



Small unmanned aerial vehicles path planning method considering urban low-altitude wind fields
-
摘要:
随着无人机(UAV)在城市物流配送中的广泛应用,无人机航路运行安全逐渐引发关注。针对城市风场引发的无人机安全与效率问题,结合物流无人机运行特点,使用计算流体力学(CFD)方法估计城市风场,从飞行安全、无人机速度变化、建筑物周边湍流区等角度分析风场对无人机的影响,构建路径规划模型,并提出改进的Theta*求解算法。以深圳市龙岗区中心商务区为研究场景,基于历史主导风进行城市风场仿真,划设飞行风险区与障碍物影响范围,并使用所提方法在不同风场中规划无人机路径。结果显示:构建的路径规划模型有效识别了空域内的高风速区与湍流区,在考虑风场对无人机速度影响并避开飞行禁区的基础上,相比于以最小化距离为目标的无人机路径规划模型降低了9.27%的飞行时间;所提算法在路径距离与飞行时间优于传统算法的同时,减少了31.78%的拐点数量与62.63%的计算时间。
Abstract:The operational safety of drone routes has gained more attention as unmanned aerial vehicles (UAVs) are used extensively in urban logistics. Addressing the safety and efficiency issues caused by urban wind fields, this paper integrates the operational characteristics of logistics drones and employs computational fluid dynamics (CFD) to estimate urban wind fields. The impact of wind fields on UAVs is analyzed from the perspectives of flight safety, variations in drone speed, and turbulence zones around buildings. A path planning model is constructed, and an improved Theta* algorithm is proposed. The study takes the central business district of Longgang District, Shenzhen, as the research scenario. Simulations of urban wind fields are conducted based on historical prevailing winds to delineate hazardous flight regions and the influence range of obstacles within the wind field. The proposed method is then used to plan drone routes under different wind field conditions. Results show that the constructed path planning model effectively identifies high wind speed and turbulent areas within the airspace. When compared to routes designed to minimize distance, the drone route saves flying time by 9.27% by taking into account how wind fields affect drone speed and avoiding no-fly zones. Additionally, the proposed algorithm outperforms traditional algorithms in terms of route distance and flight time, and reduces the number of turns by 31.78% and computation time by 62.63%.
-
Key words:
- unmanned aerial vehicle /
- urban wind field /
- path planning /
- logistics distribution /
- urban air mobility
-
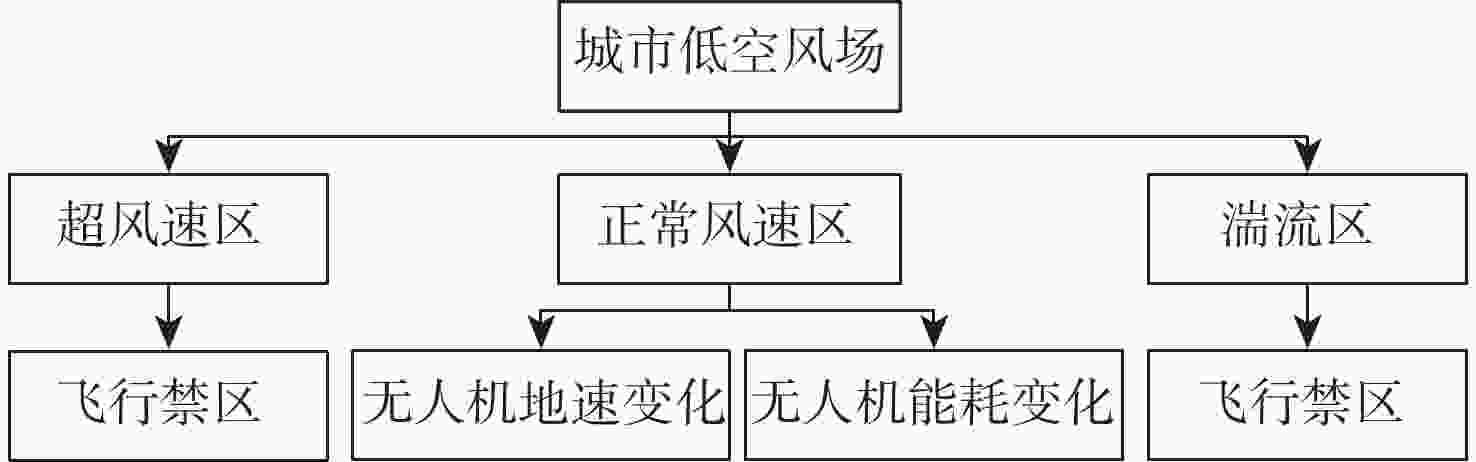
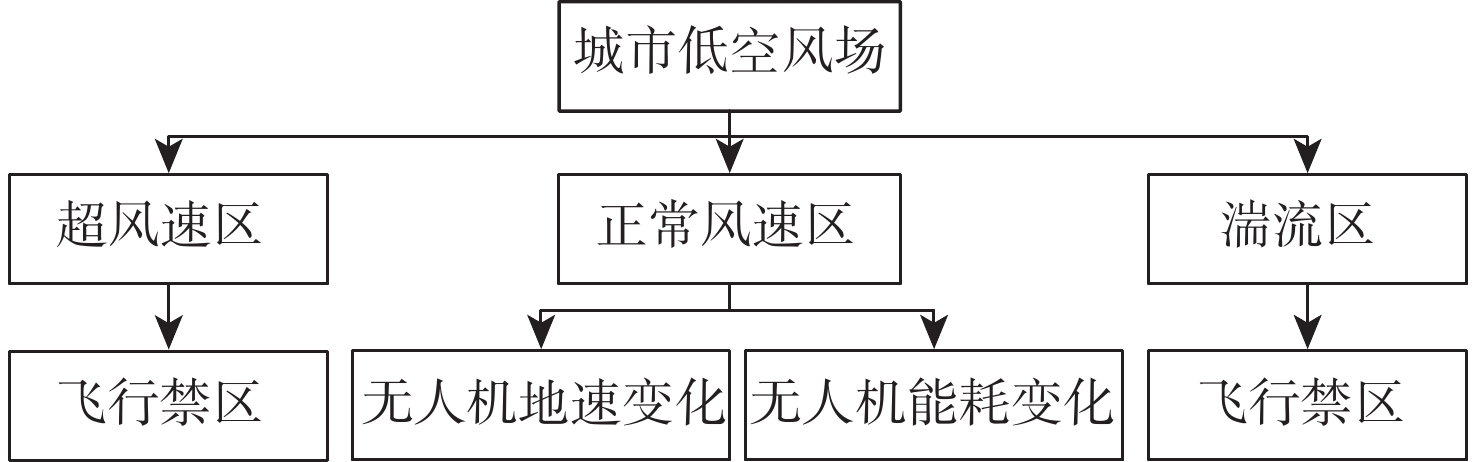
图 1 城市低空风场对无人机运行影响
Figure 1. Impact of urban low-attitude wind fields on UAV operations
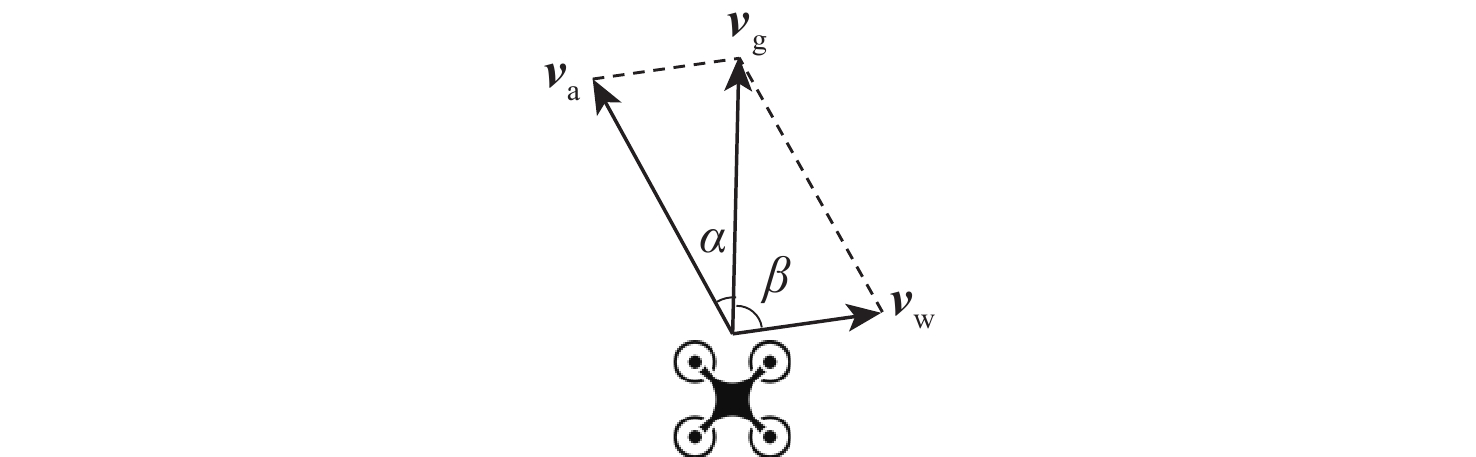
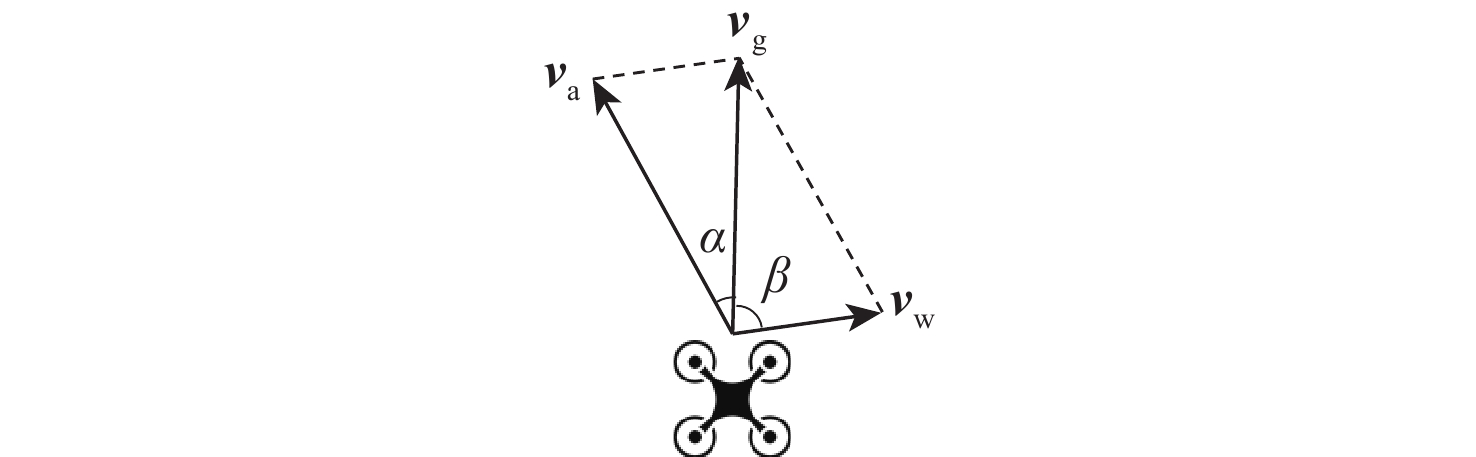
图 2 无人机空速、地速与风速关系
Figure 2. Relationship between UAV airspeed, ground speed, and wind speed
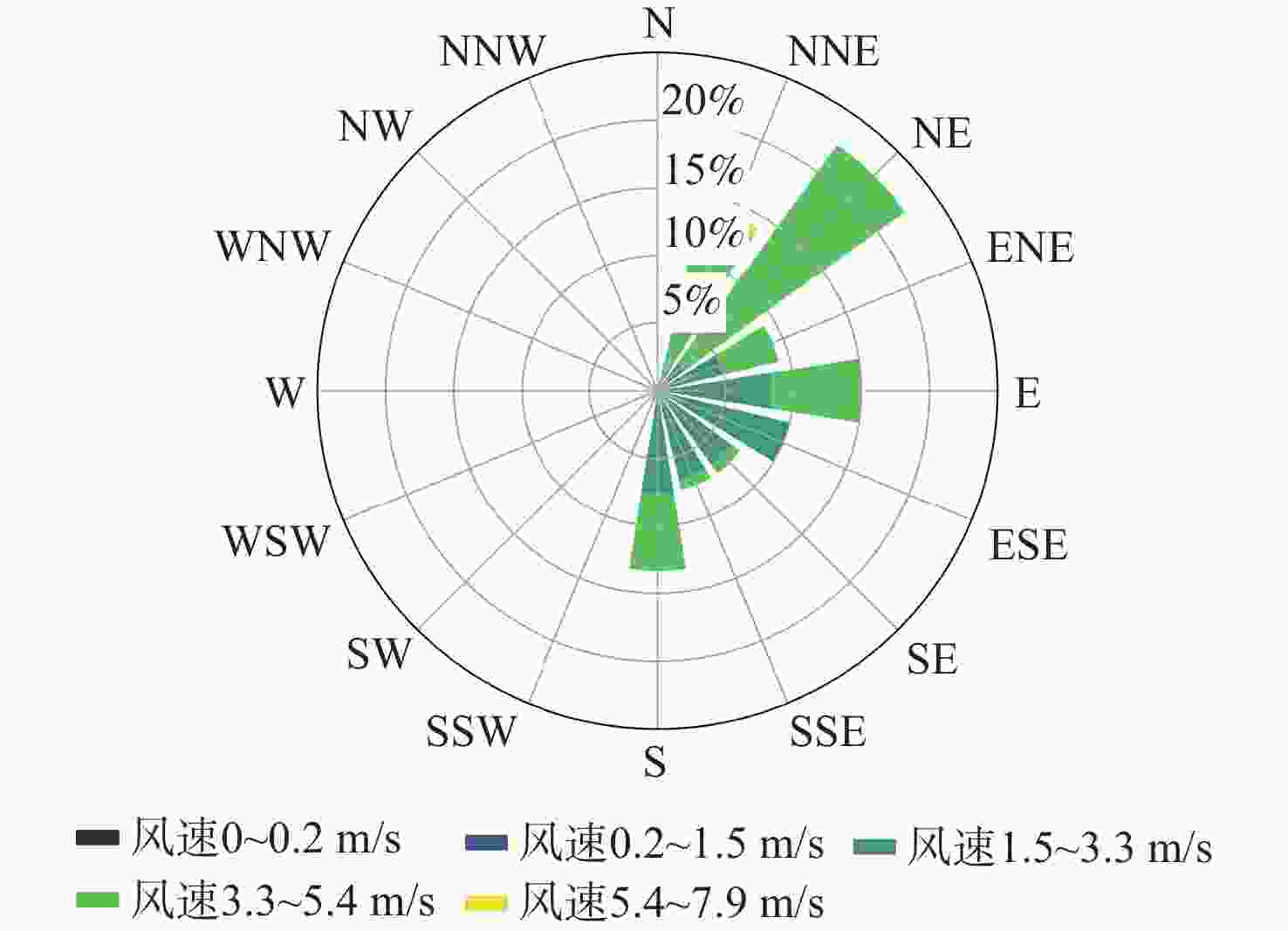
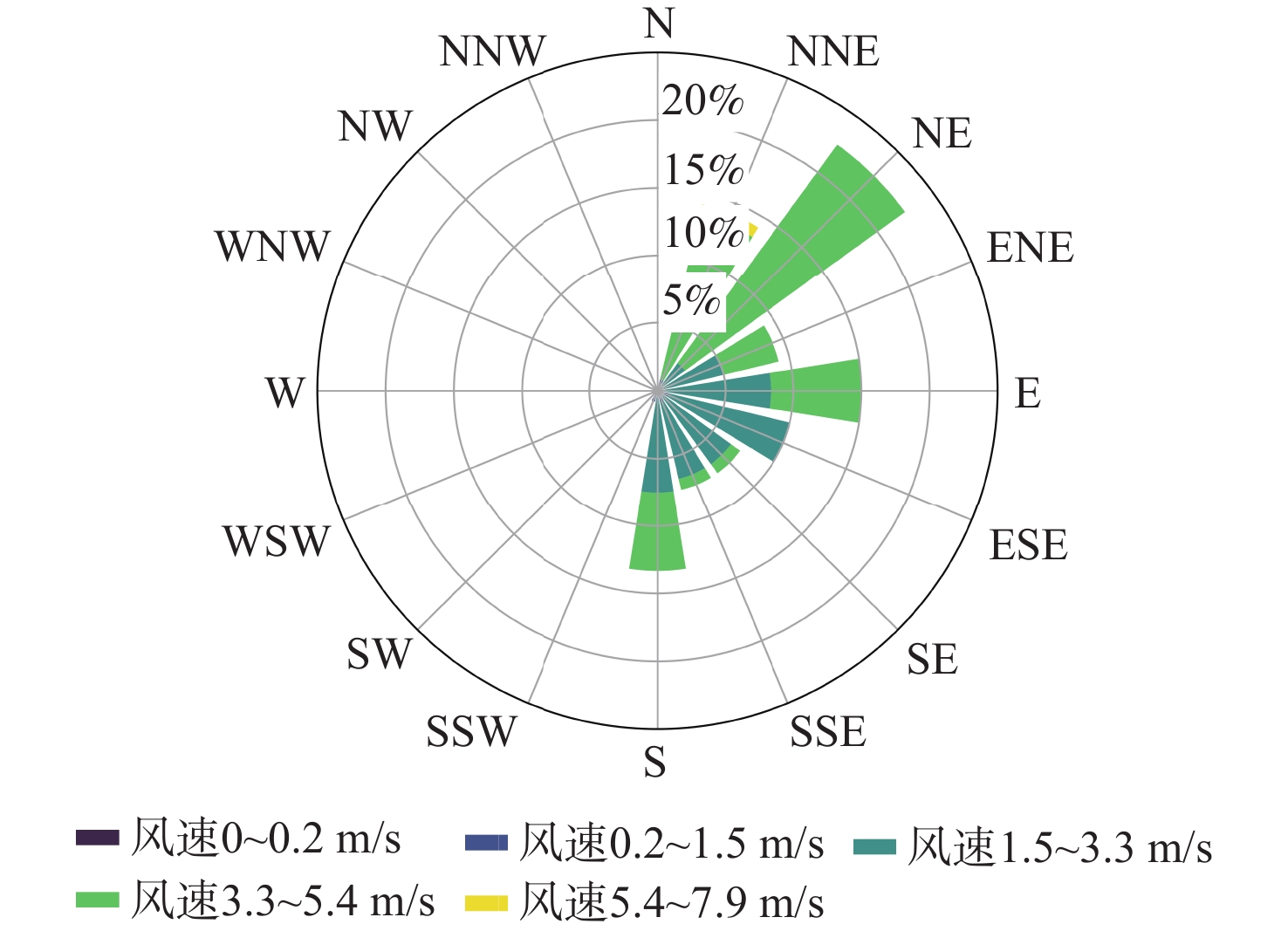
图 7 研究区域主导风风速、风向特征
Figure 7. Characteristics of prevailing wind speed and direction in study area
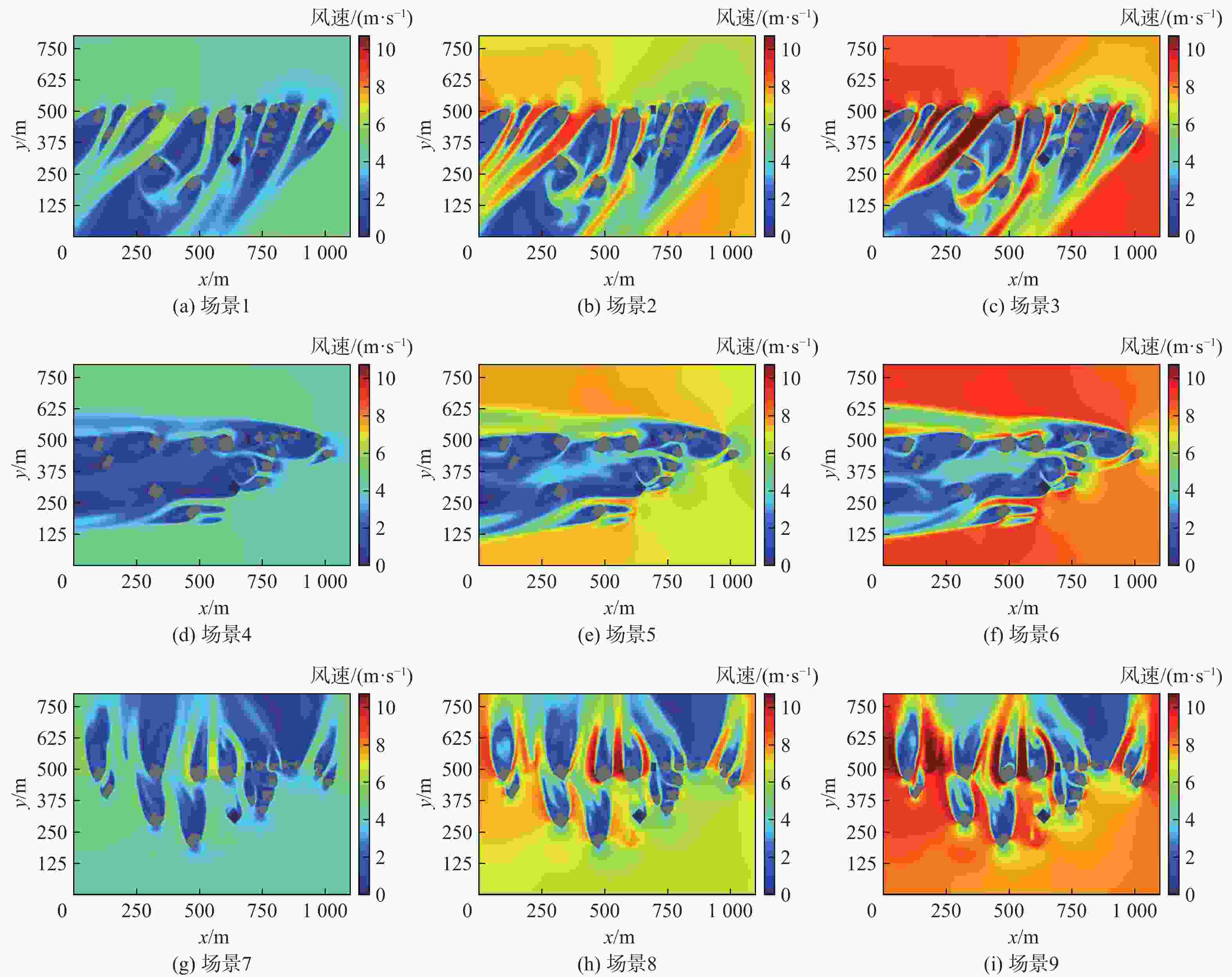
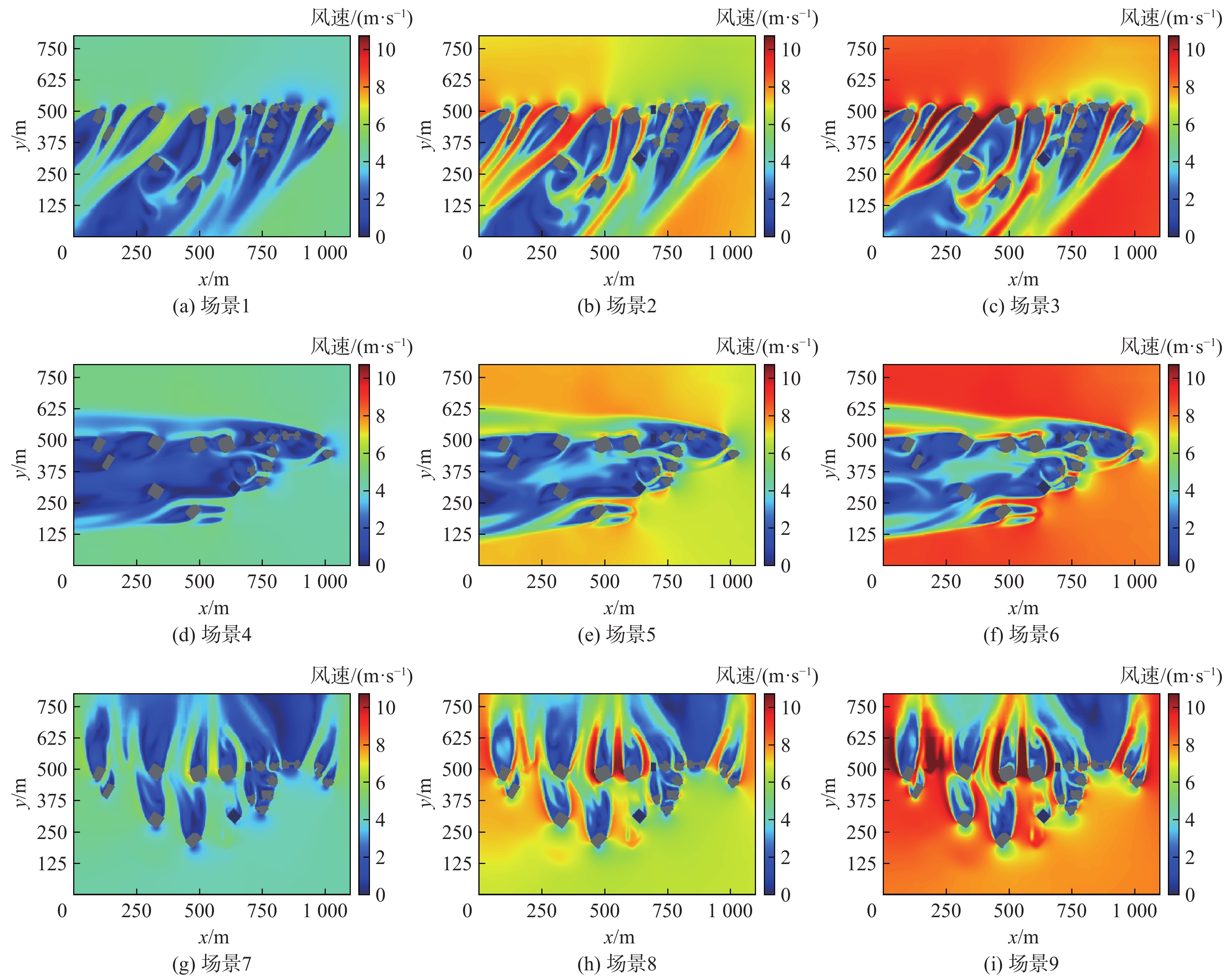
图 8 不同主导风下100 m高度风速热力图
Figure 8. Heatmap of wind speeds at 100 m altitude under different prevailing winds
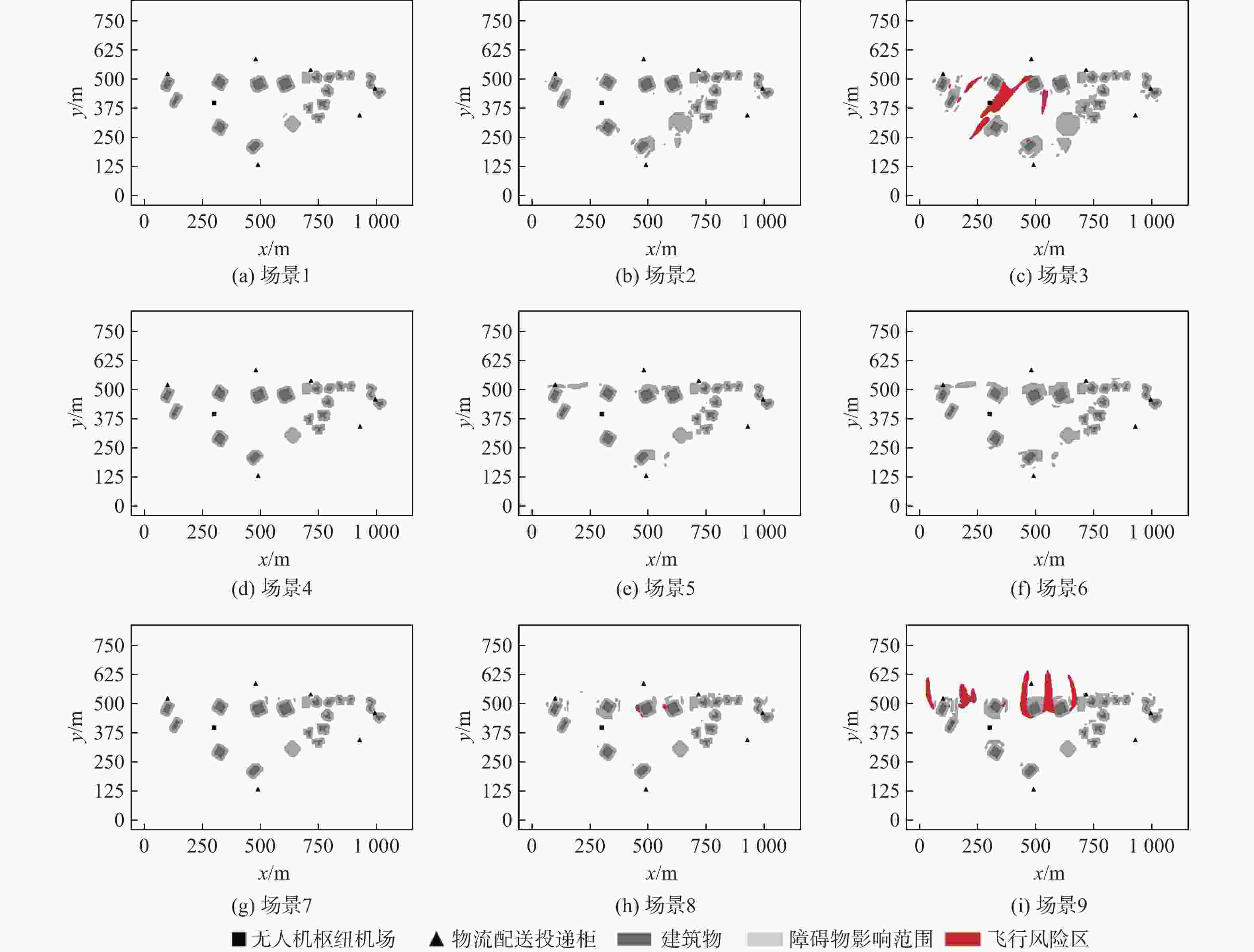
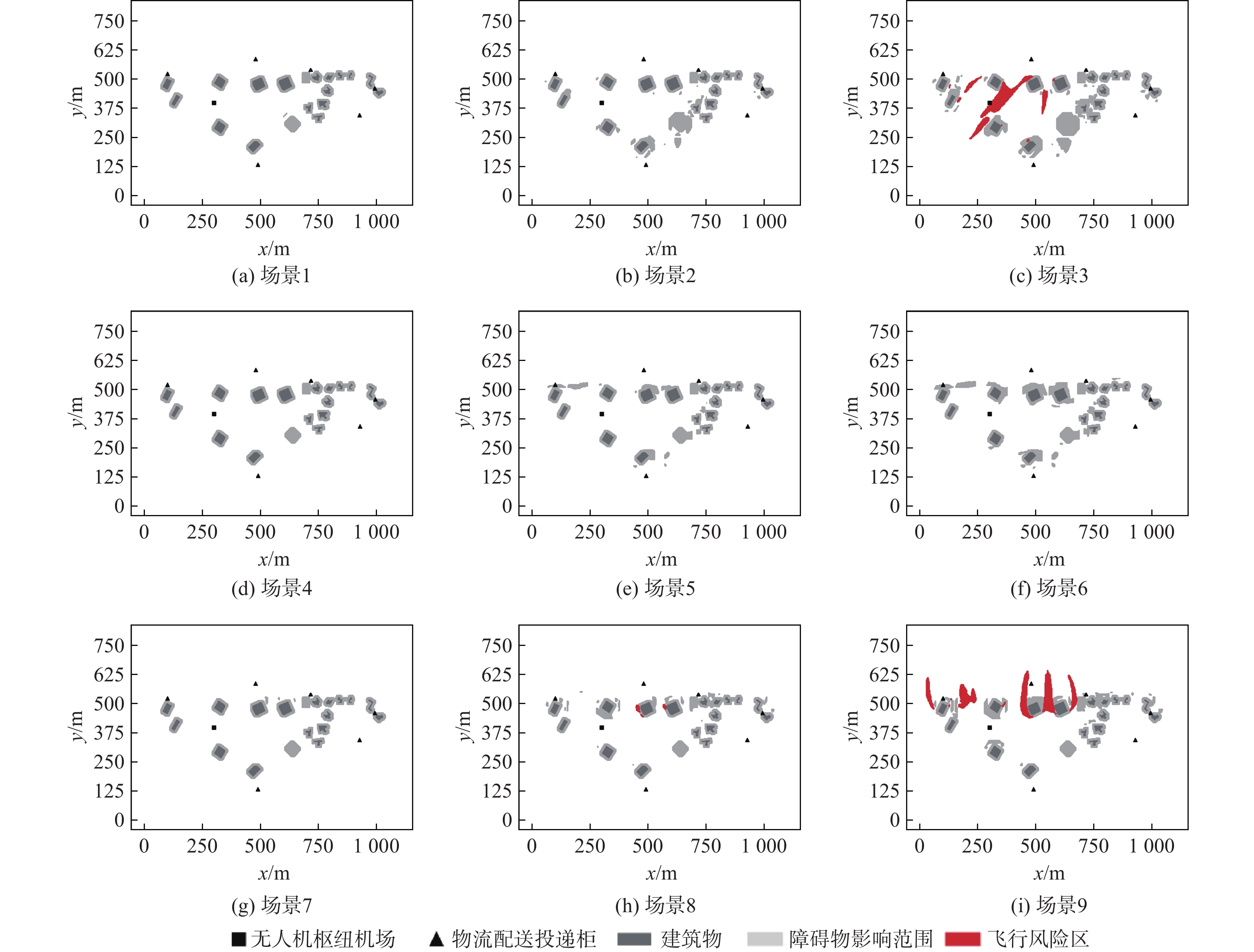
图 9 不同主导风下100 m高度飞行风险区与障碍物影响范围
Figure 9. Hazardous flight regions and obstacle impact zones at 100 m altitude under different prevailing winds
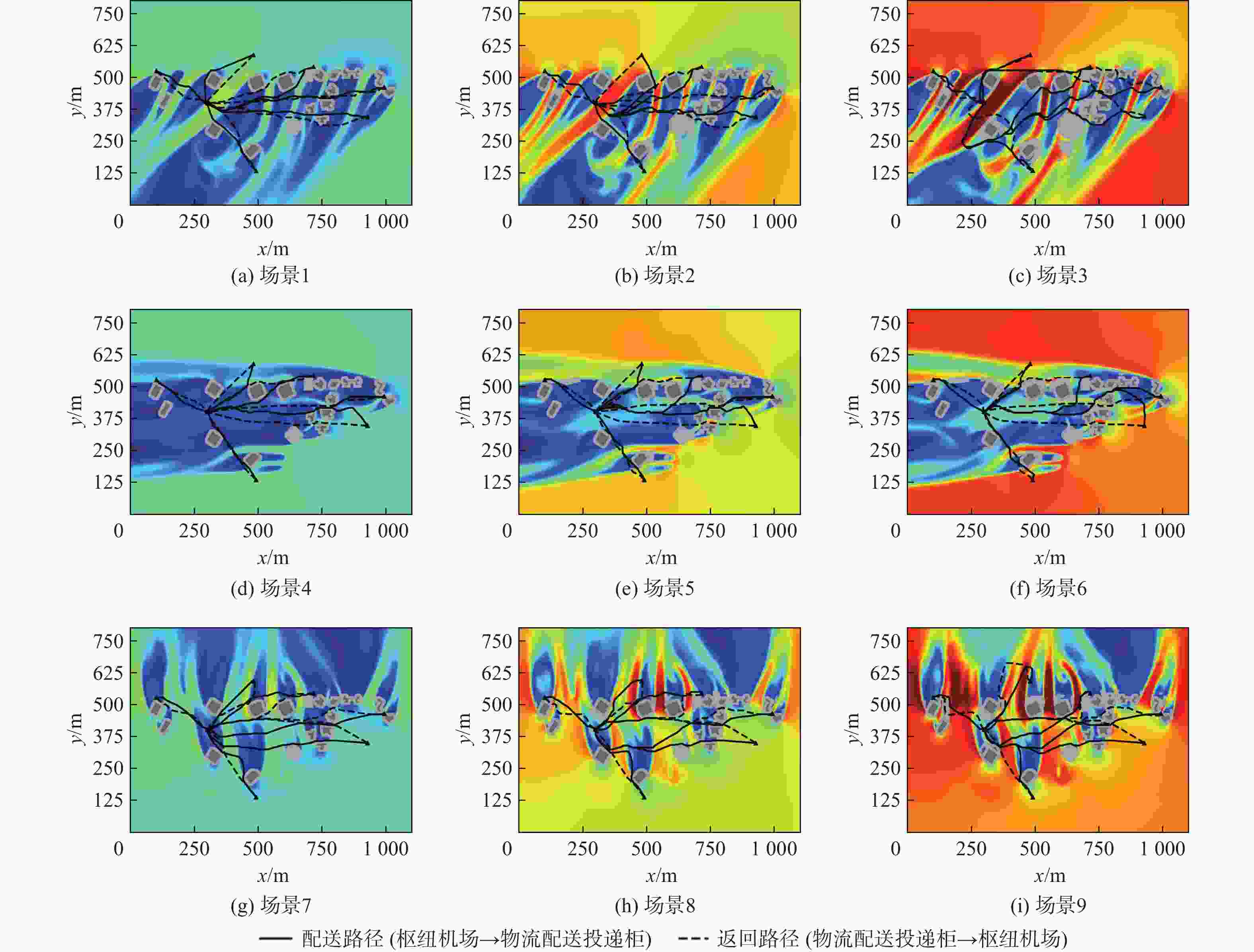
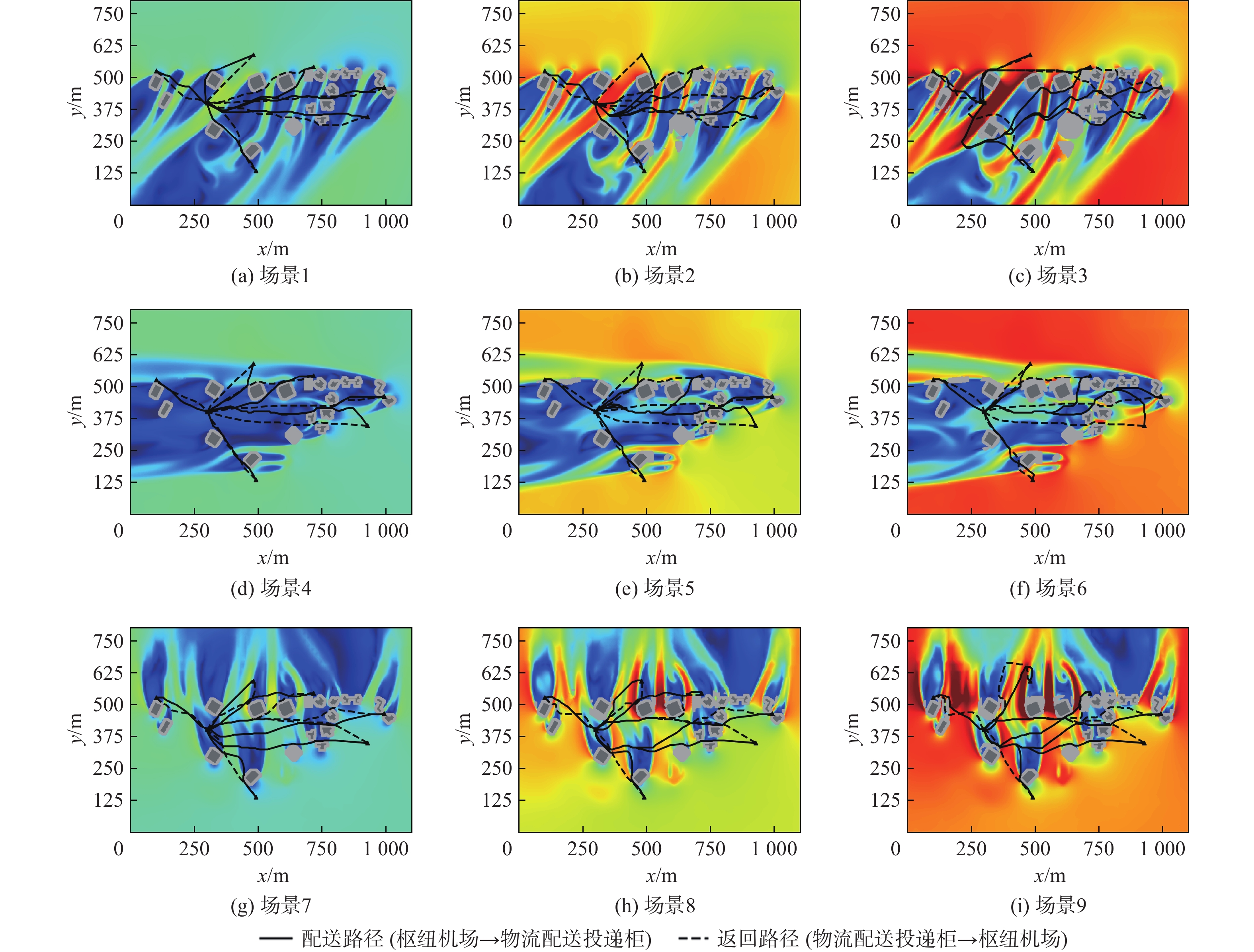
图 10 不同主导风下100 m高度路径规划结果
Figure 10. Path planning results at 100 m altitude under different prevailing winds
表 1 CFD风场仿真输入风速、风向
Table 1. Input wind speed and direction for CFD wind field simulation
主导风风向 主导风风速/(m·s−1) 风力级数 场景编号 东北风 4.3 3级风 场景1 6.7 4级风 场景2 8.0 5级风 场景3 东风 4.3 3级风 场景4 6.7 4级风 场景5 8.0 5级风 场景6 南风 4.3 3级风 场景7 6.7 4级风 场景8 8.0 5级风 场景9  下载: 导出CSV
下载: 导出CSV
表 2 路径规划模型参数
Table 2. Path planning model parameters
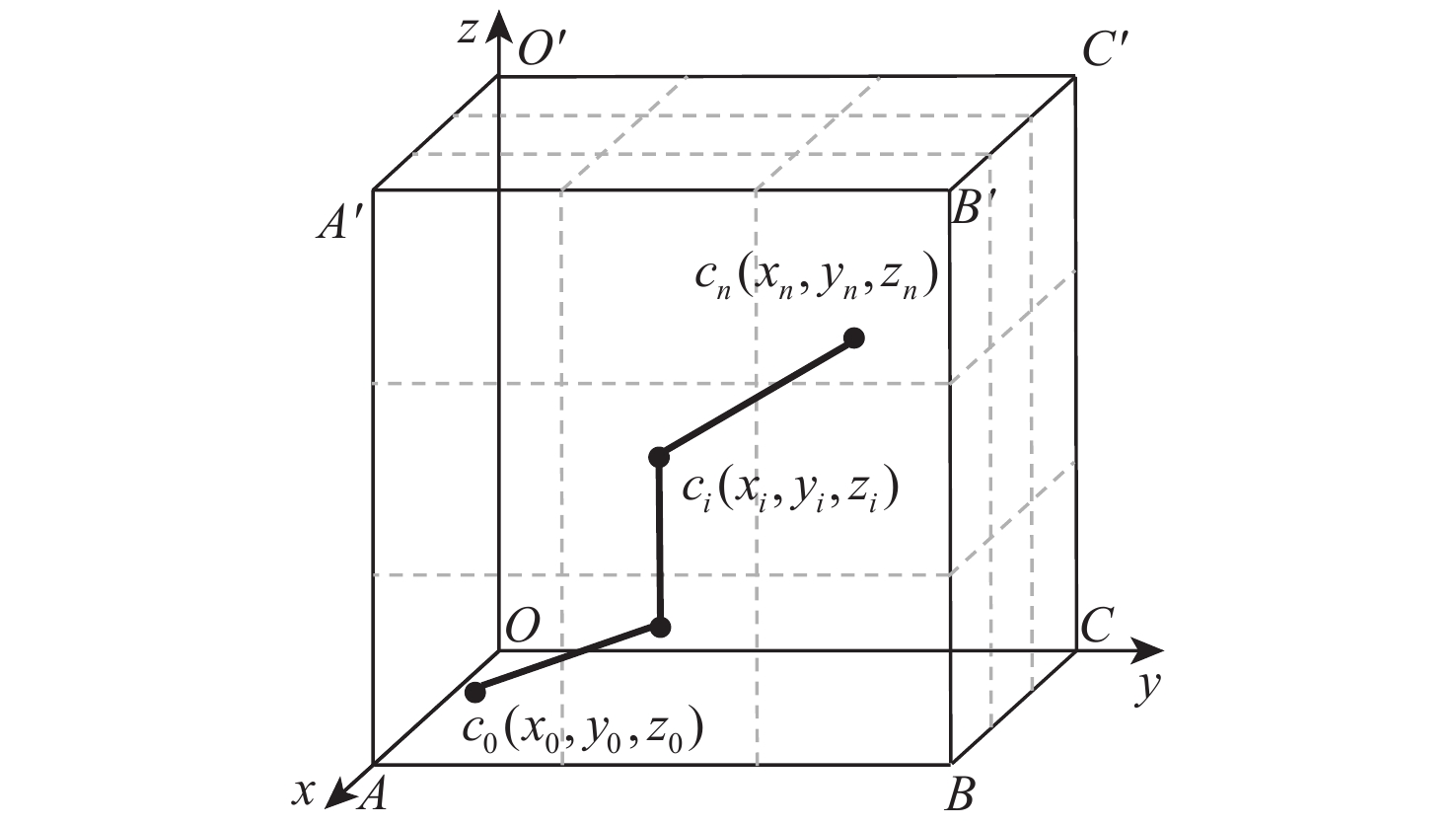
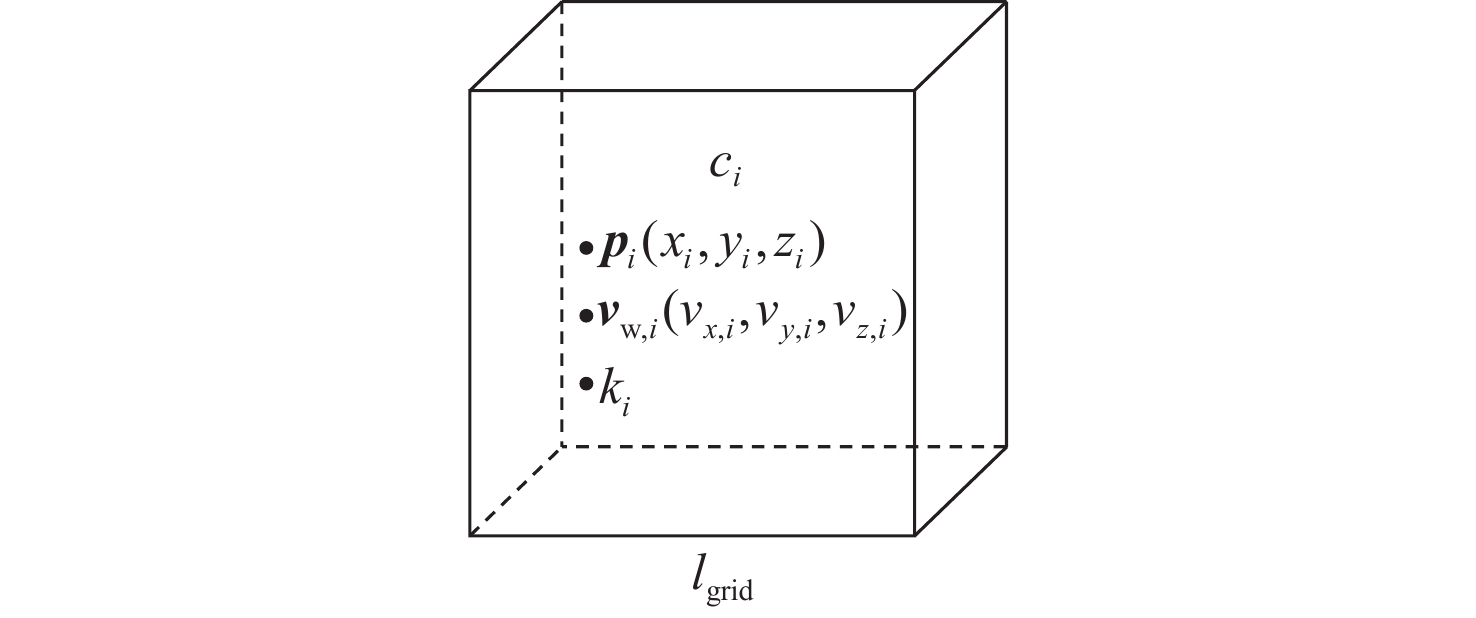
参数 取值 风场在$ {c}_{i} $处风速$ {\boldsymbol{v}}_{{\mathrm{w}},i} $ CFD仿真结果 无人机在$ {c}_{i} $处空速$ {\boldsymbol{v}}_{{\mathrm{a}},i} $ 大小为12.5 m/s 无人机在$ {c}_{i} $处地速$ {\boldsymbol{v}}_{{\mathrm{g}},i} $ 由式(8)与式(9)计算 风场在$ {c}_{i} $处湍流动能$ {k}_{i} $ CFD仿真结果 最小路径段长度$ {l}_{\min } $/m 2.5 无人机最大航程$ {L}_{\max } $/m 3000 无人机最大转弯角$ {\beta }_{\max } $/rad $ \text{π}/2 $ 无人机最低飞行高度$ {H}_{\min } $/m 60 无人机最高飞行高度$ {H}_{\max } $/m 120 无人机可承受最大风速$ {v}_{{\mathrm{w}},{\mathrm{res}}} $/(m·s−1) 10.7 湍流动能阈值$ {k}_{{\mathrm{res}}} $/(m2·s−2) 1.5 湍流动能检测半径$ {r}_{k} $/m 20 建筑物安全缓冲区半径$ {r}_{{\mathrm{bld}}} $/m 5 空域模型栅格大小$ {l}_{{\mathrm{gird}}} $/m 2.5 建筑物栅格集合$ {C}_{{\mathrm{bld}}} $ 三维城市模型 无人机禁飞区栅格集合$ {C}_{{\mathrm{no}\text-\mathrm{fly}}} $ 空域栅格模型
下载: 导出CSV
表 3 不同主导风下航路数据
Table 3. Route data under different prevailing winds
主导风风向 场景编号 平均路径距离/m 配送/返回路径距离/m 平均飞行时间/s 配送/返回飞行时间/s 东北风 场景1 452.55 459.32/445.79 36.19 39.25/33.12 场景2 469.19 480.15/458.23 38.15 42.93/33.38 场景3 630.47 694.95/565.99 48.18 56.82/39.54 东风 场景4 447.23 455.80/438.66 35.21 38.51/31.91 场景5 455.53 468.09/442.97 35.64 40.98/30.30 场景6 479.07 497.12/461.01 36.92 42.98/30.86 南风 场景7 451.47 452.24/450.69 35.98 35.81/36.16 场景8 489.72 487.92/491.53 39.22 38.07/40.37 场景9 563.36 560.47/566.24 44.58 42.78/46.39
下载: 导出CSV
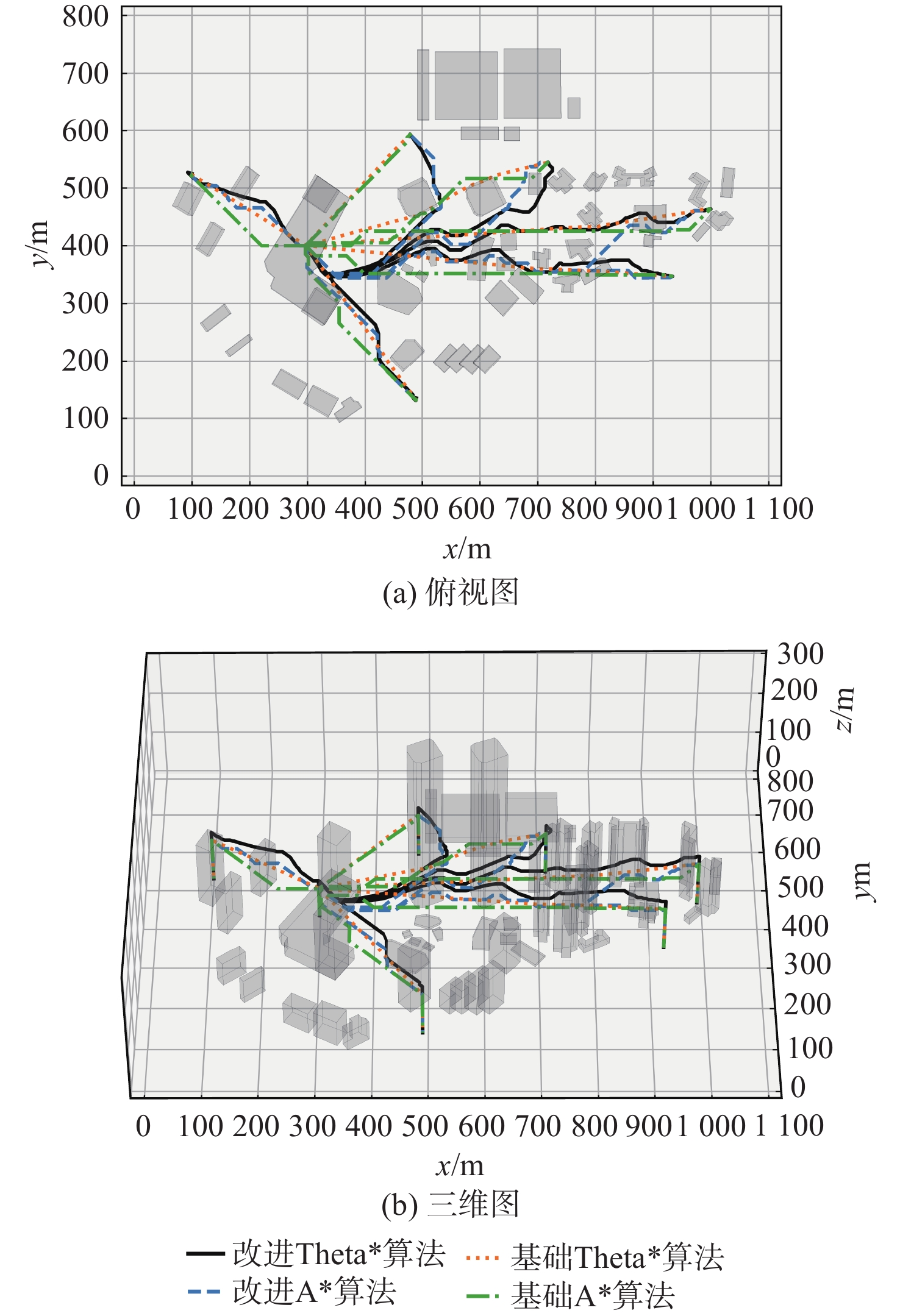
表 4 不同算法路径规划结果对比
Table 4. Comparison of path planning results using different algorithms
算法 路径距离/m 飞行时间/s 飞行风险区/m 障碍物影响范围/m 拐点数 计算时间/s 不可通行路径条数 改进Theta*算法 482.81 38.45 11.25 1.85 0 改进A*算法 495.42 39.09 16.49 4.95 0 基础Theta*算法 432.07 42.38 7.46 41.00 0.22 0.08 3 基础A*算法 450.28 43.98 6.40 37.42 6.67 0.07 3
下载: 导出CSV
-
[1] AGGARWAL S, KUMAR N. Path planning techniques for unmanned aerial vehicles: a review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270-299. [2] DAI W, PANG B Z, LOW K H. Conflict-free four-dimensional path planning for urban air mobility considering airspace occupancy[J]. Aerospace Science and Technology, 2021, 119: 107154. [3] PANG B Z, HU X T, DAI W, et al. UAV path optimization with an integrated cost assessment model considering third-party risks in metropolitan environments[J]. Reliability Engineering & System Safety, 2022, 222: 108399. [4] DELAMER J A, WATANABE Y, CHANEL C P C. Safe path planning for UAV urban operation under GNSS signal occlusion risk[J]. Robotics and Autonomous Systems, 2021, 142: 103800. [5] HE X Y, HE F, LI L S, et al. A route network planning method for urban air delivery[J]. Transportation Research Part E: Logistics and Transportation Review, 2022, 166: 102872. [6] MURRAY C W A, IRELAND M L, ANDERSON D. On the response of an autonomous quadrotor operating in a turbulent urban environment[C]//Proceedings of the AUVSI’s Unmanned Systems Conference. Orlando: AUVSI, 2014. [7] MCGRATH B, CYBYK B Z, FREY T M. Environment-vehicle interaction modeling for unmanned aerial system operations in complex airflow environments[J]. Johns Hopkins APL Technical Digest, 2012, 32(2): 115-131. [8] THIBBOTUWAWA A, NIELSEN P, ZBIGNIEW B, et al. Energy consumption in unmanned aerial vehicles: a review of energy consumption models and their relation to the UAV routing[C]//Proceedings of 39th International Conference on Information Systems Architecture and Technology. Berlin: Springer, 2019: 173-184. [9] GALWAY D, ETELE J, FUSINA G. Modeling of the urban gust environment with application to autonomous flight: AIAA 2008-6565[R]. Reston: AIAA, 2008. [10] SUTHERLAND M. Urban wake field generation using LES for application to quadrotor flight[D]. Ottawa: Carleton University, 2015. [11] RAZA S A. Autonomous UAV control for low-altitude flight in an urban gust environment[D]. Ottawa: Carleton University, 2015: 40-147. [12] LIU S M, PAN W X, ZHANG H, et al. CFD simulations of wind distribution in an urban community with a full-scale geometrical model[J]. Building and Environment, 2017, 117: 11-23. [13] KANG G, KIM J J, CHOI W. Computational fluid dynamics simulation of tree effects on pedestrian wind comfort in an urban area[J]. Sustainable Cities and Society, 2020, 56: 102086. [14] YANG L, LIU X D, QIAN F, et al. Research on the wind environment and air quality of parallel courtyards in a university campus[J]. Sustainable Cities and Society, 2020, 56: 102019. [15] JUNG J, DSOUZA S N, JOHNSON M A, et al. Applying required navigation performance concept for traffic management of small unmanned aircraft systems[C]//Proceedings of the Congress of the International Council of the Aeronautics Sciences. Daejeon: Korean Society for Aeronautical and Space Sciences, 2016. [16] JEONG S, YOU K, SEOK D. Hazardous flight region prediction for a small UAV operated in an urban area using a deep neural network[J]. Aerospace Science and Technology, 2021, 118: 107060. [17] GIERSCH S, EL GUERNAOUI O, RAASCH S, et al. Atmospheric flow simulation strategies to assess turbulent wind conditions for safe drone operations in urban environments[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2022, 229: 105136. [18] RUBIO-HERVAS J, GUPTA A, ONG Y S. Data-driven risk assessment and multicriteria optimization of UAV operations[J]. Aerospace Science and Technology, 2018, 77: 510-523. [19] ALTUN A T, XU Y, INALHAN G, et al. Comprehensive risk assessment and utilization for contingency management of future AAM system: AIAA 2023-3687[R]. Reston: AIAA, 2023. [20] WARE J, ROY N. An analysis of wind field estimation and exploitation for quadrotor flight in the urban canopy layer[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2016: 1507-1514. [21] THANELLAS G A, MOULIANITIS V C, ASPRAGATHOS N A. A spatially wind aware quadcopter (UAV) path planning approach[J]. IFAC-PapersOnLine, 2019, 52(8): 283-288. [22] HONG D, LEE S, CHO Y H, et al. Energy-efficient online path planning of multiple drones using reinforcement learning[J]. IEEE Transactions on Vehicular Technology, 2021, 70(10): 9725-9740. [23] MIKHAILUTA S V, LEZHENIN A A, PITT A, et al. Urban wind fields: Phenomena in transformation[J]. Urban Climate, 2017, 19: 122-140. [24] 张洪海, 李翰, 刘皞, 等. 城市区域物流无人机路径规划[J]. 交通运输系统工程与信息, 2020, 20(6): 22-29.ZHANG H H, LI H, LIU H, et al. Path planning for logistics unmanned aerial vehicle in urban area[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(6): 22-29(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1099
- HTML全文浏览量: 395
- PDF下载量: 21
- 被引次数: 0
