



-
摘要:
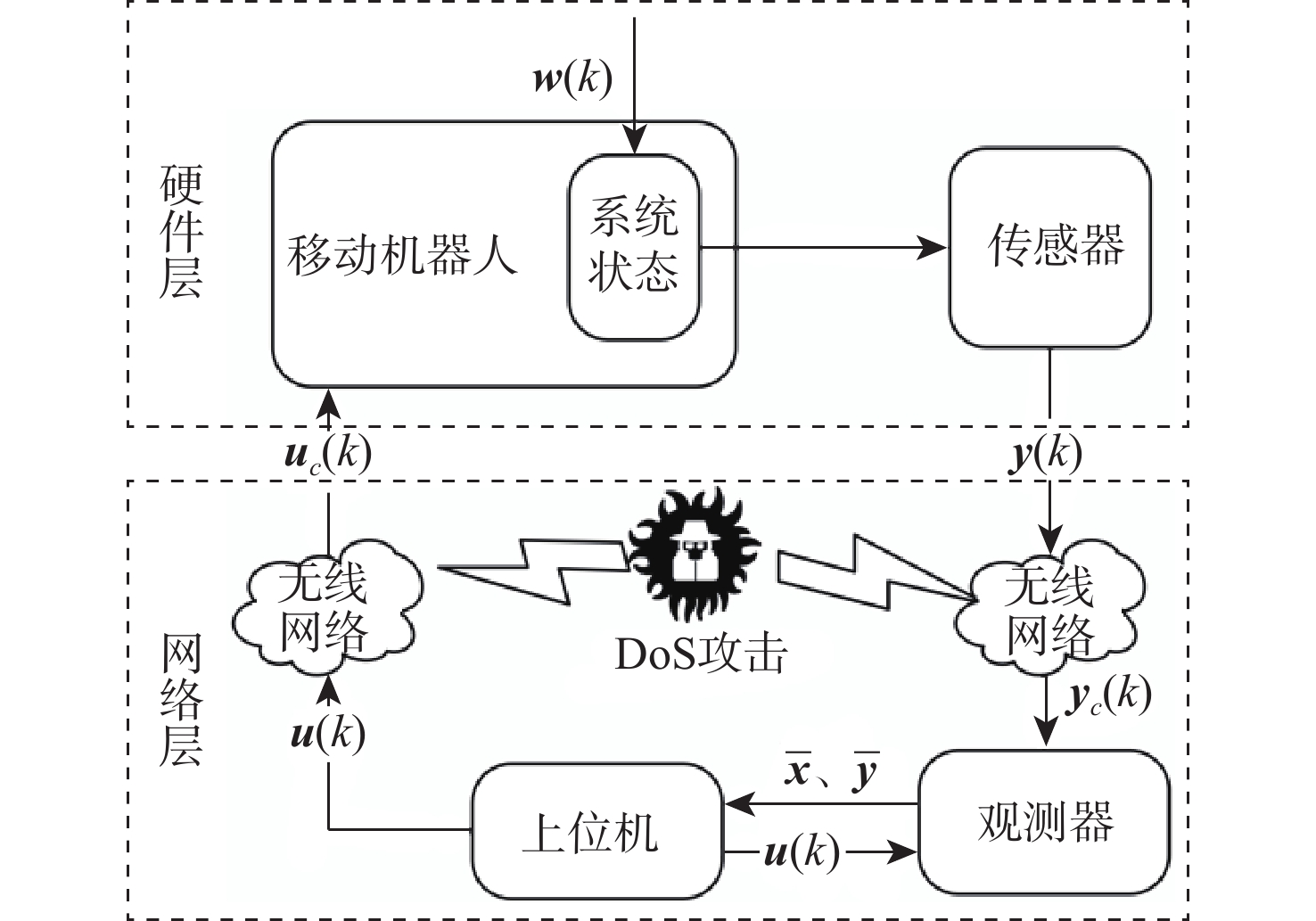
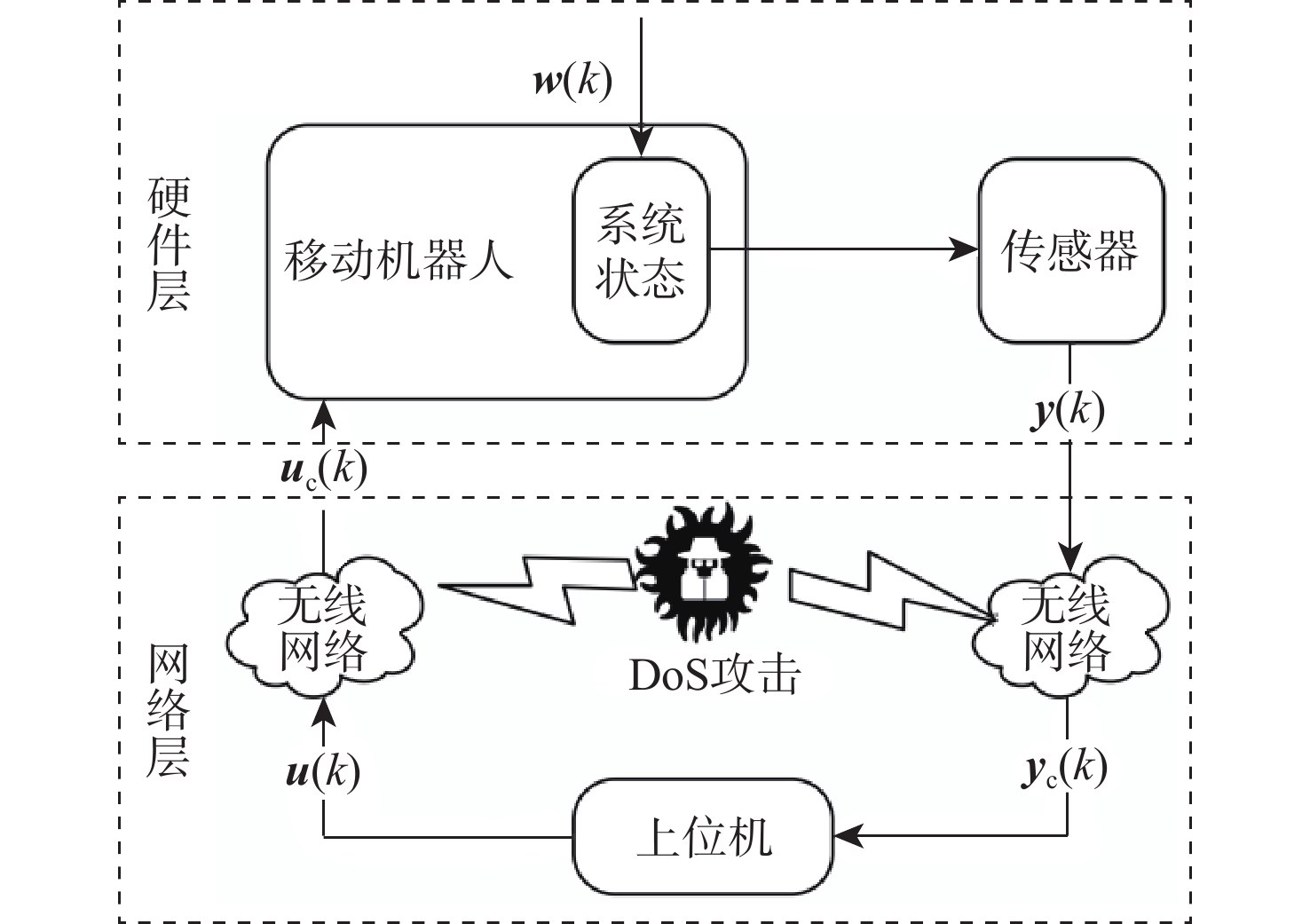
移动机器人系统入网逐渐应用到多种场景中,然而接入网络会使系统面临网络攻击的风险,进而可能导致系统状态失稳,甚至发生功能失效的情况。针对移动机器人系统在受拒绝服务(DoS)攻击下的系统状态稳定性,提出一种基于
H ∞控制的移动机器人系统的鲁棒策略。将DoS攻击对系统的影响建模为具有伯努利分布的随机丢包,采用基于状态观测器的反馈补偿对移动机器人系统受到攻击时进行鲁棒控制;利用李雅普诺夫稳定性理论,得到满足闭环系统指数均方稳定和H ∞控制的充分条件;基于此条件求解线性矩阵不等式约束,得到了观测器和控制器的增益矩阵,进而实现系统鲁棒控制,达到抗干扰的效果。通过仿真对比实验验证了所提策略能够有效降低系统受DoS攻击的影响,保证系统状态稳定性。Abstract:Mobile robot systems are increasingly being integrated into various scenarios. However, connecting these systems to networks exposes them to the risk of cyber-attacks, potentially leading to functional failures and system destabilization. This paper focuses on the stability of mobile robot systems under denial-of-service (DoS) attacks and proposes a robust control strategy based on
H ∞ control. In the strategy, the impact of DoS attacks on the system is first modeled as random packet loss with a Bernoulli distribution. When the mobile robot system is attacked, robust control is achieved by using feedback compensation based on a state observer. Sufficient conditions for exponential mean-square stability andH ∞ control of the closed-loop system are derived using Lyapunov stability theory. n order to acquire the observer and controller gain matrices, which allow for robust system control and anti-interference effects, these criteria are used to solve linear matrix inequality constraints. Finally, through simulation experiments, it is demonstrated that the proposed strategy effectively mitigates the impact of DoS attacks on the system, ensuring the stability of the system.-
Key words:
- mobile robot /
- DoS attack /
- H∞ control /
- observer /
- robust control
-
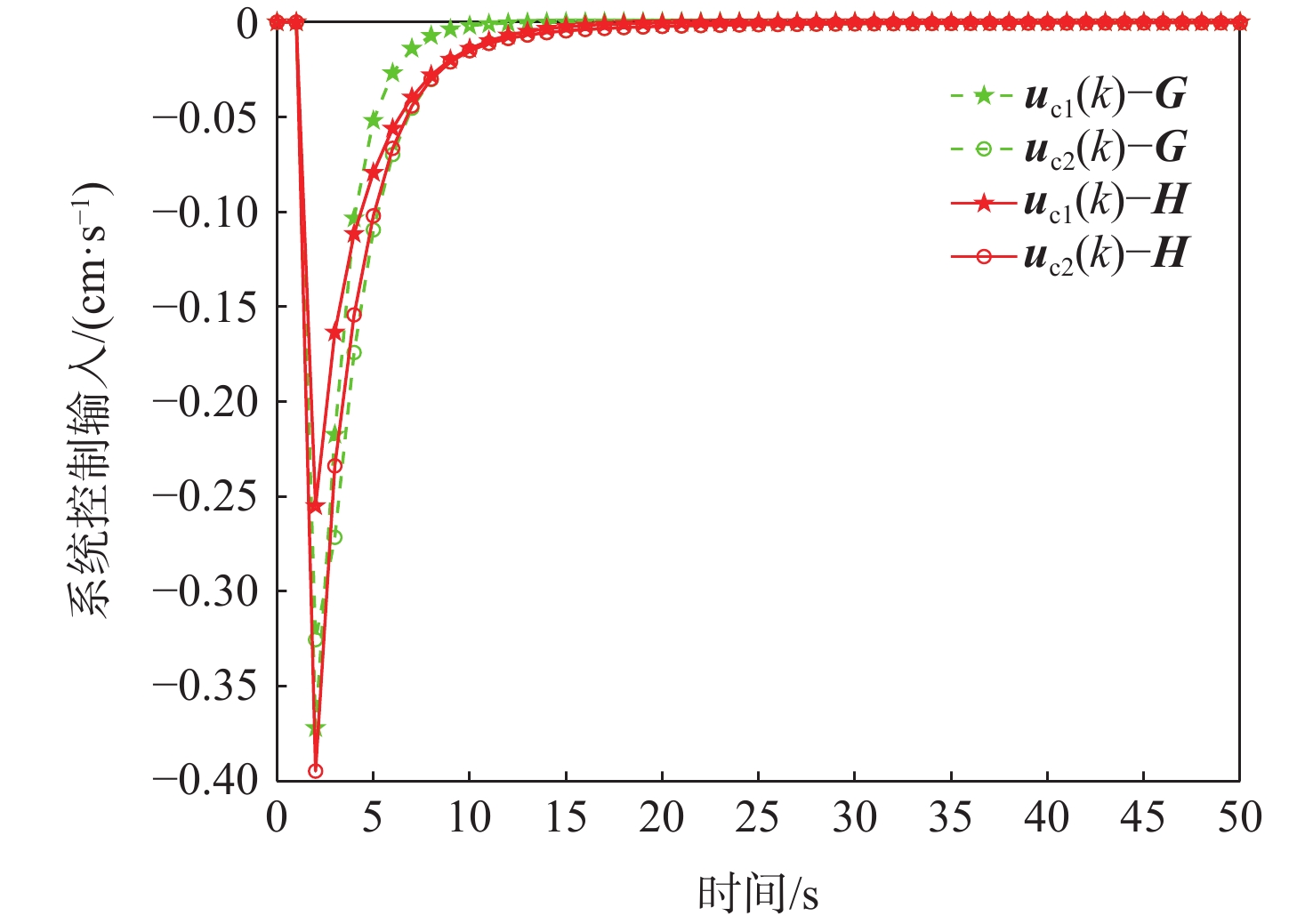
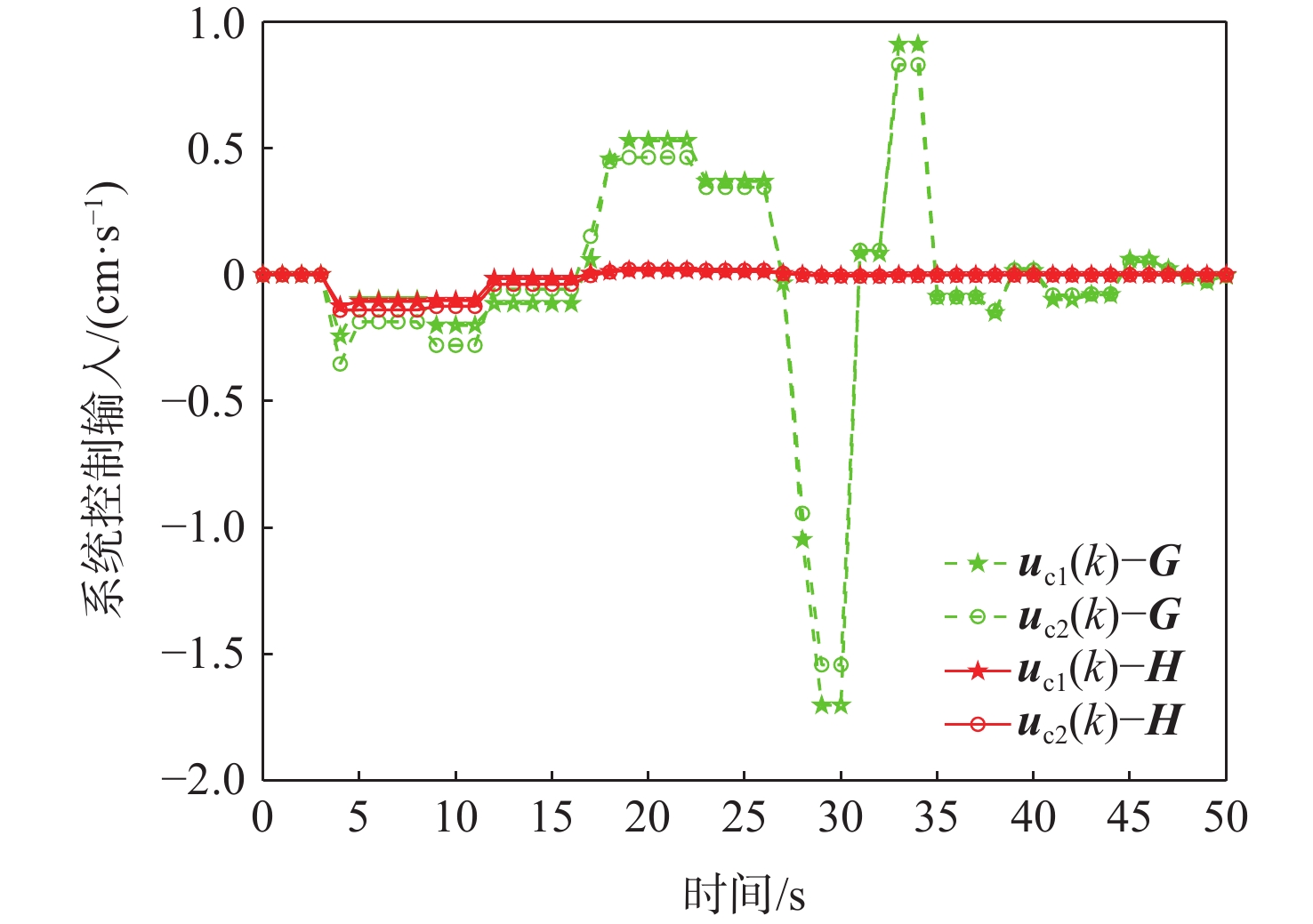
图 4 无DoS攻击的系统控制输入$ \boldsymbol{u}\left(k\right) $
Figure 4. System input $ \boldsymbol{u}\left(k\right) $ without DoS attack
-
[1] ZHU X Y, ZHANG H, CAO D P, et al. Robust control of integrated motor-transmission powertrain system over controller area network for automotive applications[J]. Mechanical Systems and Signal Processing, 2015, 58-59: 15-28. [2] WEI H H, ZHANG Y T, SUN X M, et al. Intelligent robots and human-robot collaboration in the construction industry: a review[J]. Journal of Intelligent Construction, 2023, 1(1): 1-12. [3] YIN T, LU N, GUO G S, et al. Knowledge and data dual-driven transfer network for industrial robot fault diagnosis[J]. Mechanical Systems and Signal Processing, 2023, 182: 109597. [4] YAN Z, OUYANG B, LI D, et al. Network intelligence empowered industrial robot control in the F-RAN environment[J]. IEEE Wireless Communications, 2020, 27(2): 58-64. [5] 张振国, 毛建旭, 谭浩然, 等. 重大装备制造多机器人任务分配与运动规划技术研究综述[J]. 自动化学报, 2024, 50(1): 21-41.ZHANG Z G, MAO J X, TAN H R, et al. A review of task allocation and motion planning for multi-robot in major equipment manufacturing[J]. Acta Automatica Sinica, 2024, 50(1): 21-41(in Chinese). [6] OLIVATO M, COTUGNO O, BRIGATO L, et al. A comparative analysis on the use of autoencoders for robot security anomaly detection[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2020: 984-989. [7] CLARK G W, DORAN M V, ANDEL T R. Cybersecurity issues in robotics[C]//Proceedings of the IEEE Conference on Cognitive and Computational Aspects of Situation Management. Piscataway: IEEE Press, 2017: 1-5. [8] MIT Technology Review. Spoofers use fake GPS signals to knock a yacht off course[EB/OL]. (2013-08-14)[2024-03-01]. https://www.technologyreview.com/2013/08/14/177015. [9] MAGGI F, QUARTA D, POGLIANI M, et al. Rogue robots: testing the limits of an industrial robot’s security[EB/OL]. (2017-05-03)[2024-03-01]. https://documents.trendmicro.com/assets/wp/wp-industrial-robot-security.pdf. [10] SARGOLZAEI A, YAZDANI K, ABBASPOUR A, et al. Detection and mitigation of false data injection attacks in networked control systems[J]. IEEE Transactions on Industrial Informatics, 2020, 16(6): 4281-4292. [11] WU C W, YAO W R, LUO W S, et al. A secure robot learning framework for cyber attack scheduling and countermeasure[J]. IEEE Transactions on Robotics, 2023, 39(5): 3722-3738. [12] AMULLEN E M, SHETTY S, KEEL L H. Model-based resilient control for a multi-agent system against Denial of Service attacks[C]//Proceedings of the World Automation Congress. Piscataway: IEEE Press, 2016: 1-6. [13] GUERRERO-HIGUERAS Á M, DECASTRO-GARCÍA N, MATELLÁN V. Detection of Cyber-attacks to indoor real time localization systems for autonomous robots[J]. Robotics and Autonomous Systems, 2018, 99: 75-83. [14] PU H Y, HE L, CHENG P, et al. Security of industrial robots: vulnerabilities, attacks, and mitigations[J]. IEEE Network, 2023, 37(1): 111-117. [15] ZHANG D, SHEN Y P, ZHOU S Q, et al. Distributed secure platoon control of connected vehicles subject to DoS attack: theory and application[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(11): 7269-7278. [16] CAI X, SHI K B, SHE K, et al. Performance degradation estimation mechanisms for networked control systems under DoS attacks and its application to autonomous ground vehicle[J]. IEEE Transactions on Cybernetics, 2024, 54(5): 2992-3002. [17] TANG Y, ZHANG D D, HO D W C, et al. Event-based tracking control of mobile robot with denial-of-service attacks[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(9): 3300-3310. [18] 赵宁, 张会焱, 石碰. 拒绝服务攻击下网络化控制系统的基于观测器输出反馈控制[J]. 南京信息工程大学学报(自然科学版), 2020, 12(3): 279-283.ZHAO N, ZHANG H Y, SHI P. Observer-based output feedback control for networked control systems under denial-of-service attacks[J]. Journal of Nanjing University of Information Science & Technology (Natural Science Edition), 2020, 12(3): 279-283(in Chinese). [19] GENG Q, ZHAO L, LI L, et al. A dynamic controller design for trajectory tracking control of wheeled mobile robot under stochastic denial of service attacks[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(8): 3560-3564. [20] TARN T J, RASIS Y. Observers for nonlinear stochastic systems[J]. IEEE Transactions on Automatic Control, 1976, 21(4): 441-448. [21] WANG Z D, YANG F W, HO D W C, et al. Robust Hınfty control for networked systems with random packet losses[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2007, 37(4): 916-924. [22] WU J, CHEN T W. Design of networked control systems with packet dropouts[J]. IEEE Transactions on Automatic Control, 2007, 52(7): 1314-1319. [23] SUH Y S. Stability and stabilization of nonuniform sampling systems[J]. Automatica, 2008, 44(12): 3222-3226. [24] HALE M T, EGERSTEDTY M. Differentially private cloud-based multi-agent optimization with constraints[C]//Proceedings of the American Control Conference. Piscataway: IEEE Press, 2015: 1235-1240. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 829
- HTML全文浏览量: 214
- PDF下载量: 2
- 被引次数: 0
