



Dynamic model of high confidence tilt-hinge rotor based on Newton-Euler recursion algorithm
-
摘要:
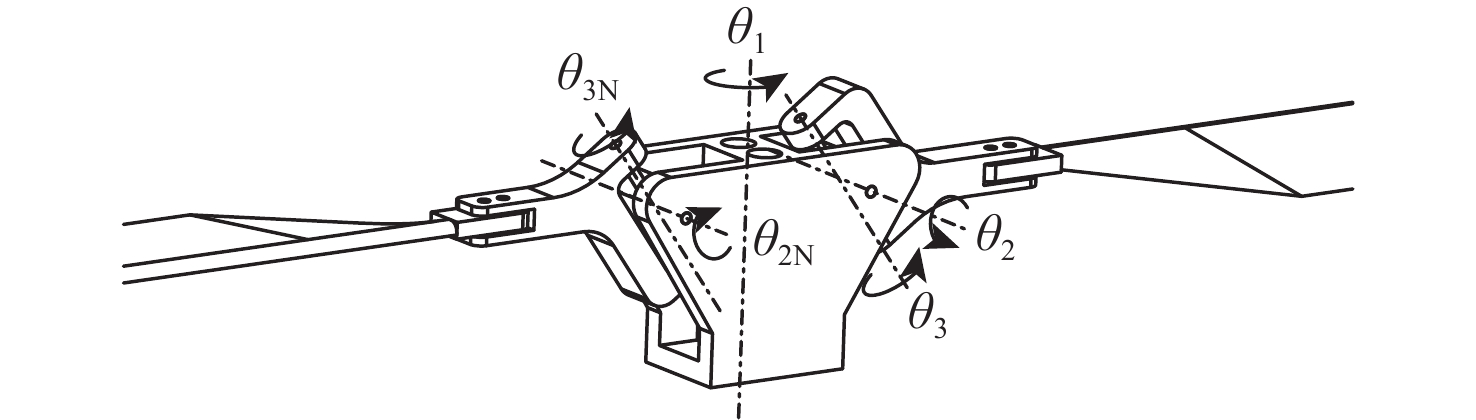
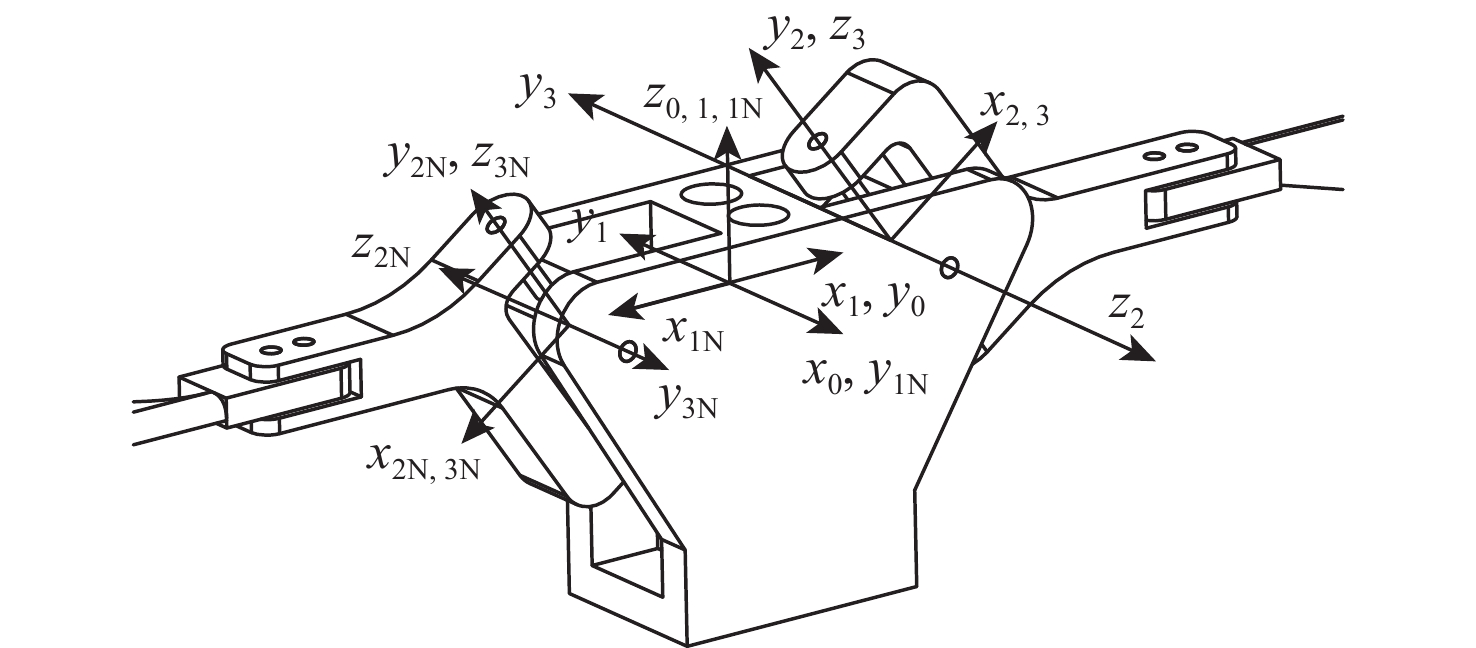
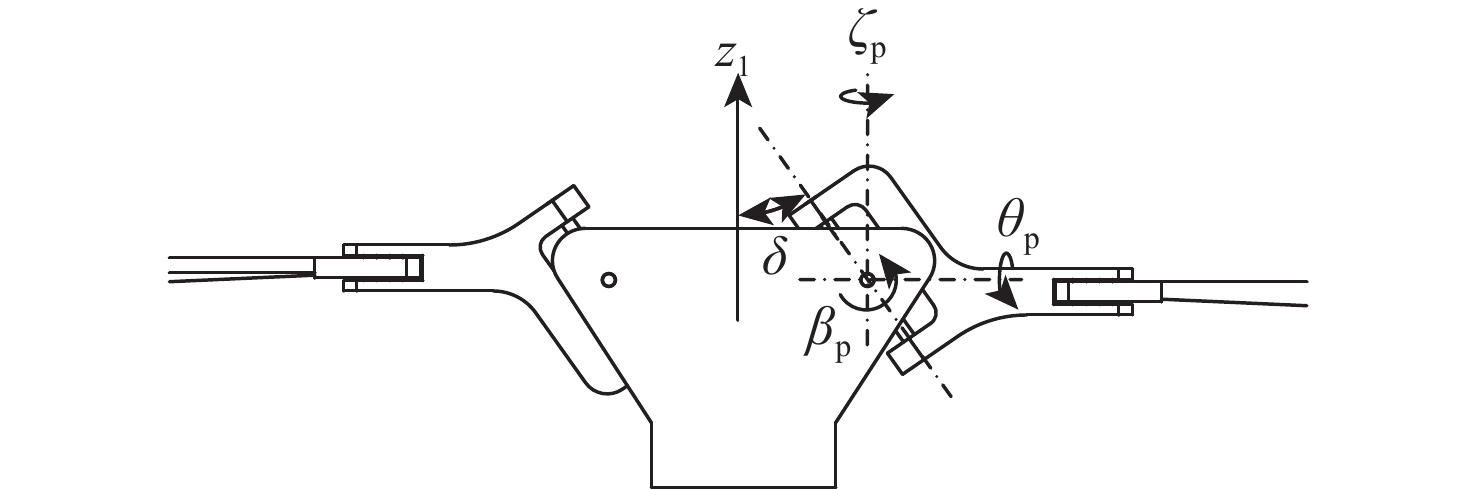
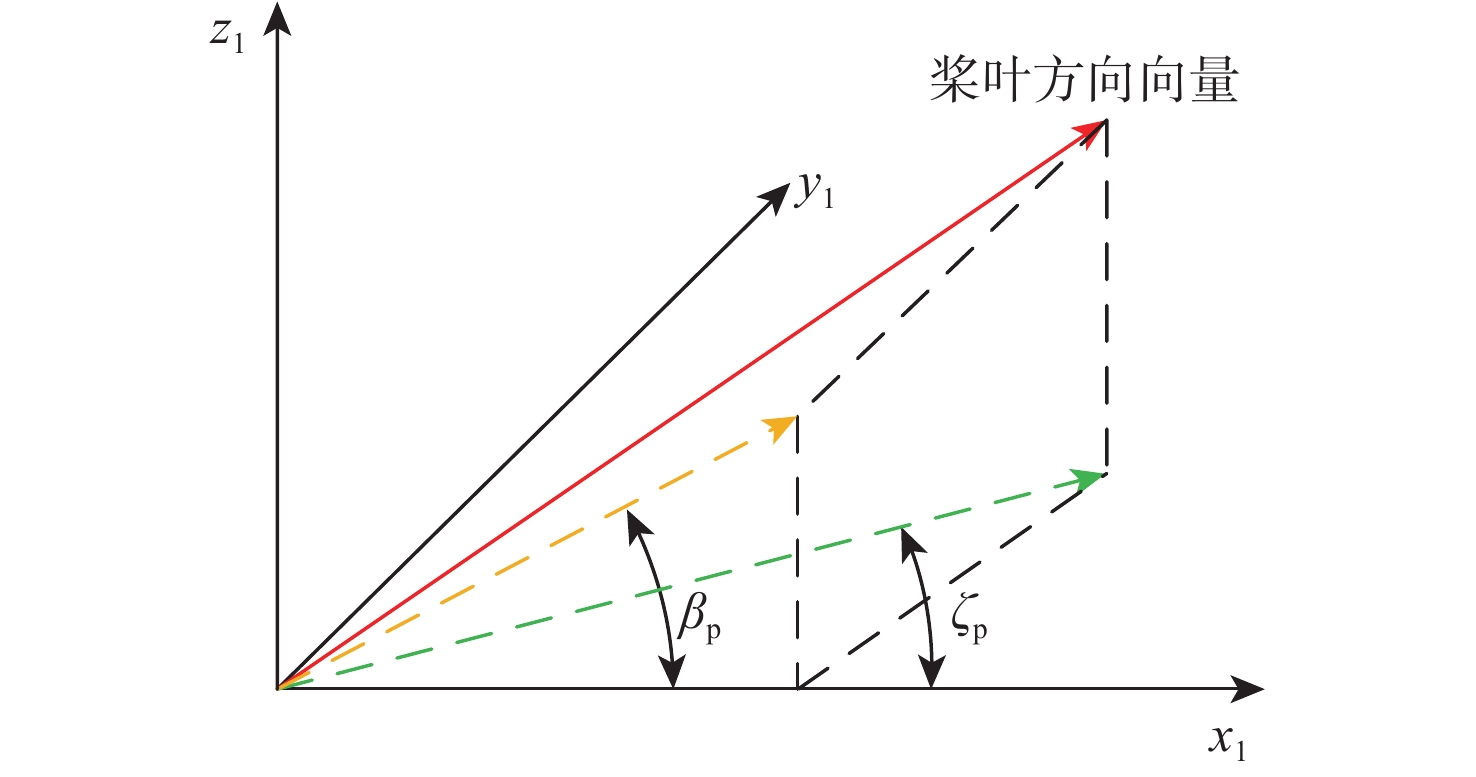
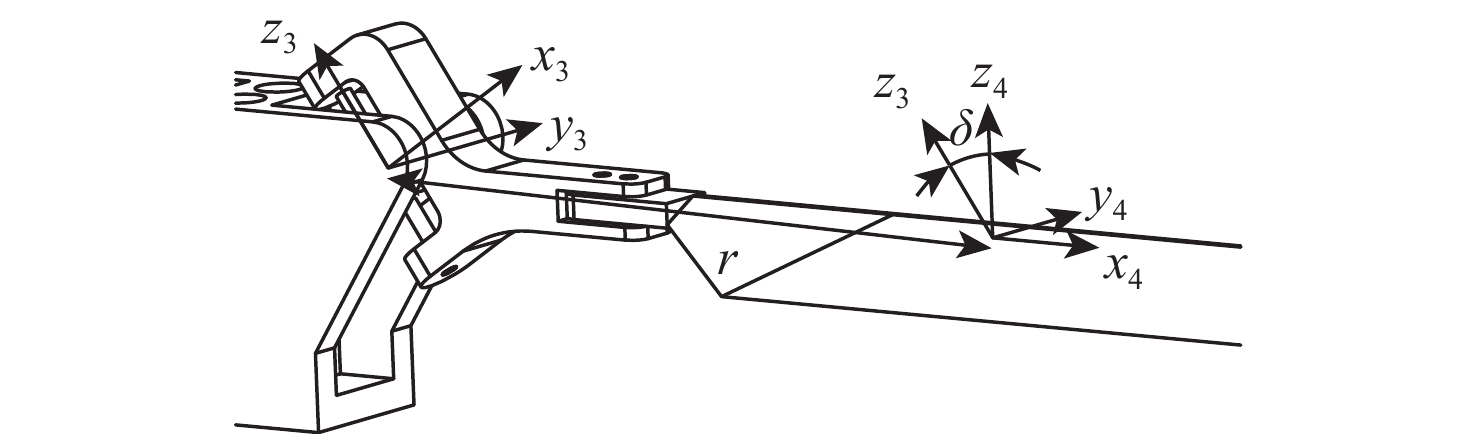
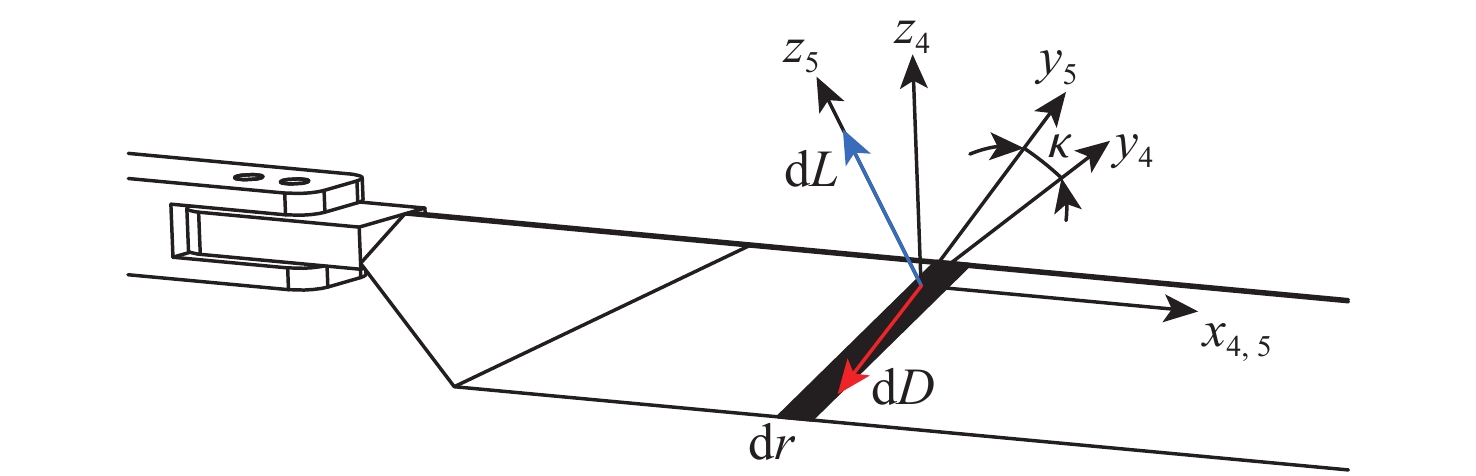
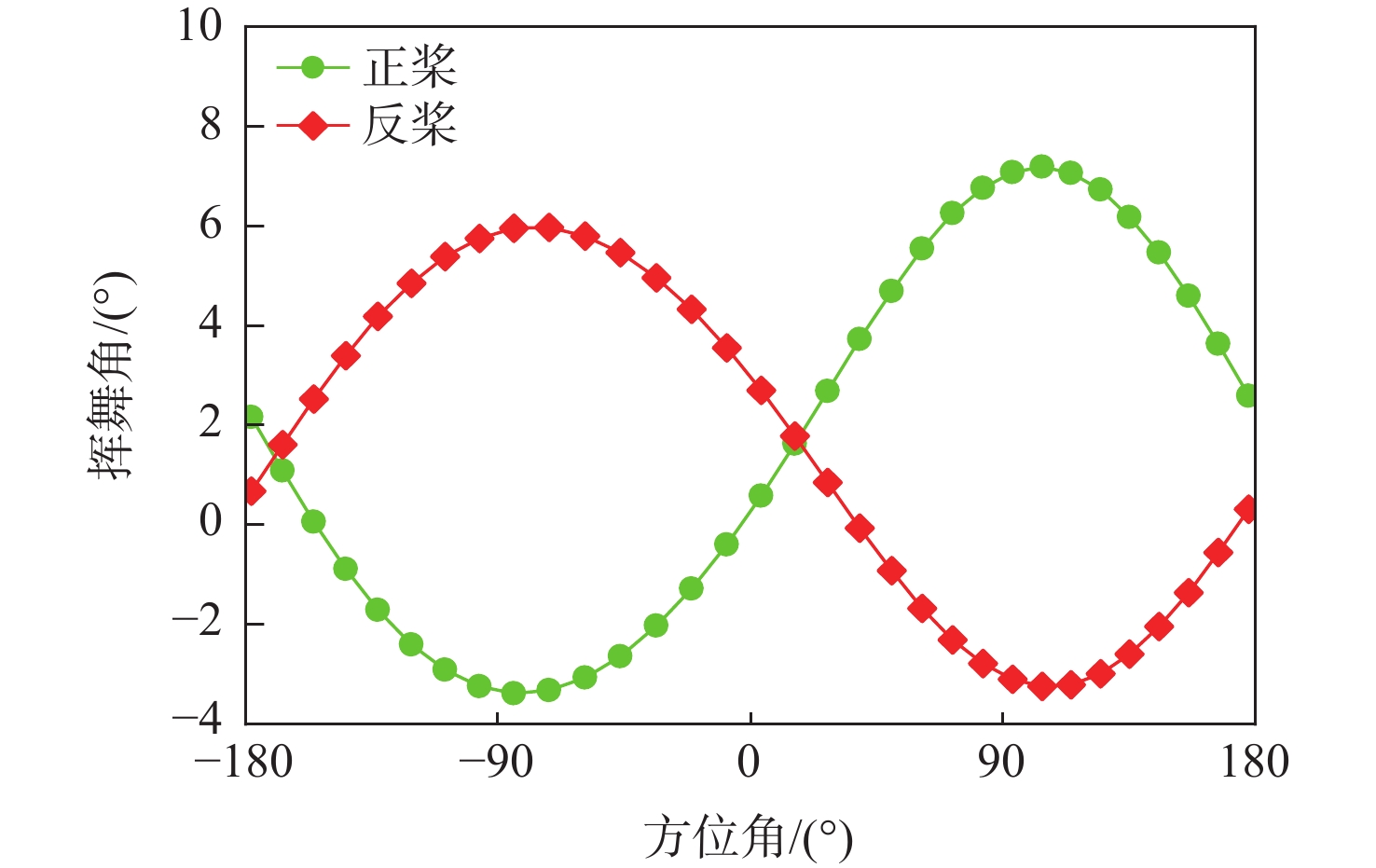
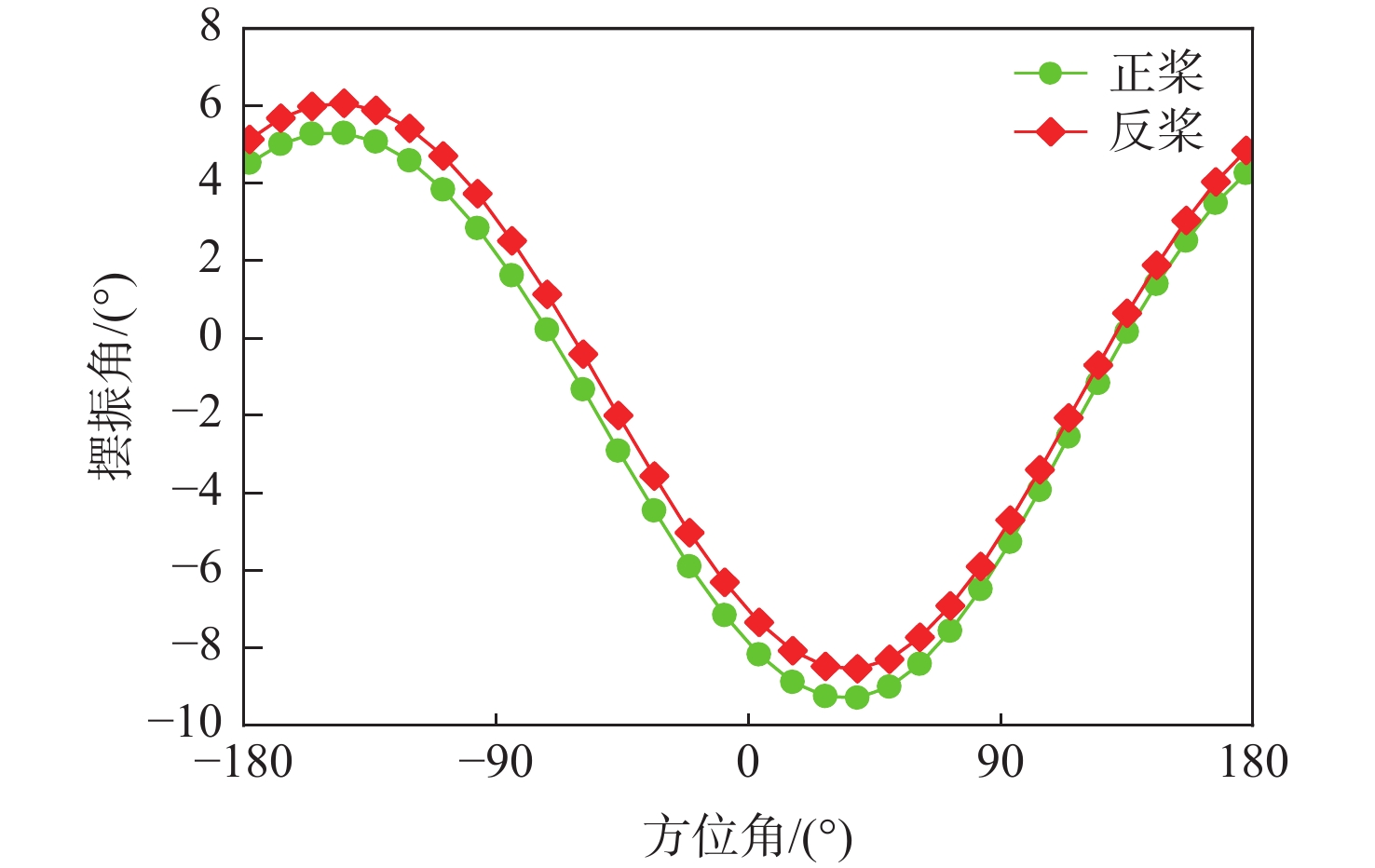
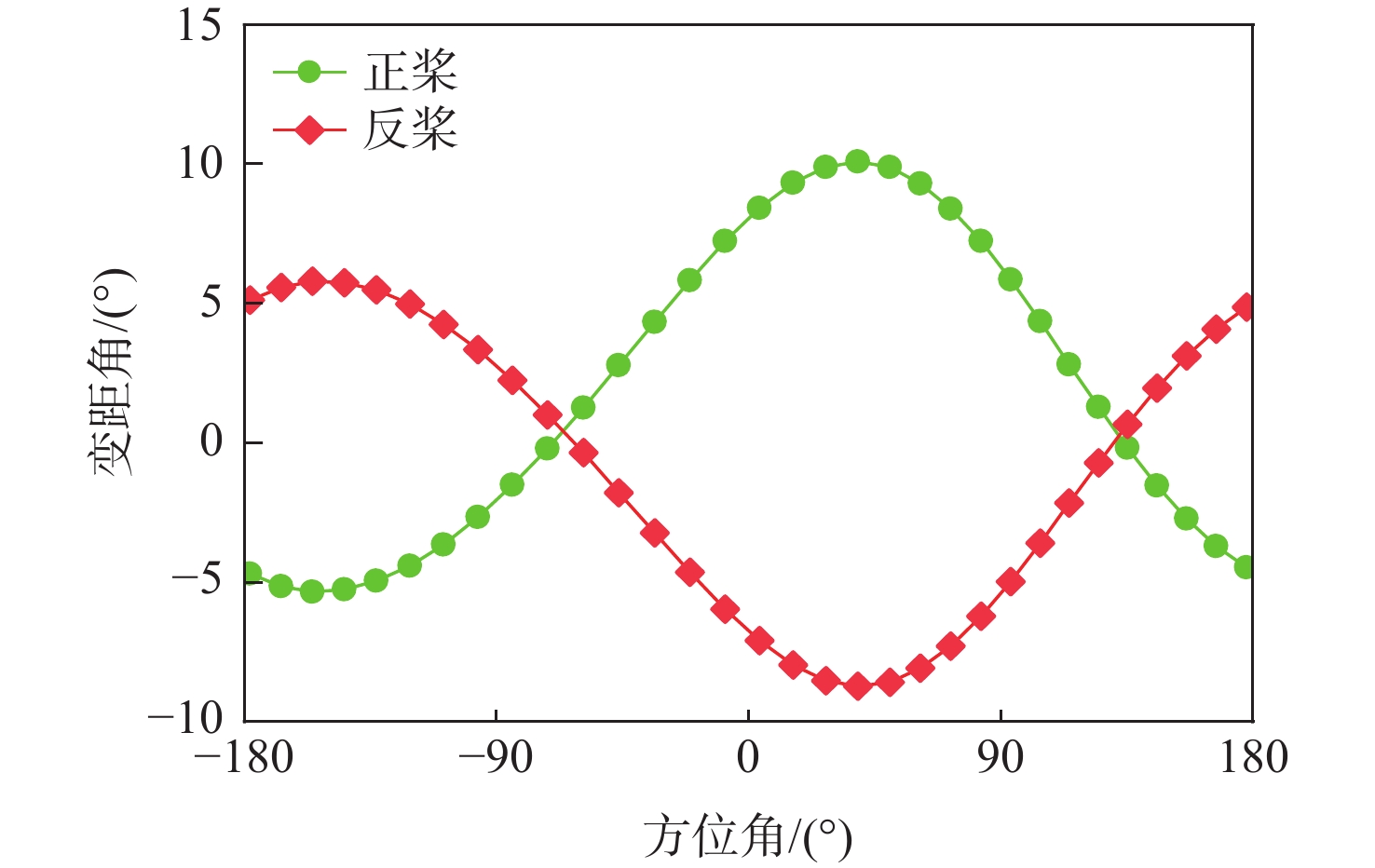
斜铰旋翼无需自动倾斜器,仅通过电机加减速变化就能实现周期变距操控,结构复杂性低,但引入斜铰后,旋翼摆振、变距相耦合,使斜铰旋翼动力学建模更加复杂。针对现有建模方法中正、反桨叶间挥舞差异揭示不充分、模型预测精度不高的问题,基于改进的Denavia-Hartenberg方法建立桨叶局部连杆坐标系,采用牛顿-欧拉递推动力学算法,在局部连杆坐标系下,对斜铰旋翼连杆系统向外递推计算各连杆的速度和加速度,向内递推计算各连杆间的相互作用力、力矩,构建斜铰旋翼动力学模型。在此基础上,通过仿真计算,进一步揭示了斜铰旋翼周期变距机理。计算结果表明:所提模型可以更加准确地预测正、反桨叶间挥舞差异;对于桨叶摆振运动幅值的预测精度提高了9.05%。
Abstract:The tilt-hinge rotor has a simpler structure because it doesn’t need a swashplate and can provide cyclic pitch control just by accelerating and decelerating the motor. However, the tilt hinge coupled with the rotor lag and pitch motion complicates the modeling of rotor dynamics. However, the rotor lag and pitch motion are coupled with the tilt hinge, which makes the rotor dynamics modeling more complicated. The nearby linkage coordinate system of the blade was created based on the enhanced Denavia-Hartenberg approach in order to address the issues of low model prediction accuracy in the current modeling techniques and inadequate disclosure of the difference between forward and reverse blade flap-motion. The Newton-Euler recursion algorithm is used to calculate the velocity and acceleration of each linkage and the interaction force and torque of each linkage in the local linkage coordinate system. The dynamic model of the tilt-hinge rotor is established. On this basis, the mechanism of periodic pitch variation of the tilt-hinge rotor is further revealed through simulation calculation. At the same time, the calculation results show that this model can predict the flapping difference between forward and reverse blades more accurately. The prediction accuracy of blade lagging amplitude is improved by 9.05%.
-
Key words:
- tilt-hinge rotor /
- swashplateless /
- lag-pitch coupling /
- dynamical model /
- cyclic pitch control
-
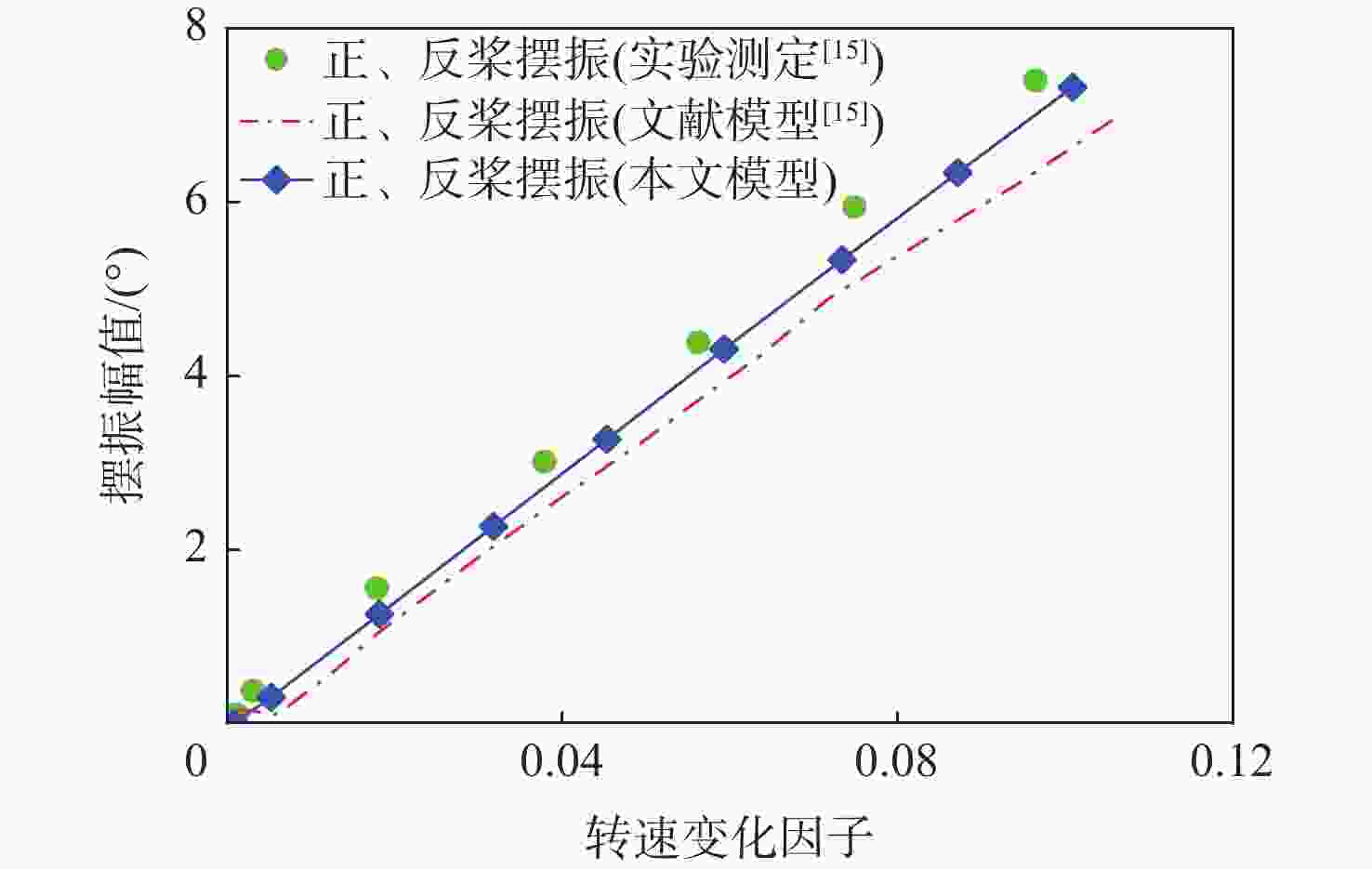
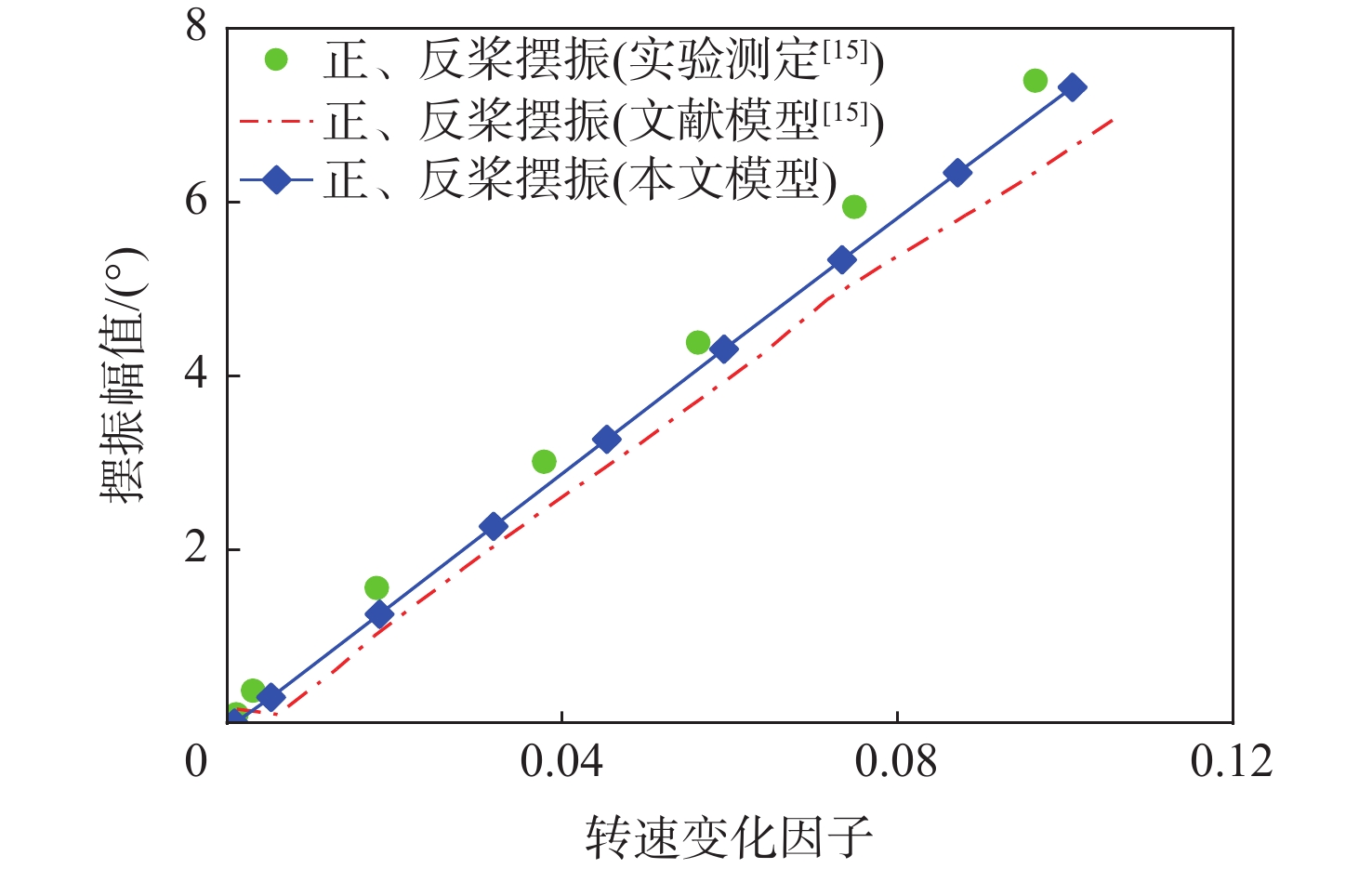
图 11 转速变化因子对摆振运动幅值的影响
Figure 11. Influence of speed change factor on swing motion amplitude
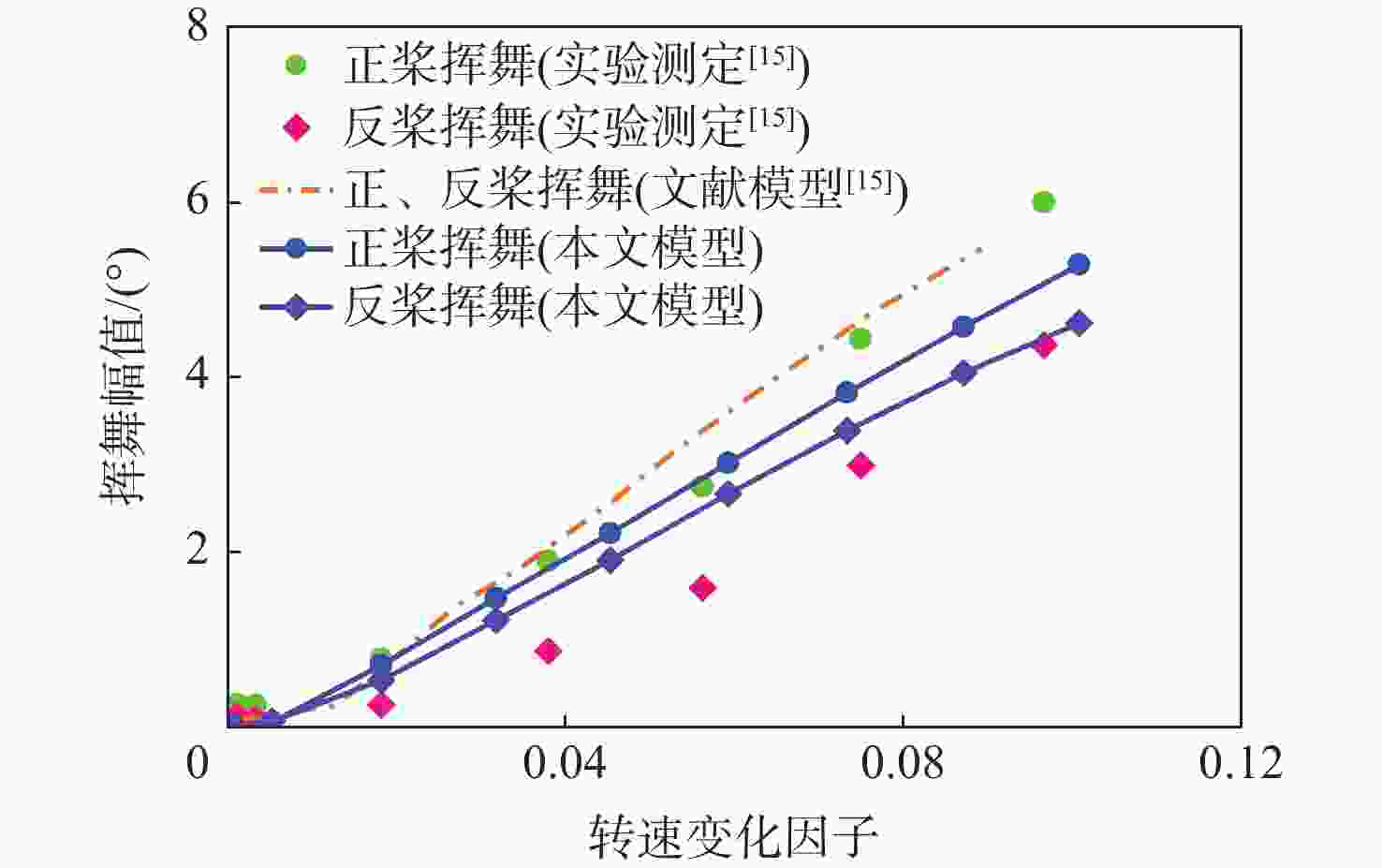
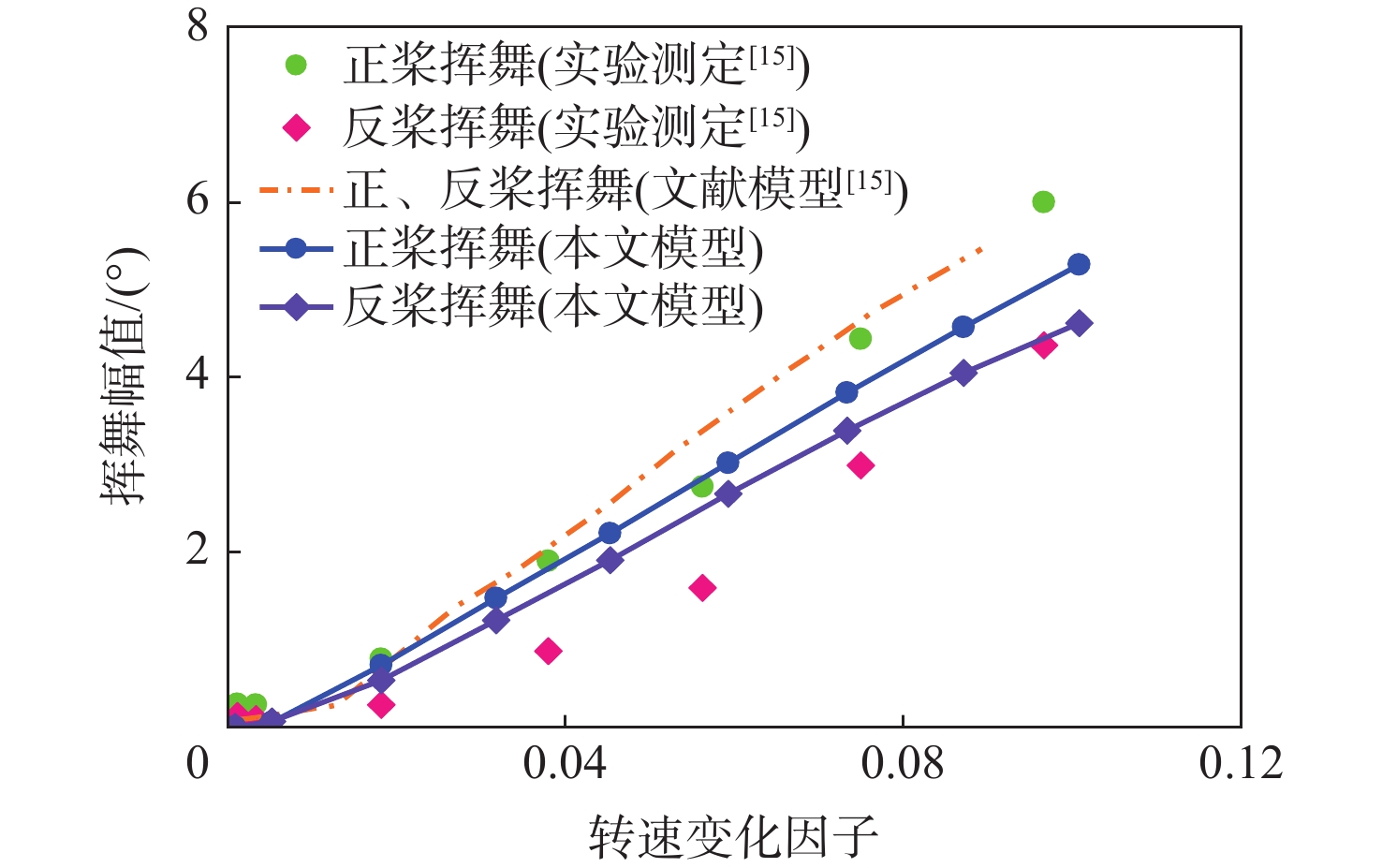
图 12 转速变化因子对挥舞运动幅值的影响
Figure 12. Influence of speed change factor on flap motion amplitude
表 1 连杆坐标系的D-H参数
Table 1. D-H parameters of linkage coordinate system
坐标系 $ {L}_{i-1} $ $ {\alpha }_{i-1} $/(°) $ {d}_{i} $ $ {\theta }_{i} $/(°) $ 0\rightarrow 1 $ 0 0 0 $ 90+{\theta }_{1} $ $ 1\rightarrow 2 $ $ {L}_{1}/2 $ 90 0 $ \delta +{\theta }_{2} $ $ 2\rightarrow 3 $ 0 −90 0 $ {\theta }_{3} $ $ 0\rightarrow 1\text{N} $ 0 0 0 $ {\theta }_{1}-90 $ $ 1\text{N}\rightarrow \text{2N} $ $ {L}_{1}/2 $ 90 0 $ -\delta +{\theta }_{2\text{N}} $ $ 2\text{N}\rightarrow 3\text{N} $ 0 −90 0 $ {\theta }_{3\text{N}} $ $ 1\text{N}\rightarrow \text{1} $ 0 0 0 180  下载: 导出CSV
下载: 导出CSV
表 2 旋翼结构参数
Table 2. Rotor structure parameters
倾斜铰
倾斜角
度/(°)桨盘
半径/
mm挥舞铰
偏置量桨毂
长度/
mm桨毂
质量/g桨叶
半径/
mm升力线
斜率桨叶
弦长/
mm桨叶
安装角/
(°)旋翼
实度桨叶
质量/g大气
密度/
(kg·m−3)挥舞
惯量/
(kg·m2)摩擦
系数
$ {\mu }_{1} $摩擦
系数
$ {\mu }_{2} $几何
系数
$ {G}_{\text{D}} $几何
系数
$ {G}_{\text{P}} $基准
转速/
(rad·s−1)45 159 0.076 24.2 10.5 146.9 5.73 19.3 9 0.0773 5.40 1.2 3.9×10−5 0.20 0.07 0.0125 0.0033 200
下载: 导出CSV
表 3 电机特性参数
Table 3. Motor characteristic parameter
反电动势常数/(V·(rad·s−1)−1) 电阻/Ω 电机阻尼系数 电机刚度系数 电机常值力矩 0.00954 0.305 0.0012 0.00094 0.0141
下载: 导出CSV
-
[1] 邓景辉. 直升机技术发展与展望[J]. 航空科学技术, 2021, 32(1): 10-16.DENG J H. Development and prospect of helicopter technology[J]. Aeronautical Science & Technology, 2021, 32(1): 10-16(in Chinese). [2] 李路明, 王立鼎. MEMS研究的新进展: 微型系统及其发展应用的研究[J]. 光学精密工程, 1997, 5(1): 67-73.LI L M, WANG L D. Microsystem and its development and applications[J]. Optics and Precision Engineering, 1997, 5(1): 67-73(in Chinese). [3] 陈世适, 姜臻, 董晓飞, 等. 微小型飞行器发展现状及关键技术浅析[J]. 无人系统技术, 2018, 1(1): 38-53.CHEN S S, JIANG Z, DONG X F, et al. Overview of micro aerial vehicles and its key technologies[J]. Unmanned Systems Technology, 2018, 1(1): 38-53(in Chinese). [4] 尹欣繁, 张代兵, 张纪阳, 等. 微型无人直升机发展现状及关键技术[J]. 飞航导弹, 2018(5): 33-37.YIN X F, ZHANG D B, ZHANG J Y, et al. Development status and key technologies of micro unmanned helicopter[J]. Aerodynamic Missile Journal, 2018(5): 33-37(in Chinese). [5] KIM S, TILBURY D. Mathematical modeling and experimental identification of a model helicopter[C]//Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit. Reston: AIAA, 1998: 4357. [6] DADKHAH N, METTLER B. System identification modeling and flight characteristics analysis of miniature coaxial helicopter[J]. Journal of the American Helicopter Society, 2014, 59(4): 36-51. [7] PAULOS J, YIM M. An underactuated propeller for attitude control in micro air vehicles[C]//Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2014: 1374-1379. [8] PAULOS J, YIM M. Flight performance of a swashplateless micro air vehicle[C]//Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2015: 5284-5289. [9] 尹欣繁. 无斜盘微型无人直升机设计与飞行控制研究[D]. 长沙: 国防科技大学, 2017: 5-10.YIN X F. Design and flight control of a swashplateless micro unmanned helicopter[D]. Changsha: National University of Defense Technology, 2017: 5-10(in Chinese). [10] 黄灿铭. 微小型无斜盘双旋翼飞行器的设计及实现[D]. 北京: 北京邮电大学, 2021: 10-20.HUANG C M. Implementation of micro swashplateless twin rotor aircraft[D]. Beijing: Beijing University of Posts and Telecommunications, 2021: 10-20(in Chinese). [11] 王彪, 任至楷, 张宝晴, 等. 斜铰旋翼操纵力矩生成研究[J]. 机械制造与自动化, 2021, 50(2): 102-105.WANG B, REN Z K, ZHANG B Q, et al. Research on the moment generation of tilt-hinge rotor[J]. Machine Building & Automation, 2021, 50(2): 102-105(in Chinese). [12] 任至楷. 电动斜铰旋翼研发及其在无人直升机上的应用[D]. 南京: 南京航空航天大学, 2020: 5-10.REN Z K. Research and development of electric tilt-hinge rotor and its application in unmanned helicopter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020: 5-10(in Chinese). [13] 徐家梁. 电动旋翼飞行器动力/推进操纵新技术研究[D]. 南京: 南京航空航天大学, 2018: 8-18.XU J L. Research on power/propulsion control technology of electrical-driving rotor systems[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018: 8-18(in Chinese). [14] 张宝晴. 基于电动斜铰旋翼的纵列式双旋翼无人直升机研究[D]. 南京: 南京航空航天大学, 2021: 7-18.ZHANG B Q. Research of an unmanned tandem-rotor helicopter based on electric tilt-hinge rotors[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021: 7-18(in Chinese). [15] PAULOS J, YIM M. Cyclic blade pitch control without a swashplate for small helicopters[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(3): 689-700. [16] YU J, LIU Y, YANG W D. Dynamics research on actively controlled swashplateless rotor[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(12): 4492-4508. [17] CRAIG J J. Introduction to robotics: mechanics and control[M]. 4th ed. London: Pearson Education Inc, 2005: 70-80. [18] LEISHMAN J G. Principles of helicopter aerodynamics[M]. 2nd ed. New York: Cambridge University Press, 2006: 80-127. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 340
- HTML全文浏览量: 172
- PDF下载量: 13
- 被引次数: 0
