



Dynamics modeling and active disturbance rejection control method of translation in a magnetically suspended universally stabilized platform
-
摘要:
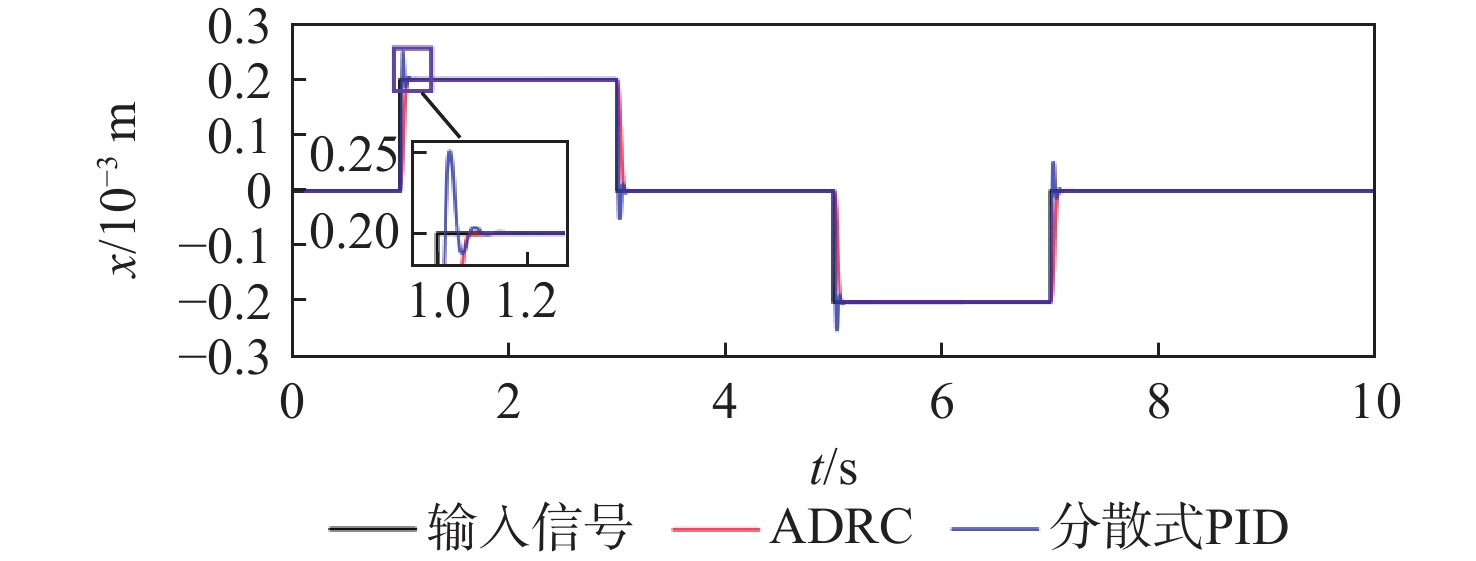
针对空间激光通信等复杂航天任务对卫星平台高精高稳指向控制技术的迫切需求,开展球面磁悬浮万向稳定平台(MSUSP)构型设计与控制方法研究。分析MSUSP万向稳定悬浮特性,设计直角-正三棱锥构型的空间结构,建立球面磁轴承3自由度动力学模型,通过坐标变换实现磁轴承动子平动测量解耦。在此基础上,为实现外部扰动条件下的磁轴承动子稳定控制,设计基于坐标变换的3通道自抗扰控制器,将各通道之间的未建模动态及外部扰动当作合并外扰,进行跟踪、补偿,从而提高扰动条件下控制器的快速性和稳定性。分析仿真结果表明:相较于传统方法,所提方法平动阶跃响应时间缩短42.86%,不同频率正弦扰动下的磁轴承动子抗干扰性均得到大幅提升,证明了所提方法的有效性和优越性。
Abstract:In response to the urgent demand for high-precision and high-stability pointing control technology of satellite platforms for complex space missions such as space laser communication, research has been conducted on the configuration design and control method of a spherical magnetically suspended universally stabilized platform (MSUSP). Firstly, the omnidirectional stable suspension characteristics of the MSUSP were analyzed, and a space structure with a right-angled equilateral triangular pyramid configuration was designed. Coordinate transformation was used to decouple the magnetic bearing rotor translation, and a three-degree-of-freedom dynamic model of the spherical magnetic bearing was created. Based on this, in order to achieve stable control of the magnetic bearing rotor under external disturbance conditions, a three-channel self-disturbance rejection controller based on coordinate transformation was designed, which treated the unmodeled dynamics and external disturbances between each channel as merged disturbances for tracking and compensation, thereby improving the speed and stability of the controller under disturbance conditions. The effectiveness and superiority of the suggested method were demonstrated by the analysis of simulation results, which revealed that this method significantly improved the anti-interference performance of the magnetic bearing rotor under various frequency sinusoidal disturbances and reduced the step response time for translational motion by 42.86% when compared to traditional methods.
-
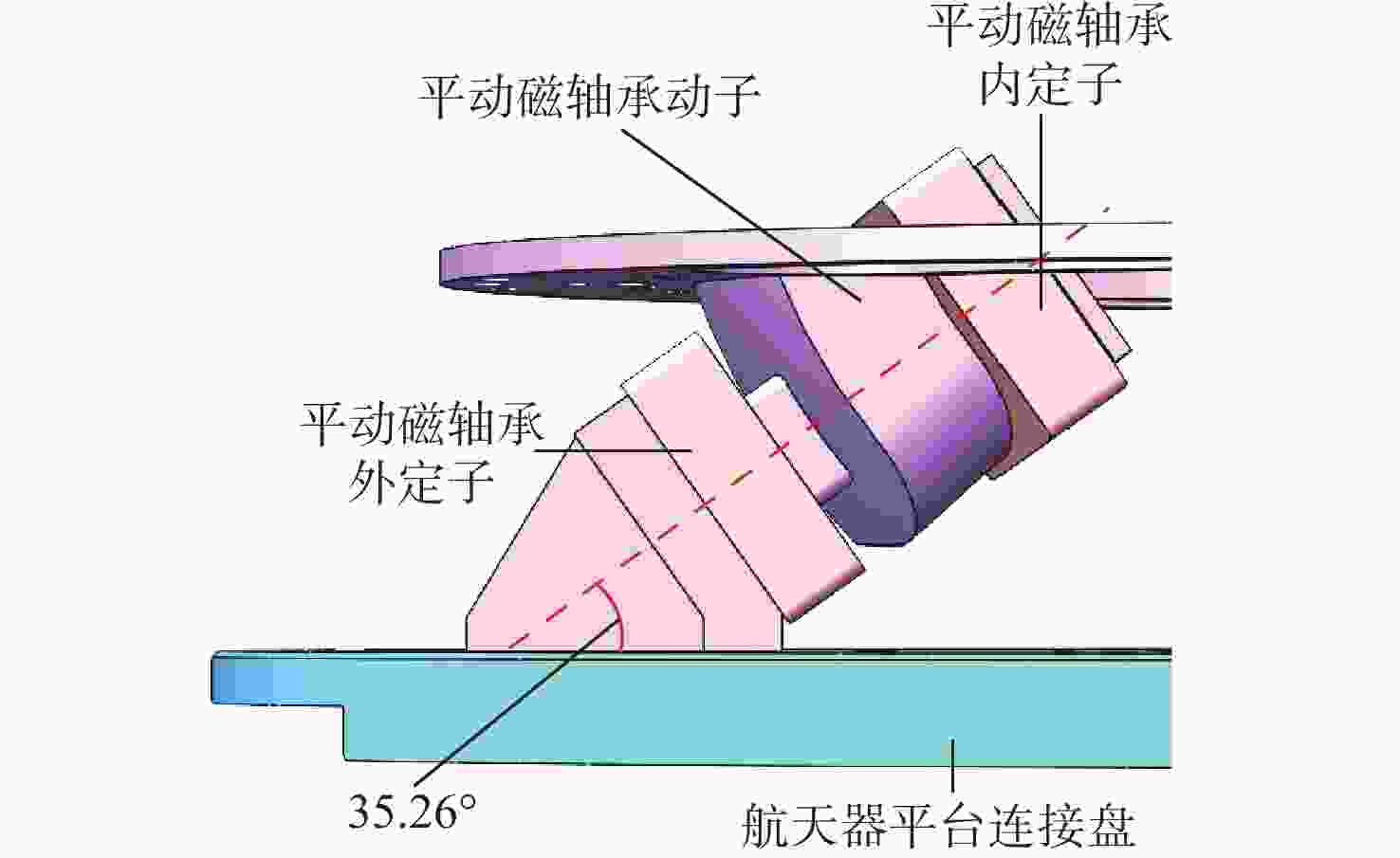
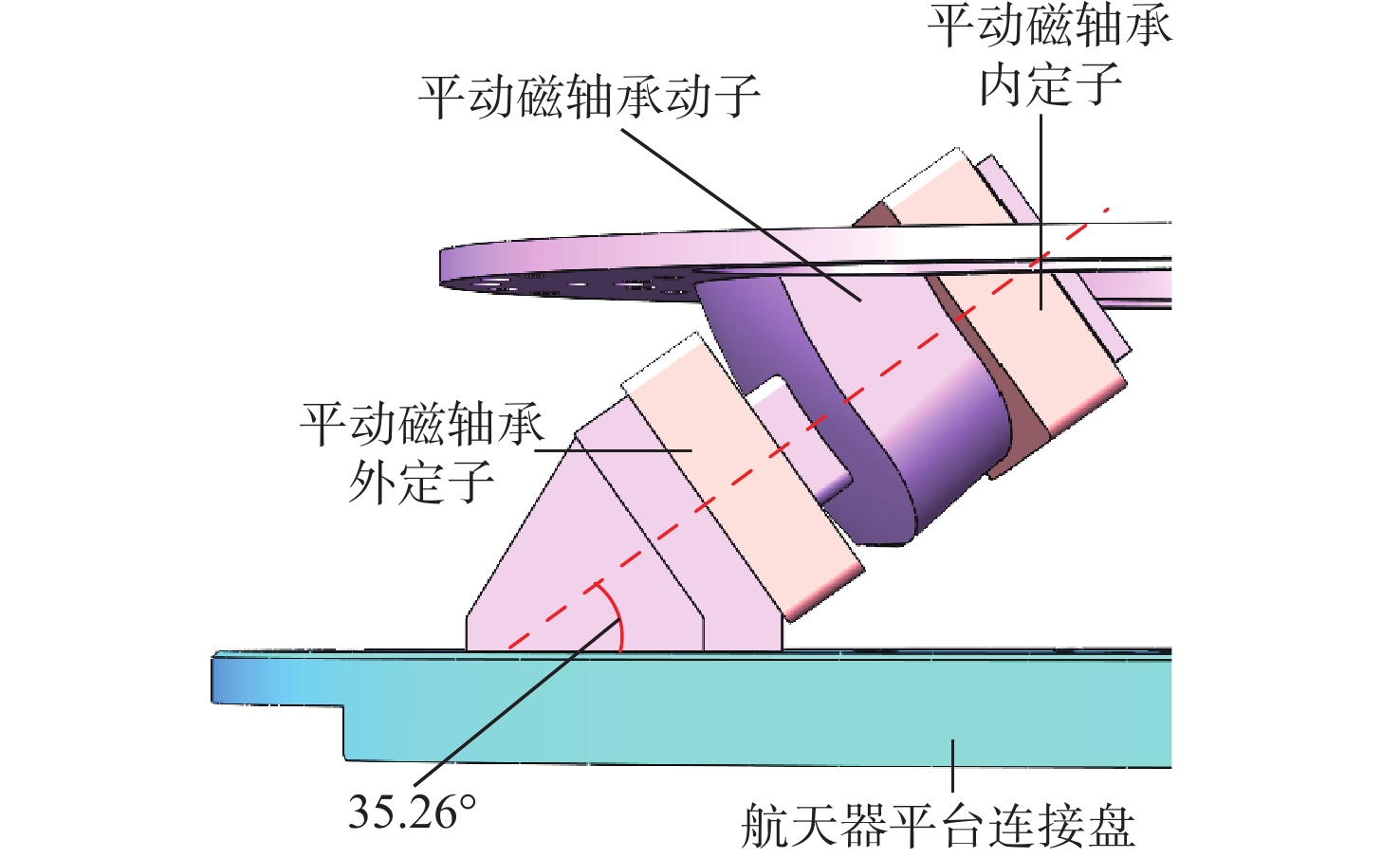
图 3 磁轴承与径向平面夹角示意图
Figure 3. Schematic diagram of the angle between the magnetic bearing and the radial plane
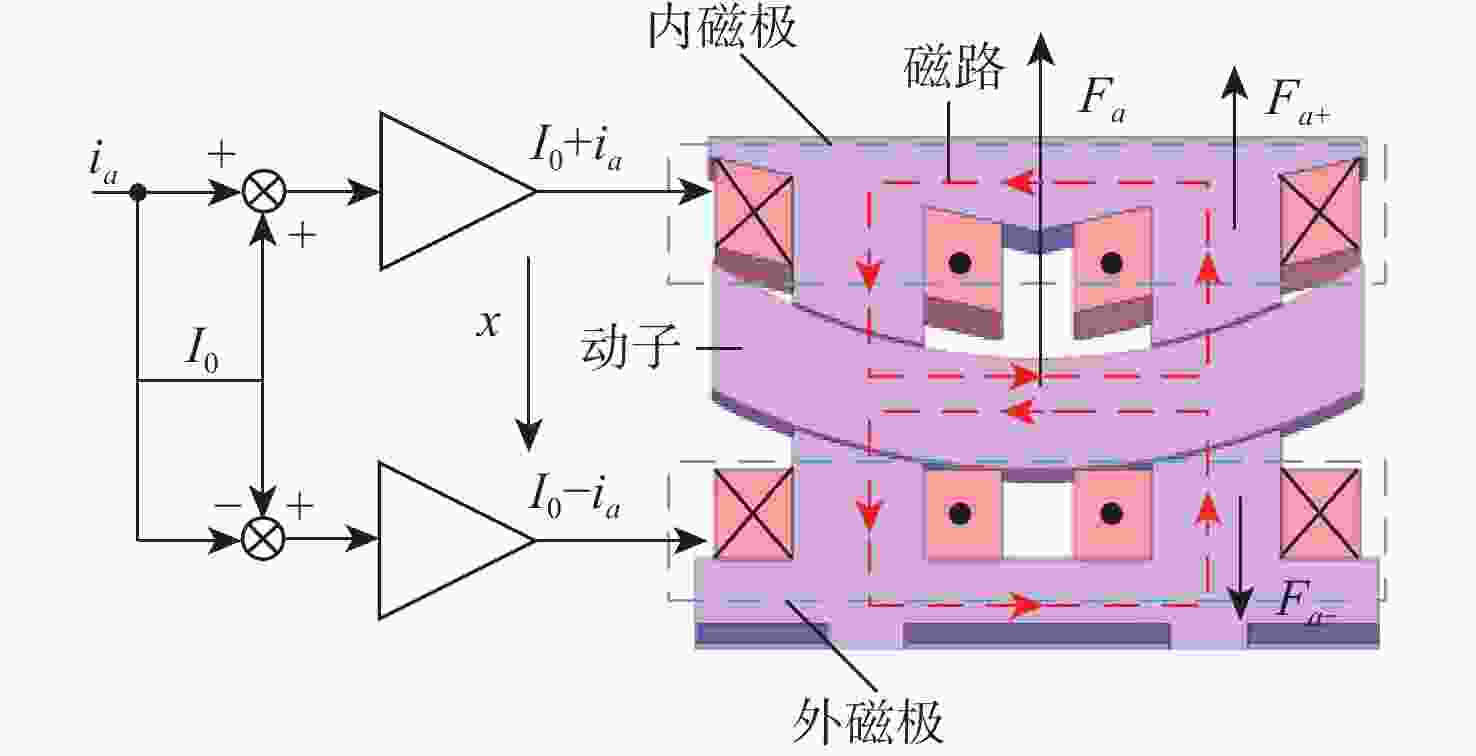
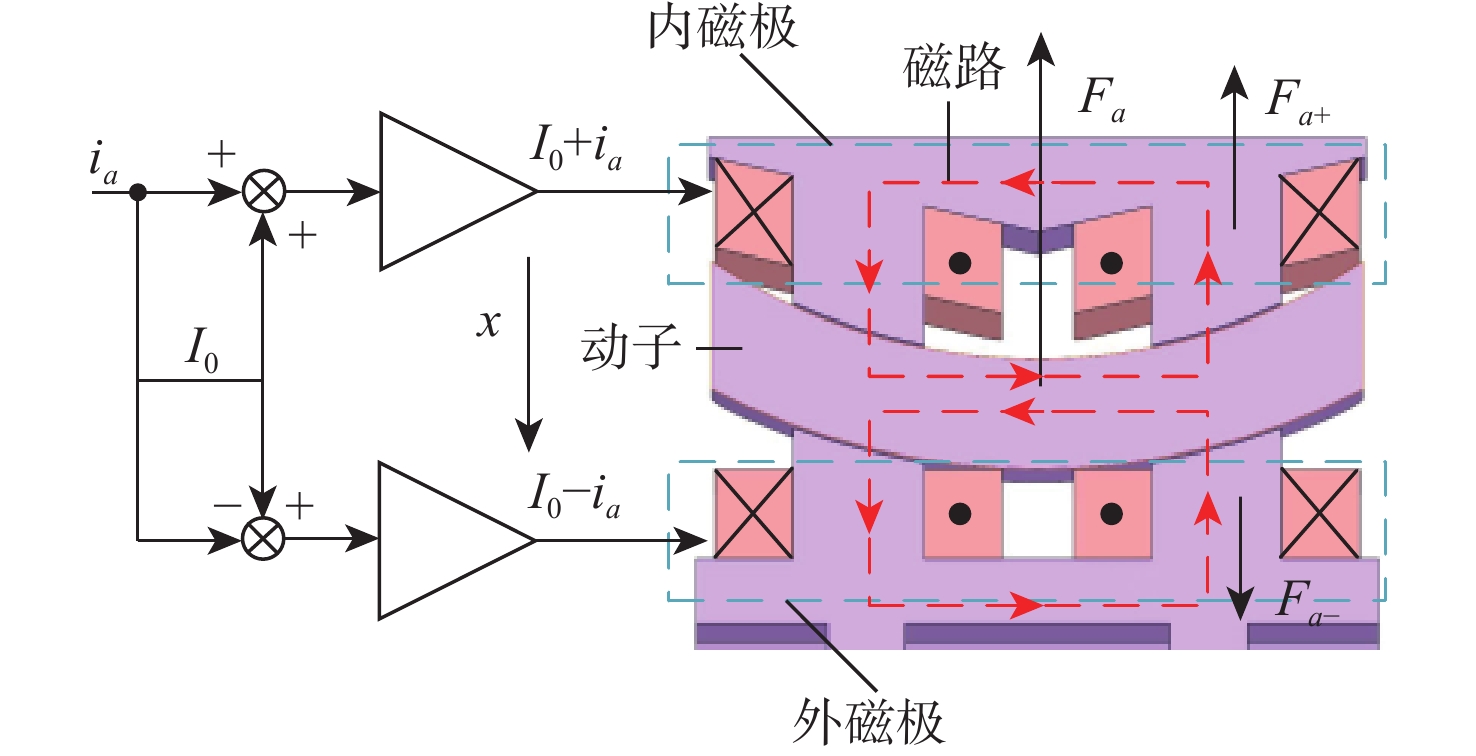
图 4 磁阻力磁轴承单通道工作示意图
Figure 4. Schematic diagram of single-channel operation of magnetic resistance magnetic bearing
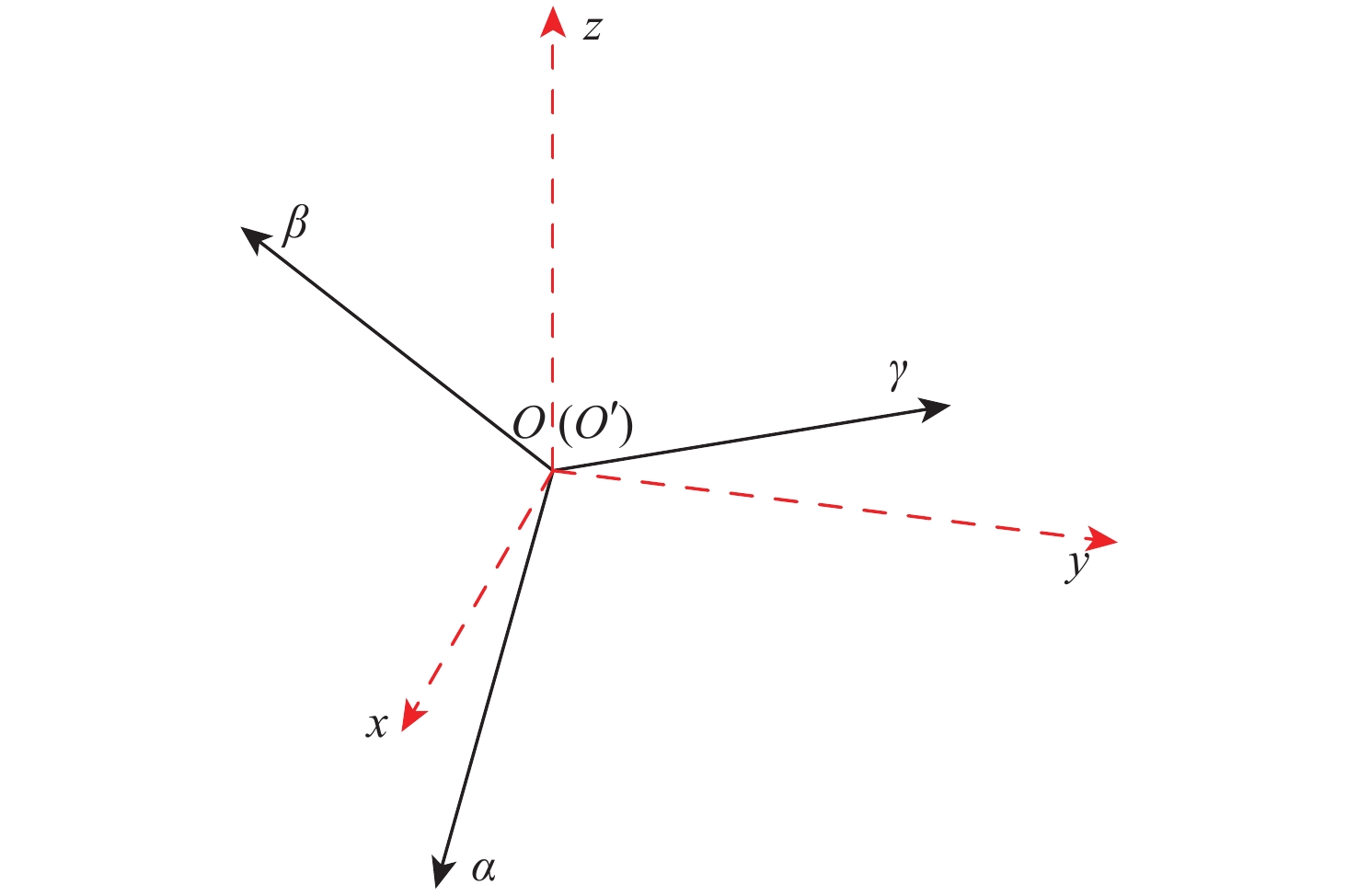
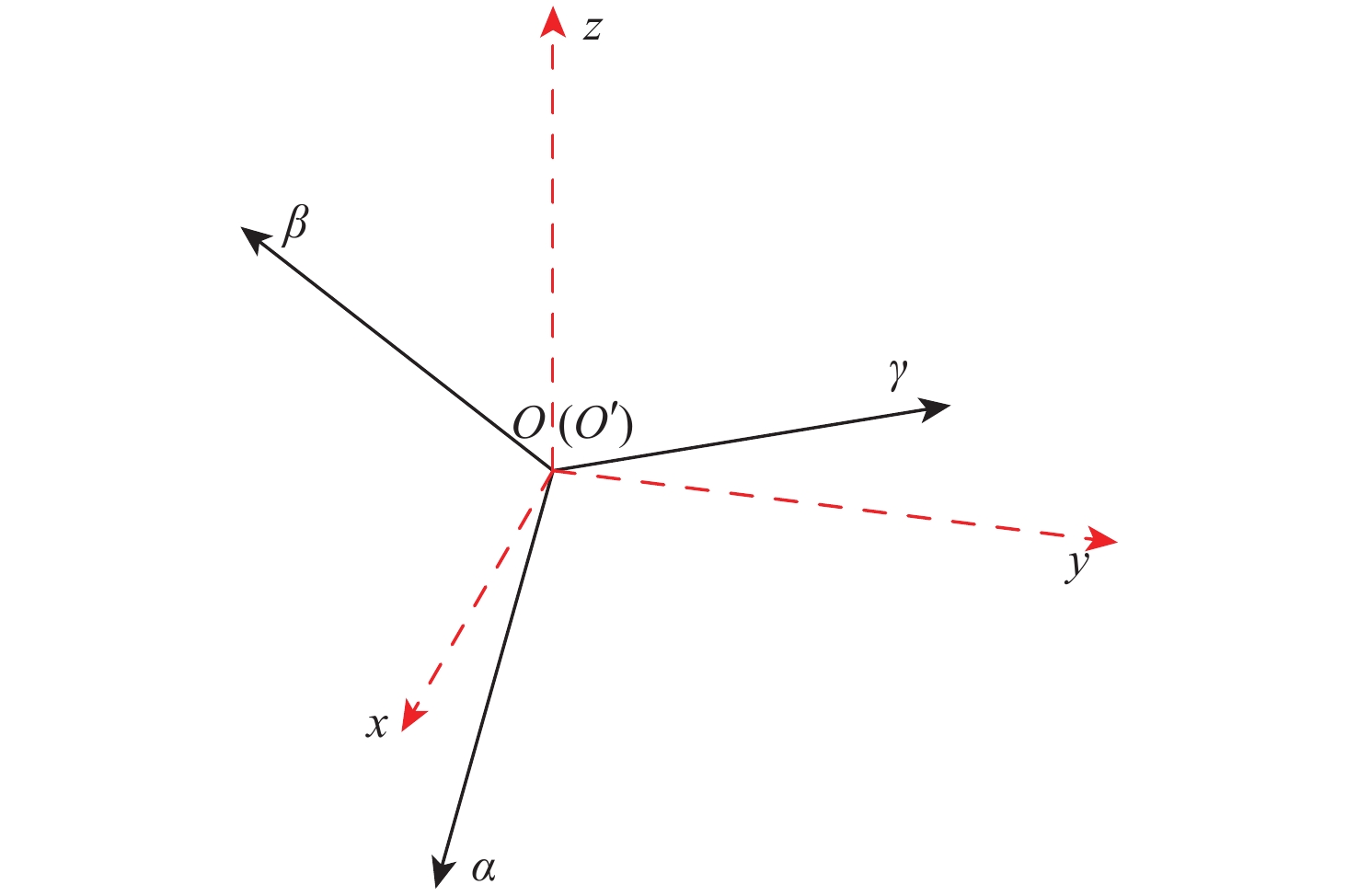
图 5 磁轴承坐标系与位移坐标系相对位置示意图
Figure 5. Schematic diagram of the relative positions of the magnetic bearing coordinate system and the displacement coordinate system
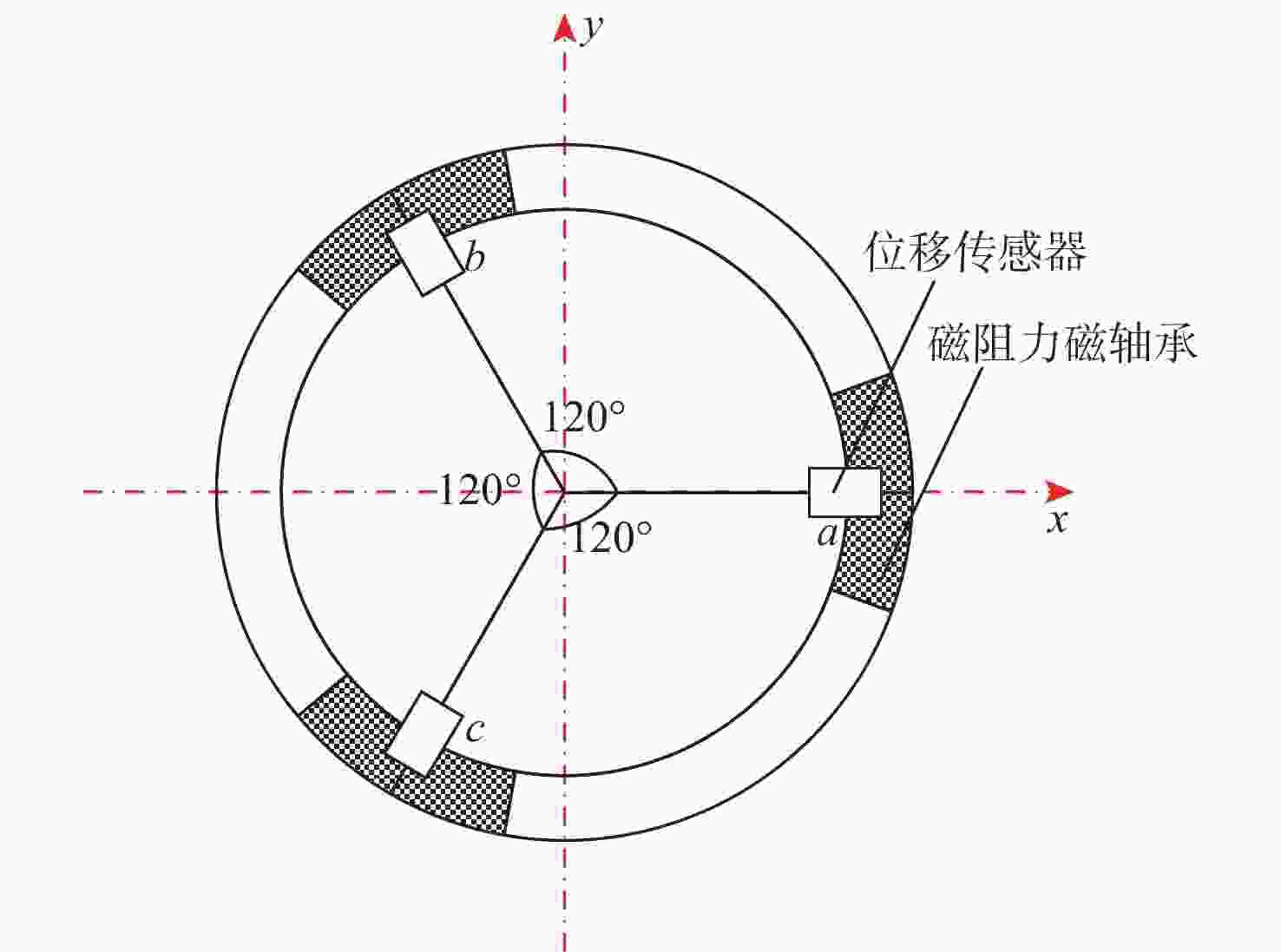
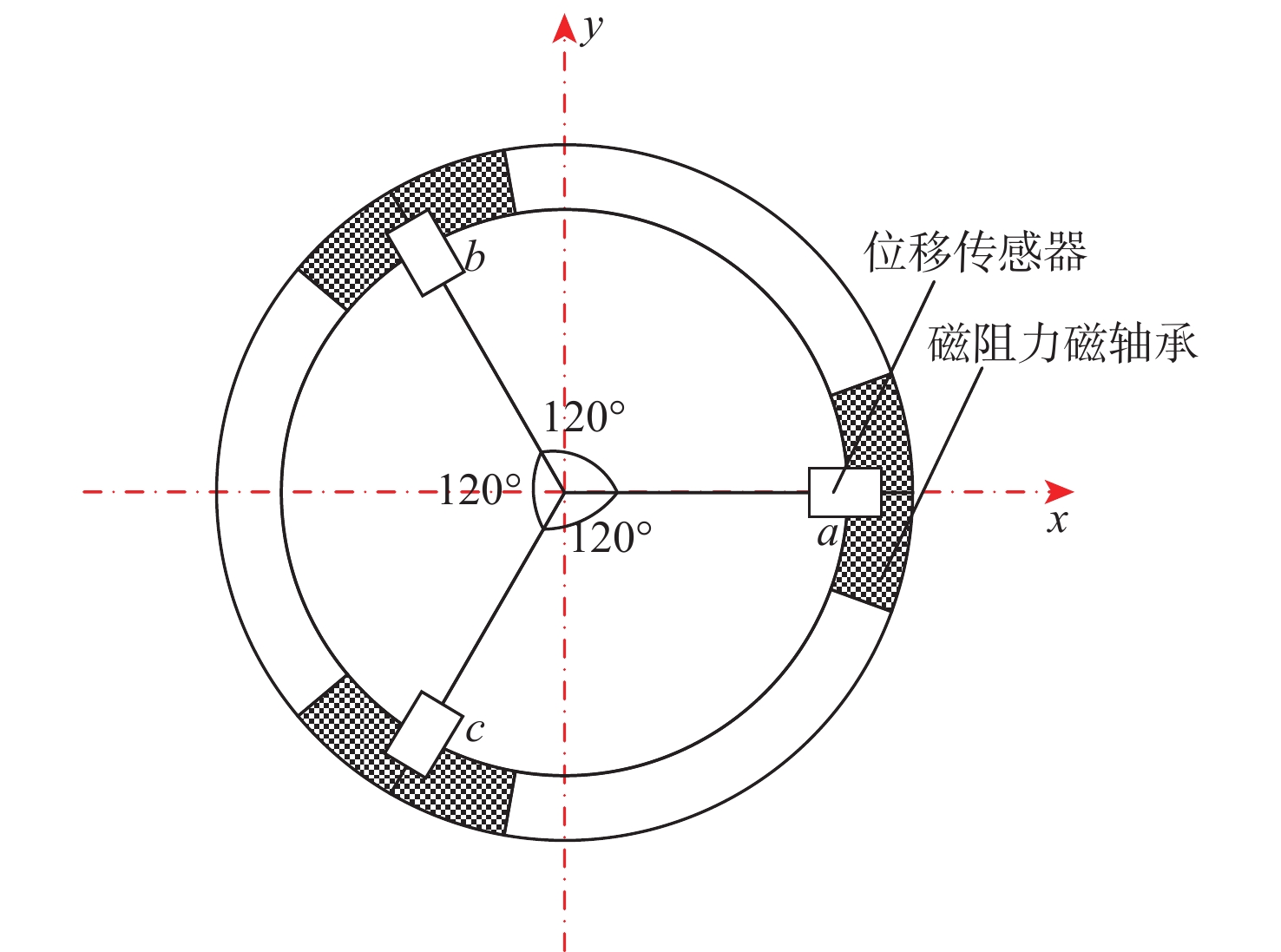
图 6 位移传感器相对位置示意图
Figure 6. Schematic diagram of the relative position of the displacement sensor
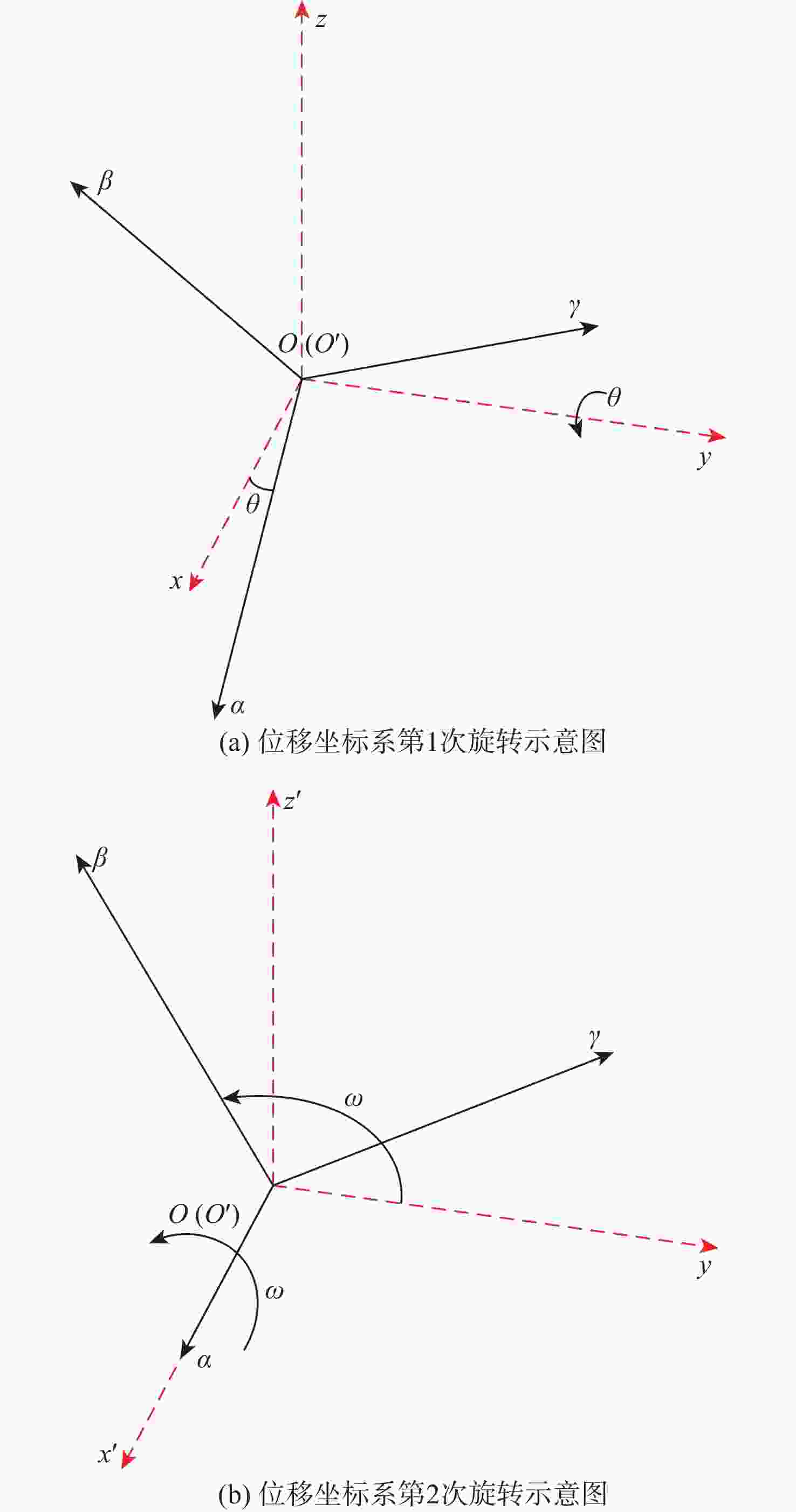
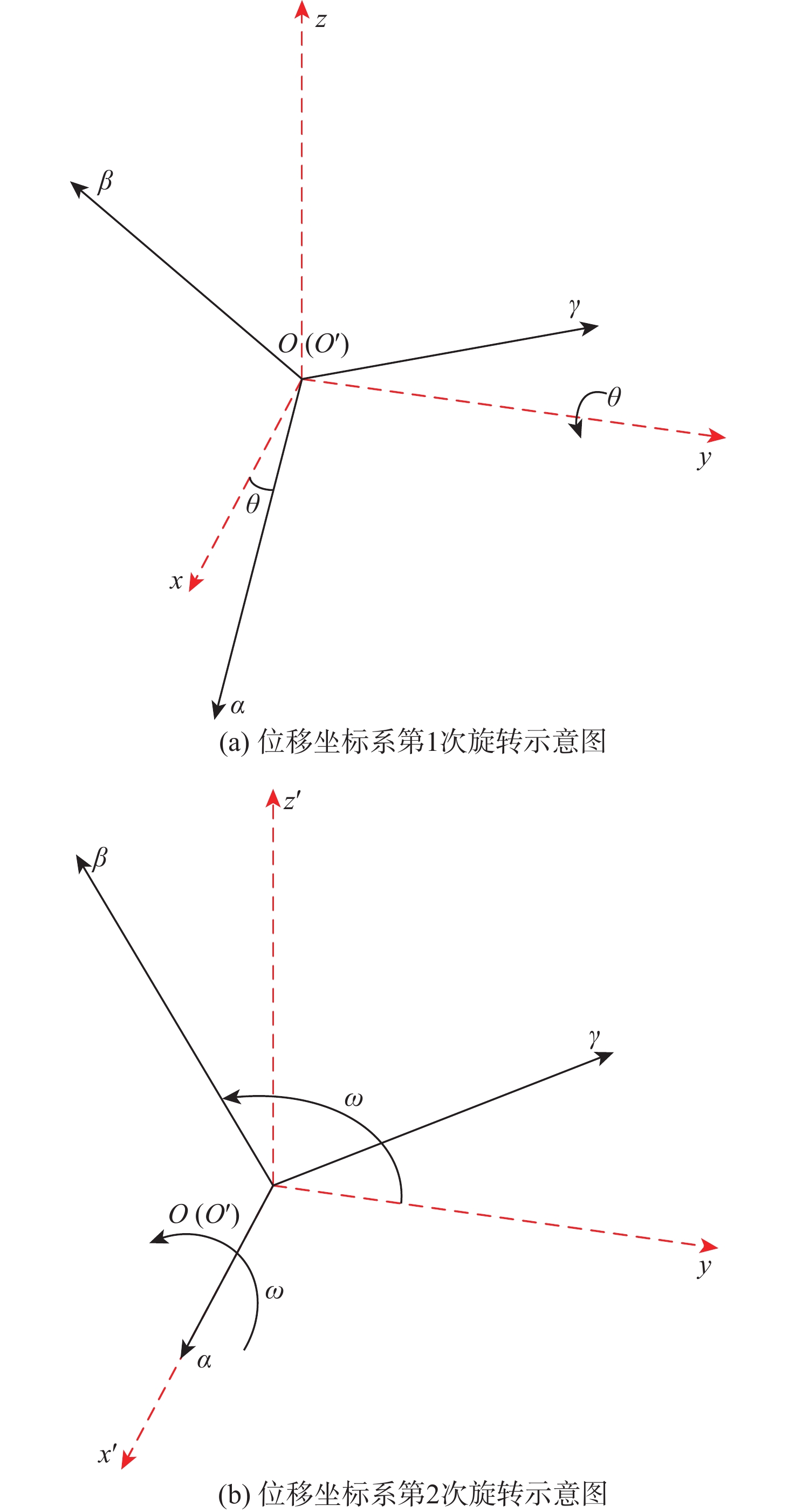
图 7 位移坐标系转换示意图
Figure 7. Schematic diagram of displacement coordinate system conversion
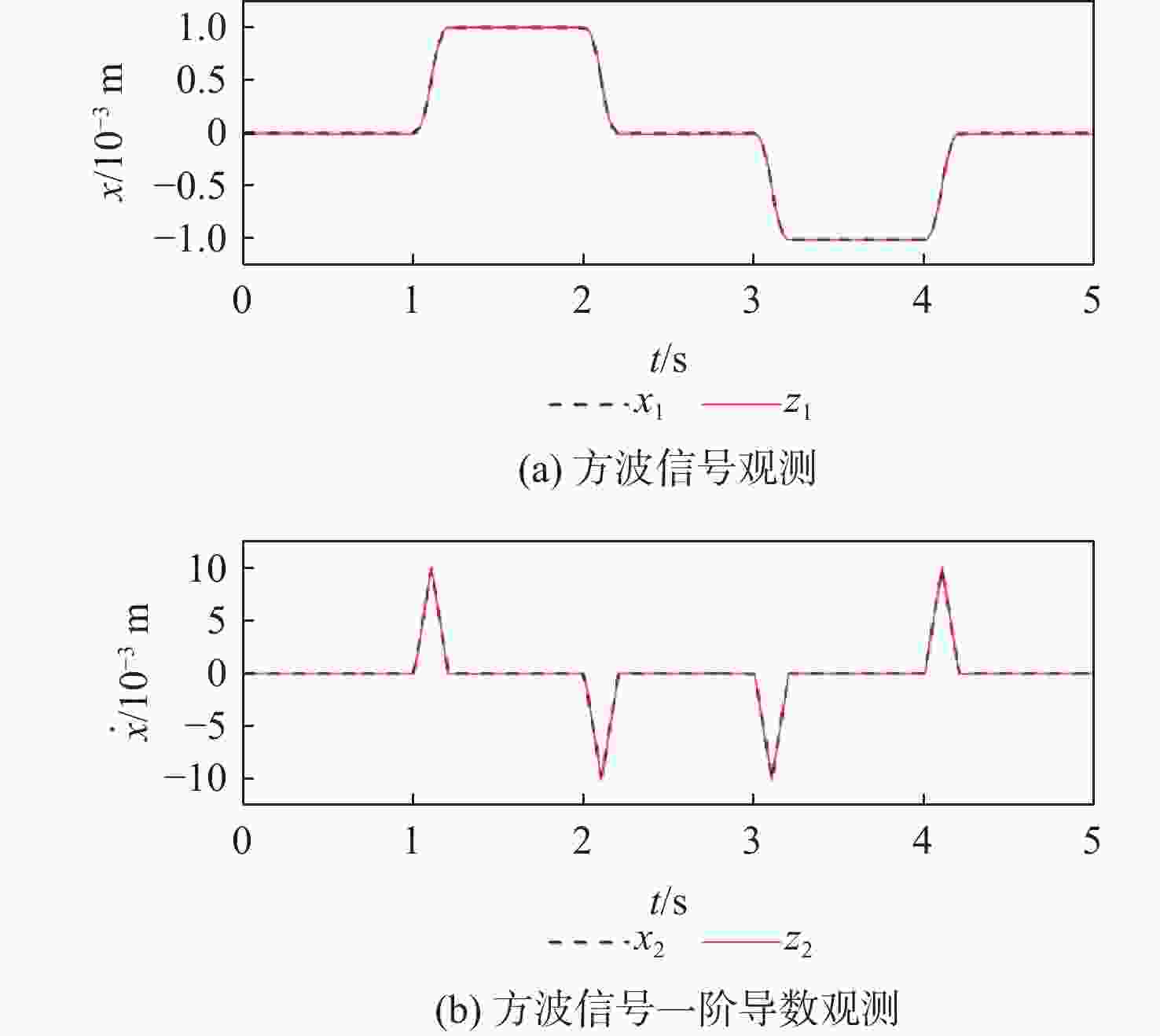
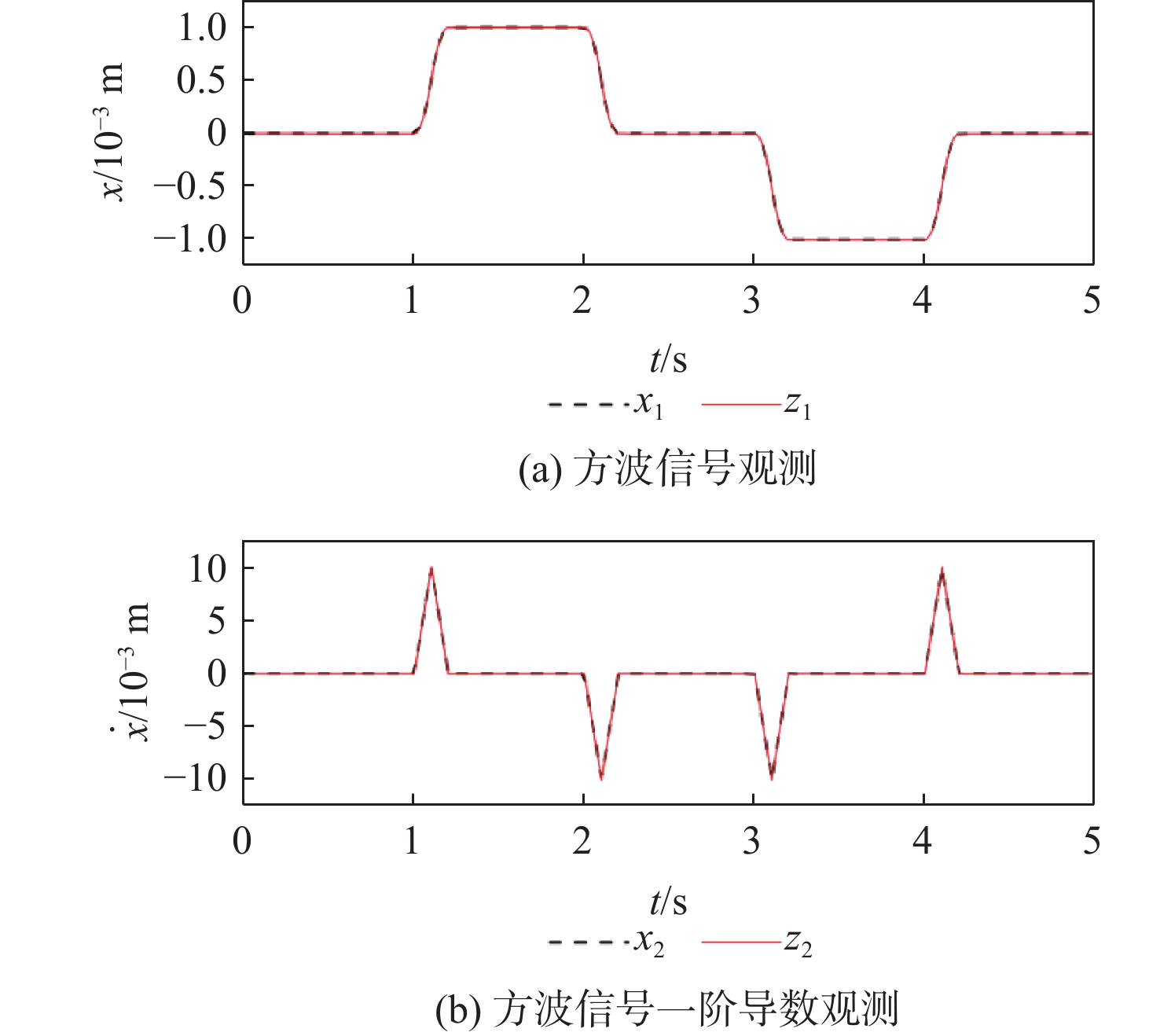
图 10 方波信号及其一阶导数的ESO观测效果
Figure 10. Effect of ESO observation of square wave signals and their first-order derivatives
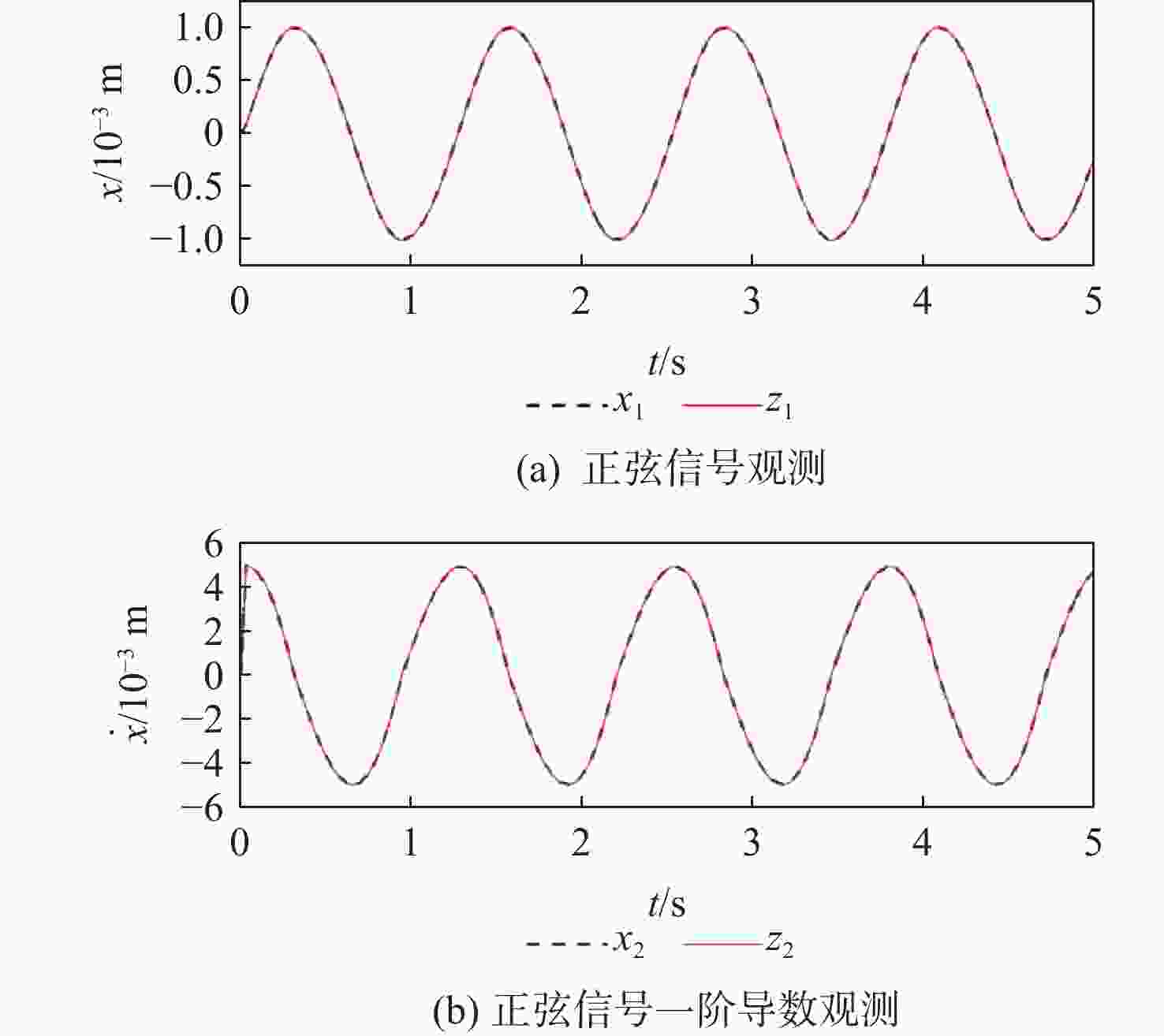
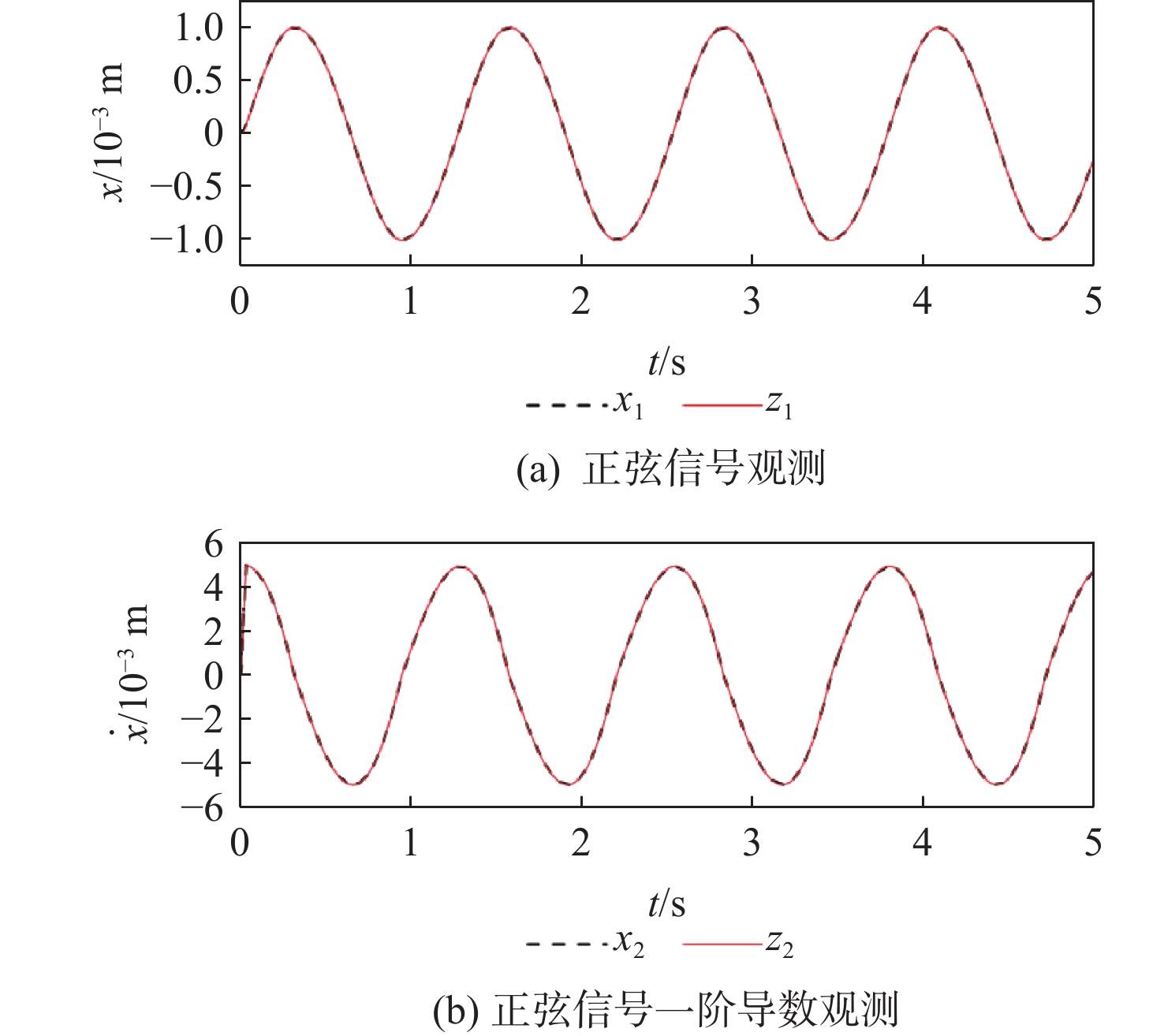
图 11 正弦信号及其一阶导数的ESO观测效果
Figure 11. Effects of ESO observations of sinusoidal signals and their first-order derivatives
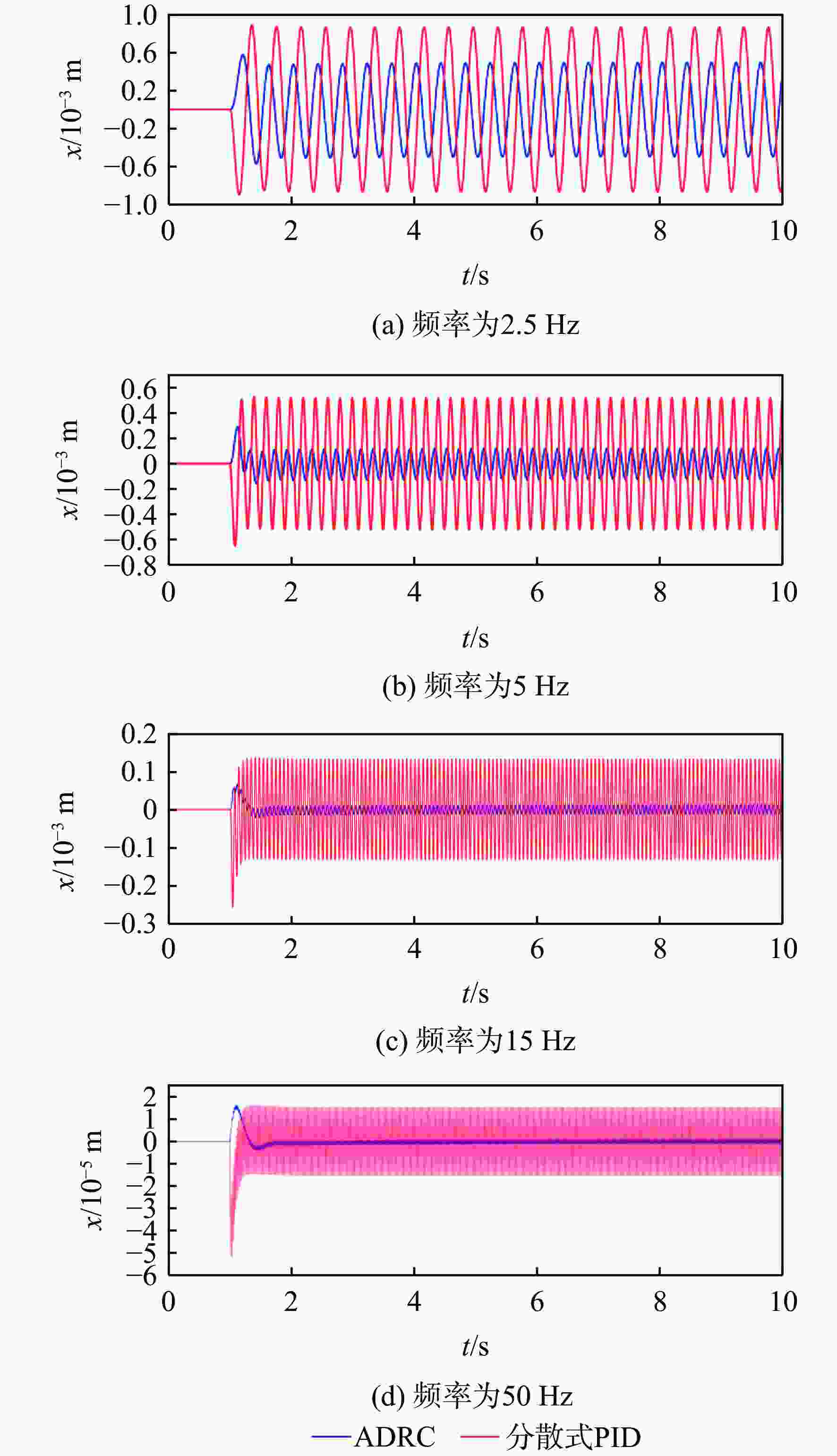
图 13 不同频率下抗干扰性能验证
Figure 13. Verification of anti-interference performance at different frequencies
表 1 MSUSP参数
Table 1. MSUSP parameters
$ {K}_{{\mathrm{i}}} $/(N·A−1) $ {K}_{{\mathrm{s}}} $/(N·μm−1) m/kg Lm/mH Rm/$ \Omega $ 225 0.315 14.7 4 13.5  下载: 导出CSV
下载: 导出CSV
表 2 ADRC参数
Table 2. ADRC parameters
r $ {h}_{0} $ $ {\delta }_{g} $ $ ({c}_{1},{c}_{2},{c}_{3}) $ $ ({\beta }_{1},{\beta }_{2}) $ $ ({\alpha }_{n1},{\alpha }_{n2}) $ $ {\delta }_{n} $ 160 0.001 0.01 (63,77,12) (100,20) (0.75,1.5) 0.08
下载: 导出CSV
表 3 PID控制器参数
Table 3. PID controller parameters
$ {K}_{\text{P}} $ $ {K}_{\text{I}} $ $ {K}_{\text{D}} $ 3 0.5 10
下载: 导出CSV
-
[1] 刘磊. 航天器主动隔振及精确定向控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2011.LIU L. Research on active vibration isolation and precision pointing control for spacecraft[D]. Harbin: Harbin Institute of Technology, 2011(in Chinese). [2] 柏林. 三轴稳定卫星姿态确定和姿态控制系统研究[D]. 西安: 西北工业大学, 2001.BAI L. Research on attitude control system of three-axis stabilized satallite[D]. Xi’an: Northwestern Polytechnical University, 2001(in Chinese). [3] 张洪华, 王芳, 胡锦昌, 等. 欠驱动挠性航天器的全姿态控制[J]. 宇航学报, 2015, 36(4): 419-429.ZHANG H H, WANG F, HU J C, et al. All-attitude control for underactuated flexible spacecraft[J]. Journal of Astronautics, 2015, 36(4): 419-429(in Chinese). [4] 于开平, 焦健, 吴迎. 基于并联平台的卫星微振动控制研究进展[J]. 力学与实践, 2017, 39(3): 219-225.YU K P, JIAO J, WU Y. Recent progress of satellite micro-vibration control based on the parallel platform[J]. Mechanics in Engineering, 2017, 39(3): 219-225(in Chinese). [5] 罗婕, 檀傈锰, 罗敏, 等. 卫星载荷隔振装置特性的微振动试验及分析[J]. 振动、测试与诊断, 2019, 39(3): 659-664.LUO J, TAN L M, LUO M, et al. Micro-vibration experiment and analysis on characteristic of satellite payload isolation device[J]. Journal of Vibration, Measurement & Diagnosis, 2019, 39(3): 659-664(in Chinese). [6] 孟光, 董瑶海, 周徐斌, 等. 风云四号卫星微振动抑制和试验技术研究[J]. 中国科学: 物理学 力学 天文学, 2019, 49(2): 70-80.MENG G, DONG Y H, ZHOU X B, et al. Research on micro-vibration control and testing of FY-4 meteorological satellite[J]. Scientia Sinica (Physica, Mechanica & Astronomica), 2019, 49(2): 70-80(in Chinese). [7] 舒适, 房建成, 张伟, 等. 基于MSCMG大型遥感卫星高精度姿态控制方法[J]. 中国惯性技术学报, 2017, 25(4): 421-431.SHU S, FANG J C, ZHANG W, et al. High-precision attitude control method based on MSCMG for large-scale remote sensing satellite[J]. Journal of Chinese Inertial Technology, 2017, 25(4): 421-431(in Chinese). [8] 魏彤, 房建成. 磁悬浮控制力矩陀螺磁轴承的变工作点线性化自适应控制方法[J]. 机械工程学报, 2007, 43(6): 110-115.WEI T, FANG J C. Adaptive control based on variant operating-point linearization in magnetic bearings of MSCMG[J]. Chinese Journal of Mechanical Engineering, 2007, 43(6): 110-115(in Chinese). [9] JONES D I, OWENS A R, OWEN R G. A control system for a microgravity isolation mount[J]. IEEE Transactions on Control Systems Technology, 1996, 4(4): 313-325. [10] LASKIN R A, SIRLIN S W. Future payload isolation and pointing system technology[J]. Journal of Guidance, Control, and Dynamics, 1986, 9(4): 469-477. [11] PEDREIRO N. Spacecraft architecture for disturbance-free payload[J]. Journal of Guidance, Control, and Dynamics, 2003, 26(5): 794-804. [12] CHEN C C, HEMMATI H, BISWAS A, et al. Simplified lasercom system architecture using a disturbance-free platform[C]//Proceedings of the Free-Space Laser Communication Technologies XVIII. Bellinham: SPIE, 2006: 610505. [13] DEWELL L D, BELL R M, TAJDARAN K, et al. Dynamic stability with the disturbance-free payload architecture as applied to the Large UV/Optical/Infrared (LUVOIR) mission[C]//Proceedings of the UV/Optical/IR Space Telescopes and Instruments: Innovative Technologies and Concepts VIII. Bellinham: SPIE, 2017: 12. [14] 王俊. 扰动隔离载荷与卫星平台一体化控制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.WANG J. Integrated control for disturbance-free payload and satellite platform[D]. Harbin: Harbin Institute of Technology, 2016(in Chinese). [15] 屠善澄. 卫星姿态动力学与控制[M]. 北京: 宇航出版社, 2001.TU S C. Satellite attitude dynamics and control[M]. Beijing: China Astronautics Publishing House, 2001(in Chinese). [16] 王京发. 卫星振动隔离系统的隔振与控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2014.WANG J F. The study of isolation and control for the vibration isolation system of the satellite[D]. Harbin: Harbin Institute of Technology, 2014(in Chinese). [17] 张伟, 赵艳彬, 廖鹤, 等. 动静隔离、主从协同控制双超卫星平台设计[J]. 上海航天, 2014, 31(5): 7-11.ZHANG W, ZHAO Y B, LIAO H, et al. Design of an active-quiet isolated and master-slave coordination controlled dual-super satellite platform[J]. Aerospace Shanghai, 2014, 31(5): 7-11(in Chinese). [18] 赵同爽, 张激扬, 王英广, 等. 磁悬浮旋转关节建模及解耦控制方法研究[J]. 空间控制技术与应用, 2022, 48(2): 71-79.ZHAO T S, ZHANG J Y, WANG Y G, et al. Modeling and decoupling control method of magnetically levitated rotary joints[J]. Aerospace Control and Application, 2022, 48(2): 71-79(in Chinese). [19] 刘钢, 李圣怡, 范大鹏. 机电伺服系统的预测函数控制算法研究[J]. 国防科技大学学报, 2004, 26(2): 89-93.LIU G, LI S Y, FAN D P. Studies of predictive functional control arithmetic in electromechanical servo system[J]. Journal of National University of Defense Technology, 2004, 26(2): 89-93(in Chinese). [20] 韩京清. 从PID技术到 “自抗扰控制” 技术[J]. 控制工程, 2002, 9(3): 13-18.HAN J Q. From PID technique to active disturbances rejection control technique[J]. Control Engineering of China, 2002, 9(3): 13-18(in Chinese). [21] BASARAN S, SIVRIOGLU S. Novel repulsive magnetic bearing flywheel system with composite adaptive control[J]. IET Electric Power Applications, 2019, 13(5): 676-685. [22] TAO C W, TAUR J S, CHEN Y C. Design of a parallel distributed fuzzy LQR controller for the twin rotor multi-input multi-output system[J]. Fuzzy Sets and Systems, 2010, 161(15): 2081-2103. [23] 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2005.LIU J K. MATLAB simulation for sliding mode control[M]. Beijing: Tsinghua University Press, 2005(in Chinese). [24] 王丰尧. 滑模变结构控制[M]. 北京: 机械工业出版社, 1995.WANG F Y. Sliding mode variable structure control[M]. Beijing: China Machine Press, 1995(in Chinese). [25] 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23.HAN J Q. Auto-disturbances-rejection controller and its applications[J]. Control and Decision, 1998, 13(1): 19-23(in Chinese). [26] 魏永清, 许江宁, 马恒. 自抗扰控制器在陀螺稳定平台控制系统中的应用[J]. 电机与控制学报, 2017, 21(1): 39-44.WEI Y Q, XU J N, MA H. Application of active disturbance rejection controller in gyro-stabilized platform control system[J]. Electric Machines and Control, 2017, 21(1): 39-44(in Chinese). [27] LUO S Z, SUN Q L, SUN M W, et al. On decoupling trajectory tracking control of unmanned powered parafoil using ADRC-based coupling analysis and dynamic feedforward compensation[J]. Nonlinear Dynamics, 2018, 92(4): 1619-1635. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 188
- HTML全文浏览量: 114
- PDF下载量: 14
- 被引次数: 0
