



-
摘要:
采用翼身融合、飞发一体化设计技术的水平起降组合动力运载器,具有可快速部署、高效运行、重复执行空天往返任务的应用前景。但是,这类布局飞行器的飞行动力学受气动非线性、气动-动力-结构弹性耦合等影响,呈现纵-横向运动耦合、飞行姿态-轨迹耦合等特性,给控制设计带来挑战。对此,从建立描述翼身融合组合动力运载器的多种耦合特性的飞行动力学模型着手,研究其飞行动力学特性,并提出多回路控制方案,引入动态逆回路进行耦合抑制,结合常规PID控制,易于设计实现。通过大量拉偏仿真表明:所提控制方案在抑制耦合的基础上能够实现良好的姿态和轨迹跟踪性能,在模型、环境、信号测量等不确定性的影响下具有良好的鲁棒性和抗干扰性。
Abstract:Horizontal takeoff and landing vehicles with integrated aero engines, blended wing bodies, and combined cycle power have the potential to be swiftly deployed and utilized in repeated aerospace round-trip missions with great transportation efficiency. However, their flight dynamics are affected by strong nonlinearity, aero-engine-elastic coupling, longitudinal-lateral kinematic coupling, and flight attitude-trajectory coupling, making control design challenging. In this regard, a flight dynamics model is established in this paper, which describes various coupling characteristics of a general blended-wing-body combined-cycle-power vehicle. Then, its flight dynamic characteristics are analyzed. By combining traditional PID control with dynamic inversion to suppress couplings, a multi-loop control law that is simple to apply is created. The multiple stochastic simulation results show that the control law not only helps suppress couplings but also achieves good tracking performance in attitude and trajectory, as well as good control robustness and anti-interference ability under uncertainties such as modeling, environment, and sensing.
-
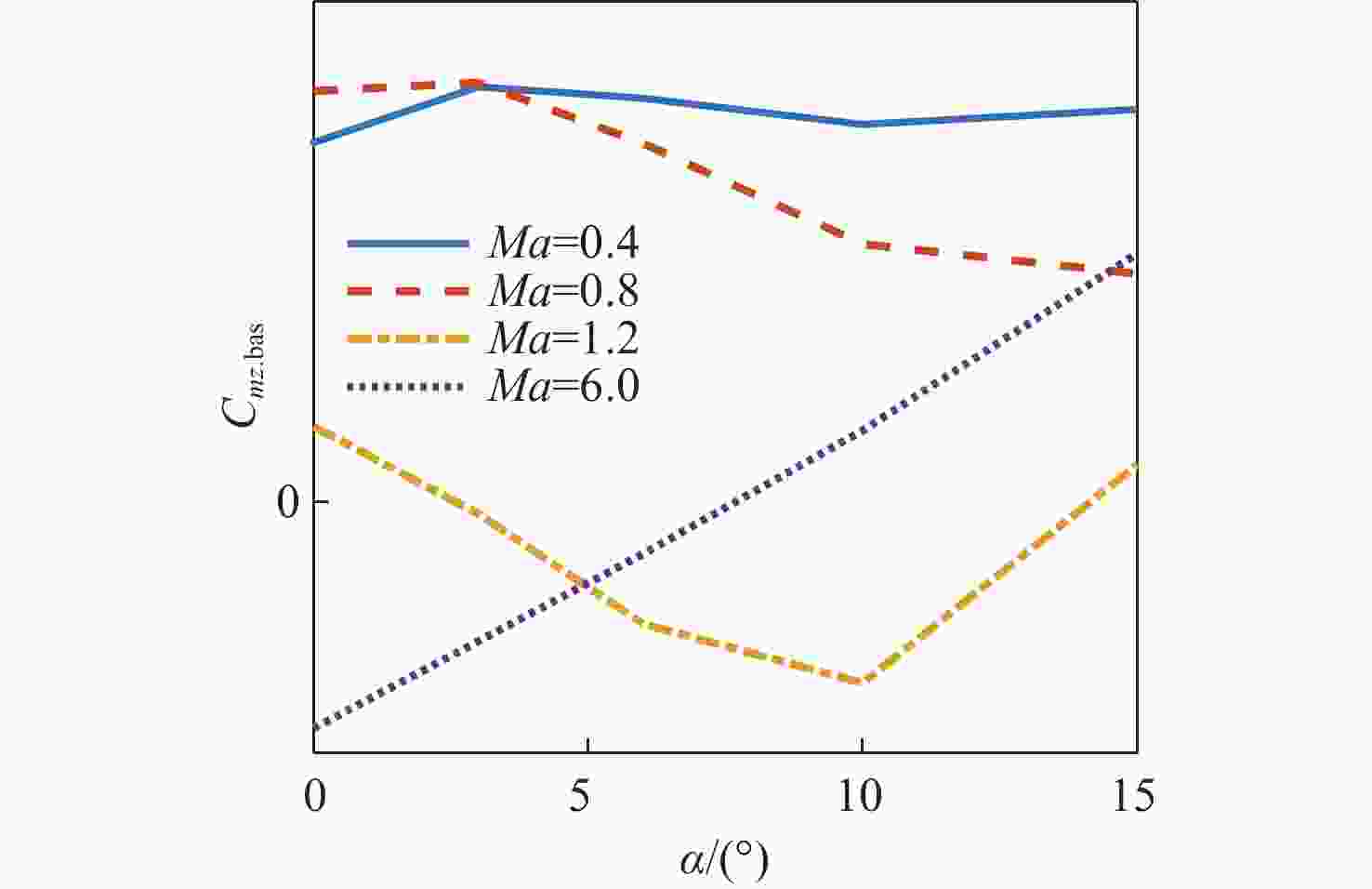
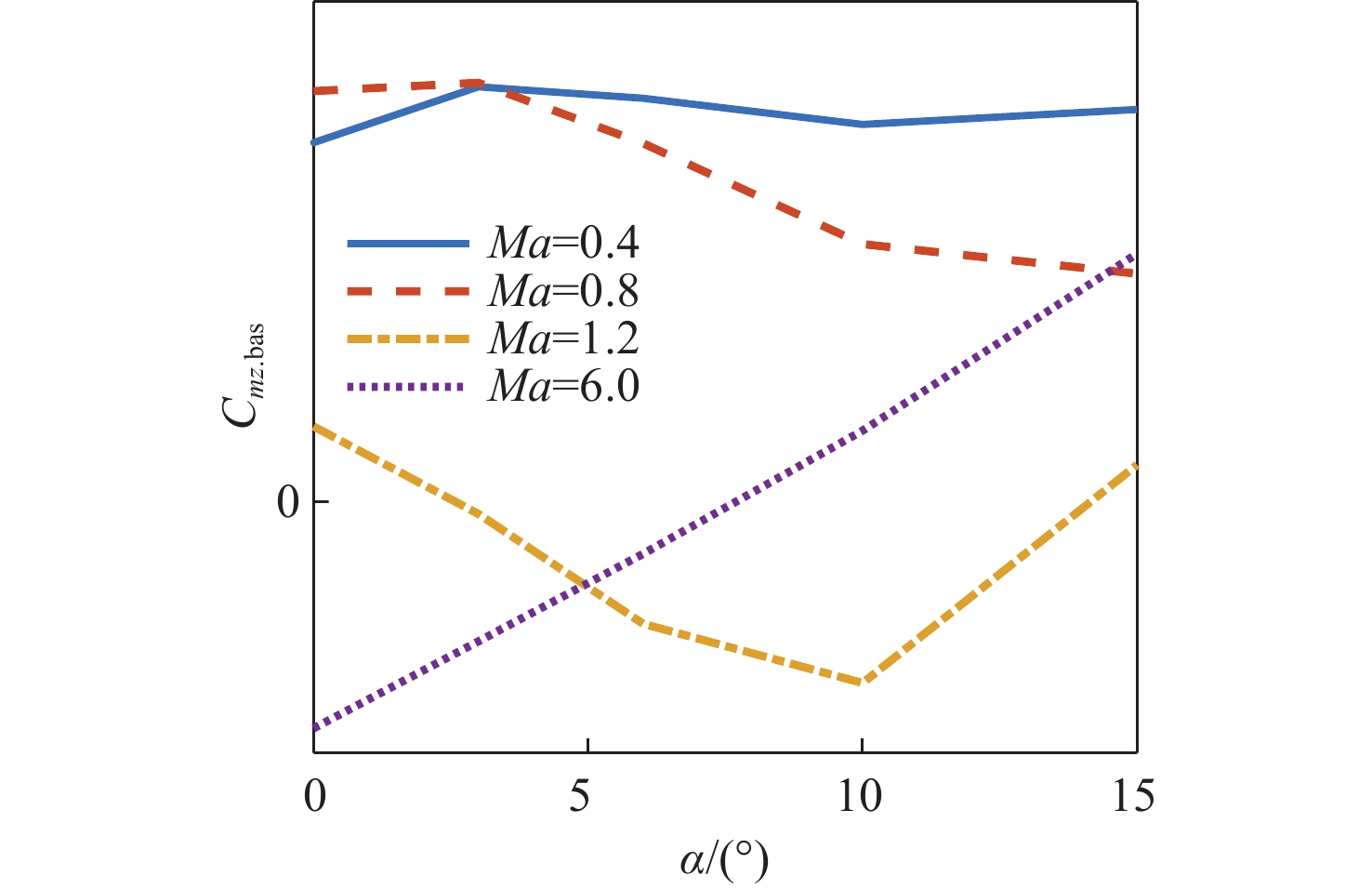
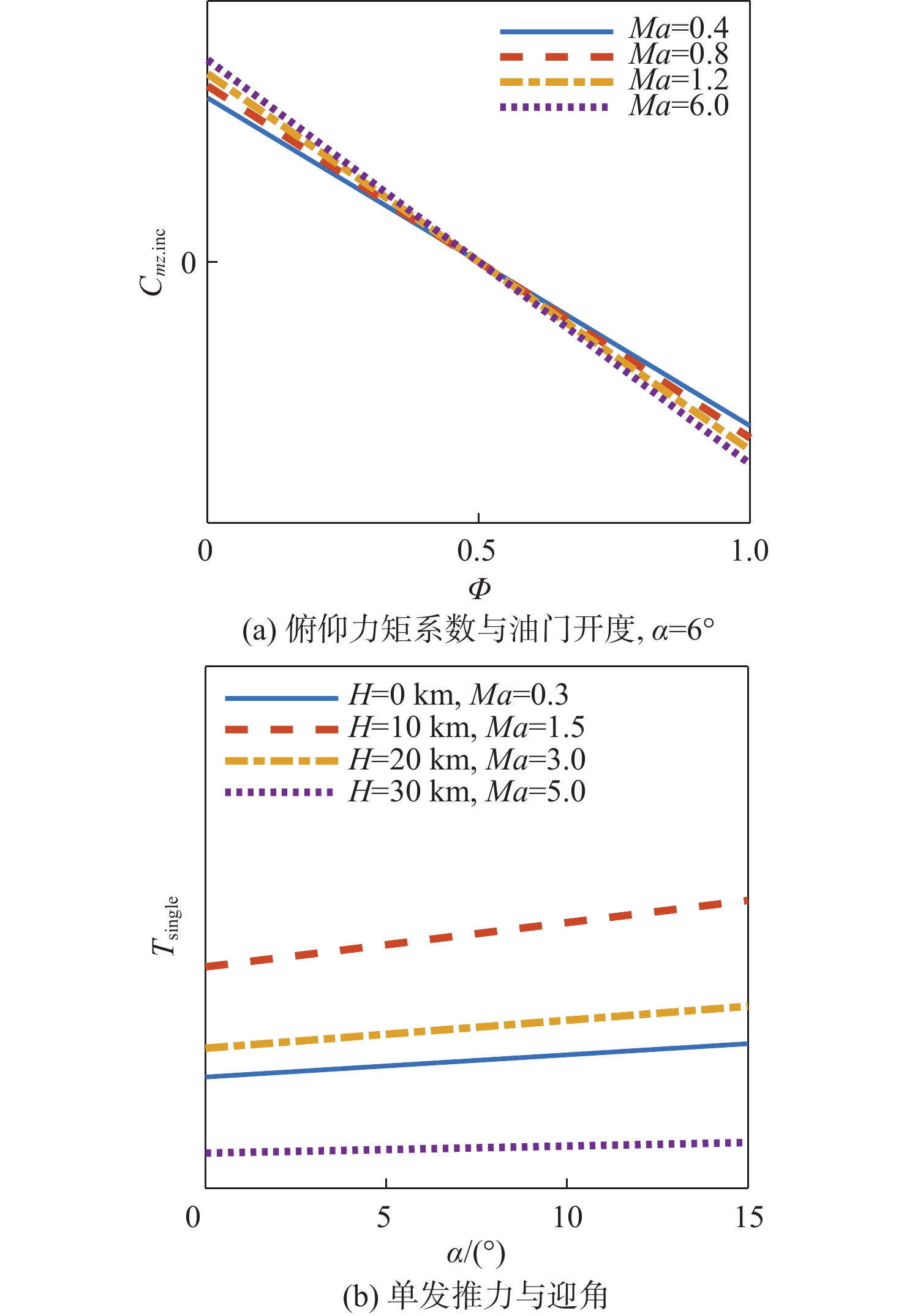
图 2 基准态俯仰力矩系数与迎角的关系
Figure 2. Relationship between pitching moment coefficient and angle of attack
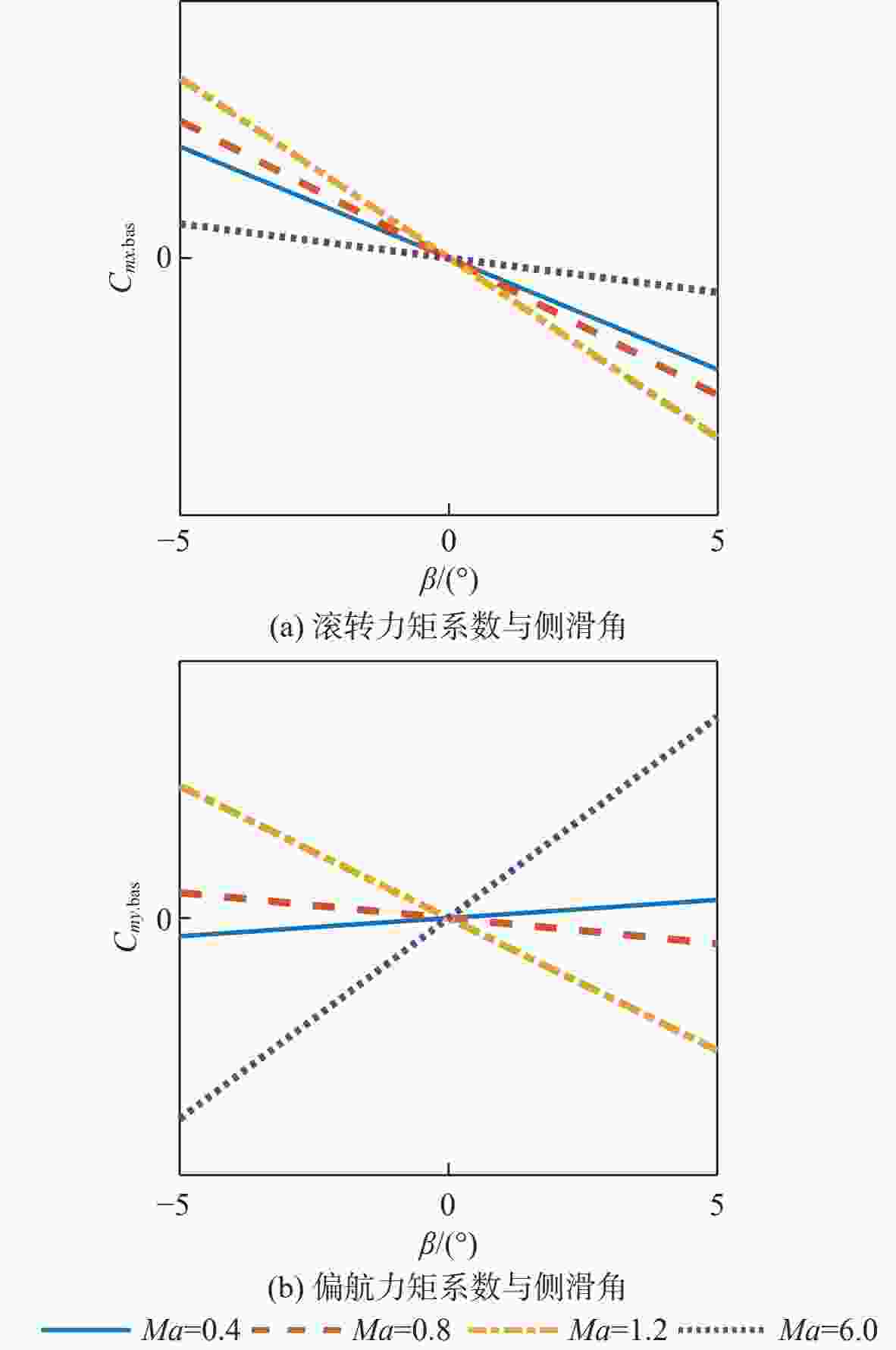
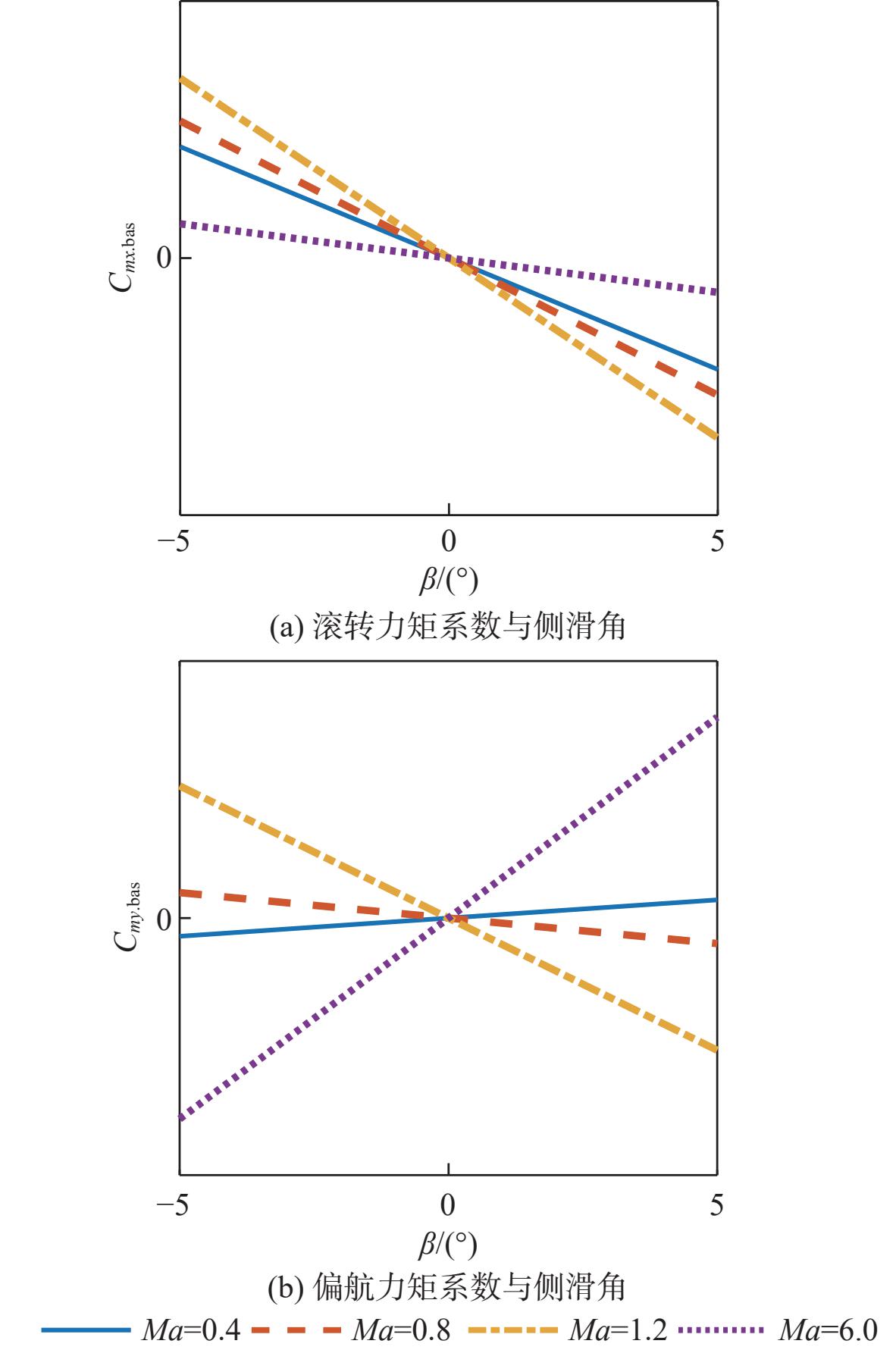
图 3 基准态滚转、偏航力矩系数与侧滑角的关系
Figure 3. Relationship between rolling, yawing moment coefficient and sideslip angle
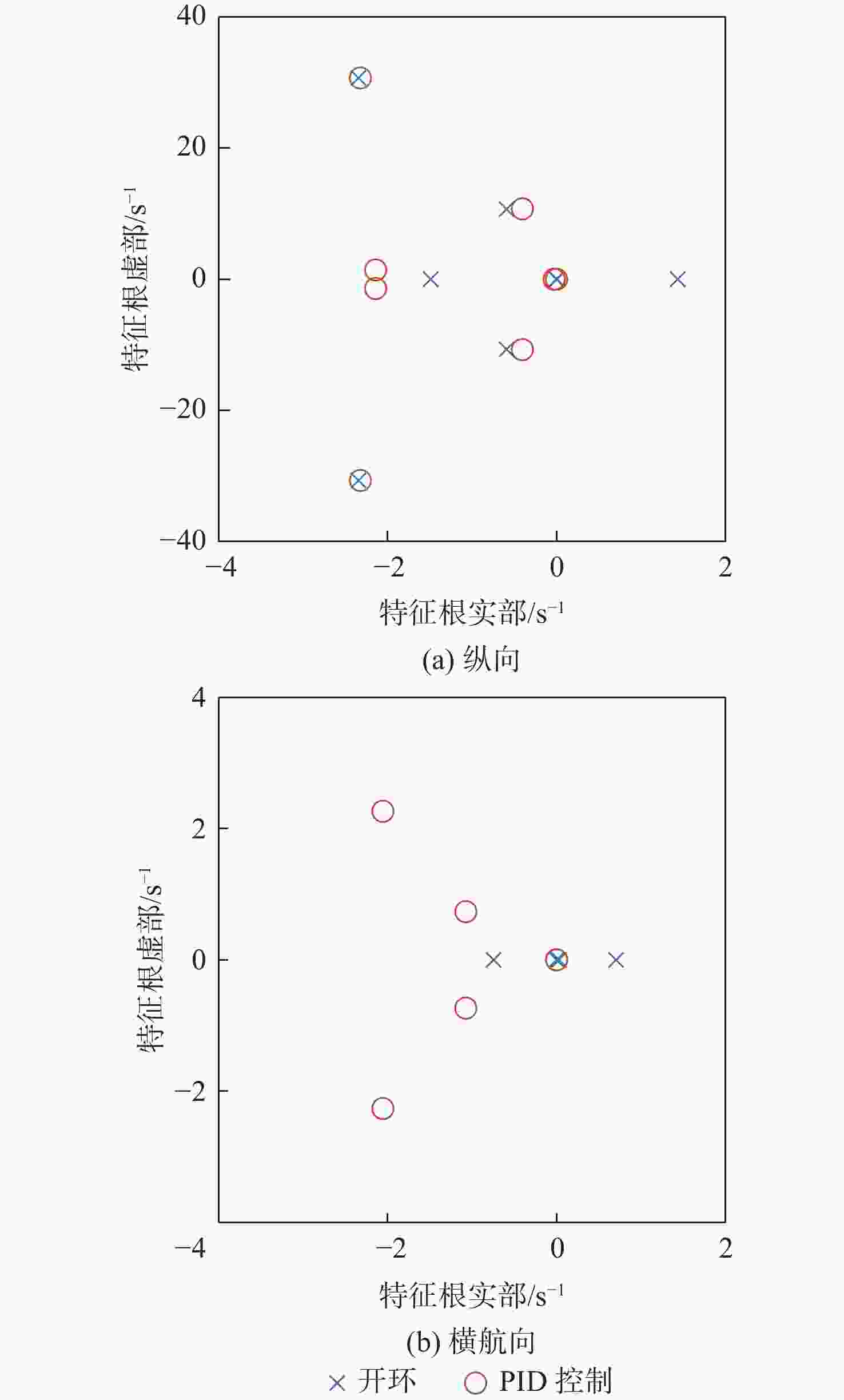
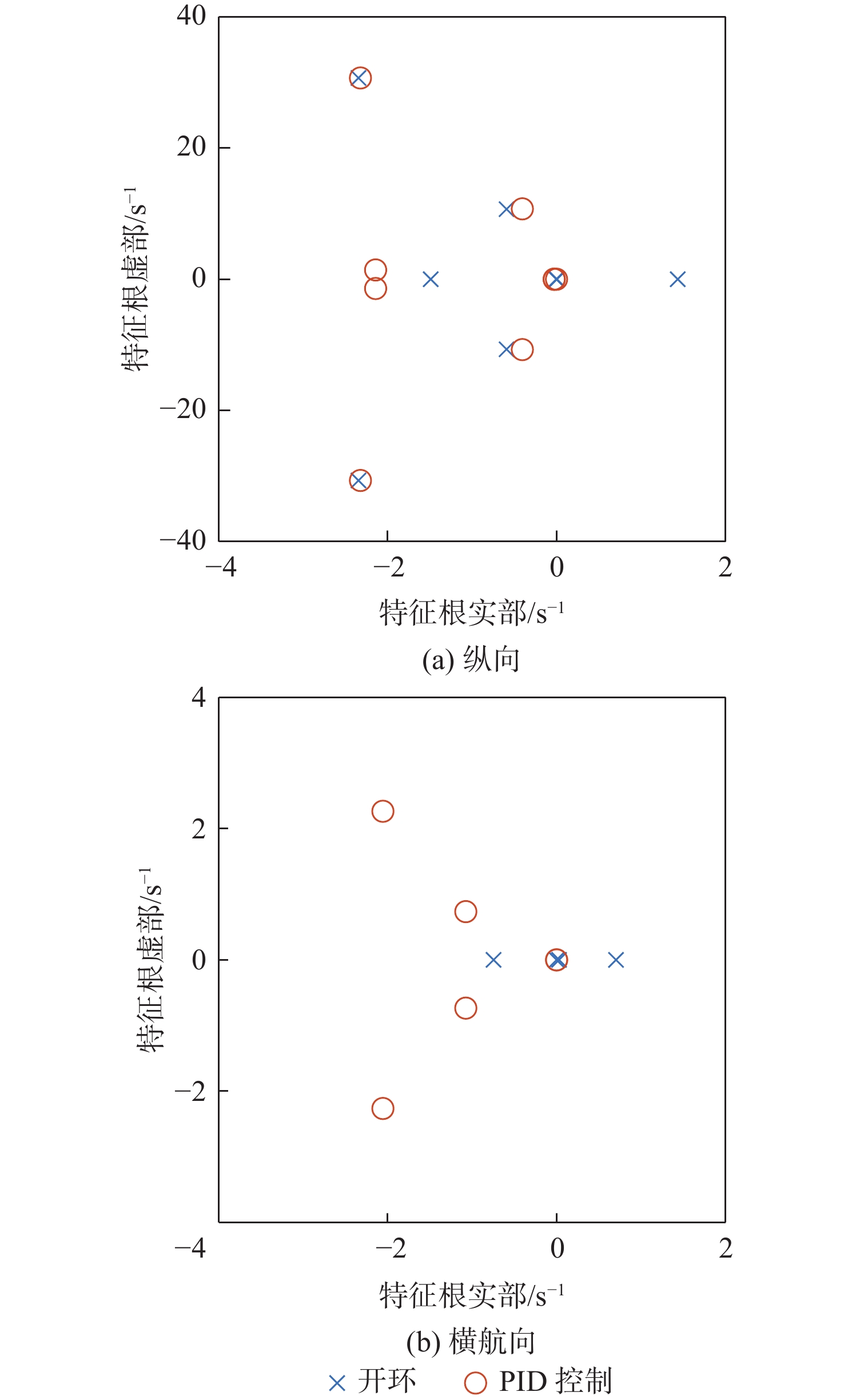
图 9 PID控制对模态特征根的影响(状态3)
Figure 9. Effect of PID controllers on eigenvalues at status 3
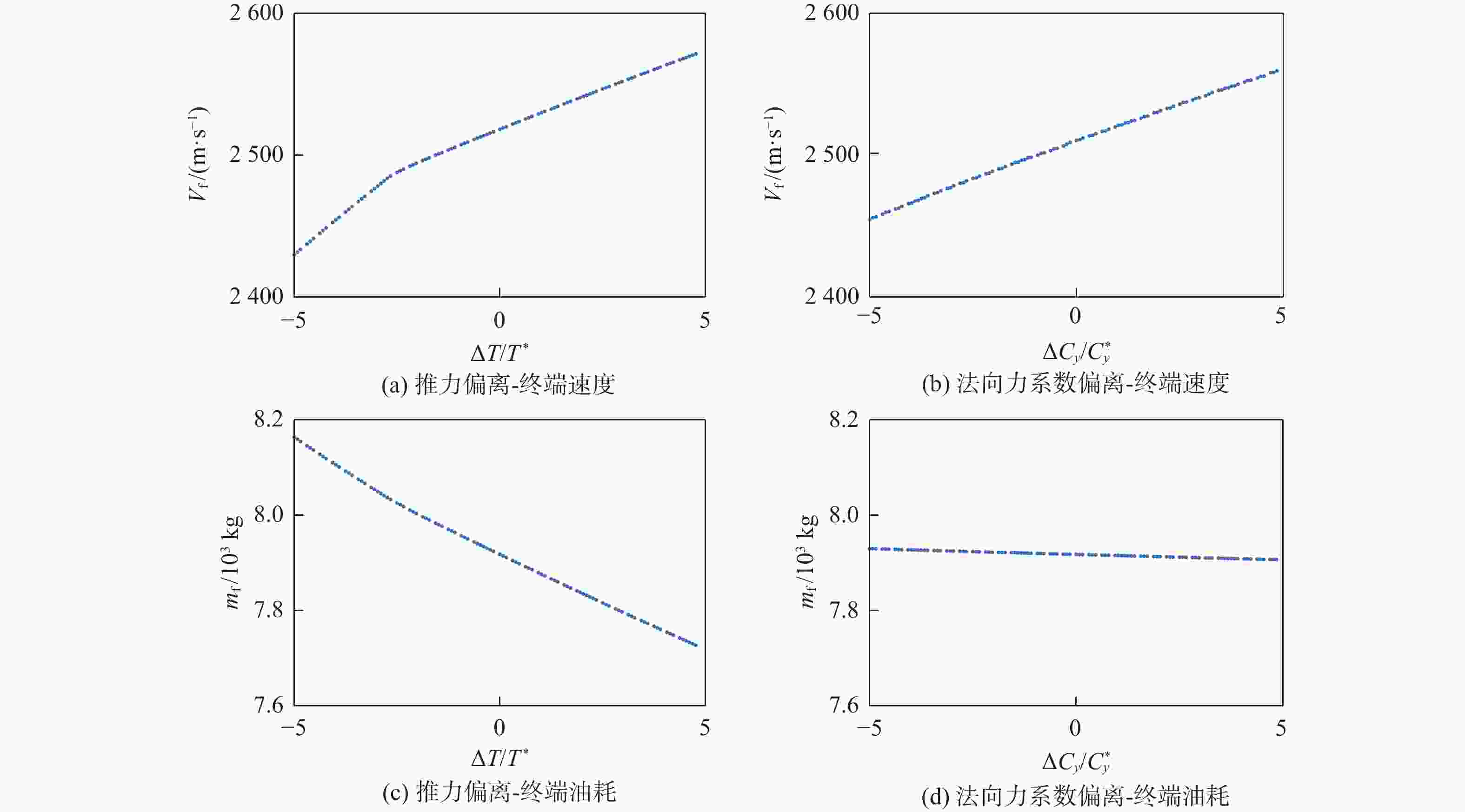
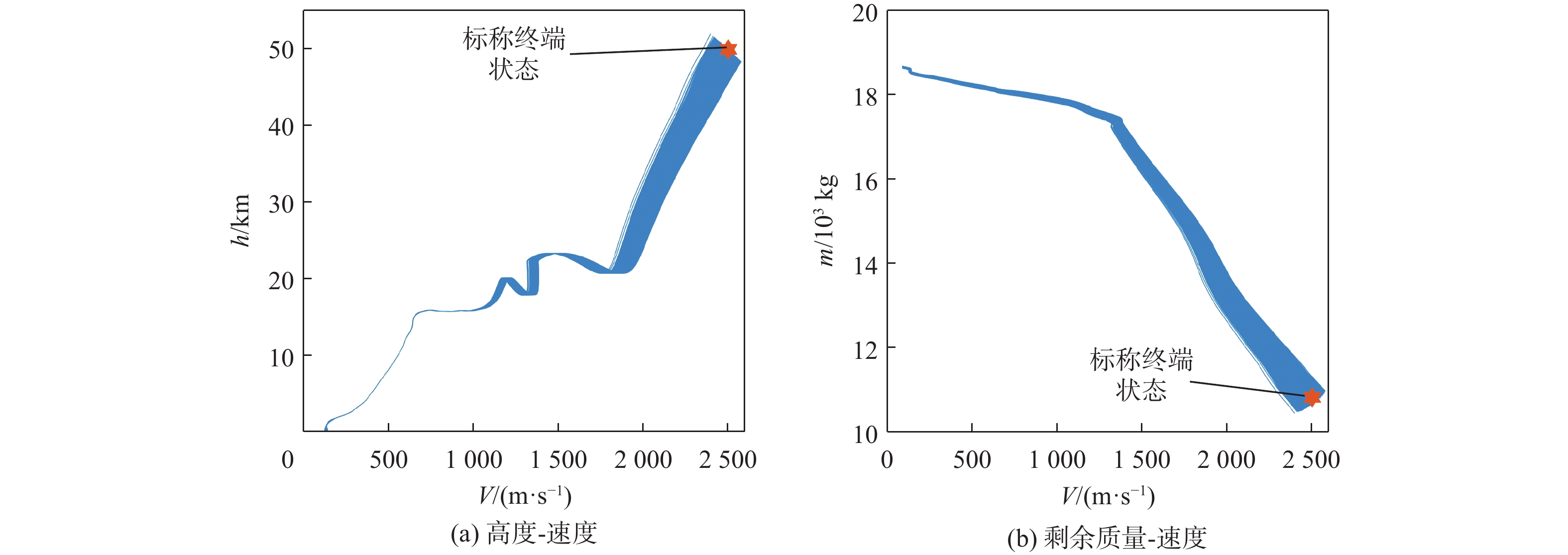
图 18 不确定性对任务性能的影响分布示例
Figure 18. Exemplary distributions of uncertainties and task performance
表 1 目标运载器总体特征
Table 1. Overall characteristics of target vehicle
满油总
质量/kg燃油
质量/kg机身
长度/m机翼
翼展/m2吸气模式总推力
(台架推力)/kN火箭模式总推力
(推力恒定)/kN18750 8750 28.5 4.5 125 125  下载: 导出CSV
下载: 导出CSV
表 2 机身弹性数据
Table 2. Elastic data of fuselage
弯曲刚度
EI /(N·m2)机体前段等效
梁线密度
$ \overline{{m}} $f /(kg·m−1)机体后段等
效梁线密度
$ \overline{{m}} $a /(kg·m−1)机体前段
等效梁
长度$ \overline{{x}} $f /m机体后段
等效梁
长度$ \overline{{x}} $a /m弹性振动
阻尼比ζ1.121×109 301.2 1437.1 19.55 8.95 0.05
下载: 导出CSV
表 3 机身等效梁的固有频率
Table 3. Natural frequencies of equivalent beams
阶数k 前段梁ωf/ (rad·s−1) 后段梁ωa/(rad·s−1) 1 8.87 19.39 2 55.62 121.49 3 155.73 340.17 4 305.17 666.58
下载: 导出CSV
表 5 目标运载器刚性/弹性模型的配平参数
Table 5. Trim parameters of rigid/flexible target vehicle models
状态 模型 油门开度 迎角/
(°)升降
副翼/(°)弹性前、后段广义
坐标/(kg0.5·m)1 刚性 0.27 12.00 7.38 1.00 10.80 6.16 弹性 1.00 10.35 7.79 22.8、6.3 2 刚性 0.33 2.46 0.38 1.00 2.44 −0.73 弹性 1.00 1.97 0.98 26.6、4.5 3 刚性 0.67 7.07 −4.73 1.00 7.11 −9.42 弹性 1.00 6.77 −4.89 22.8、2.8 4 刚性 0 3.36 −19.52 0.28 3.51 −24.35 弹性 0.28 2.99 −18.94 38.0、−1.2 4
(文献[43])刚性 0.26 3.70 10.10 弹性 0.28 2.99 11.22 6.6、3.7
下载: 导出CSV
表 6 目标运载器刚性/弹性部分模态特征根
Table 6. Partial modal eigenvalues of rigid/flexible vehicle models
状态 模型 弹性模态 俯仰短时域 横侧振荡 偏航发散 1 刚性 −0.66, 0.21 0.17 ± 0.82i 3.0×10−5 弹性 −2.2 ± 28.4i
−0.53 ± 9.9i−0.70, 0.24 0.18 ± 0.80i 2.9×10−5 2 刚性 −0.25 ± 1.4i −0.078 ± 0.83i 2.6×10−5 弹性 −2.3 ± 28.9i
−0.53 ± 9.9i−0.25 ± 1.3i 0.091 ± 0.78i 2.5×10−5 3 刚性 −1.54, 1.48 0.70, 0.026 1.7×10−4 弹性 −2.3 ± 30.7i
−0.59 ± 10.7i−1.49, 1.43 0.70, 0.029 1.7×10−4 4 刚性 −2.41, 2.28 1.74, − 0.0072 7.5×10−4 弹性 −2.3 ± 29.5i
−0.56 ± 10.0i−2.68, 2.55 1.77, − 0.0036 7.4×10−4 4
(文献[43])刚性 −1.25, 1.20 弹性 −2.7 ± 49.3i
−0.38 ± 16.2i−1.42, 1.35
下载: 导出CSV
表 7 上升段任务参数要求
Table 7. Parameter requirements of ascending task
初始速度/(m·s−1) 初始高度/km 转模式速度/(m·s−1) 转模式高度/km 终端速度/(m·s−1) 终端高度/km 终端航迹角/(°) 100 0 1380 22.6 2500 50 5.7
下载: 导出CSV
表 8 不确定性及其偏差
Table 8. Uncertainties and deviations
结构
质量/kg质心轴向
偏移/mm质心法向
偏移/mm俯仰转动
惯量/%推力/% 推力线法向
偏移/mm推力线俯仰
偏斜/(')大气
密度/%轴向气动力
系数/%法向气动力
系数/%俯仰角加速率
测量偏差/%迎角测量
偏差/%±200 ±200 ±80 ±10 ±5 ±4 ±30 ±5 ±5 ±5 ±10 ±10
下载: 导出CSV
表 9 不确定性对任务性能的影响
Table 9. Effect of uncertainties on task performance
不确定性 结构
质量/kg质心轴向
偏移/mm质心法向
偏移/mm俯仰转动
惯量/%推力/% 推力线法向
偏移/mm推力线俯仰
偏斜/(')大气
密度/%轴向气动力
系数/%法向气动力
系数/%俯仰角加速率
测量偏差/%迎角测量
偏差/%与Vf的拟合
直线斜率−18 −3.1 −0.047 0.024 67 0.0093 0.57 1.0 −2.4 4.0 ≈ 0 0.049 与mf的拟合
直线斜率0.054 0.022 0.0014 ≈ 0 −0.22 5.1×10−4 7.4×10−4 0.016 0.025 −0.012 ≈ 0 −1.4×10−4
下载: 导出CSV
-
[1] 陈柏屹. 空天飞行器面向控制一体化的建模及多系统关联特性分析[D]. 南京: 南京航空航天大学, 2019.CHEN B Y. Control-oriented modeling and associated characteristic analysis for integrated design of aerospace vehicles[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019(in Chinese). [2] SZIROCZAK D, SMITH H. A review of design issues specific to hypersonic flight vehicles[J]. Progress in Aerospace Sciences, 2016, 84: 1-28. [3] 佘文学, 刘凯, 乔鸿. 组合动力空天飞行器制导技术发展分析[J]. 战术导弹技术, 2020(5): 52-65.SHE W X, LIU K, QIAO H. Development analysis of guidance technology for aerospace vehicle based on combination engine[J]. Tactical Missile Technology, 2020(5): 52-65(in Chinese). [4] JENKINS D R. X-15 extending the frontiers of flight[M]. Washington, D. C. : NASA, 2007: 1-10. [5] DOYLE J, LENZ K, PACKARD A. Design examples using μ-synthesis: space shuttle lateral axis FCS during reentry[C]//Proceedings of the Modelling, Robustness and Sensitivity Reduction in Control Systems. Berlin: Springer, 1987: 127-154. [6] 佘文学, 刘晓鹏, 刘凯. 桑格尔空天飞行器技术途径分析与思考[J]. 火箭推进, 2021, 47(6): 11-20.SHE W X, LIU X P, LIU K. Analysis and thinking on technical approach of Sanger aerospace vehicle[J]. Journal of Rocket Propulsion, 2021, 47(6): 11-20(in Chinese). [7] BURNS B A. HOTOL space transport for the twenty-first century[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 1990, 204(2): 101-110. [8] ZHANG T T, WANG Z G, HUANG W, et al. The overall layout of rocket-based combined-cycle engines: a review[J]. Journal of Zhejiang University: Science A, 2019, 20(3): 163-183. [9] ZUO F Y, MÖLDER S. Hypersonic wavecatcher intakes and variable-geometry turbine based combined cycle engines[J]. Progress in Aerospace Sciences, 2019, 106: 108-144. [10] DAI J, ZUO Q R. Key technologies for thermodynamic cycle of precooled engines: a review[J]. Acta Astronautica, 2020, 177: 299-312. [11] 张蒙正, 刘典多, 马海波, 等. PATR发动机关键技术与性能提升途径初探[J]. 推进技术, 2018, 39(9): 1921-1927.ZHANG M Z, LIU D D, MA H B, et al. Preliminary analysis on critical technology and performance improvement of PATR engine[J]. Journal of Propulsion Technology, 2018, 39(9): 1921-1927 (in Chinese). [12] LONGSTAFF R, BOND A. The SKYLON project[C]//Proceedings of the 17th AIAA International Space Planes and Hypersonic Systems and Technologies Conference. Reston: AIAA, 2011. [13] HELLMAN B M, BRADFORD J E, ST GERMAIN B D, et al. Two stage to orbit conceptual vehicle designs using the SABRE engine[C]//Proceedings of the AIAA SPACE 2016. Reston: AIAA, 2016. [14] STEELANT J, VARVILL R, WALTON C, et al. Achievements obtained for sustained hypersonic flight within the LAPCAT-II project[C]//Proceedings of the 20th AIAA International Space Planes and Hypersonic Systems and Technologies Conference. Reston: AIAA, 2015. [15] RODRÍGUEZ-SEGADE M, HERNÁNDEZ S, DÍAZ J. Multi-bubble scheme and structural analysis of a hypersonic stratospheric flight vehicle[J]. Aerospace Science and Technology, 2022, 124: 107514. [16] MARSHALL L, CORPENING G, SHERRILL R. A chief engineer’s view of the NASA X-43A scramjet flight test[C]//Proceedings of the AIAA/CIRA 13th International Space Planes and Hypersonics Systems and Technologies Conference. Reston: AIAA, 2005. [17] HANK J, MURPHY J, MUTZMAN R. The X-51A scramjet engine flight demonstration program[C]//Proceedings of the 15th AIAA International Space Planes and Hypersonic Systems and Technologies Conference. Reston: AIAA, 2008: 2540. [18] 郭建国, 胡冠杰, 郭宗易. 组合动力空天飞行器控制问题研究[J]. 空天技术, 2022(2): 27-41.GUO J G, HU G J, GUO Z Y. Research on control problems of combined power aerospace vehicle[J]. Aerospace Technology, 2022(2): 27-41(in Chinese). [19] 曹林. 吸气式高超声速飞行器轨迹跟踪控制方法研究[D]. 西安: 西北工业大学, 2018.CAO L. Research on trajectory tracking control method of air-breathing hypersonic vehicle[D]. Xi’an: Northwestern Polytechnical University, 2018(in Chinese). [20] 佘文学, 刘凯, 刘晶. 空天飞行器制导控制技术发展思考[J]. 战术导弹技术, 2017(4): 1-10.SHE W X, LIU K, LIU J. Thoughts on the development of guidance and control technology for aerospace vehicle[J]. Tactical Missile Technology, 2017(4): 1-10(in Chinese). [21] SHAUGHNESSY J D, PINCKNEY S Z, MCMINN J D, et al. Hypersonic vehicle simulation model: winged-cone configuration: NASA-TM-102610[R]. Washington, D. C. : NASA, 1990: 1-18. [22] MIRMIRANI M, WU C, CLARK A, et al. Airbreathing hypersonic flight vehicle modeling and control, review, challenges, and a CFD-based example[C]//Proceedings of the Workshop on Modeling and Control of Complex Systems. Laxenburg: IFAC Press, 2005: 1-15. [23] BOLENDER M, DOMAN D. A non-linear model for the longitudinal dynamics of a hypersonic air-breathing vehicle[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2005: 6255. [24] 安昊. 吸气式高超声速飞行器控制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017: 11-77.AN H. Research on control methods of air-breathing hypersonic vehicles[D]. Harbin: Harbin Institute of Technology, 2017: 11-77(in Chinese). [25] LI Z Y, SHI S. L1 adaptive loss fault tolerance control of unmanned hypersonic aircraft with elasticity[J]. Aerospace, 2021, 8(7): 176. [26] 宋征宇, 潘豪, 王聪, 等. 长征运载火箭飞行控制技术的发展[J]. 宇航学报, 2020, 41(7): 868-879.SONG Z Y, PAN H, WANG C, et al. Development of flight control technology of long March launch vehicles[J]. Journal of Astronautics, 2020, 41(7): 868-879(in Chinese). [27] UR REHMAN O, PETERSEN I R, FIDAN B. Feedback linearization-based robust nonlinear control design for hypersonic flight vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2013, 227(1): 3-11. [28] GAO G, WANG J Z. Observer-based fault-tolerant control for an air-breathing hypersonic vehicle model[J]. Nonlinear Dynamics, 2014, 76(1): 409-430. [29] 闫斌斌, 林泽淮, 刘双喜, 等. 基于动态逆控制的高超声速飞行器飞/发一体化控制方法研究[J]. 西北工业大学学报, 2023, 41(5): 878-886.YAN B B, LIN Z H, LIU S X, et al. Research on integrated aircraft-engine control method of hypersonic vehicle based on dynamic inversion control[J]. Journal of Northwestern Polytechnical University, 2023, 41(5): 878-886(in Chinese). [30] ZHANG S, WANG Q, YANG G, et al. Anti-disturbance backstepping control for air-breathing hypersonic vehicles based on extended state observer[J]. ISA Transactions, 2019, 92: 84-93. [31] YU C J, JIANG J, ZHEN Z Y, et al. Adaptive backstepping control for air-breathing hypersonic vehicle subject to mismatched uncertainties[J]. Aerospace Science and Technology, 2020, 107: 106244. [32] 林伟. 吸气式高超声速飞行器抗动态饱和自适应滑模控制研究[D]. 北京: 北京航空航天大学, 2020.LIN W. Research of adaptive sliding mode control for air-breathing hypersonic vehicles with dynamic saturation[D]. Beijing: Beihang University, 2020(in Chinese). [33] DING Y B, WANG X G, BAI Y L, et al. An improved continuous sliding mode controller for flexible air-breathing hypersonic vehicle[J]. International Journal of Robust and Nonlinear Control, 2020, 30(14): 5751-5772. [34] WANG Y Y, YANG X X, YAN H C. Reliable fuzzy tracking control of near-space hypersonic vehicle using aperiodic measurement information[J]. IEEE Transactions on Industrial Electronics, 2019, 66(12): 9439-9447. [35] CHAI R Q, TSOURDOS A, SAVVARIS A, et al. Six-DOF spacecraft optimal trajectory planning and real-time attitude control: a deep neural network-based approach[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(11): 5005-5013. [36] 武天才, 王宏伦, 任斌, 等. 考虑规避与突防的高超声速飞行器智能容错制导控制一体化设计[J]. 航空学报, 2024, 45(15): 329607.WU T C, WANG H L, REN B, et al. Learning-based integrated fault-tolerant guidance and control for hypersonic vehicles considering avoidance and penetration[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329607(in Chinese). [37] PAN L, PENG S C, XIE Y, et al. 3D guidance for hypersonic reentry gliders based on analytical prediction[J]. Acta Astronautica, 2020, 167: 42-51. [38] 许东欢, 徐桂甲, 叶赛仙, 等. 基于伪谱法的空天飞行器上升段非线性闭环最优制导算法[J]. 战术导弹技术, 2017(4): 57-65.XU D H, XU G J, YE S X, et al. Nonlinear closed-loop optimal ascent guidance for aerospace vehicle based on pseudospectral method[J]. Tactical Missile Technology, 2017(4): 57-65(in Chinese). [39] ZHOU H Y, WANG X G, SHAN W Z, et al. Ascent guidance law for a horizontal take-off vehicle with a multi-combined cycle engine[J]. Advances in Space Research, 2020, 65(1): 379-391. [40] LI M M, HU J, HUANG H. A segmented and weighted adaptive predictor-corrector guidance method for the ascent phase of hypersonic vehicle[J]. Aerospace Science and Technology, 2020, 106: 106231. [41] 周建兴, 张浩成, 高启滨, 等. 基于SABRE技术的高超声速预冷飞行器应用分析[J]. 推进技术, 2018, 39(10): 2196-2206.ZHOU J X, ZHANG H C, GAO Q B, et al. Analysis of vehicle applications propelled by SABRE-based precooling hypersonic engine[J]. Journal of Propulsion Technology, 2018, 39(10): 2196-2206 (in Chinese). [42] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 航天飞行器常用坐标系 : GB/T 32296-2015[S]. 北京: 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会, 2015-12-31.General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China, Standardization Administration of the People’s Republic of China. General coordinates for space vehicle: GB/T 32296-2015[S]. Beijing: General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China, Standardization Administration of the People’s Republic of China, 2015-12-31(in Chinese). [43] BOLENDER M A, DOMAN D B. Nonlinear longitudinal dynamical model of an air-breathing hypersonic vehicle[J]. Journal of Spacecraft and Rockets, 2007, 44(2): 374-387. [44] CHAVEZ F R, SCHMIDT D K. Analytical aeropropulsive-aeroelastic hypersonic-vehicle model with dynamic analysis[J]. Journal of Guidance, Control, and Dynamics, 1994, 17(6): 1308-1319. [45] MEIROVITCH L. Analytical methods in vibrations[M]. New York: Macmillan, 1967: 161-166. [46] 肖业伦. 航空航天器运动的建模: 飞行动力学的理论基础[M]. 北京: 北京航空航天大学出版社, 2003: 38-51.XIAO Y L. Modeling of aerospace vehicle motion: theoretical basis of flight dynamics[M]. Beijing: Beijing University of Aeronautics & Astronautics Press, 2003: 38-51(in Chinese). [47] LU P, VAN KAMPEN E J, DE VISSER C, et al. Aircraft fault-tolerant trajectory control using Incremental Nonlinear Dynamic Inversion[J]. Control Engineering Practice, 2016, 57: 126-141. [48] 陈海兵, 张曙光, 方振平. 加速度反馈的隐式动态逆鲁棒非线性控制律设计[J]. 航空学报, 2009, 30(4): 597-603.CHEN H B, ZHANG S G, FANG Z P. Implicit NDI robust nonlinear control design with acceleration feedback[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(4): 597-603(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 413
- HTML全文浏览量: 210
- PDF下载量: 11
- 被引次数: 0
