



-
摘要:
主动侧杆系统存在的多余力问题造成了“抖杆打手”、态势感知差、特殊情况下易诱发飞行事故等问题。为更好地分析多余力的作用机理,确定系统参数对多余力的影响机理及规律,通过理论分析确定了与系统多余力相关的参数,基于蒙特卡罗仿真详细分析了各参数对系统多余力的影响,开展了多余力频谱分析,进行了各参数的多余力影响敏感性分析。通过定性定量分析确定了对系统多余力影响最大的因素,即驾驶员操纵频率、侧杆等效转动惯量、侧杆等效阻尼、转速传感器信号偏置、力矩传感器信号偏置,并分析了各参数对多余力的影响机理和程度,为主动侧杆系统多余力抑制方法设计和符合性验证研究提供了参考依据。
Abstract:In the active sidestick system, there is a problem of surplus force, which causes problems such as ‘jigging rod beater’, poor situational awareness, and easy to induce flight accidents under special circumstances. The parameters associated with the surplus force of the system were first identified through theoretical analysis. The influence of each parameter on the surplus force of the system was then thoroughly examined through Monte Carlo simulation. Based on the results of the Monte Carlo simulation, the spectrum analysis of the surplus force and the sensitivity analysis of the influence of the surplus force of each parameter were conducted in order to better understand the mechanism of the surplus force and determine the influence mechanism and law of the system parameters on the surplus force. The driver’s control frequency, the equivalent inertia of the sidestick, the equivalent damping of the sidestick, the signal bias of the speed sensor, and the signal bias of the torque sensor are among the factors that have the biggest effects on the surplus force of the system. The degree to which each parameter influences the surplus force is determined through qualitative and quantitative analysis, which serves as a guide for the design and compliance verification method of the surplus force suppression method of the active sidestick system.
-
Key words:
- active sidestick /
- surplus force /
- Monte Carlo simulation /
- sensitivity analysis /
- servosystem
-
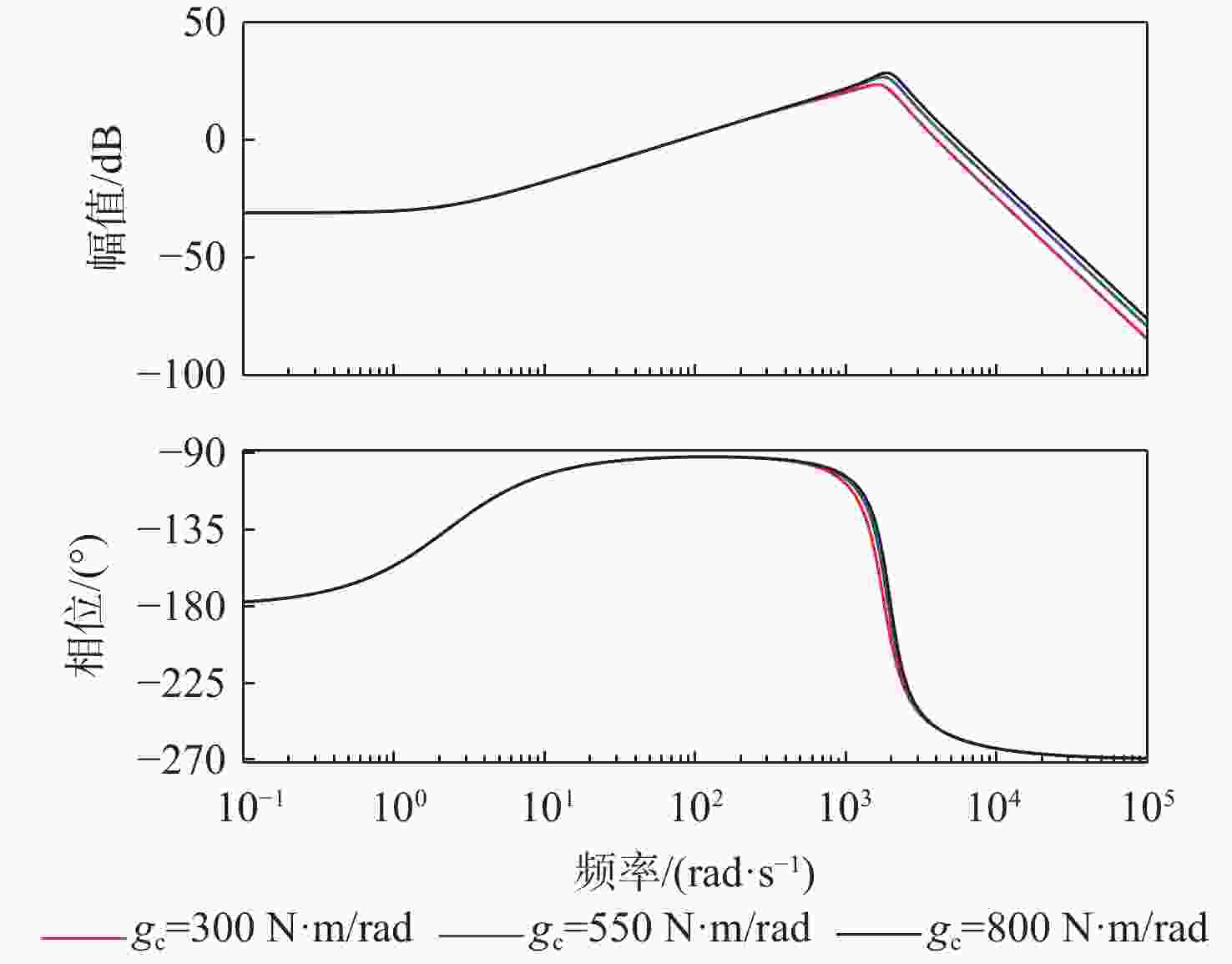
图 6 扭转刚度对系统性能影响Bode图
Figure 6. Bode diagram of effect of torsional stiffness on system performance
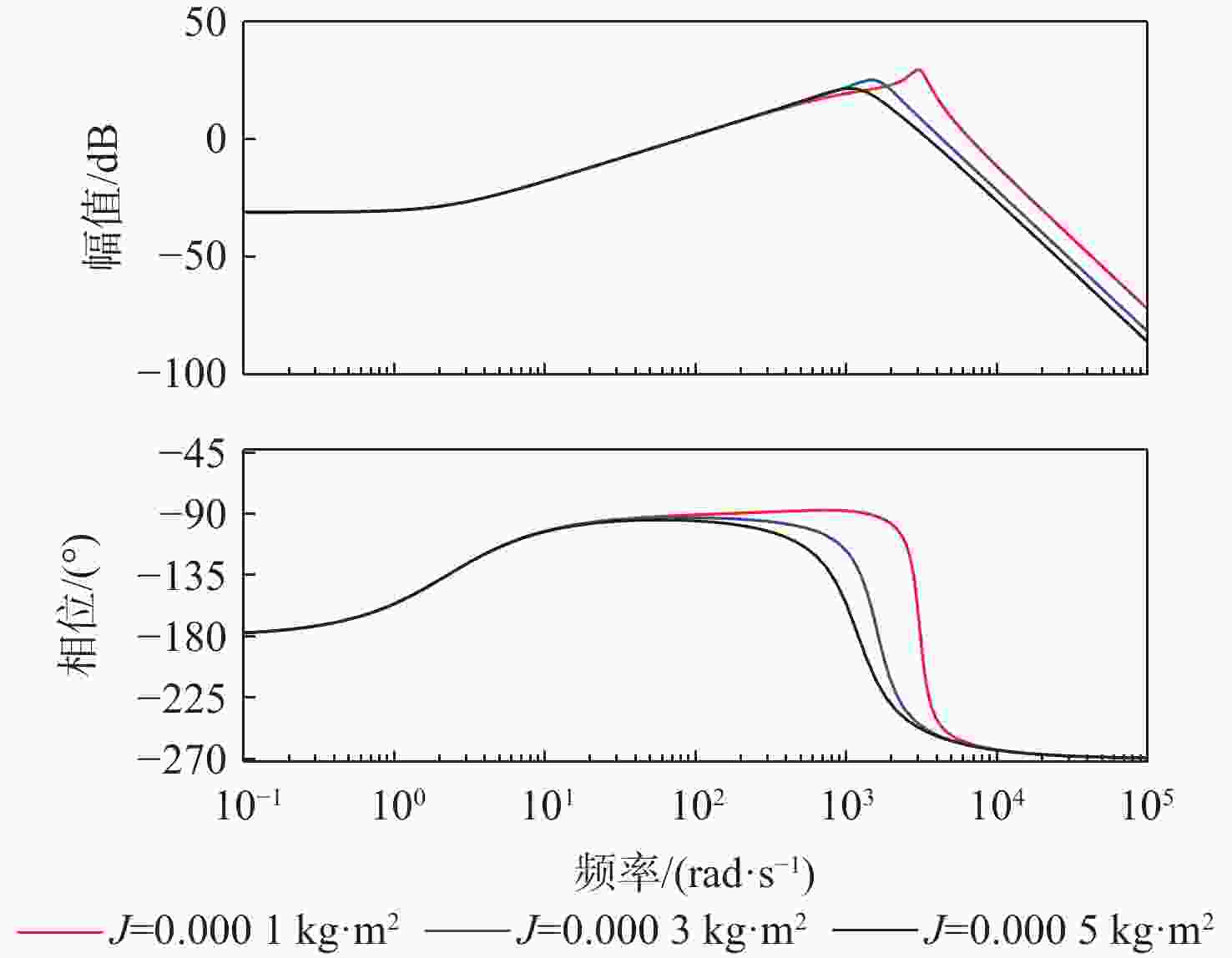
图 7 电机转子转动惯量对系统性能影响Bode图
Figure 7. Bode diagram of effect of motor rotor moment of inertia on system performance
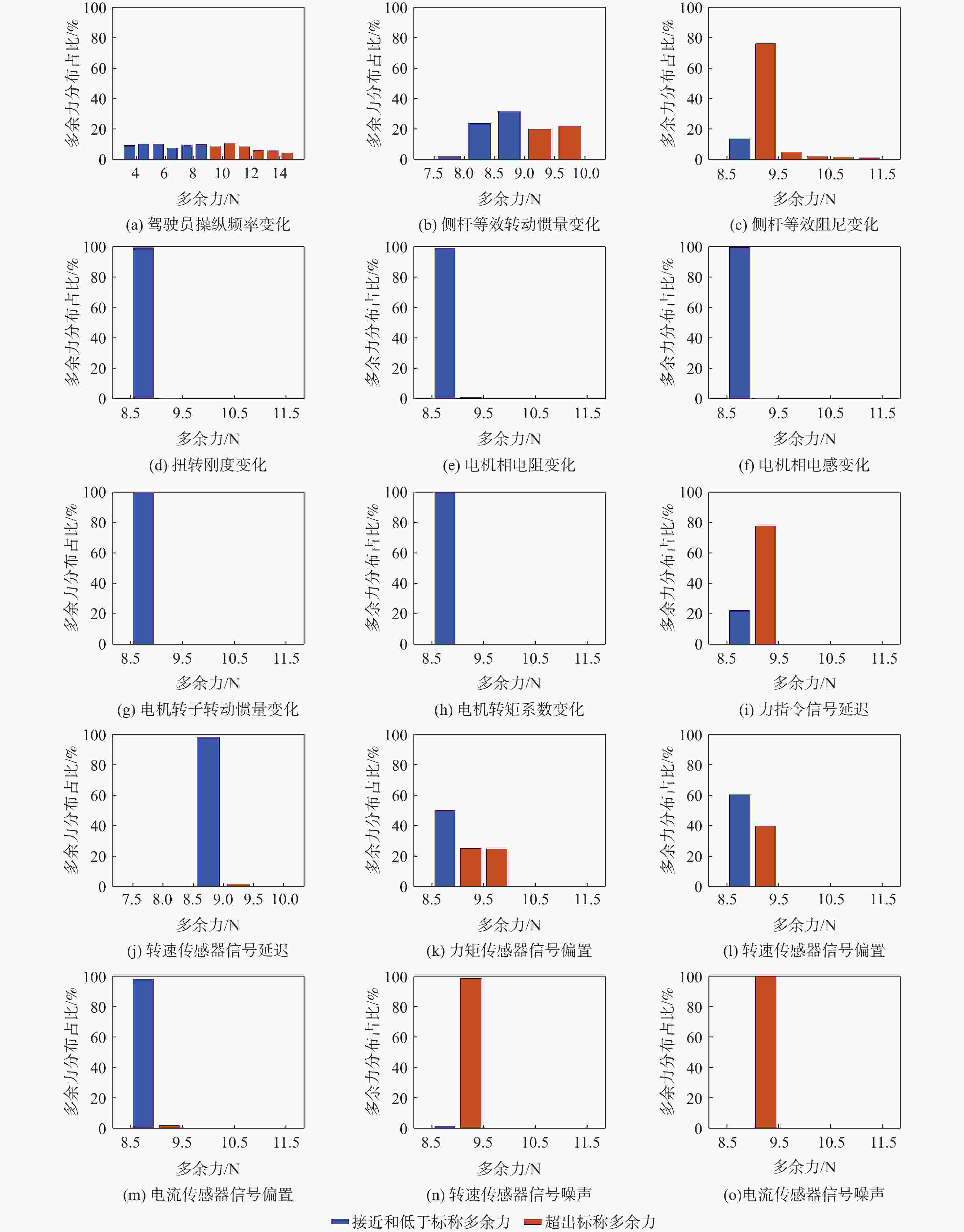
图 8 参数对多余力分布占比的影响
Figure 8. Influence of parameters on distribution proportion of surplus force
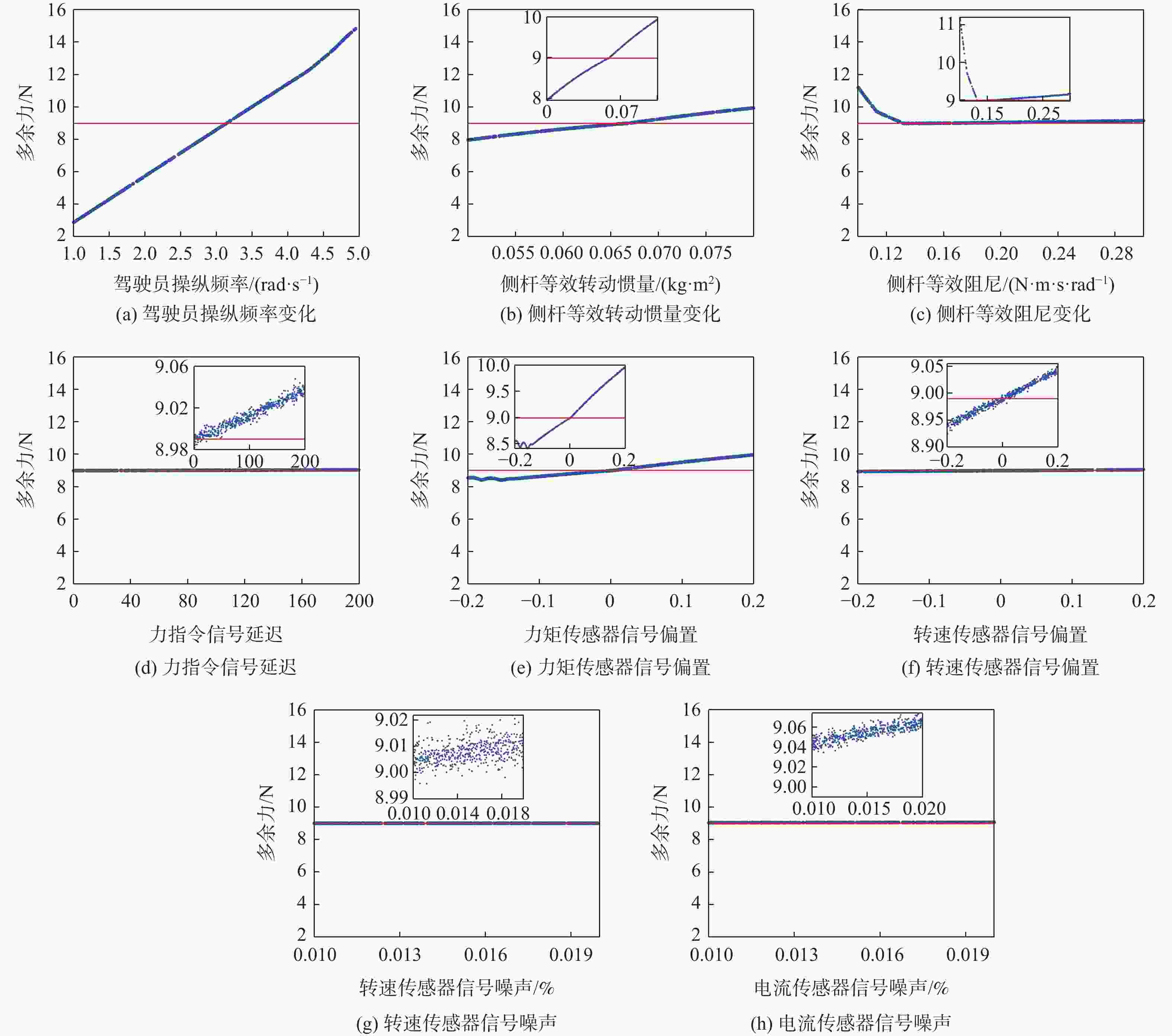
图 10 单参数变化时多余力分布散点图
Figure 10. Surplus force distribution scatter plot under single parameter variation
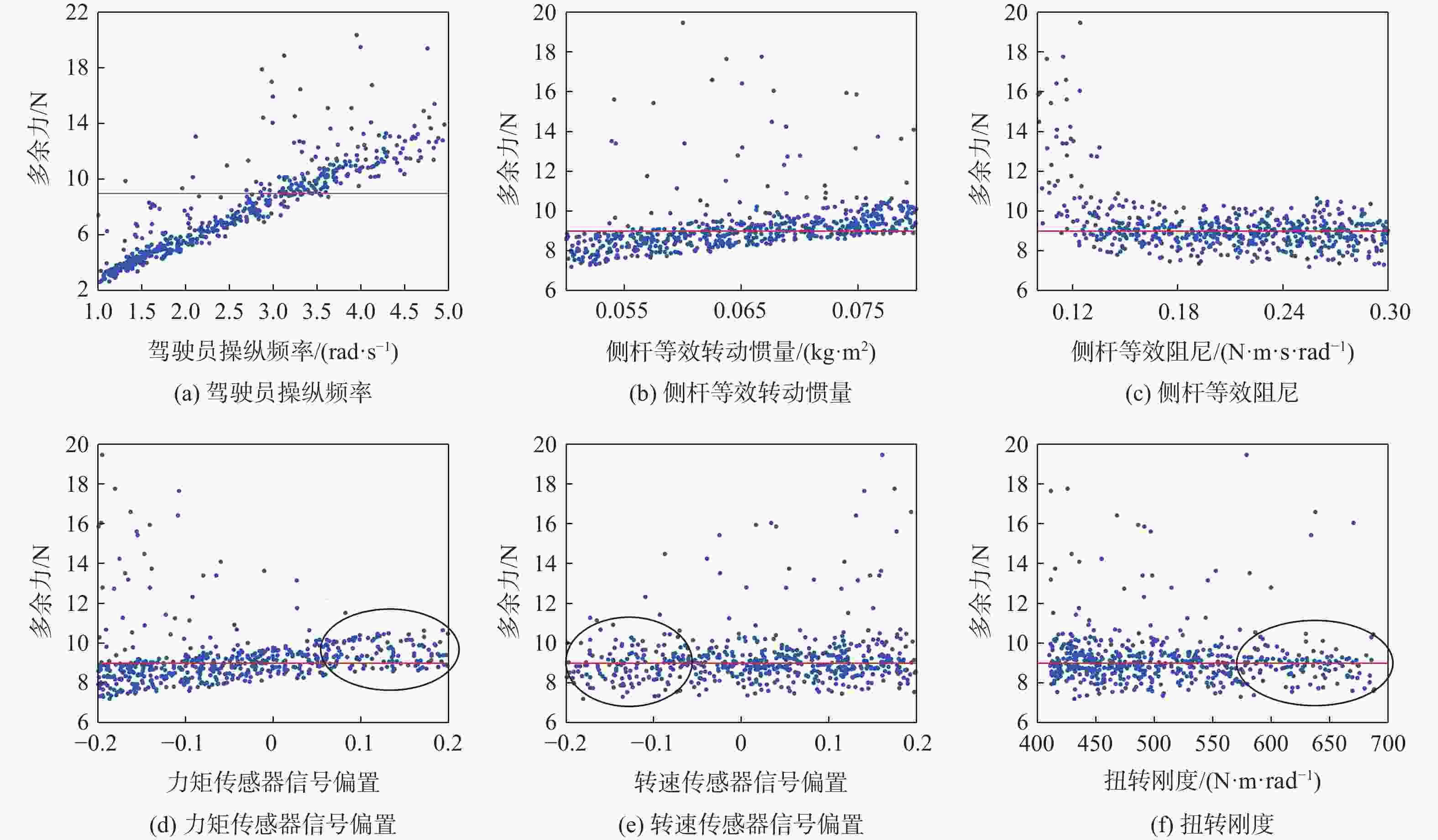
图 11 多参数变化时多余力分布散点图
Figure 11. Surplus force distribution scatter plot under multi-parameter variation
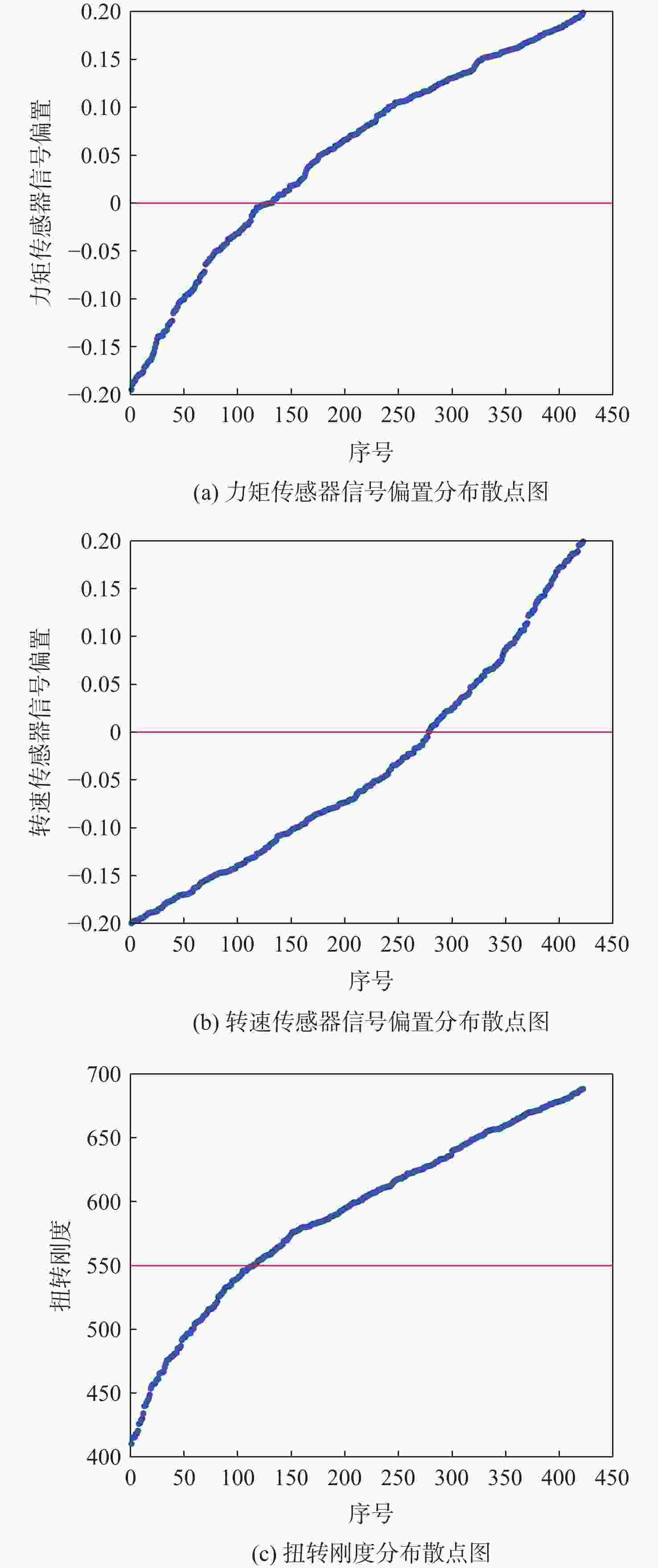
图 13 故障情况影响参数分布散点图
Figure 13. Fault condition affects parameter distribution scatter plot
参数 数值 电机相电阻$ {R} $/$ \Omega $ 1.3 电机相电感$ L $/$ {\mathrm{mH}} $ 1.175 永磁体磁链$ {\psi }_{{\mathrm{f}}} $/$ {\mathrm{Wb}} $ 0.0333 电机极对数$ {p}_{{\mathrm{n}}} $ 20 电机转子转动惯量$ J $/($ {{\mathrm{kg\cdot {m}^{2}}}} $) 0.000231 扭转刚度$ {g}_{{\mathrm{c}}} $/($ {{\mathrm{N\cdot m}}} \cdot {\mathrm{rad}}^{-1}$) 550 齿轮减速比$ i $ 8 侧杆长度$ l $/m 0.15  下载: 导出CSV
下载: 导出CSV
分类 影响多余力的因素 表现形式 驾驶员指令 驾驶员操纵频率 操纵频率在0~5 rad/s变化 传动装置 侧杆等效转动惯量 等效转动惯量有20%的偏差 侧杆等效阻尼 等效阻尼有30%的偏差 扭转刚度 扭转刚度有25%的偏差 电机参数 电机相电阻 相电阻有30%的误差 电机相电感 相电感有10%的误差 电机转子转动惯量 转子转动惯量有10%的误差 电机转矩系数 转矩系数有6%的差异 传感器、控制器 力指令信号延迟 力指令信号延迟2% 力矩传感器信号延迟 力矩传感器信号延迟0.5% 转速传感器信号延迟 转速传感器信号延迟0.5% 力矩传感器信号偏置 力矩传感器信号偏置20% 转速传感器信号偏置 转速传感器信号偏置20% 电流传感器信号偏置 电流传感器信号偏置20% 转速传感器信号噪声 向转速传感器注入2%、频率为50 Hz的白噪声 电流传感器信号噪声 向电流传感器注入2%、频率为50 Hz的白噪声
下载: 导出CSV
表 3 多余力频谱仿真结果
Table 3. Spectrum simulation results of surplus force
参数 主频率/Hz 主频率幅值 THD/% 电流传感器信号噪声 5.7 6.418 12.85 力矩传感器信号偏置 5.18 6.444 20.07 电机转矩系数 5.7 6.742 10.94 转速传感器信号噪声 5.7 6.747 11.09 扭转刚度 5.7 6.782 10.70 转速传感器信号延迟 5.7 6.784 10.67 电机相电阻 5.7 6.784 10.69 电机相电感 5.7 6.784 10.69 电机转子转动惯量 5.7 6.8 10.56 电流传感器信号偏置 5.7 6.924 9.88 力指令信号延迟 5.7 7.543 6.73 转速传感器信号偏置 5.7 7.722 5.93 侧杆等效转动惯量 5.18 7.724 12.97 侧杆等效阻尼 5.7 9.648 4.91 驾驶员操纵频率 5.7 10.68 10.55 注:正常情况下,主频率为5.7 Hz,主频率幅值为6.933,THD为9.70%。
下载: 导出CSV
表 4 参数敏感性
Table 4. Parameter sensitivity
参数 敏感度 敏感区间 驾驶员操纵频率 305.526 All 侧杆等效转动惯量 303.347 All 侧杆等效阻尼 241.265 0.101~0.133 力矩传感器信号偏置 12.576 −0.15~0.2 转速传感器信号偏置 0.2759 All 电流传感器信号噪声 0.1832 All 转速传感器信号噪声 0.1075 All 力指令信号延迟 0.0942 All
下载: 导出CSV
-
[1] YAO Z Y, YANG X Z, QIU X Y. Research and design of the control law of passive side-stick system with human factor fault[J]. IOP Conference Series: Materials Science and Engineering, 2020, 751(1): 012014. [2] FU W, VAN PAASSEN M M, MULDER M. Developing active manipulators in aircraft flight control[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(8): 1755-1767. [3] LIANG Q X L, LIU S Q, LU Z R, et al. Adaptive sliding mode based servo tracking control of aircrafts’ active inceptor control systems[J]. Journal of Aeronautics, Astronautics and Aviation, Series A, 2017, 49: 385-396. [4] 孟小宝, 邹泉, 何欢欢, 等. 安装主动侧杆的飞机的人机交互控制系统研究[J]. 航空科学技术, 2023, 34(8): 57-67.MENG X B, ZOU Q, HE H H, et al. Study on the human-machine interaction control system of aircraft equipped with active side stick[J]. Aeronautical Science & Technology, 2023, 34(8): 57-67(in Chinese). [5] SAE International. Aerospace active inceptor systems for aircraft flight and engine controls[R]. Warrendale: SAE International, 2018. [6] CHEN H X, SHEN D K, YANG X. Effects of mechanical properties of electric loading system on surplus torque[C]//Proceedings of the IEEE Chinese Guidance, Navigation and Control Conference. Piscataway: IEEE Press, 2017: 913-917. [7] 陈悦. 飞机主动侧杆高精度杆力控制研究[D]. 南京: 南京航空航天大学, 2020.CHEN Y. Research on high accuracy force control of aircraft active side-stick[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020(in Chinese). [8] 张旭. 高性能主动侧杆控制方法研究与实现[D]. 南京: 南京航空航天大学, 2021.ZHANG X. Research and implementation of high performance active side-stick control method[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021(in Chinese). [9] ZHOU Y J, LIU J, WANG Q Y, et al. Mixed sensitivity servo control of active control systems[J]. Machines, 2022, 10(10): 842. [10] 孙晓哲, 侯东, 杨建忠. 双余度机电作动器力纷争机理及敏感性[J]. 航空学报, 2023, 44(增刊1): 727661.SUN X Z, HOU D, YANG J Z. Mechanism and sensitivity of force fight in dual redundant electromechanical actuators[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(Sup 1): 727661(in Chinese). [11] FELLAH K, GUIATNI M, OURNID A K, et al. Fuzzy-PID side-stick force control for flight simulation[J]. The Aeronautical Journal, 2016, 120(1227): 845-872. [12] ZHOU G R, LIU S Q, SANG Y J, et al. LPV robust servo control of aircraft active side-sticks[J]. Aircraft Engineering and Aerospace Technology, 2020, 92(4): 599-609. [13] ZHOU K, AI M, SUN Y C, et al. PMSM vector control strategy based on active disturbance rejection controller[J]. Energies, 2019, 12(20): 3827. [14] 王志刚, 李锋, 姚李阳, 等. 主动操纵装置电机伺服控制方法研究[J]. 飞机设计, 2020, 40(5): 4-7.WANG Z G, LI F, YAO L Y, et al. Research on servo motor control method of active control device[J]. Aircraft Design, 2020, 40(5): 4-7(in Chinese). [15] 贾会栋. 飞机主动杆结构设计及控制策略研究[D]. 大连: 大连理工大学, 2019.JIA H D. Research on structural design and control strategy of aircraft active side-stick[D]. Dalian: Dalian University of Technology, 2019(in Chinese). [16] XUE H J, WU H G, ZHANG X Y. Analysis of friction effect ondynamic characteristics of artificial feel system[J]. Applied Mechanics and Materials, 2013, 401-403: 460-464. [17] 王灿, 杨忠, 陈旭, 等. 飞机主动侧杆非线性系统的建模与控制[J]. 应用科技, 2023, 50(5): 157-162.WANG C, YANG Z, CHEN X, et al. Modeling and control of nonlinear system of aircraft active sidestick[J]. Applied Science and Technology, 2023, 50(5): 157-162(in Chinese). [18] 陈致君, 张诚, 朱姝姝, 等. 飞机主动侧杆的弹簧-阻尼系统力矩控制策略[J]. 飞控与探测, 2023, 6(1): 32-40.CHEN Z J, ZHANG C, ZHU S S, et al. Torque control for spring-damping system of aircraft active side-stick[J]. Flight Control & Detection, 2023, 6(1): 32-40(in Chinese). [19] 吴昊, 孙永荣, 孙旭东, 等. 基于MPC算法的飞机主动侧杆杆力控制研究[J]. 机械与电子, 2023, 41(8): 33-38.WU H, SUN Y R, SUN X D, et al. Research on stick force control of active side stick based on MPC algorithm[J]. Machinery & Electronics, 2023, 41(8): 33-38(in Chinese). [20] ZILINU H, LU Z R. On active sidestick force control strategy technology[C]//Proceedings of the IEEE CSAA Guidance, Navigation and Control Conference. Piscataway: IEEE Press, 2020: 1-5. [21] CHEN Y D, SHAN L, SUN J F, et al. Surplus torque research on electric motor loading simulator using active disturbance rejection controller[C]//Proceedings of the 29th Chinese Control and Decision Conference. Piscataway: IEEE Press, 2017: 5124-5130. [22] 郑国. 基于改进PSO-PID的电动负载模拟器关键技术研究[D]. 太远: 中北大学, 2023.ZHENG G. Research on key technologies of electric load simulator based on improved PSO-PID[D]. Taiyuan: North University of China, 2023(in Chinese). [23] CHEN Y Q, MA J, FANG Y. Mechanism modeling and analysis of surplus torque in aeroload simulator[J]. International Journal of Modeling, Simulation, and Scientific Computing, 2015, 6(1): 1550005. [24] 何晶晶, 高亚奎, 张家盛. 液压伺服作动系统力纷争敏感度及机理研究[J]. 测控技术, 2018, 37(10): 39-43.HE J J, GAO Y K, ZHANG J S. Sensitivity and mechanism for force fighting of servo-hydraulic actuation system[J]. Measurement & Control Technology, 2018, 37(10): 39-43(in Chinese). [25] 陈宇青. 电动负载力矩模拟器多余力矩产生机理及抑制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2015.CHEN Y Q. Research on the mechanism of excess torque in electric load torque simulator and its suppression method[D]. Harbin: Harbin Institute of Technology, 2015(in Chinese). [26] ZAICHIK L E, YASHIN Y P, DESYATNIK P A, et al. Handling quality of aircraft equipped with sidesticks: AIAA 2014-2589[R]. Reston: AIAA, 2014. -

 下载:
下载:













 点击查看大图
点击查看大图

计量
- 文章访问数: 72
- HTML全文浏览量: 20
- PDF下载量: 66
- 被引次数: 0
