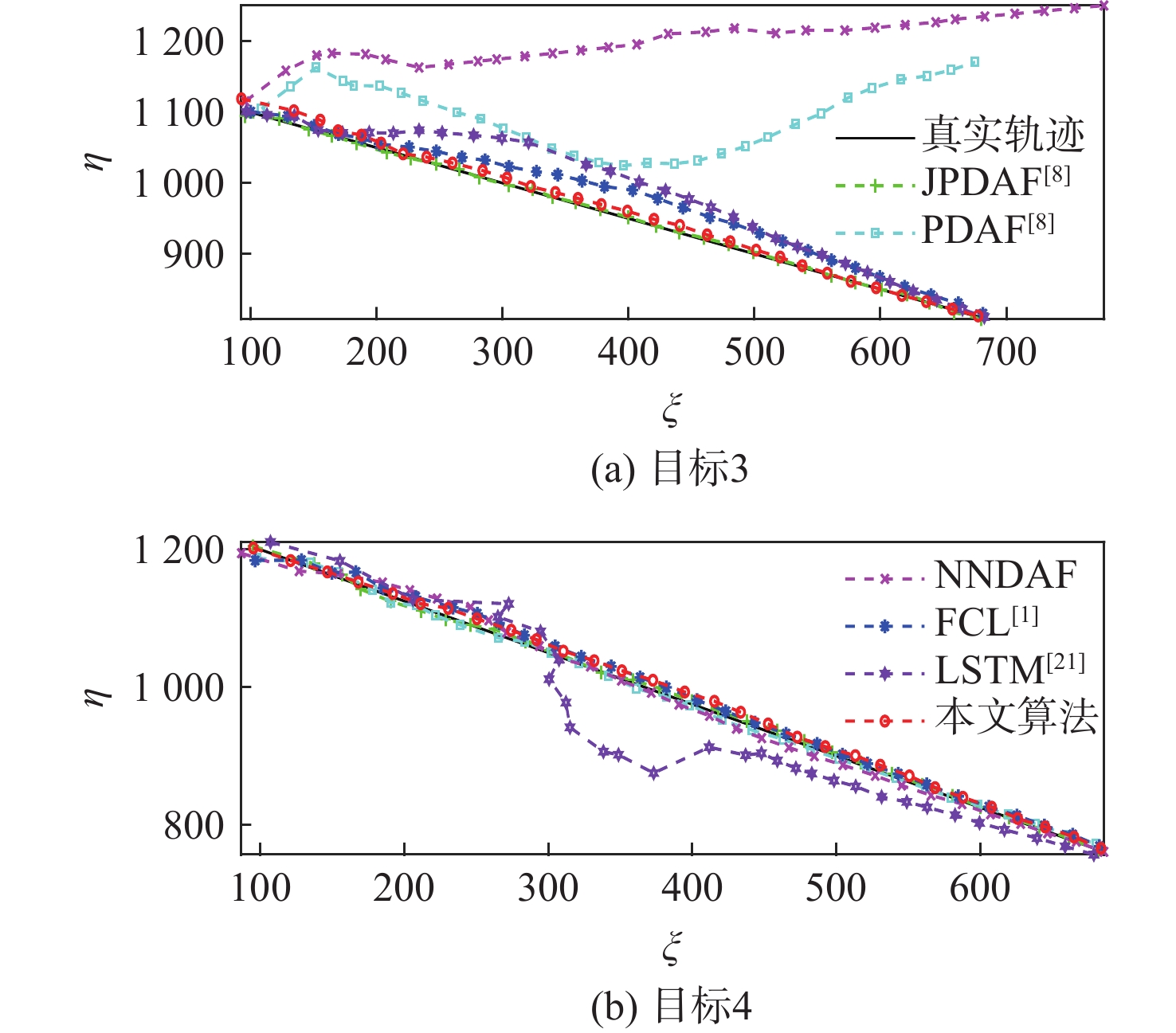
图 4 单次测试下目标3和目标4真实轨迹与跟踪航迹对比
Figure 4. Comparison between true trajectories and estimated tracks of targets 3 and 4 in a single testing scenario
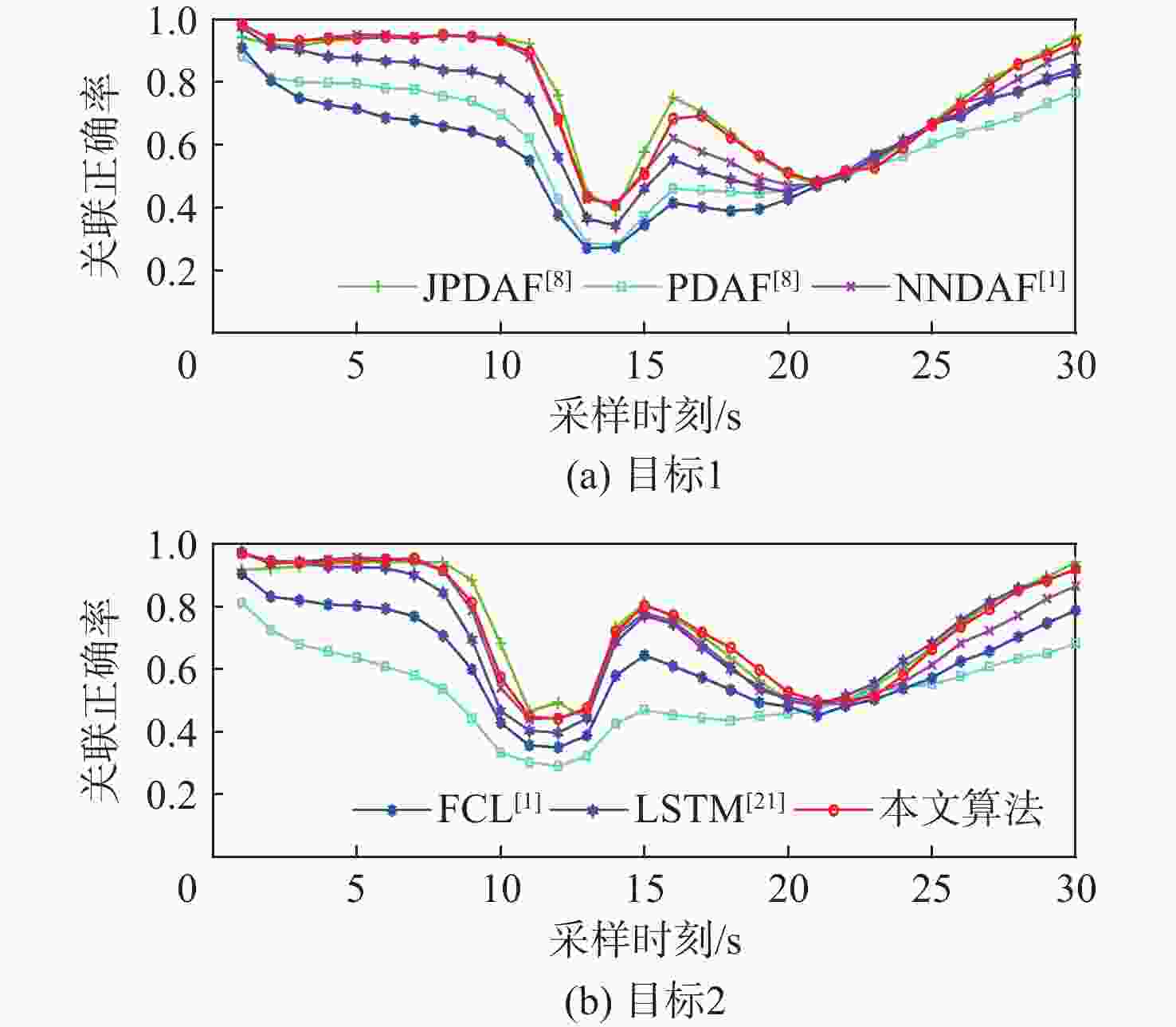
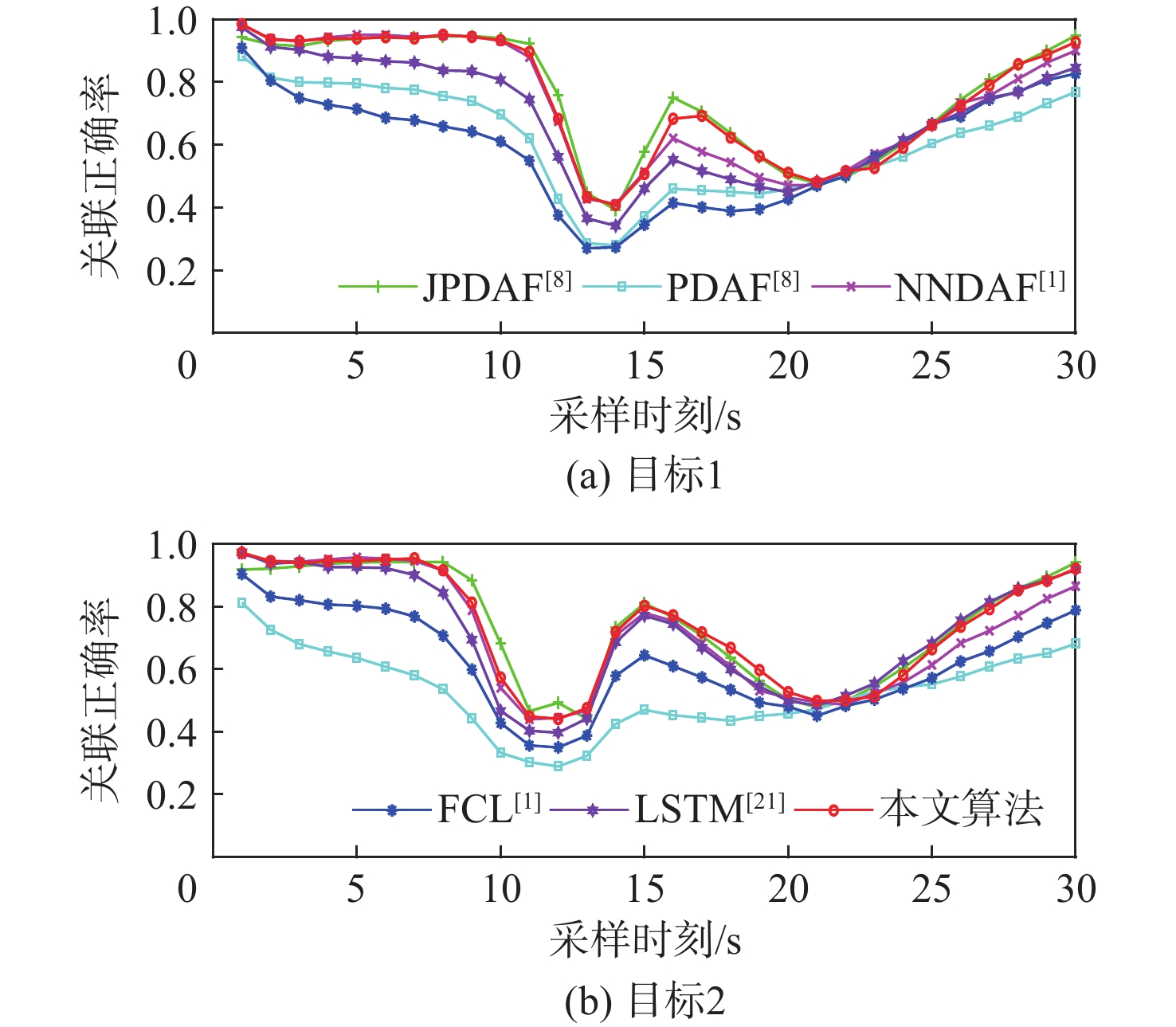
图 5 测试场景下目标1和目标2的关联正确率
Figure 5. Association accuracies of targets 1 and 2 in the testing scenario
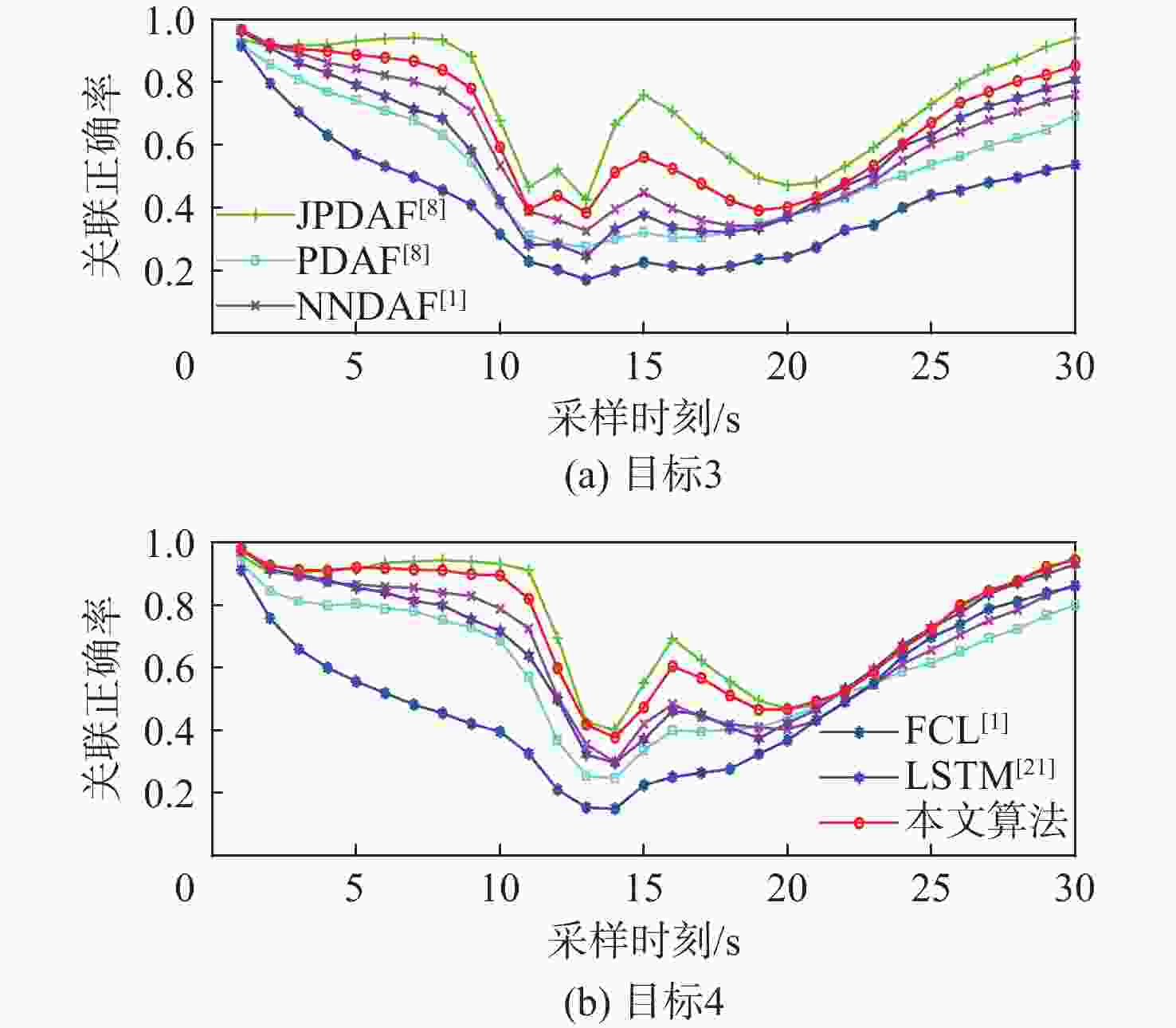
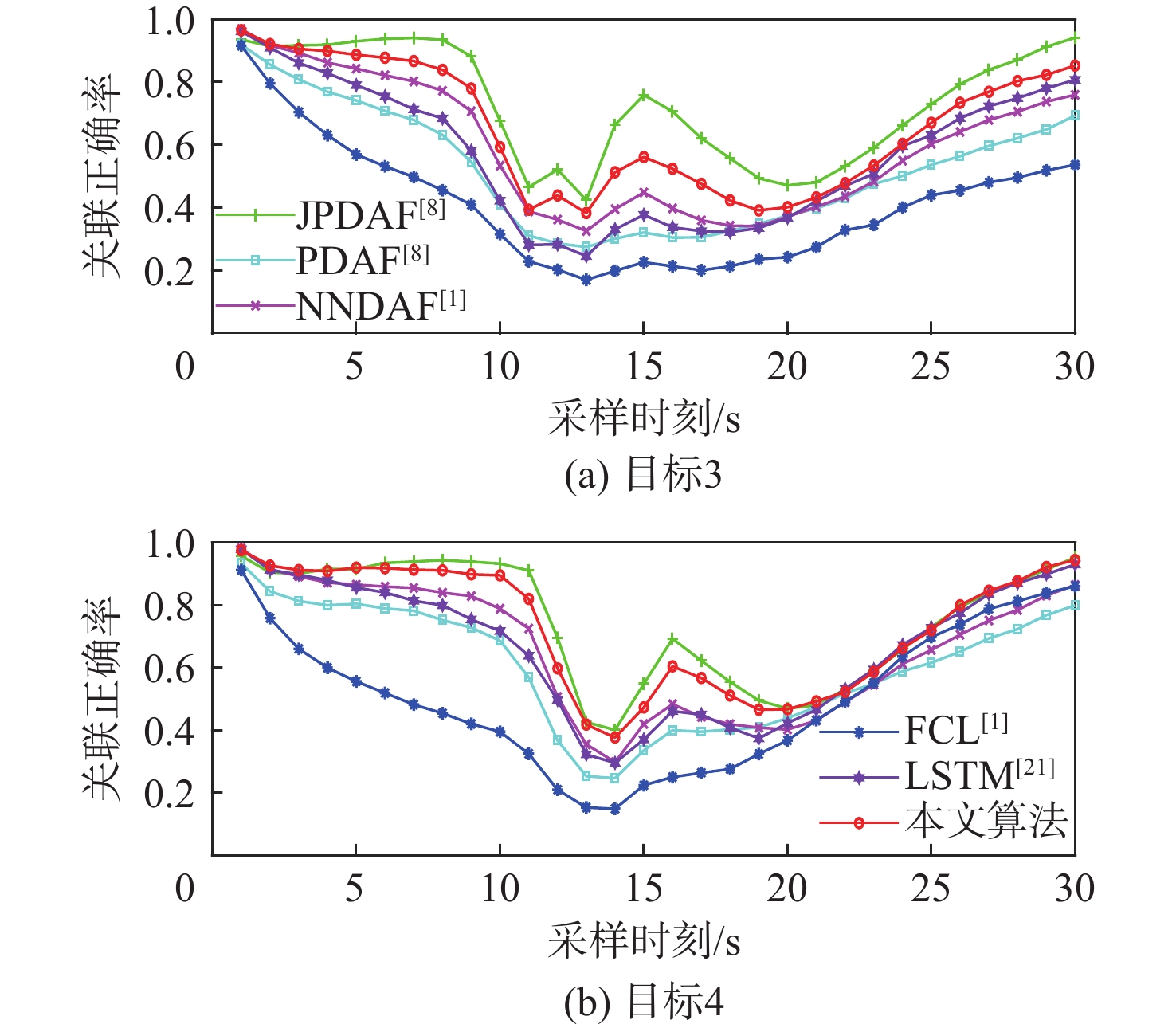
图 6 测试场景下目标3和目标4的关联正确率
Figure 6. Association accuracies of targets 3 and 4 in the testing scenario
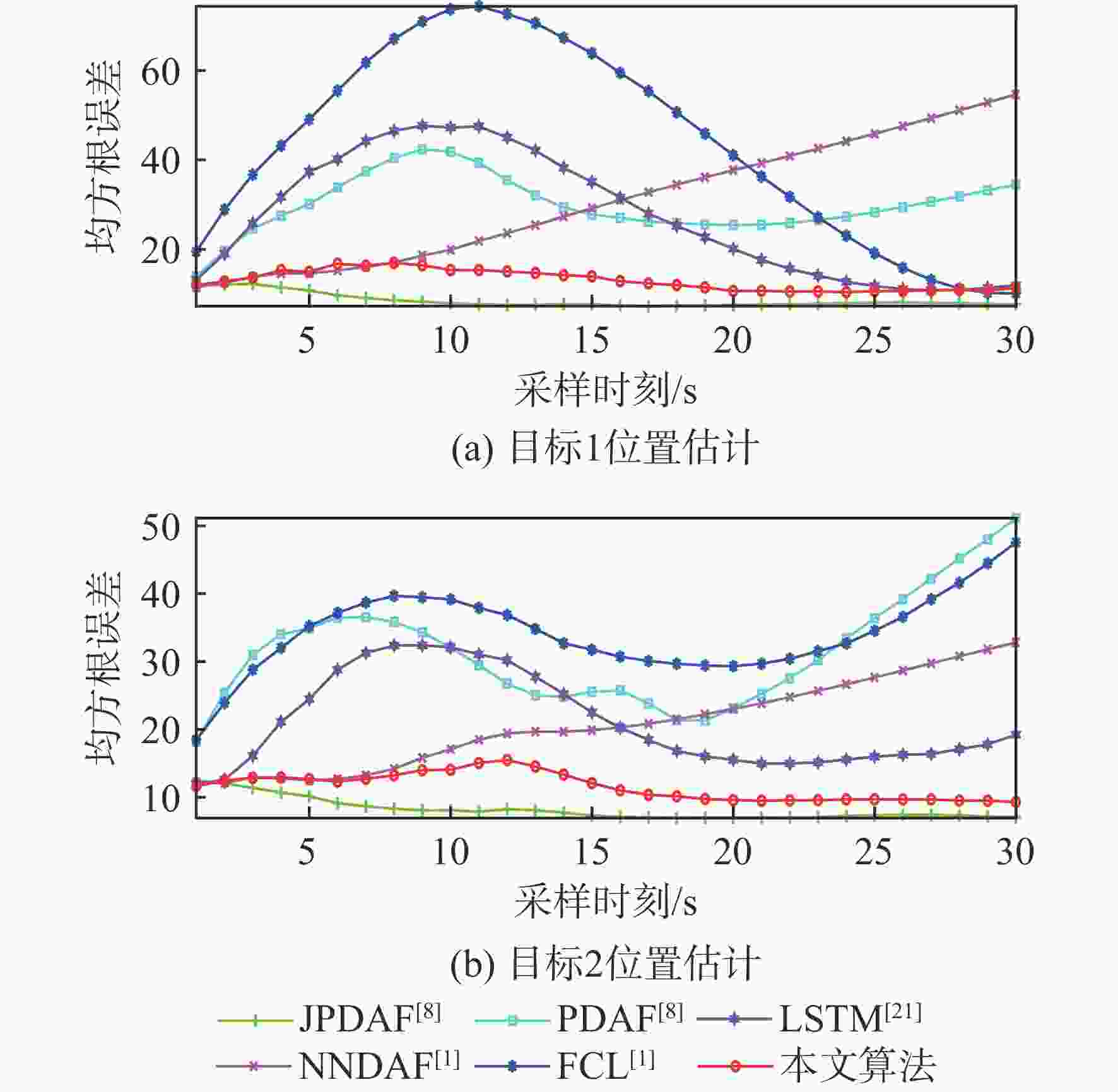
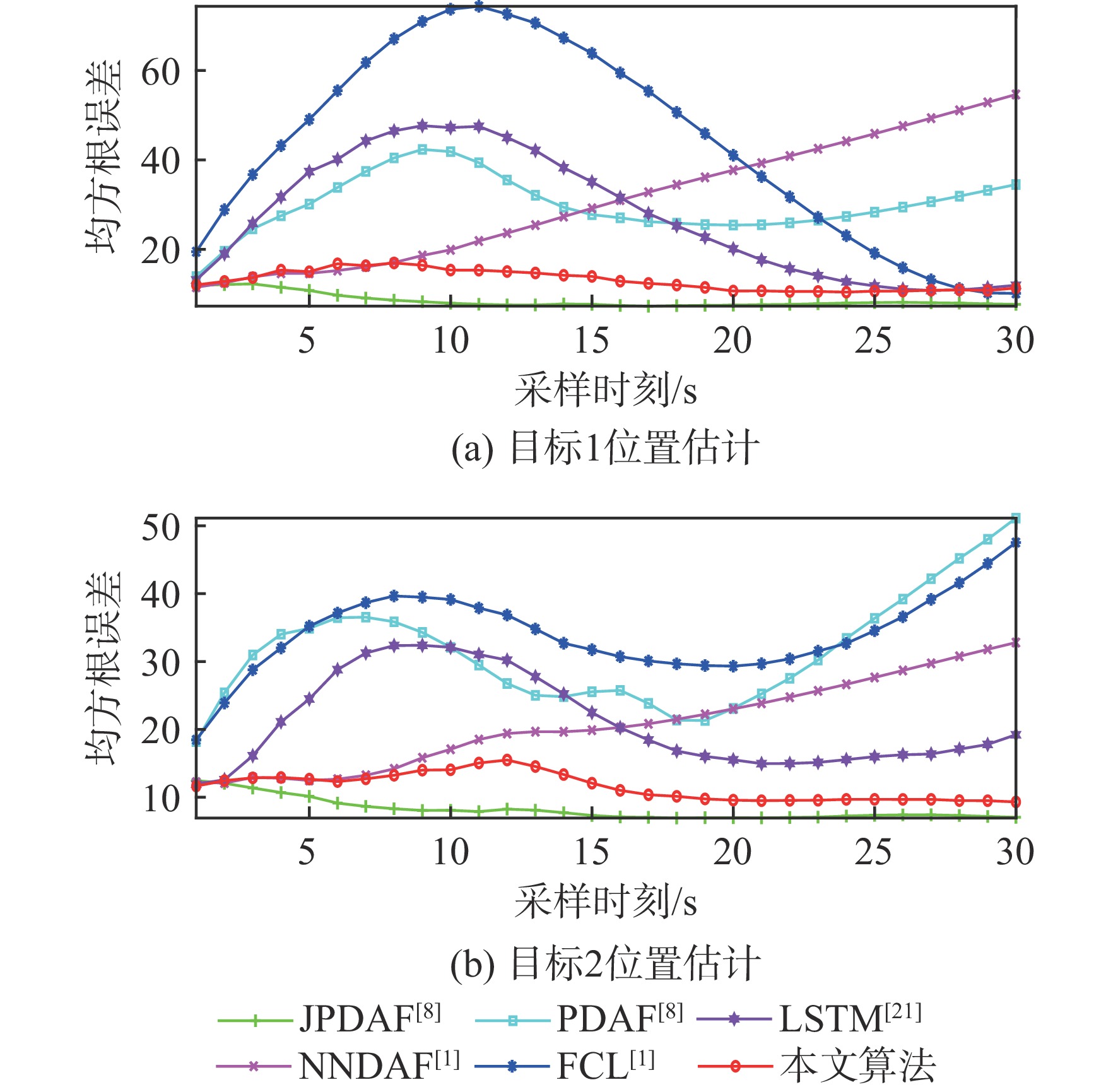
图 7 测试场景下目标1和目标2的位置估计均方根误差
Figure 7. Root mean square errors of estimated positions of targets 1 and 2 in the testing scenario
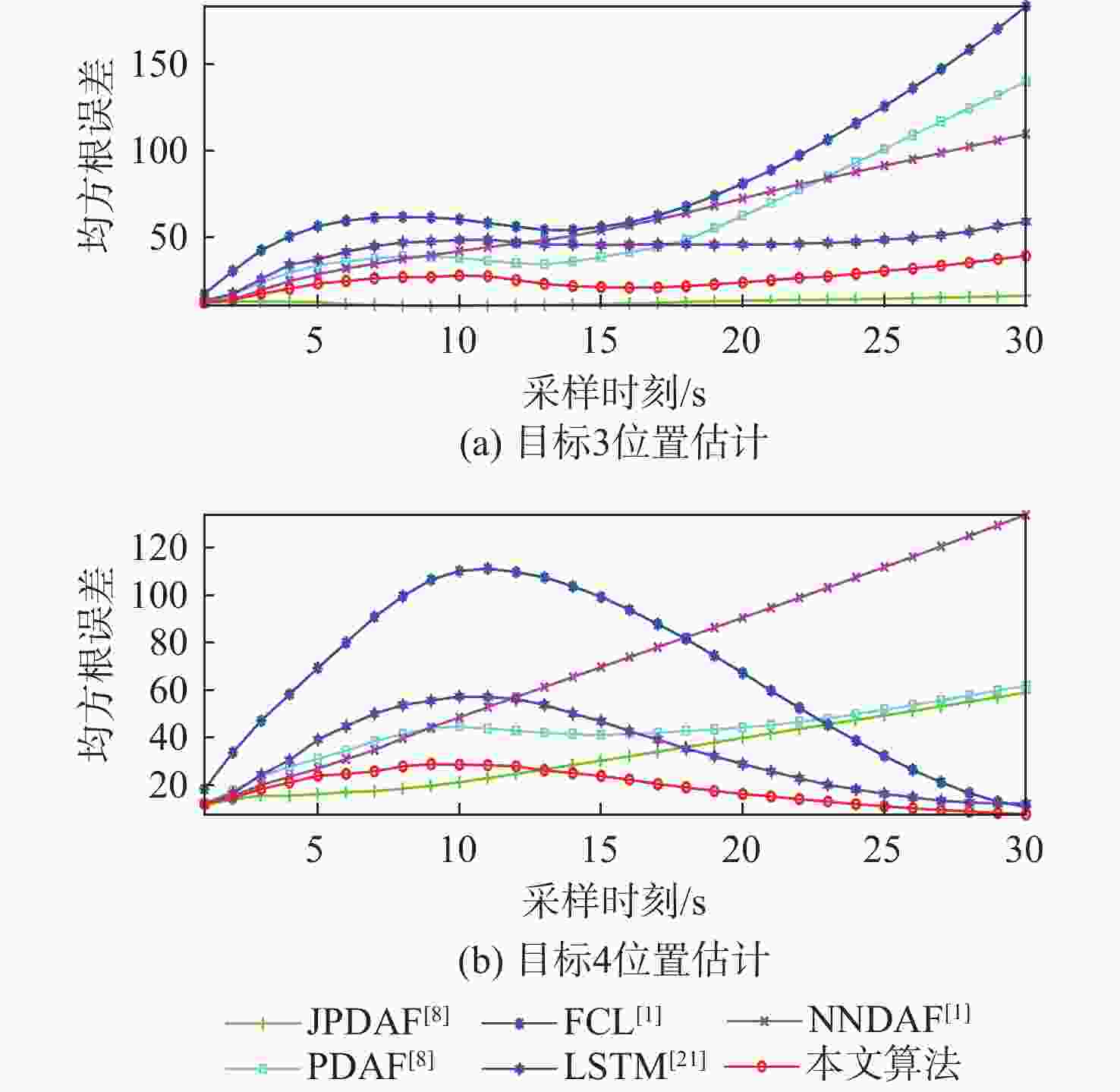
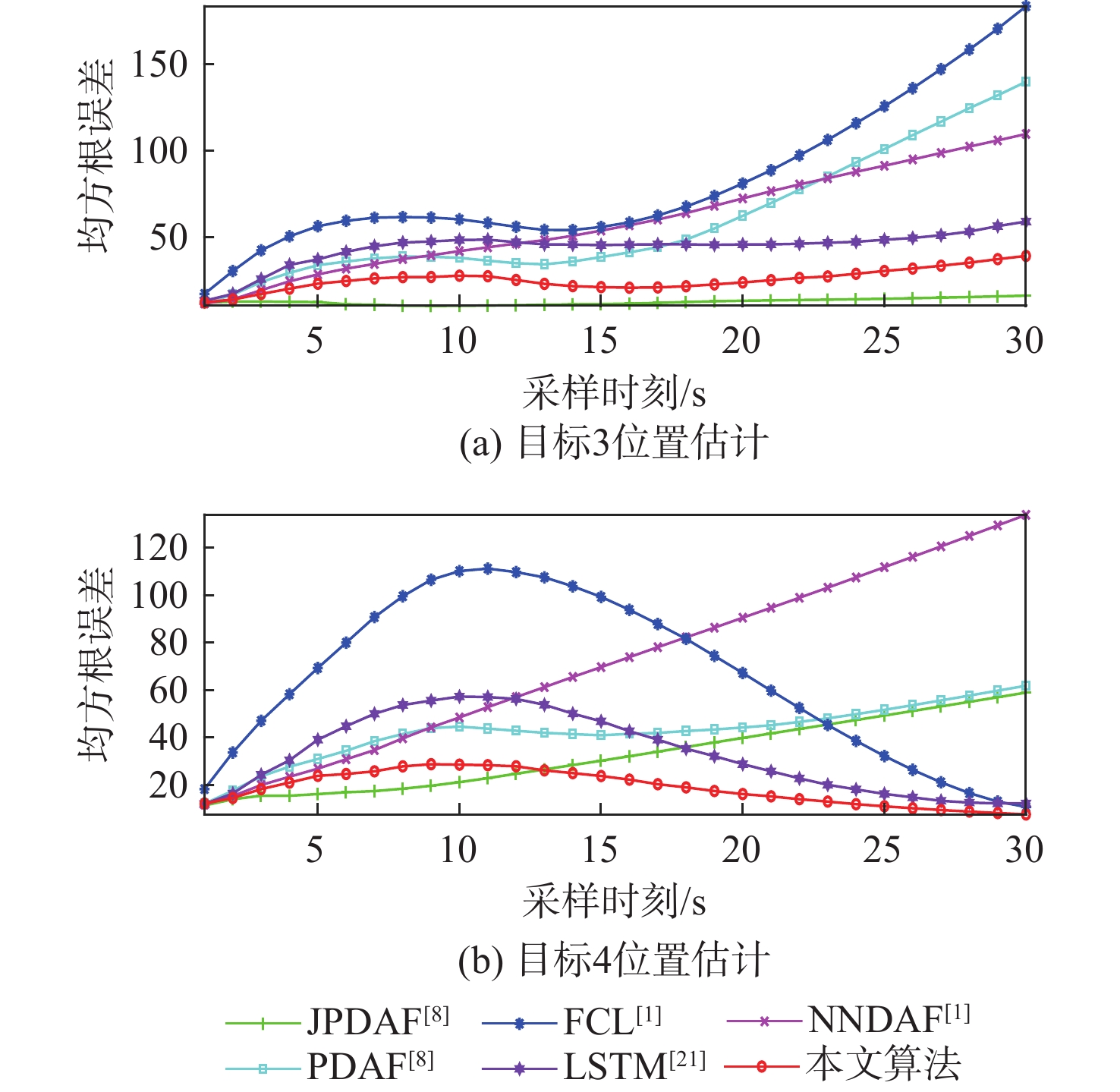
图 8 测试场景下目标3和目标4的位置估计均方根误差
Figure 8. Root mean square errors of estimated positions of targets 3 and 4 in the testing scenario
-
[1] 何友, 修建娟, 刘瑜, 等. 雷达数据处理及应用[M]. 4版. 北京: 电子工业出版社, 2022.HE Y, XIU J J, LIU Y, et al. Radar data processing with applications[M]. 4th ed. Beijing: Publishing House of Electronics Industry, 2022(in Chinese). [2] 韩崇昭, 朱洪艳, 段战胜. 多源信息融合[M]. 3版. 北京: 清华大学出版社, 2022.HAN C Z, ZHU H Y, DUAN Z S. Multisource information fusion[M]. 3rd ed. Beijing: Tsinghua University Press, 2022(in Chinese). [3] 罗亚伦, 廖育荣, 李兆铭, 等. 高超目标强跟踪CKF自适应交互多模型跟踪算法[J]. 北京航空航天大学学报, 2024, 50(7): 2272-2283.LUO Y L, LIAO Y R, LI Z M, et al. Strong tracking CKF adaptive interactive multiple model tracking algorithm based on hypersonic target[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(7): 2272-2283(in Chinese). [4] 胡浩然, 陈树新, 吴昊, 等. 基于变分贝叶斯的连续-离散最大相关熵CKF算法[J]. 北京航空航天大学学报, 2023, 49(10): 2859-2866.HU H R, CHEN S X, WU H, et al. Continuous-discrete maximum correntropy CKF algorithm based on variational Bayes[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(10): 2859-2866(in Chinese). [5] 宋丽萍, 陈德峰, 田甜, 等. 基于雷达测距和测速的GEO目标实时关联算法[J]. 北京航空航天大学学报, 2023, 49(8): 2167-2175.SONG L P, CHEN D F, TIAN T, et al. A real-time correlation algorithm for GEO targets based on radar ranging and velocity measurement[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(8): 2167-2175(in Chinese). [6] 曾雅俊, 王俊, 魏少明, 等. 分布式多传感器多目标跟踪方法综述[J]. 雷达学报, 2023, 12(1): 197-213.ZENG Y J, WANG J, WEI S M, et al. Review of the method for distributed multi-sensor multi-target tracking[J]. Journal of Radars, 2023, 12(1): 197-213(in Chinese). [7] SINGER R A, SEA R G. New results in optimizing surveillance system tracking and data correlation performance in dense multitarget environment[J]. IEEE Transactions on Automatic Control, 1973, 18(6): 571-582. [8] BAR-SHALOM Y, DAUM F, HUANG J. The probabilistic data association filter[J]. IEEE Control Systems Magazine, 2009, 29(6): 82-100. [9] SINHA A, DING Z, KIRUBARAJAN T, et al. Track quality based multitarget tracking approach for global nearest-neighbor association[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 1179-1191. [10] MUSICKI D, SUVOROVA S. Tracking in clutter using IMM-IPDA-based algorithms[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(1): 111-126. [11] SVENSSON L, SVENSSON D, GUERRIERO M, et al. Set JPDA filter for multitarget tracking[J]. IEEE Transactions on Signal Processing, 2011, 59(10): 4677-4691. [12] REID D B. An algorithm for tracking multiple targets[J]. IEEE Transactions on Automatic Control, 1979, AC-24: 843–854. [13] KIM C, LI F X, CIPTADI A, et al. Multiple hypothesis tracking revisited[C]//Proceedings of the IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2015: 4696-4704. [14] MAHLER R P. Statistical multisource-multitarget information fusion[M]. Norwood: Artech House, 2007. [15] 陆小科, 张志国, 孙进平, 等. 基于杂波量测集约束的改进MS-MeMBer滤波器[J]. 北京航空航天大学学报, 2021, 47(9): 1748-1755.LU X K, ZHANG Z G, SUN J P, et al. An improved multi-sensor MeMBer filter based on clutter measurement set constraint[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1748-1755(in Chinese). [16] LECUN Y, BENGIO Y, HINTON G. Deep learning[J]. Nature, 2015, 521(7553): 436-444. [17] WRABEL A, GRAEF R, BROSCH T. A survey of artificial intelligence approaches for target surveillance with radar sensors[J]. IEEE Aerospace and Electronic Systems Magazine, 2021, 36(7): 26-43. [18] CHONG C Y. An overview of machine learning methods for multiple target tracking[C]//Proceedings of the IEEE 24th International Conference on Information Fusion. Piscataway: IEEE Press, 2021: 1-9. [19] LIU J X, WANG Z L, XU M. DeepMTT: a deep learning maneuvering target-tracking algorithm based on bidirectional LSTM network[J]. Information Fusion, 2020, 53: 289-304. [20] REVACH G, SHLEZINGER N, NI X Y, et al. KalmanNet: neural network aided Kalman filtering for partially known dynamics[J]. IEEE Transactions on Signal Processing, 2022, 70: 1532-1547. [21] MILAN A, REZATOFIGHI S H, DICK A, et al. Online multi-target tracking using recurrent neural networks[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2017, 31(1): 4225-4232. [22] LIU H J, ZHANG H, MERTZ C. DeepDA: LSTM-based deep data association network for multi-targets tracking in clutter[C]//Proceedings of the 22th International Conference on Information Fusion. Piscataway: IEEE Press, 2019: 1-8. [23] VERMA R, RAJESH R, EASWARAN M S. Modular multitarget tracking using long short-term memory networks[J]. Journal of Aerospace Information Systems, 2021, 18(10): 751-754. [24] 李文娜, 张顺生, 王文钦. 基于Transformer 网络的机载雷达多目标跟踪方法[J]. 雷达学报, 2022, 11(3): 469-478.LI W N, ZHANG S S, WANG W Q. Multi-target tracking method for airborne radar based on transformer network[J]. Journal of Radar, 2022, 11(3): 469-478(in Chinese). [25] ZENG S, WANG X Y, DUAN X J, et al. Kernelized Mahalanobis distance for fuzzy clustering[J]. IEEE Transactions on Fuzzy Systems, 2021, 29(10): 3103-3117. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 447
- HTML全文浏览量: 143
- PDF下载量: 12
- 被引次数: 0
