



A symplectic pseudo-spectral successive convex optimization method for trajectory planning of ascent stage of exo-atmosphere launch vehicle
-
摘要:
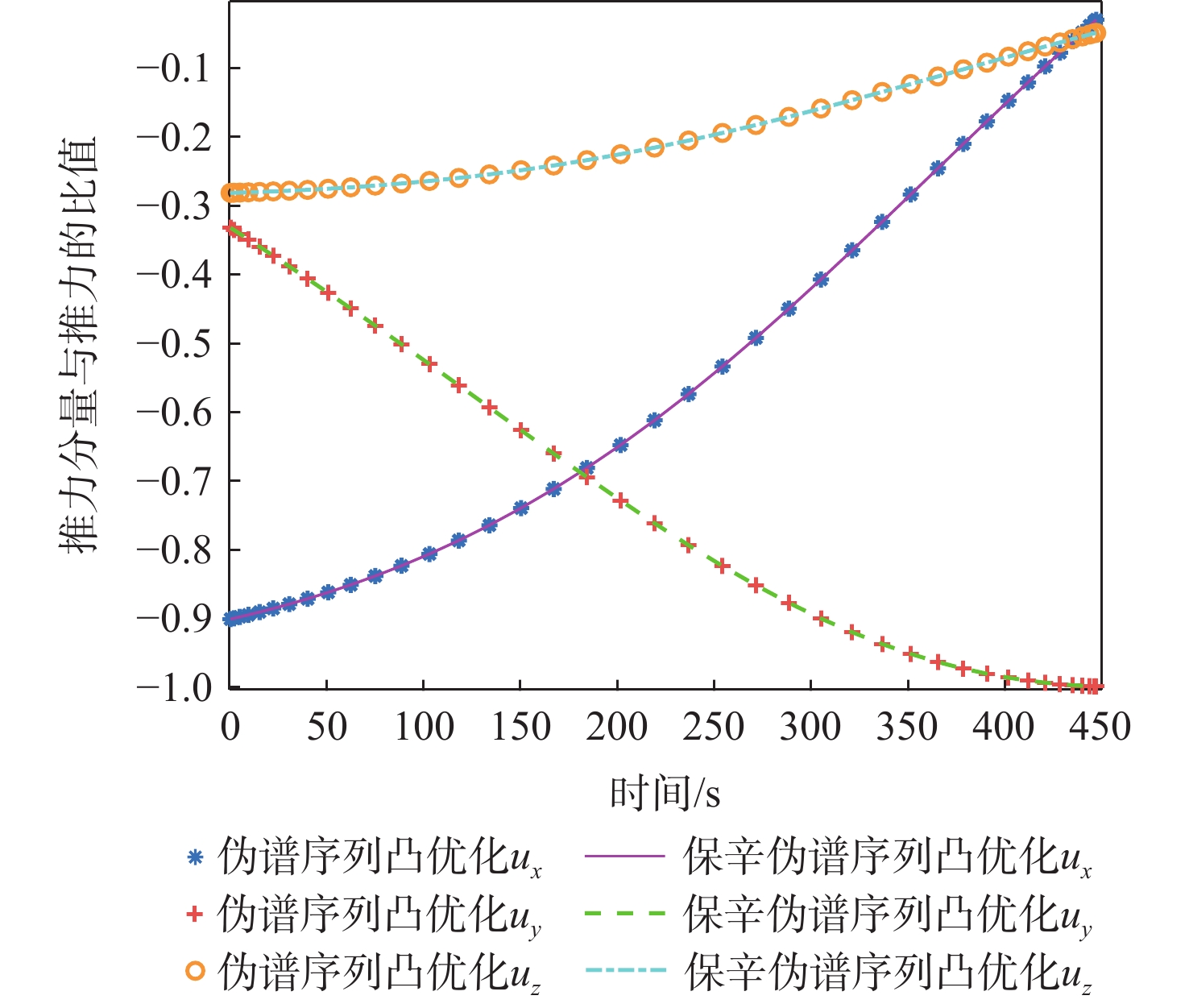
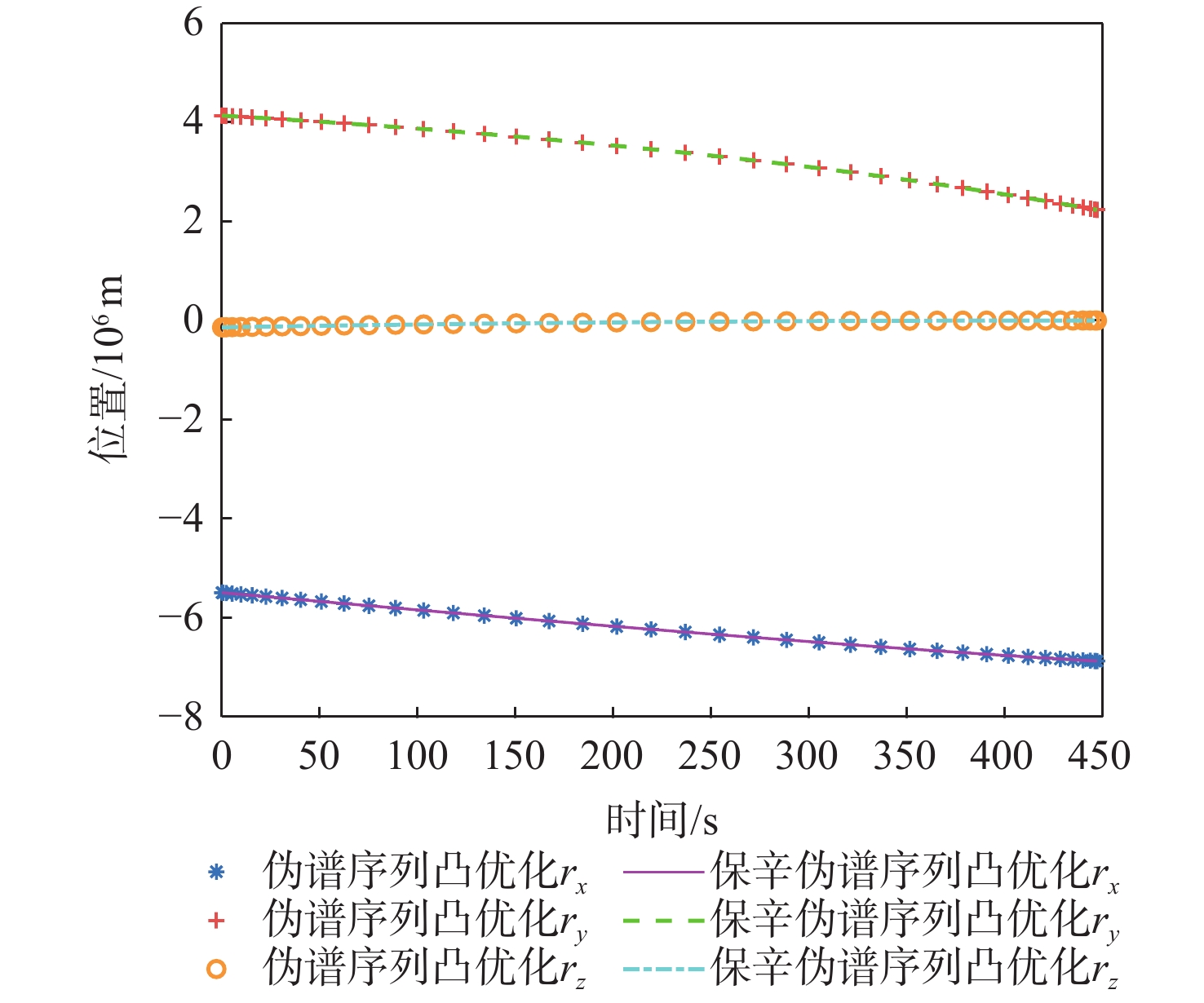
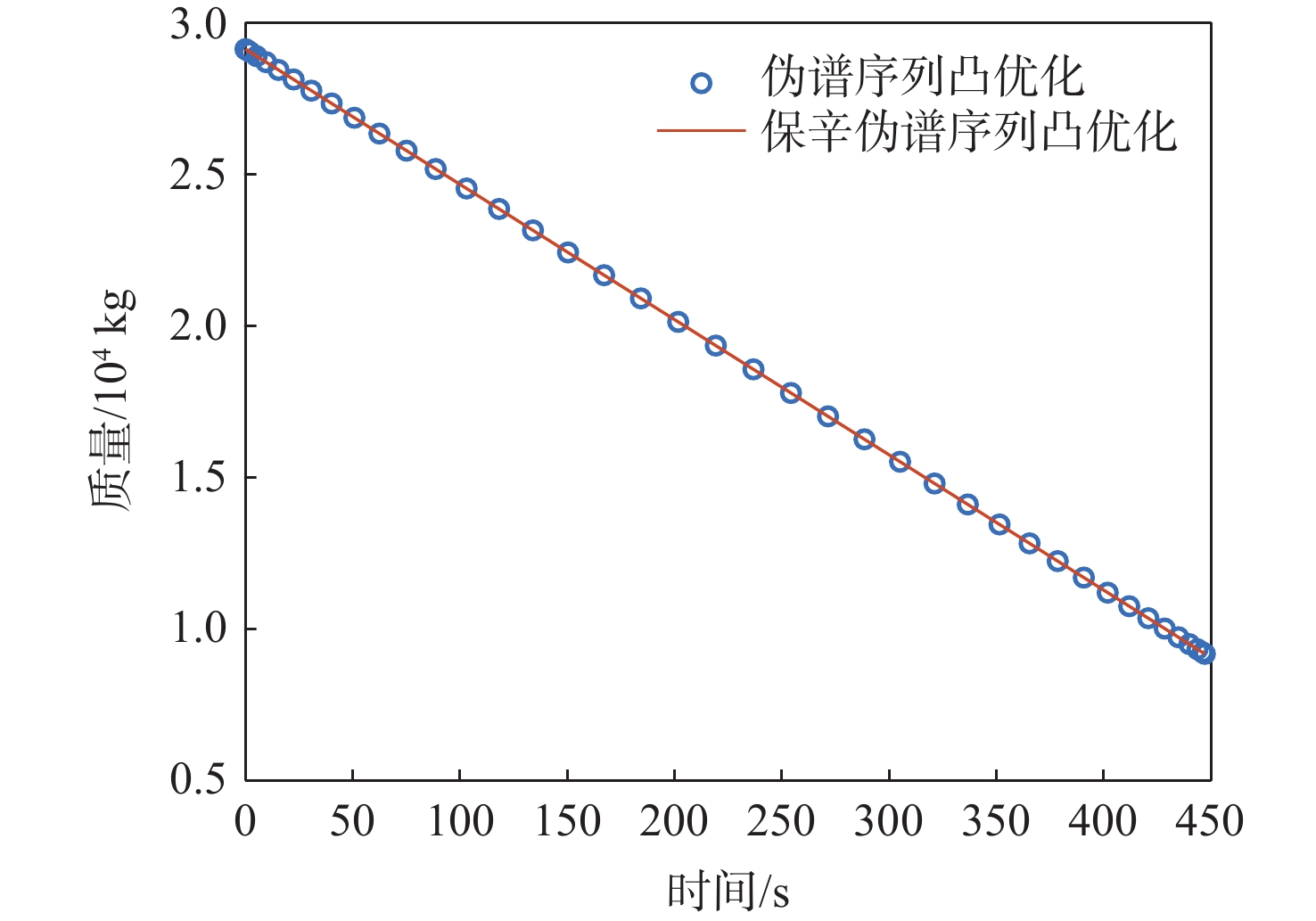
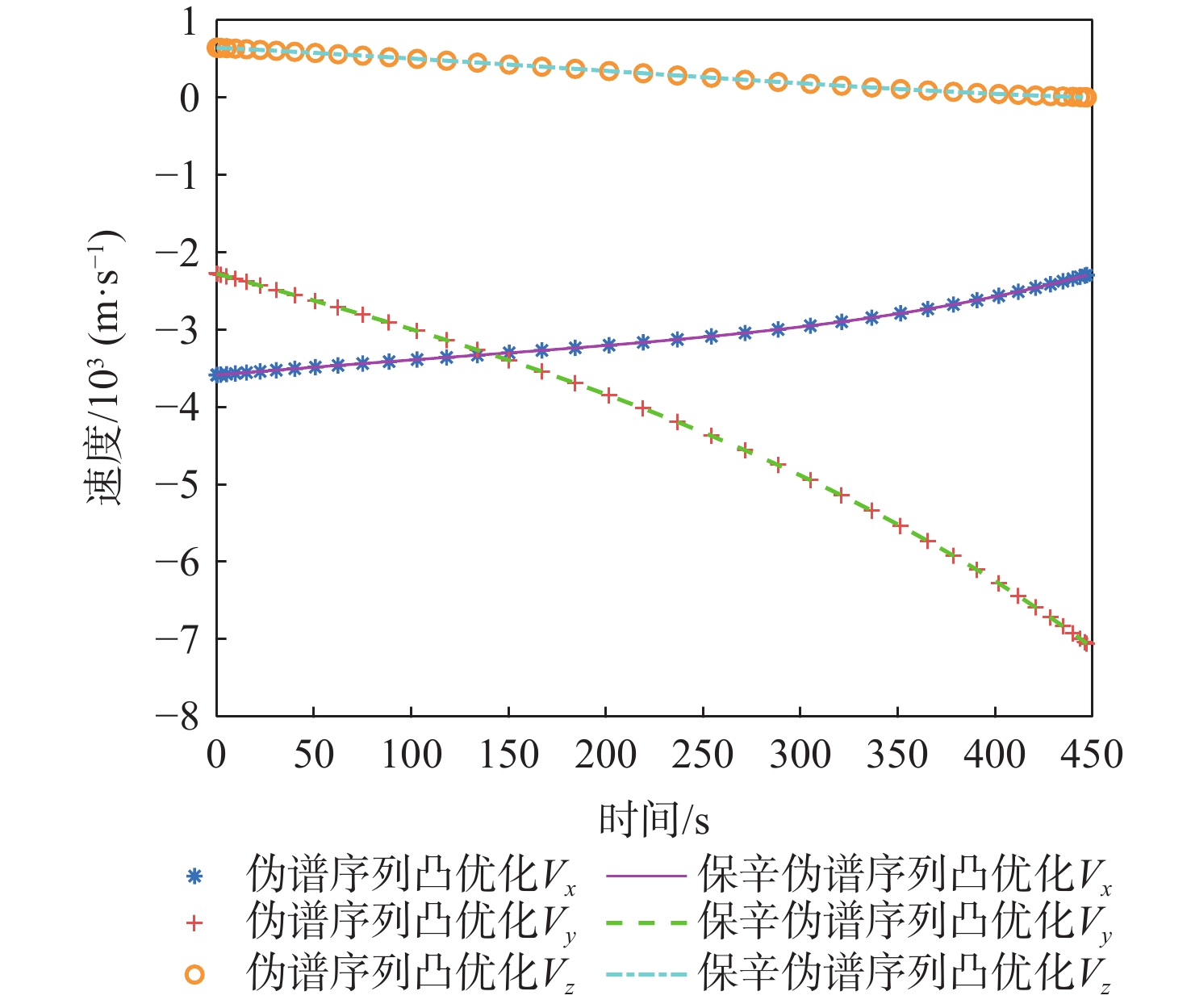
为完成对运载火箭入轨飞行段轨迹的优化,提高算法的计算效率及收敛性,从拉格朗日力学出发,在离散力学与最优控制(DMOC)计算方法的基础上结合伪谱法高精度的优点,推导出伪谱离散拉格朗日方程,并结合序列凸优化方法提出了基于保辛伪谱序列凸优化的轨迹优化方法。保辛伪谱序列凸优化方法可使离散动力学系统保留原连续系统的结构特征,同时使离散系统状态变量的维数大幅度降低,有效提升收敛性及计算效率。仿真结果表明:相比于经典的伪谱序列凸优化方法,保辛伪谱序列凸优化方法在不损失精度的情况下大幅度提高了计算效率,并且对初值扰动具有很好的适应性。
Abstract:In order to improve the computational efficiency and convergence of the algorithm, this paper derives the pseudo-spectral discrete Lagrange equation based on Lagrange mechanics, discrete mechanics and optimal control (DMOC) calculation method, combining with the advantages of high accuracy of the pseudo-spectral method. In conjunction with the successive convex optimization technique, a symplectic pseudo-spectral successive convex optimization-based trajectory optimization method is suggested. By significantly reducing the dimension of the discrete system’s state variables, the symplectic pseudo-spectral sequential convex optimization method can considerably increase convergence and computational efficiency while maintaining the structural features of the original continuous system. In contrast to the classical pseudo-spectral successive convex optimization method, the simulation results demonstrate that the symplectic pseudo-spectral successive convex optimization method has a good adoptability to the initial disturbance and can significantly increase computational efficiency without sacrificing accuracy.
-
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 $ {a_{{\text{tg}}}}/{\text{m}} $ 7218871.485 ${e_{{\text{tg}}}}$ 0.001503 ${i_{{\text{tg}}}}$/(°) 42 $ {{\varOmega }_{{\mathrm{tg}}}}$/(°) 288.5286 ${\omega _{{\text{tg}}}}$/(°) 155.7384 $P/{\text{kN}}$ 150 ${I_{{\text{sp}}}}/{\text{s}}$ 342.7864 ${m_0}/{\text{kg}}$ 29125.718 ${R_{\rm{e}}}/{\text{m}}$ 6378140 ${g_0}/\left( {{\text{m}} \cdot {{\text{s}}^{{{ - 2}}}}} \right)$ 9.8066 $\mu /\left( {{{\text{m}}^3} \cdot {{\text{s}}^{{{ - 2}}}}} \right)$ 3.986×1014  下载: 导出CSV
下载: 导出CSV
表 2 计算效率
Table 2. Calculate efficiency
计算方法 迭代次数 ECOS求解器
总耗时/ms计算
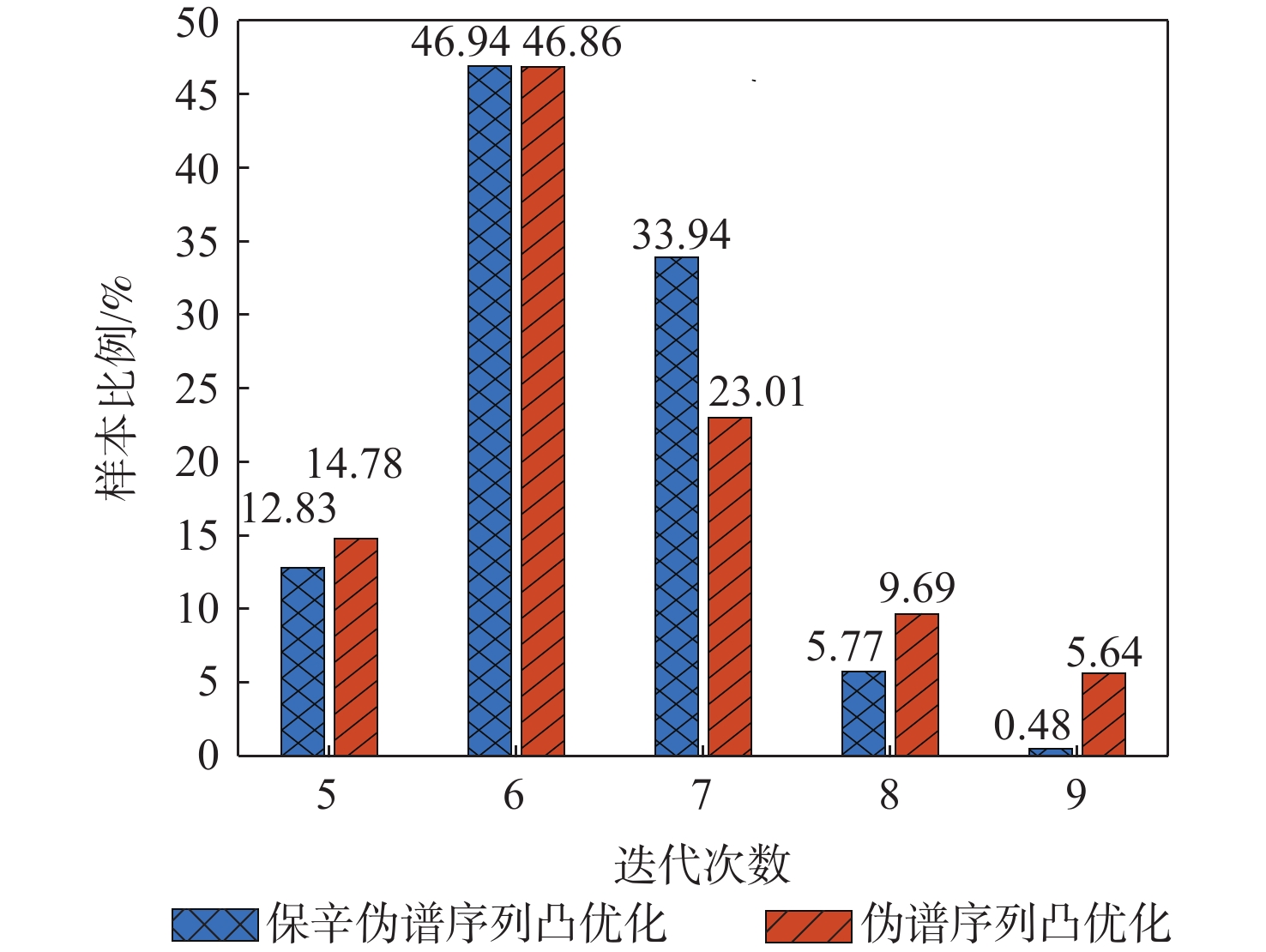
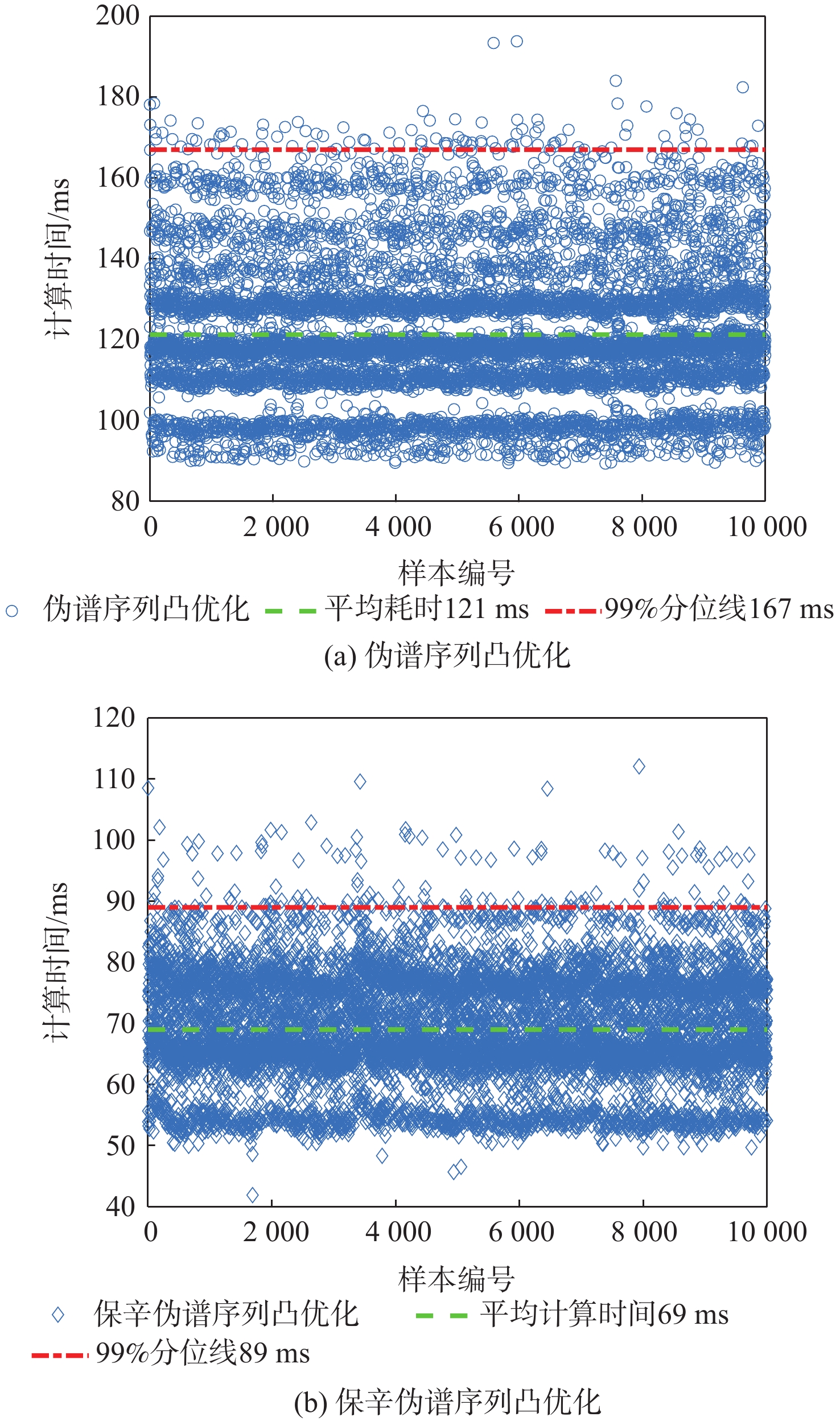
总时间/ms伪谱序列凸优化 6 110.7 116.6 保辛伪谱序列凸优化 6 58.7 63.1
下载: 导出CSV
表 3 入轨误差
Table 3. Orbital insertion
计算方法 $\Delta a/{\text{m}}$ $\Delta e$ $\Delta i{/ (^\circ) }$ $\Delta {\varOmega }{/ (^\circ) }$ $\Delta \omega {/(^\circ) }$ 伪谱序列凸优化 − 0.1958 $ 2.991\;0 \times {10^{ - 8}} $ $ - 6.146\;8 \times {10^{ - 8}} $ $ - 4.184\;0 \times {10^{ - 8}} $ 0.2219 保辛伪谱序列凸优化 − 0.3226 $ 2.233\;2 \times {10^{ - 8}} $ $ - 4.110\;5 \times {10^{ - 8}} $ $ - 8.650\;0 \times {10^{ - 8}} $ 0.2210
下载: 导出CSV
-
[1] 王嘉炜, 张冉, 郝泽明, 等. 基于Proximal-Newton-Kantorovich凸规划的空天飞行器实时轨迹优化[J]. 航空学报, 2020, 41(11): 121-130.WANG J W, ZHANG R, HAO Z M, et al. Real-time trajectory optimization for hypersonic vehicles with Proximal-Newton-Kantorovich convex programming[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(11): 121-130(in Chinese). [2] AÇIKMEŞE B, BLACKMORE L. Lossless convexification of a class of cptimal control problems with non-convex control constraints[J]. Automatica, 2011, 47(2): 341-347. [3] HARRIS M W, AÇIKMEŞE B. Lossless convexification of non-convex optimal control problems for state constrained linear systems[J]. Automatica, 2014, 50(9): 2304-2311. [4] ZHANG Z, WANG J, LI J. Lossless convexification of nonconvex MINLP on the UAV pathplanning problem[J]. Optimal Control Applications and Methods, 2018, 39(2): 845-859. [5] 宋雨, 张伟, 苗新元, 等. 可回收火箭动力着陆段在线制导算法[J]. 清华大学学报, 2021, 61(3): 230-239.SONG Y, ZHANG W, MIAO X Y, et al. Onboard guidance algorithm for the powered landing phase of a reusable rocket[J]. Journal of Tsinghua University, 2021, 61(3): 230-239(in Chinese). [6] 张志国, 马英, 耿光有, 等. 火箭垂直回收着陆段在线制导凸优化方法[J]. 弹道学报, 2017, 29(1): 9-16.ZHANG Z G, MA Y, GENG G Y, et al. Convex optimization method used in the landing-phase on-line guidance of rocket vertical recovery[J]. Journal of Ballistics, 2017, 29(1): 9-16(in Chinese). [7] SAGLIANO M. Pseudospectral convex optimization for powered descent and landing[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(2): 320-334. [8] WANG J B, CUI N G. A pseudospectral-convex optimization algorithm for rocket landing guidance[C]//Proceedings of thu AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2018: 8-12. [9] PINSON R, LU P. Trajectory design employing convex optimization for landing on irregularly shaped asteroids[J]. Journal of Guidance, Control and Dynamics, 2018, 41(6): 1243-1256. [10] 林晓辉, 于文进. 基于凸优化理论的含约束月球定点着陆轨道优化[J]. 宇航学报, 2013, 34(7): 901-908.LIN X H, YU W J. Constrained trajectory optimization for lunar pin-point landing based on convex optimization theory[J]. Journal of Astronautics, 2013, 34(7): 901-908(in Chinese). [11] 宋征宇, 王聪, 巩庆海. 运载火箭上升段推力下降故障的自主轨迹规划方法[J]. 中国科学: 信息科学, 2019, 49(11): 1472-1487.SONG Z Y, WANG C, GONG Q H. Autonomous trajectory planning for launch vehicle under thrust drop failure[J]. Scientia Sinica Informationis, 2019, 49(11): 1472-1487(in Chinese). [12] 李源. 运载火箭动力故障下在线轨迹规划与自适应制导方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2022: 53-73.LI Y. Research on online trajectory optimization and adaptive guidance for power system fault of launch vehicle[D]. Harbin: Harbin Institution of Technology, 2022: 53-73(in Chinese). [13] MARSDEN J E, WEST M. Discrete mechanics and variational integrators[J]. Acta Numerica, 2001, 10: 357-514. [14] 李亚男. 基于李群的多体系统动力学仿真[D]. 青岛: 青岛大学2019: 43-53.LI Y N. Dynamic simulation of multi-body system based on Lie group[D]. Qingdao: Qingdao University, 2019: 43-53(in Chinese). [15] 杨盛庆. 基于几何力学与最优控制的无人机编队方法研究[D]. 北京: 北京理工大学, 2014: 71-91.YANG S Q. Geometric mechanics and optimal control of UAVs formation[D]. Beijing: Beijing Institute of Technology, 2014: 71-91(in Chinese). [16] LEE T, LEOK M, MCCLAMROCH N H. Lie group variational integrators for full body problem[J]. Celestial Mechanics and Dynamical Astronomy, 2007, 196: 2907-2924. [17] OBER-BLOBAUM S, JUNGE O, MARSDEN J E. Discrete mechanics and optimal control: an analysis[J]. ESAIM, 2011, 17(2): 322-352. [18] 高强, 彭海军, 吴志刚, 等. 非线性动力学系统最优控制问题的保辛求解方法[J]. 动力学与控制学报, 2010, 8(1): 1-7.GAO Q, PENG H J, WU Z G, et al. Symplectic method for solveing optimal control problem of nonlinear dynamical systems[J]. Journal of Dynamics and Control, 2010, 8(1): 1-7(in Chinese). [19] 彭海军. 计算最优控制的保辛数值方法及其在平动点附近航天器控制中的应用[D]. 大连: 大连理工大学, 2012: 142-153.PENG H J. Symplectic numerical method for computational optimal control and its application in the control of spacecraft near the libration point[D]. Dalian: Dalian University of Technology, 2012: 142-153(in Chinese). [20] 王昕炜. 非线性最优控制问题的保辛伪谱方法及其应用[D]. 大连: 大连理工大学, 2020: 40-54.WANG X W. Symplectic pseudospectral methods for nonlinear optimal control problems and their applications[D]. Dalian: Dalian University of Technology, 2020: 40-54(in Chinese). [21] LIU X. Autonomous trajectory planning by convex optimization[D]. Ames: Iowa State University, 2013: 11-18. [22] 谭述君, 何骁, 张立勇, 等. 运载火箭推力故障下基于智能决策的在线轨迹重规划方法[J]. 宇航学报, 2021, 42(10): 1228-1236.TAN S J, HE X, ZHANG L Y, et al. Online trajectory replanning method based on intelligent decision-making for launch vehicles under thrust drop failure[J]. Journal of Astronautics, 2021, 42(10): 1228-1236(in Chinese). [23] 罗淑贞, 孙青林, 檀盼龙, 等. 基于高斯伪谱法的翼伞系统复杂多约束轨迹规划[J]. 航空学报, 2017, 38(3): 220-230.LUO S Z, SUN Q L, TAN P L, et al. Trajectory planning of parafoil system with intricate constraints based on Gauss pseudo-spectral method[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(3): 220-230(in Chinese). [24] 李瑾, 王永海, 赵雅心, 等. 基于可变信赖域的飞行器轨迹快速优化[J]. 计算机仿真, 2023, 40(6): 32-37.LI J, WANG Y H, ZHAO Y X, et al. Fast optimization of aircraft trajectory based on variable trust region[J]. Computer Simulation, 2023, 40(6): 32-37(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 578
- HTML全文浏览量: 252
- PDF下载量: 17
- 被引次数: 0
