



Displacement sensorless control of electromagnetic linear actuator based on an improved sliding mode observer
-
摘要:
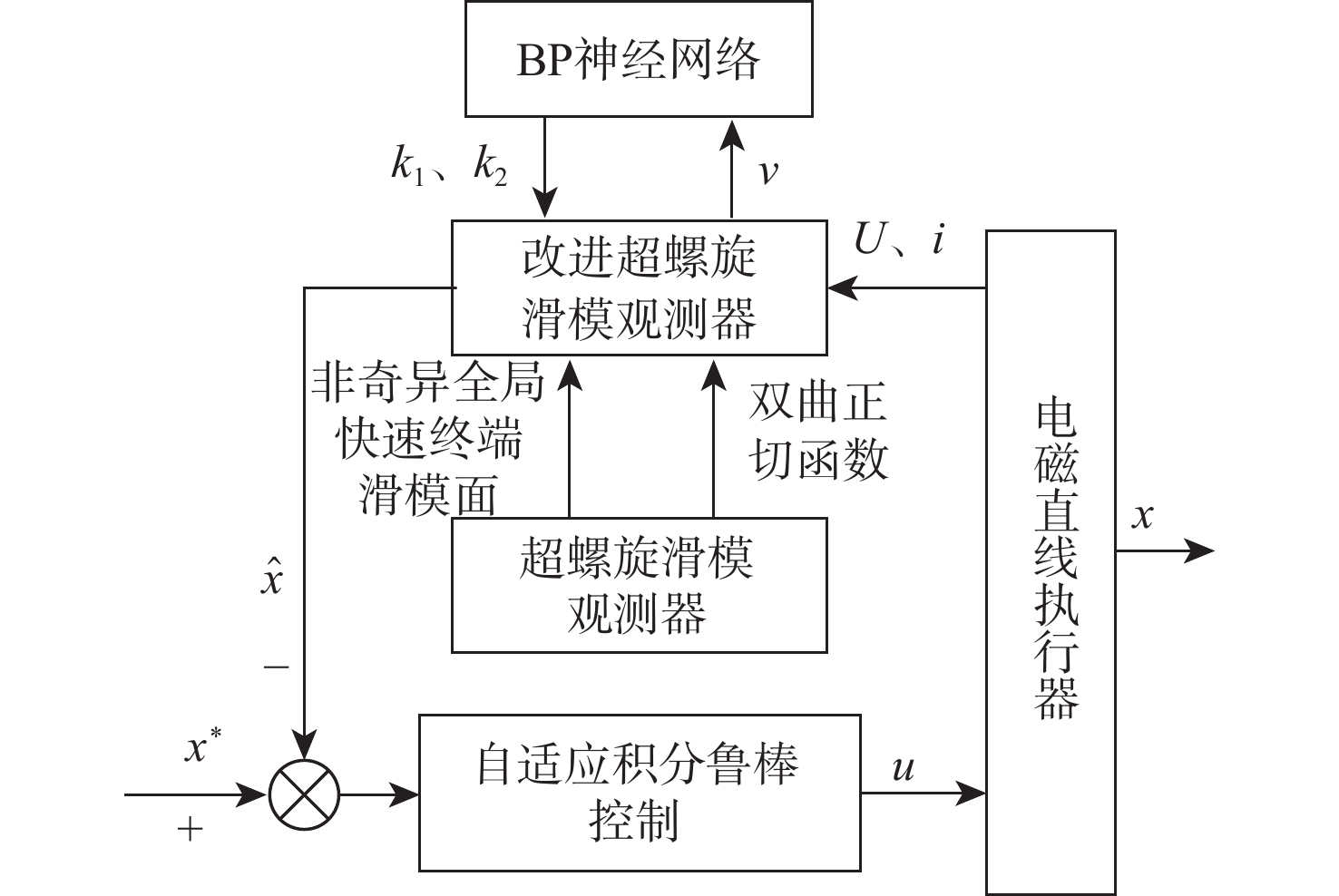
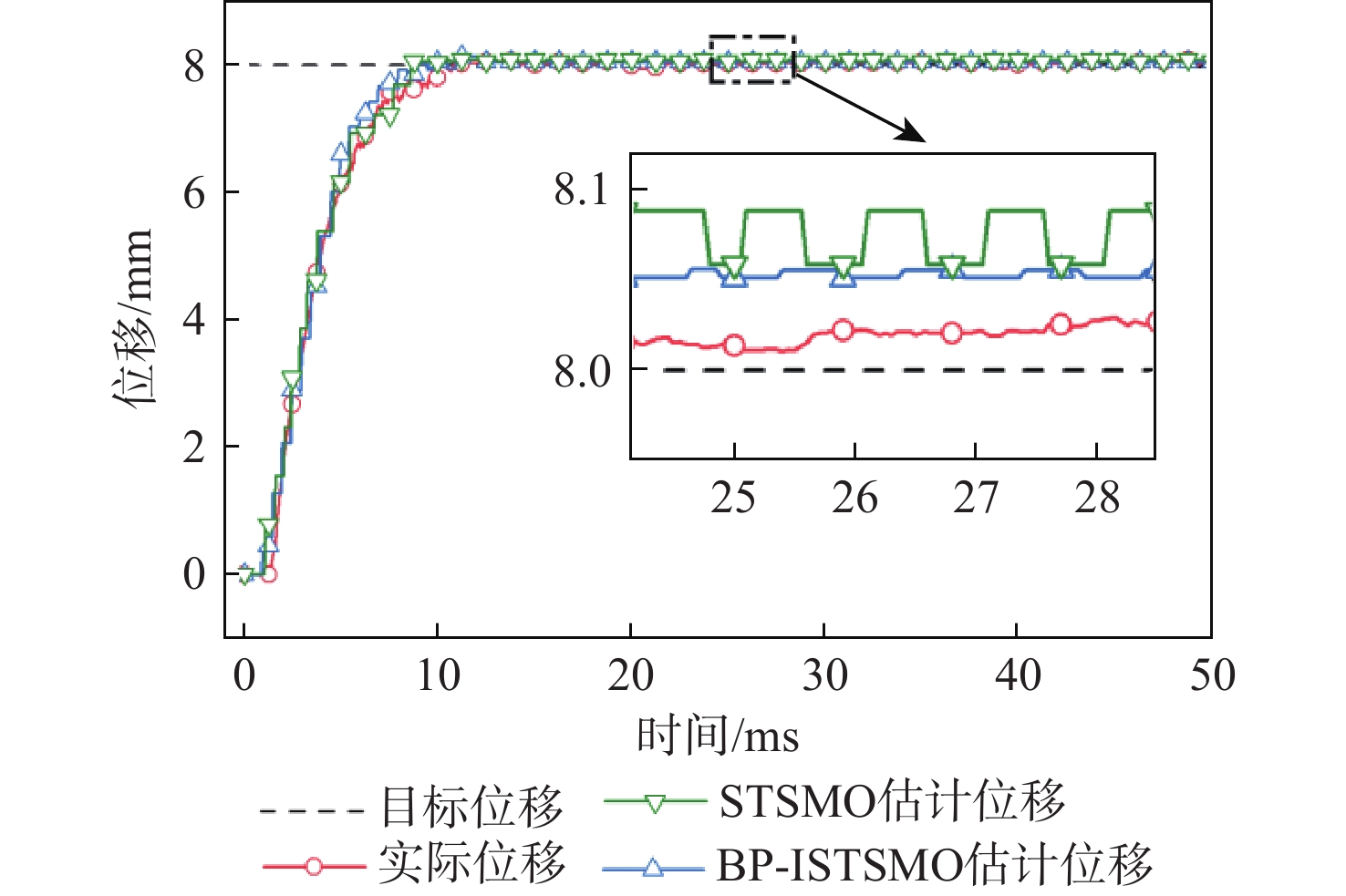
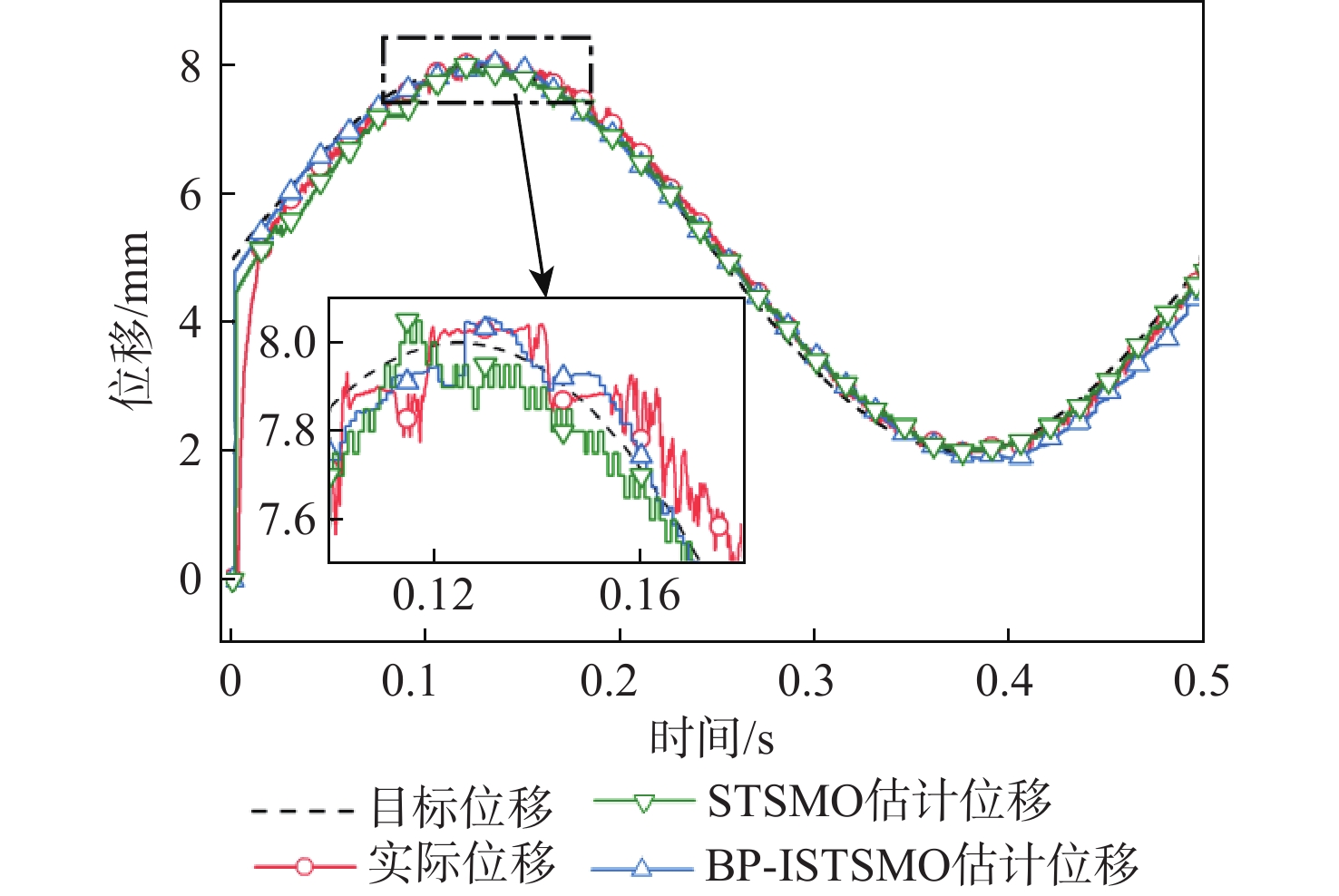
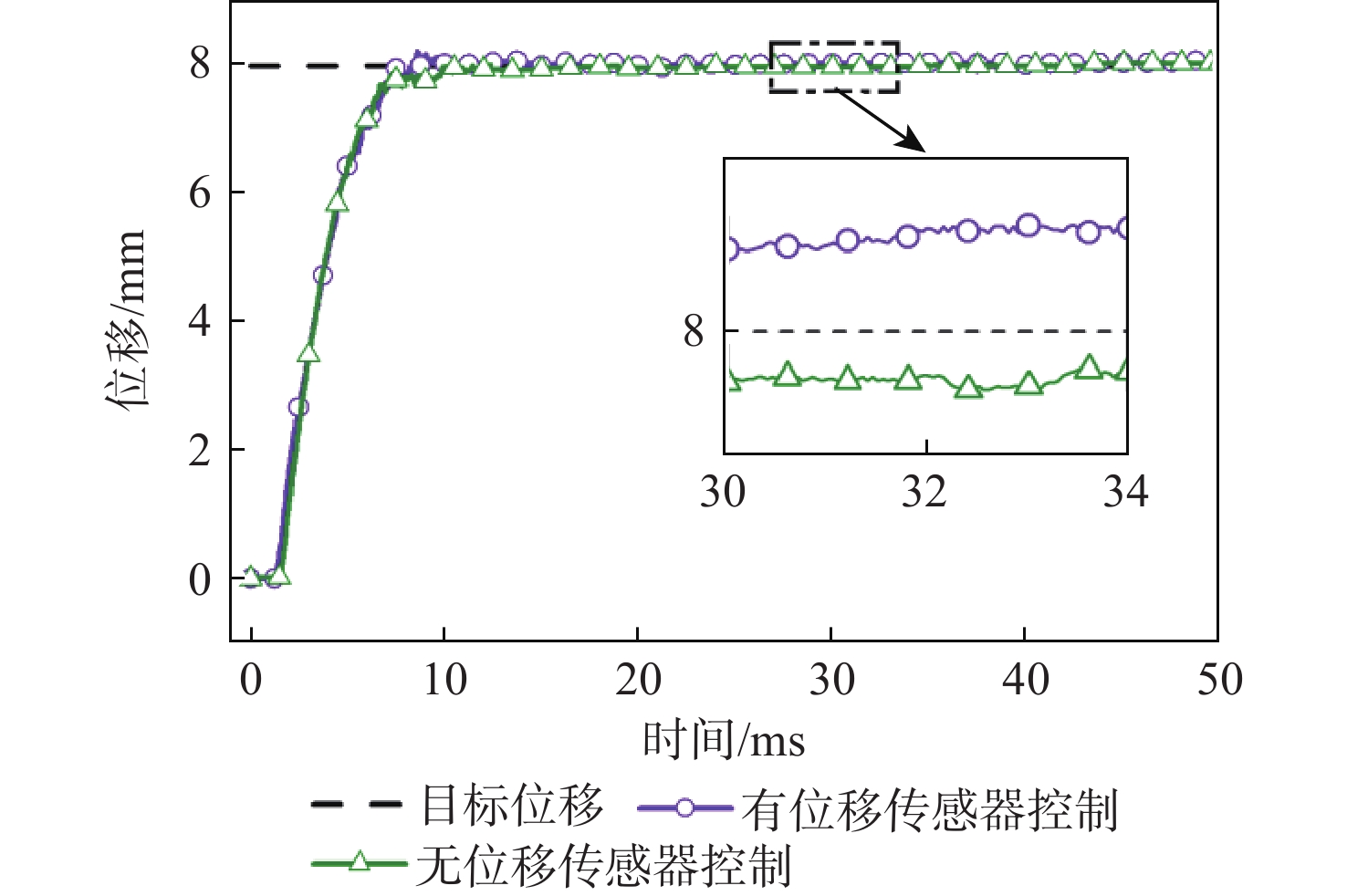
针对电磁直线执行器使用位移传感器带来的安装困难、成本增加和稳定性降低等问题,提出一种基于BP神经网络的改进超螺旋滑模观测器的位移估计方法,结合自适应积分鲁棒控制算法实现了电磁直线执行器无位移传感器控制。为削弱超螺旋滑模观测器的抖振现象,改善位移估计性能,在观测器结构方面,设计一种非奇异全局快速终端滑模面,并以连续的双曲正切函数作为切换函数;在观测器参数调整方面,设计BP神经网络,以动子速度为输入动态调整超螺旋滑模观测器增益。搭建电磁直线执行器运动控制性能测试平台,对位移估计与反馈控制结果进行分析,结果表明:相比于超螺旋滑模观测器,改进的滑模观测器在阶跃工况下的位移估计最大误差减小了16.22%,频率为2 Hz的正弦工况下的位移估计最大误差减小了9.10%;无位移传感器控制与有位移传感器控制的控制性能相当,两者在8 mm阶跃工况下的稳态误差约为0.03 mm,频率为2 Hz的正弦工况下,估计位移与实际位移的最大误差为0.43 mm。证明了基于改进超螺旋滑模观测器的电磁直线执行器无位移传感器控制的有效性与实用性。
Abstract:A displacement estimation technique based on BP neural networks is suggested to enhance the super-twisting sliding mode observer in order to address the installation challenges, cost rise, and stability reduction of electromagnetic linear actuators induced by the usage of displacement sensors. Combined with an adaptive integral robust control algorithm, the displacement sensorless control of the electromagnetic linear actuator is realized. A non-singular fast terminal sliding mode surface is designed with the continuous hyperbolic tangent function as the switching function in order to reduce the buffeting phenomenon and enhance the displacement estimation performance of the super-twisting sliding mode observer; in terms of the observer’s parameter adjustment, the BP neural network is designed to dynamically adjust the super-twisting sliding mode observer’s gain using the input of the mover speed. The motion control performance test platform of the electromagnetic linear actuator is established, and the displacement estimation and feedback control results are analyzed. The results show that the maximum displacement estimation error of the improved sliding mode observer is reduced by 16.22% under the step condition and 9.10% under the sine condition with the frequency of 2 Hz compared with the super-twisting sliding mode observer; the control performance of displacement sensorless control is equivalent to that of displacement sensor control. The steady state error of the two is 0.03 mm under the 8 mm step condition, and the maximum error is 0.43 mm under the sinusoidal condition with the frequency of 2 Hz. This proves the effectiveness and practicability of the displacement sensorless control of the electromagnetic linear actuator based on an improved super-twisting sliding mode observer.
-

图 2 超螺旋滑模观测器的位移观测原理
Figure 2. Displacement observation principle of super-twisting sliding mode observer
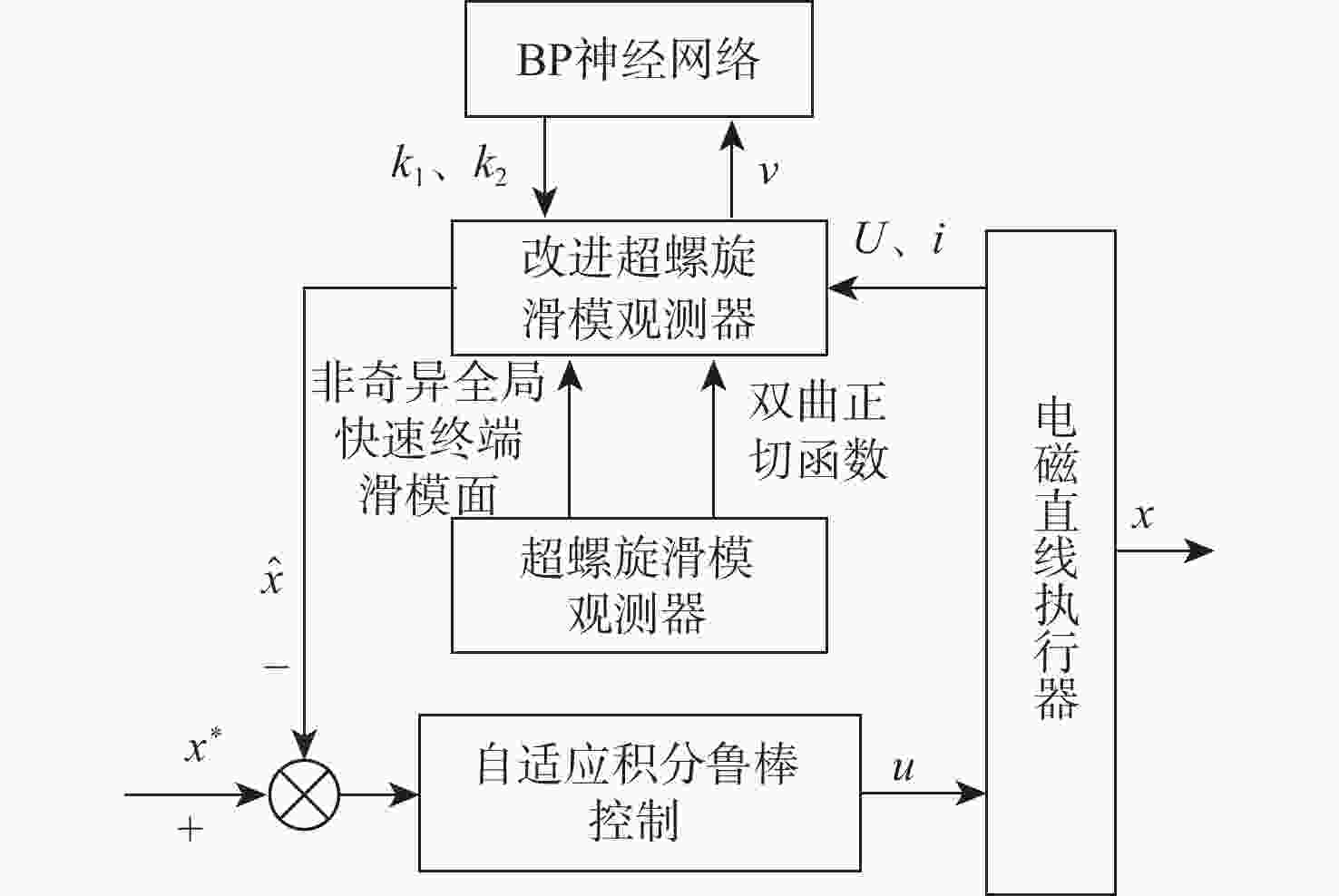
图 7 电磁直线执行器无位移传感器控制系统框图
Figure 7. Block diagram of electromagnetic linear actuator control system of displacement sensorless
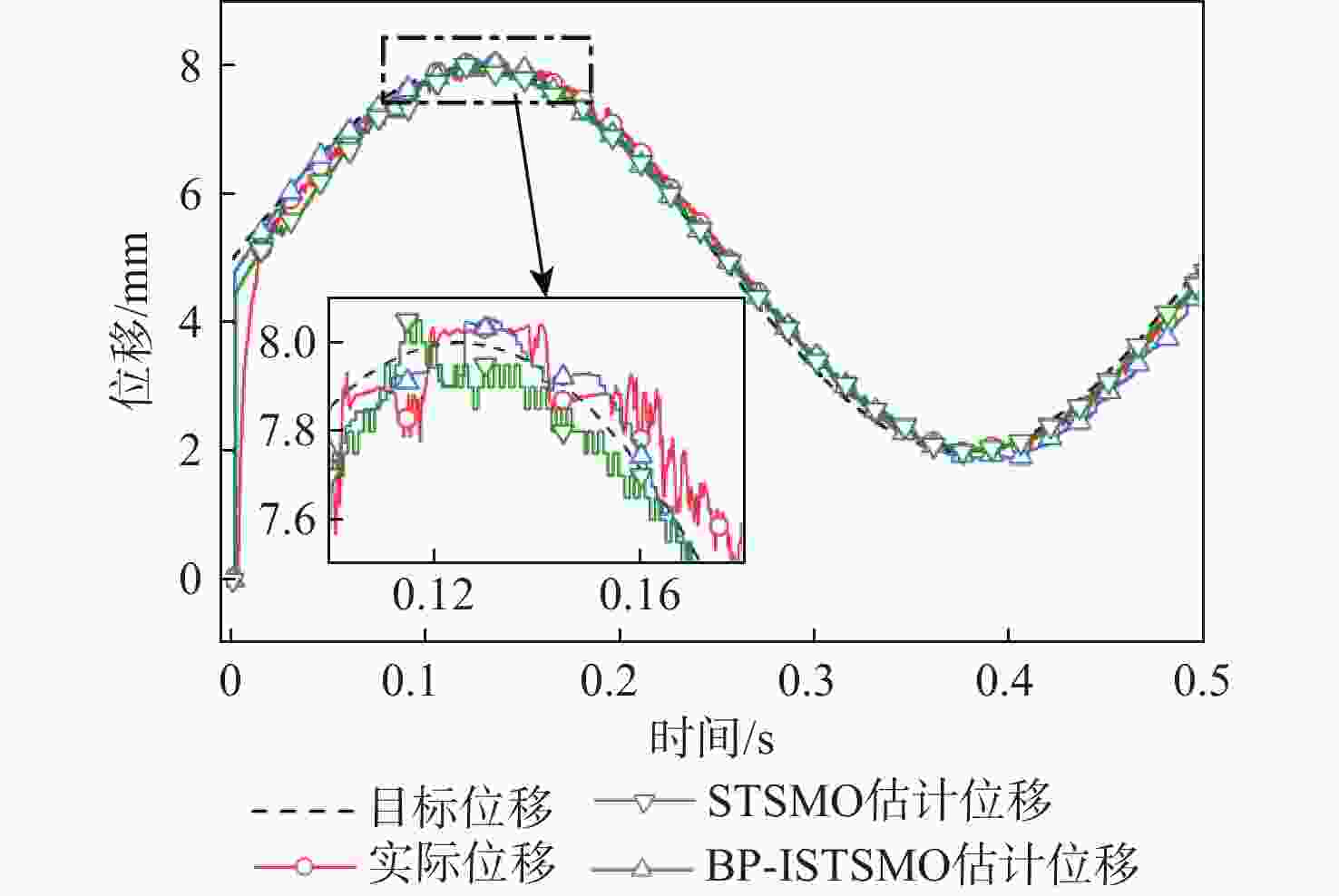
图 9 2 Hz正弦工况位移估计效果
Figure 9. Displacement estimation effect for 2 Hz sinusoidal condition
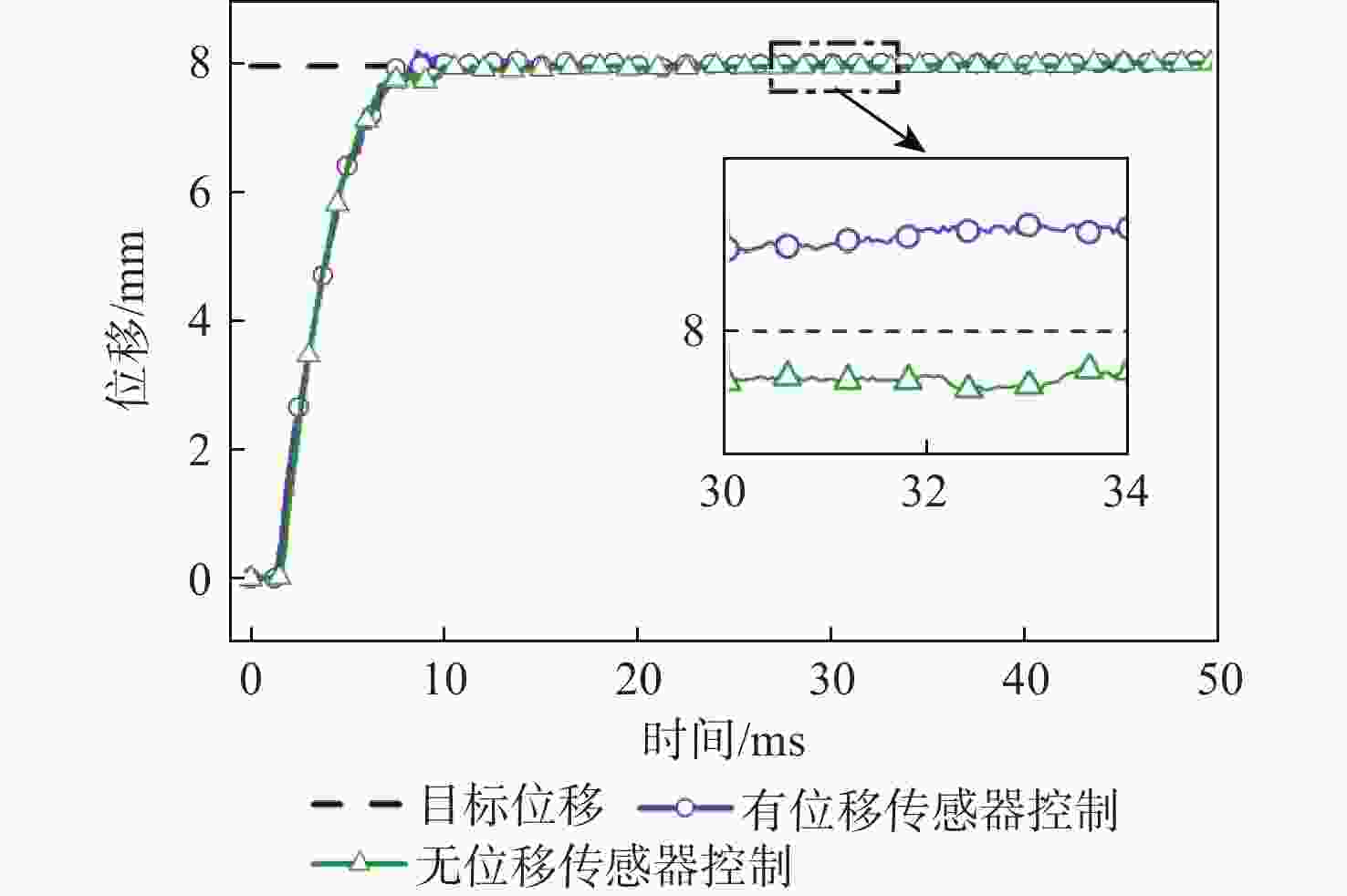
图 10 8 mm阶跃工况下无位移传感器控制效果
Figure 10. Control effect of displacement sensorless under 8 mm step condition
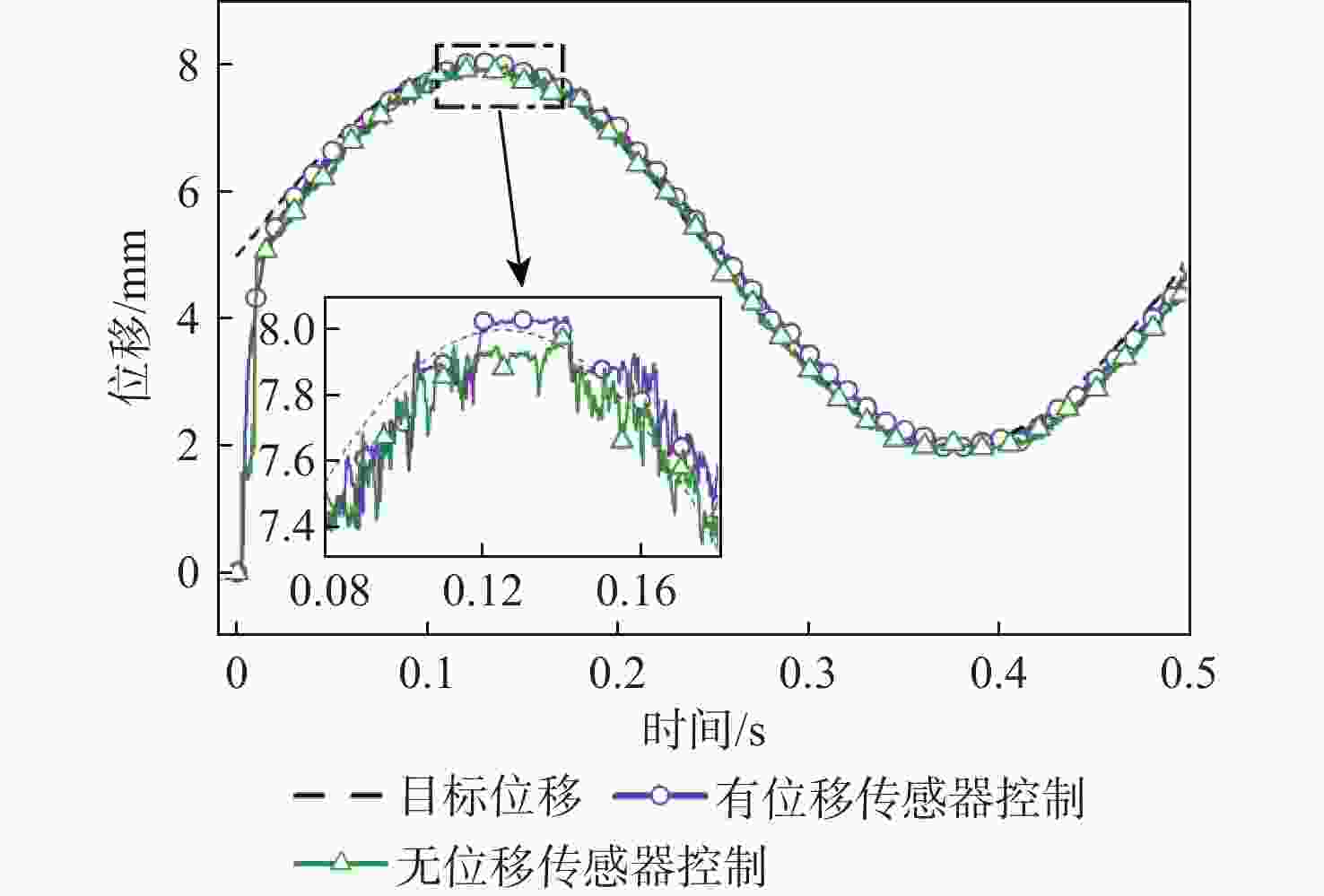
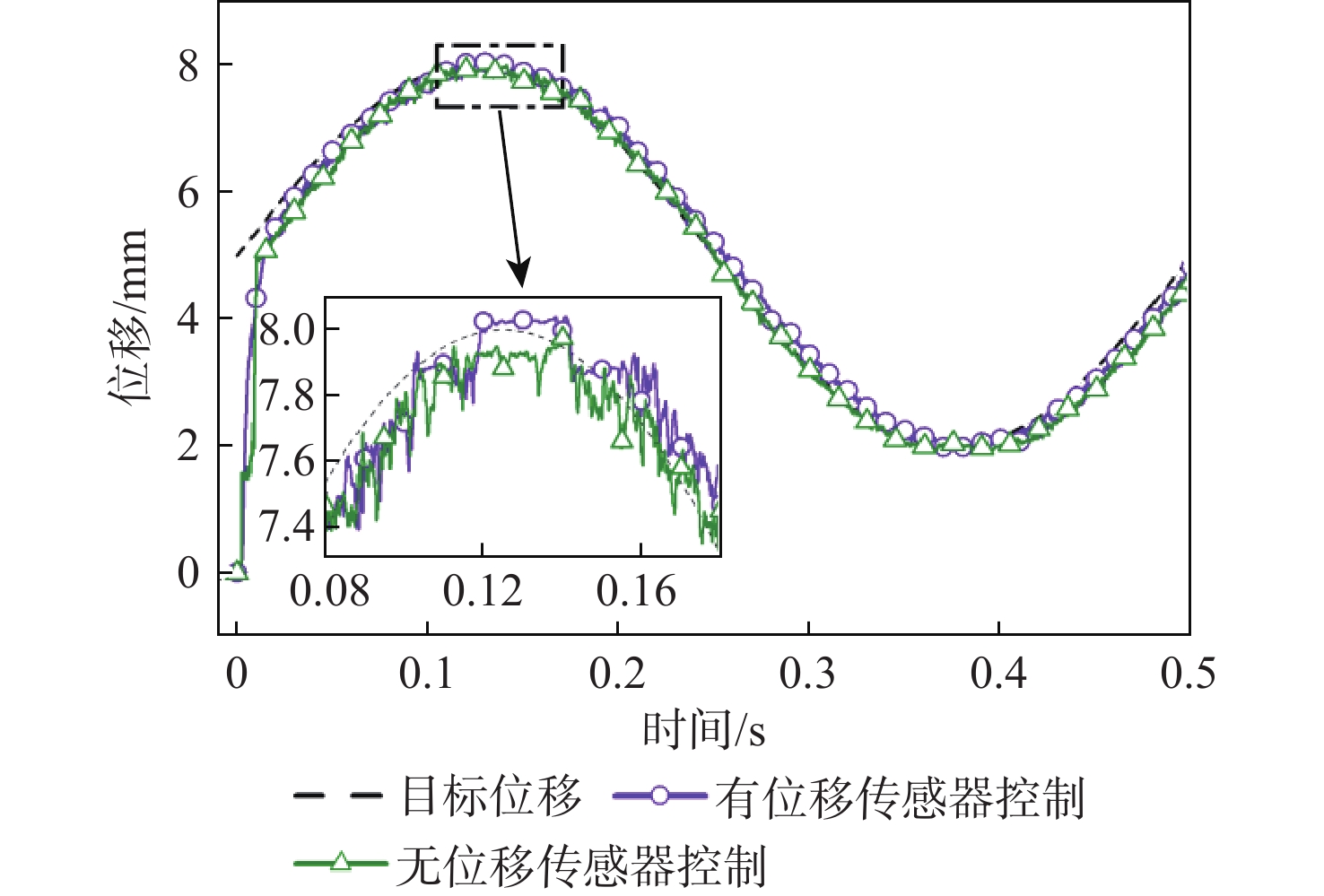
图 11 2 Hz正弦工况下无位移传感器控制效果
Figure 11. Control effect of displacement sensorless under 2 Hz sinusoidal condition
表 1 电磁直线执行器参数值
Table 1. Electromagnetic linear actuator parameter values
参数 数值 执行器工作行程/mm 10 动子质量/kg 0.13 线圈电感/mH 1.3 线圈电阻/Ω 1.1 电磁力常数/(N·A−1) 25.83  下载: 导出CSV
下载: 导出CSV
表 2 驱动器参数值
Table 2. Driver parameter values
参数 数值 工作电压/V 15~30 最大额定电流/A 100 外观尺寸/(mm×mm×mm) 70×56×18 导通电阻/Ω 0.003 开关频率/kHz 60
下载: 导出CSV
表 3 8 mm阶跃工况下2种观测器关键指标对比
Table 3. Comparison of key metrics of two observers under 8 mm step condition
观测器类型 准确度/% RMSE/10−4mm 最大误差/mm STSMO 98.35 3.43 0.37 BP-ISTSMO 99.21 2.98 0.31
下载: 导出CSV
表 4 不同阶跃工况下无位移传感器控制性能指标
Table 4. Performance indexes of displacement sensorless control under different step conditions
控制类型 目标位移/mm 稳态误差/mm 无位移传感器控制 3 0.02 5 0.03 8 0.03 有位移传感器控制 3 0.02 5 0.02 8 0.03
下载: 导出CSV
表 5 不同频率正弦工况下无位移传感器控制性能指标
Table 5. Performance indexes of displacement sensorless control under sinusoidal conditions with different frequencies
控制类型 频率/Hz RMSE/10−4 mm 最大误差/mm 无位移传感器控制 1 4.12 0.44 2 6.09 0.49 有位移传感器控制 1 3.89 0.42 2 5.67 0.46
下载: 导出CSV
-
[1] 谭草, 葛文庆, 李波, 等. 双稳态线性力执行器静动态特性[J]. 电机与控制学报, 2020, 24(6): 119-126.TAN C, GE W Q, LI B, et al. Static and dynamic characteristics of a bi-stable liner force actuator[J]. Electric Machines and Control, 2020, 24(6): 119-126(in Chinese). [2] 谭草, 李波, 于鹏, 等. 电磁直驱静液作动器多学科建模与优化[J]. 北京理工大学学报, 2022, 42(10): 1080-1088.TAN C, LI B, YU P, et al. Multidisciplinary modeling and optimization of direct-driving electro-hydrostatic actuator[J]. Transactions of Beijing Institute of Technology, 2022, 42(10): 1080-1088(in Chinese). [3] 李波, 江金昊, 葛文庆, 等. 融合磁势矢模型和等效面电流模型的电磁直线驱动装置解析建模方法[J]. 机械工程学报, 2024, 60(20): 261-270.LI B, JIANG J H, GE W Q, et al. Analytical modeling method of electromagnetic linear drive device combining magnetic potential vector model and equivalent surface current model[J]. Journal of Mechanical Engineering, 2024, 60(20): 261-270(in Chinese). [4] 沈艳霞, 罗昌茜. 基于超螺旋滑模观测器的永磁同步直线电机无模型控制[J]. 电力系统保护与控制, 2023, 51(18): 62-69.SHEN Y X, LUO C X. Model-free control of a permanent magnet linear synchronous motor based on a super-twisting sliding mode observer[J]. Power System Protection and Control, 2023, 51(18): 62-69(in Chinese). [5] 于杰, 李波, 葛文庆, 等. 基于LSSVM的电磁直线执行器位移估算研究[J]. 传感器与微系统, 2023, 42(6): 58-61.YU J, LI B, GE W Q, et al. Research on displacement estimation of electromagnetic linear actuator based on LSSVM[J]. Transducer and Microsystem Technologies, 2023, 42(6): 58-61(in Chinese). [6] 李强. 基于支持向量机的直线驱动装置位置预测方法研究[D]. 淄博: 山东理工大学, 2020.LI Q. Research on position prediction method of linear actuator based on support vector machine[D]. Zibo: Shandong University of Technology, 2020(in Chinese). [7] 谭草, 黎德祥, 葛文庆, 等. 改进LuGre模型的电磁直线执行器自适应鲁棒控制[J]. 电机与控制学报, 2022, 26(10): 130-138.TAN C, LI D X, GE W Q, et al. Adaptive robust control for electromagnetic linear actuator with improved LuGre model[J]. Electric Machines and Control, 2022, 26(10): 130-138(in Chinese). [8] 李玉娇. 电磁直线驱动装置无传感控制技术研究[D]. 淄博: 山东理工大学, 2019.LI Y J. Sensorless control technology study of electromagnetic linear driving device[D]. Zibo: Shandong University of Technology, 2019(in Chinese). [9] DÜLK I, KOVÁCSHÁZY T. Parameter estimation in linear electromagnetic devices[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3619-3628. [10] LIU K, YANG P, WANG R J, et al. Observer-based adaptive fuzzy finite-time attitude control for quadrotor UAVs[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 8637-8654. [11] 丰富, 胡海林, 钟德鸣, 等. 基于改进互联型全阶观测器的直线感应电机在线参数辨识[J]. 西南交通大学学报, 2024, 59(4): 776-785.FENG F, HU H L, ZHONG D M, et al. Online parameter identification of linear induction motors based on improved interconnected full-order observer[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 776-785(in Chinese). [12] MERCORELLI P. A two-stage augmented extended Kalman filter as an observer for sensorless valve control in camless internal combustion engines[J]. IEEE Transactions on Industrial Electronics, 2012, 59(11): 4236-4247. [13] KHODARAHMI M, MAIHAMI V. A review on Kalman filter models[J]. Archives of Computational Methods in Engineering, 2023, 30(1): 727-747. [14] 杨洋, 苏伟. 基于改进滑模观测器的四旋翼无人机轨迹控制[J]. 电光与控制, 2024, 31(7): 20-26.YANG Y, SU W. Trajectory control of quadrotor UAVs based on improved sliding mode observer[J]. Electronics Optics & Control, 2024, 31(7): 20-26(in Chinese). [15] 张会林, 王国强, 杨海马. 神经网络优化二阶滑模观测器的PMSM无感控制[J]. 控制工程, 2022, 29(11): 2075-2081.ZHANG H L, WANG G Q, YANG H M. Sensorless control of PMSM based on second-order sliding mode observer optimized by neural network[J]. Control Engineering of China, 2022, 29(11): 2075-2081(in Chinese). [16] WU Y C, FENG J W. Development and application of artificial neural network[J]. Wireless Personal Communications, 2018, 102(2): 1645-1656. [17] 谭草, 鲁应涛, 葛文庆, 等. 直驱式永磁直线电机深度模糊滑模-自抗扰控制[J]. 西安交通大学学报, 2023, 57(1): 185-194.TAN C, LU Y T, GE W Q, et al. Depth fuzzy sliding-mode active disturbance rejection control method of permanent magnet linear motor for direct drive system[J]. Journal of Xi’an Jiaotong University, 2023, 57(1): 185-194(in Chinese). [18] WLAS M, KRZEMINSKI Z, GUZINSKI J, et al. Artificial-neural-network-based sensorless nonlinear control of induction motors[J]. IEEE Transactions on Energy Conversion, 2005, 20(3): 520-528. [19] 谭草, 于鹏, 李波, 等. 直驱泵阀协同式线控制动单元压力串级控制[J]. 北京航空航天大学学报, 2025, 51(4): 1163-1171.TAN C, YU P, LI B, et al. Pressure cascade control of brake-by-wire unit based on direct drive pump-valve cooperative[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(4): 1163-1171(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 344
- HTML全文浏览量: 250
- PDF下载量: 7
- 被引次数: 0
