



-
摘要:
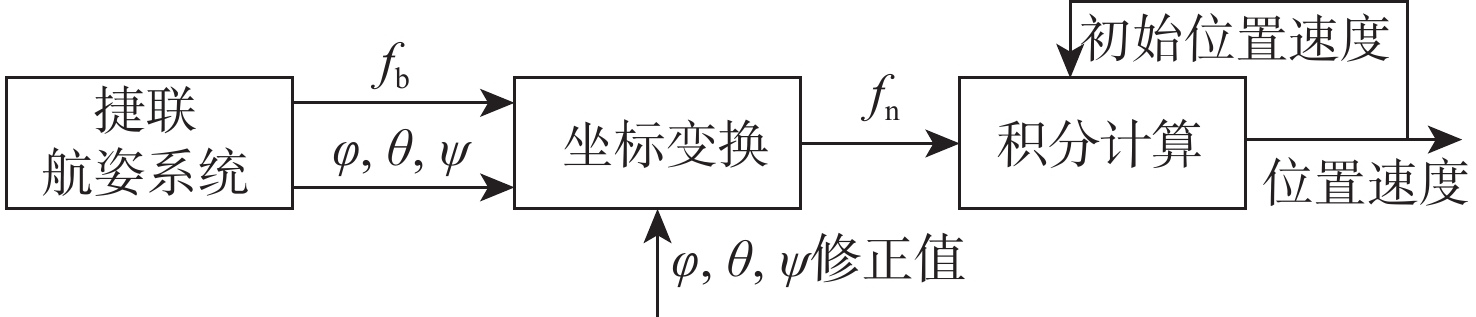
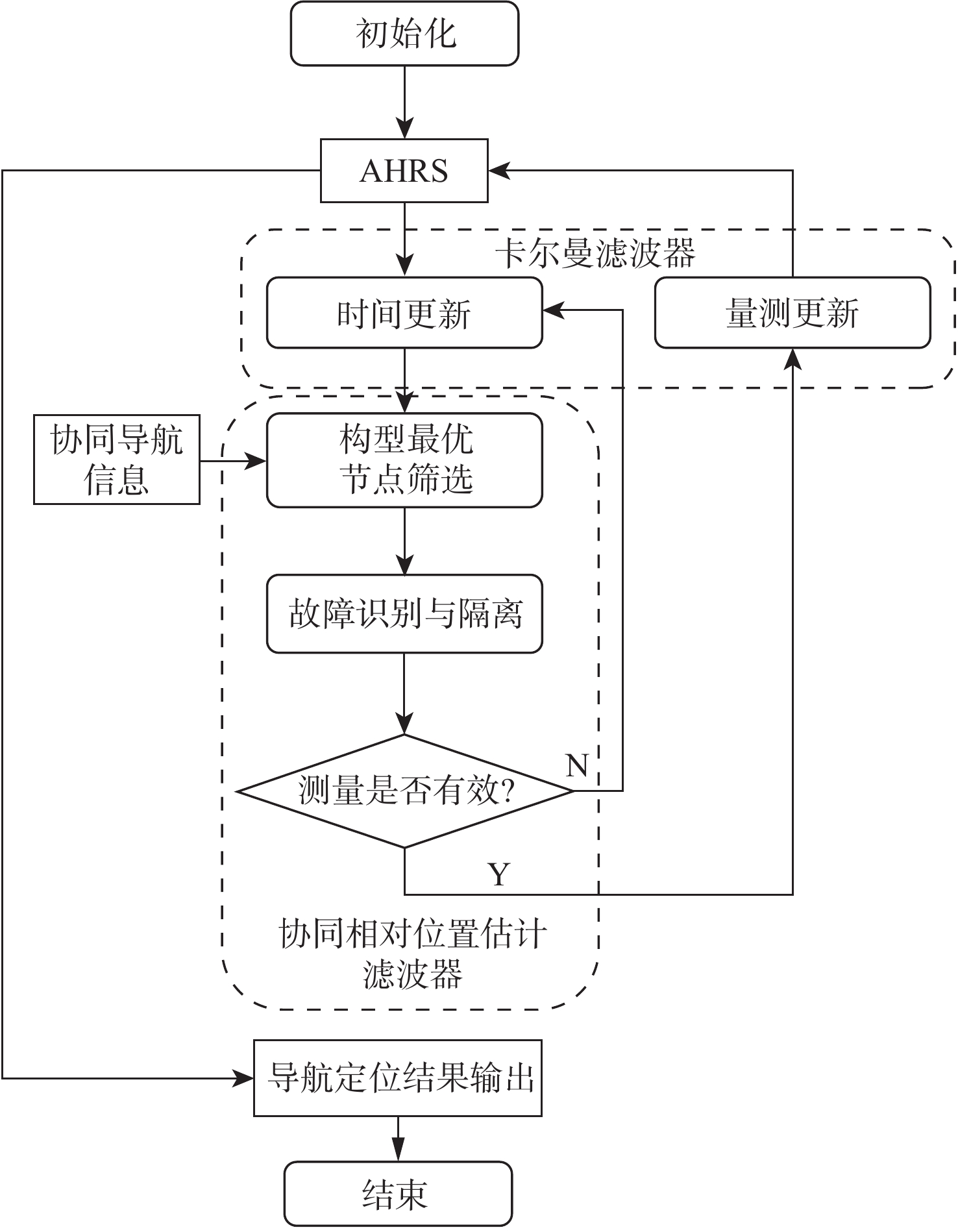
为有效解决无人机集群在卫星部分拒止下的低成本导航定位问题,提出一种基于航姿参考系统(AHRS)的无人机集群协同导航方法。以AHRS作为基础完成三维位置状态递推模型设计;设计一种基于机间测距的分布式协同导航滤波器,利用构建的协同精度因子(CDOP)完成最优节点筛选,降低导航系统的计算负担;通过故障识别与隔离算法完成对受扰协同量测信息的诊断与系统重构;利用分布式协同导航算法完成位置解算。仿真与实验表明:协同导航方法能有效解决集群过度依赖卫星导航、大规模导航信息处理慢等难题,相较于传统多源融合算法有效降低了系统硬件成本,符合大规模无人机集群低成本下的高精度定位需求。
Abstract:In order to effectively solve the problem of low-cost navigation and localization of UAV swarm under the satellite partial denial environment, a cooperative navigation method for UAV swarm based on the attitude heading reference system (AHRS) is proposed. Firstly, the design of the 3D position estimation model is completed using the AHRS as the basis. Secondly, the cooperative dilution of precision (CDOP) is used to finish the optimal node selection in a distributed cooperative navigation filter based on inter-aircraft range, which lessens the navigation system's computational load. Algorithms for fault identification and isolation are then used to diagnose the disrupted cooperative measurement data and reconfigure the system. Finally, the solution of the absolute position is accomplished using the distributed cooperative navigation algorithm. Simulation and experiments demonstrate that this algorithm effectively resolves problems such as excessive reliance on satellite navigation and slow processing of large-scale navigation data. Compared with traditional multi-source fusion algorithms, this approach significantly reduces hardware costs while meeting high-precision positioning requirements for a large-scale UAV swarm at a lower cost.
-
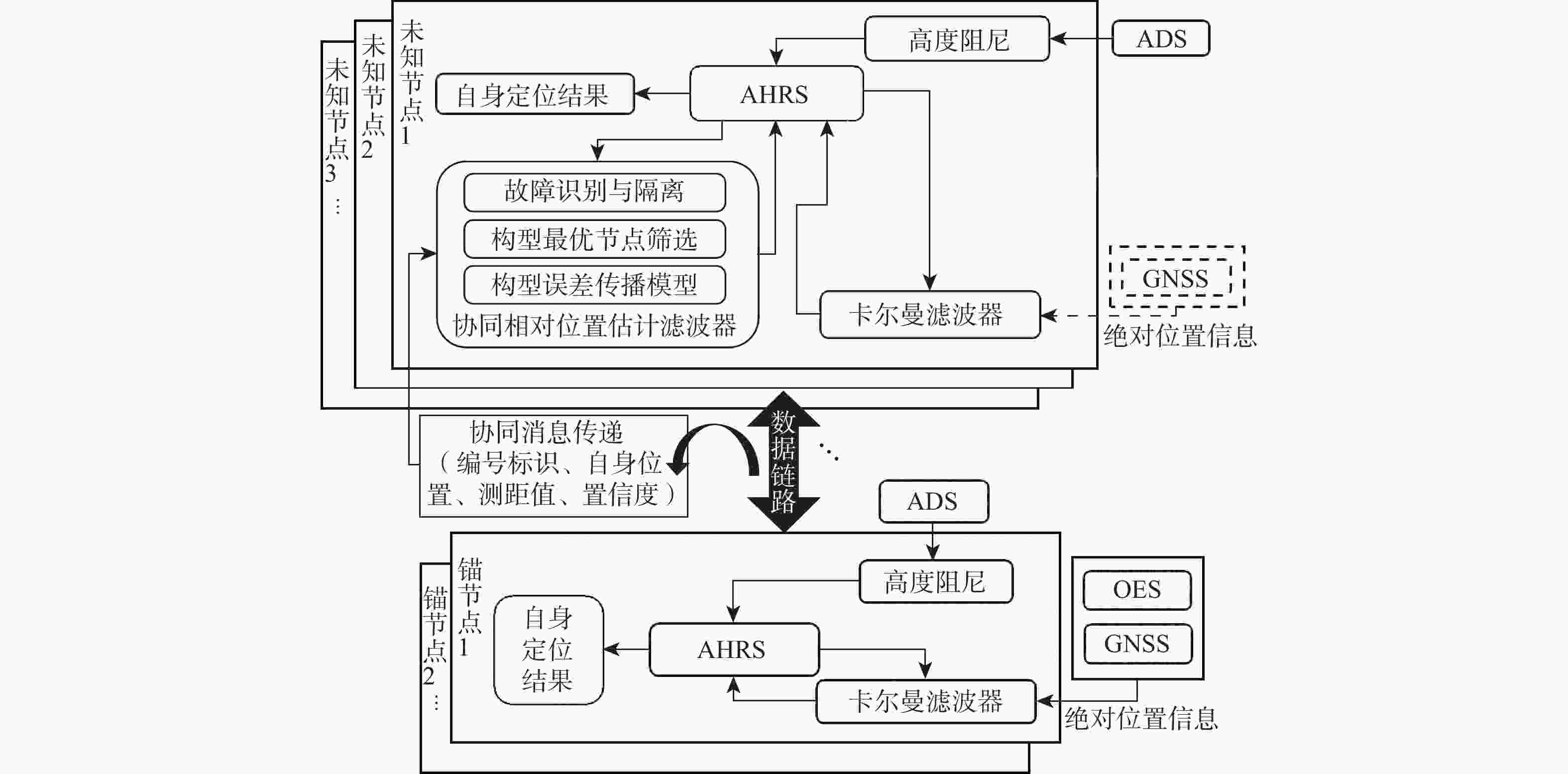
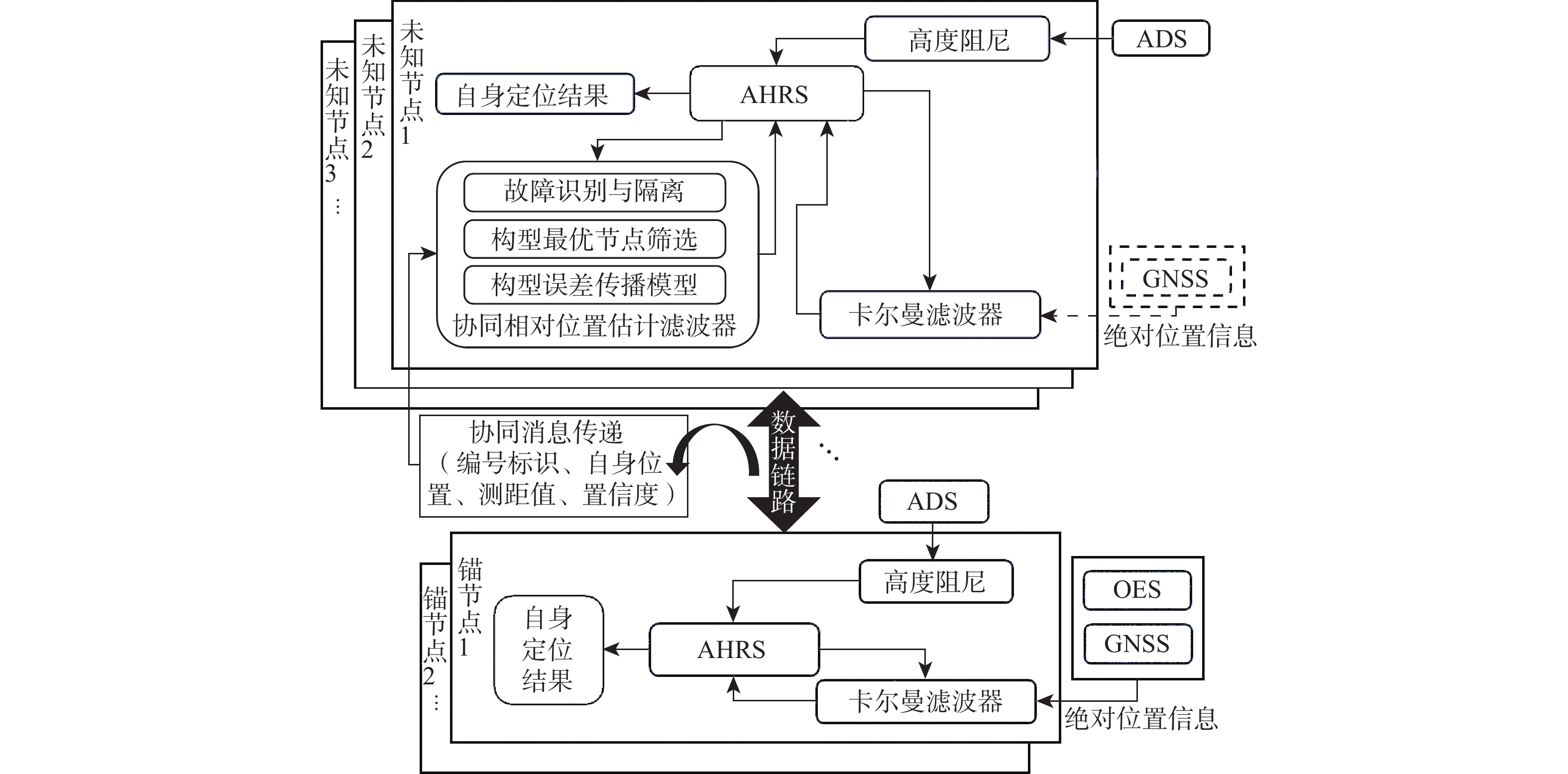
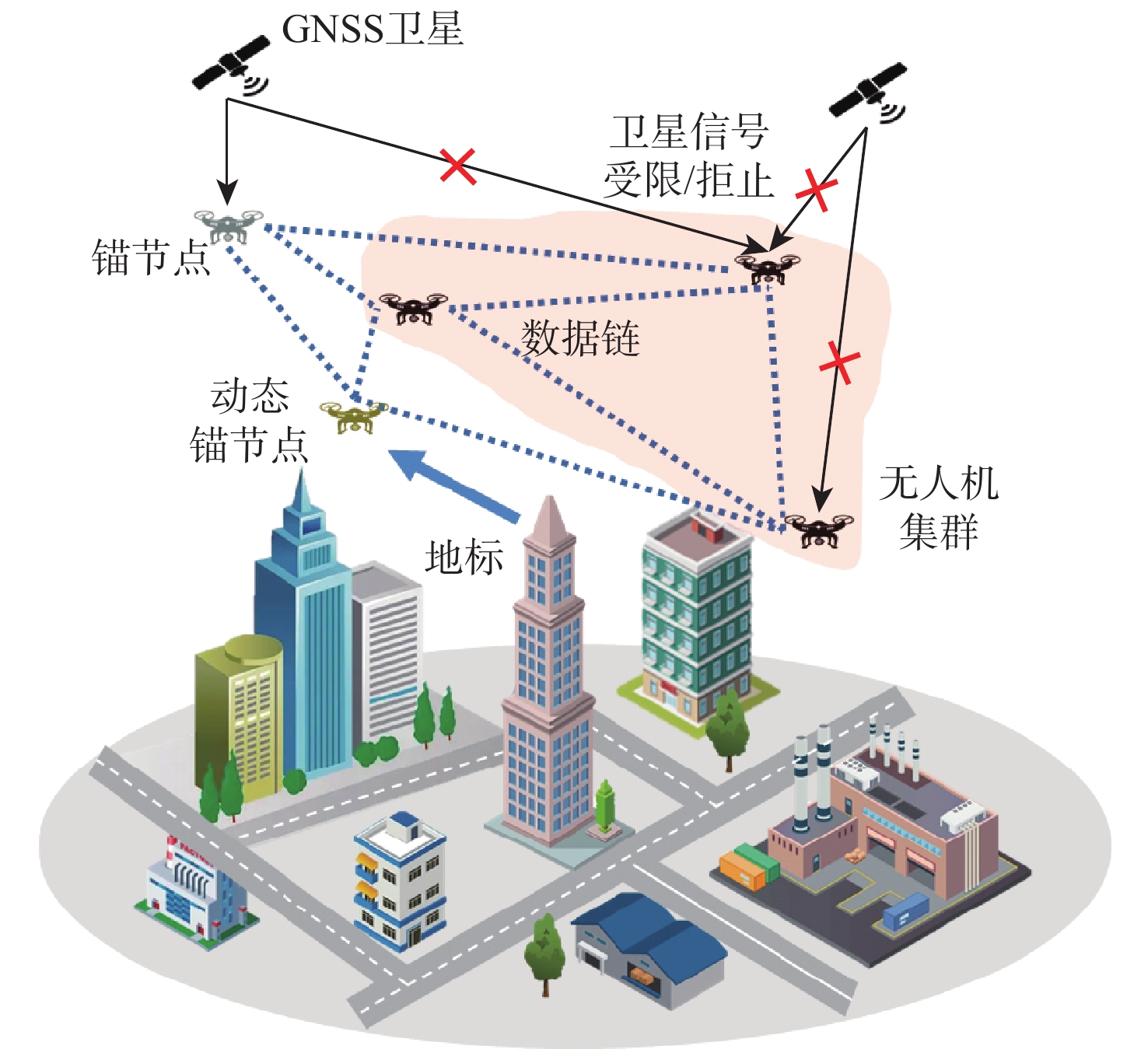
图 2 基于AHRS的协同导航原理示意图
Figure 2. Schematic diagram of AHRS-based cooperative navigation principle
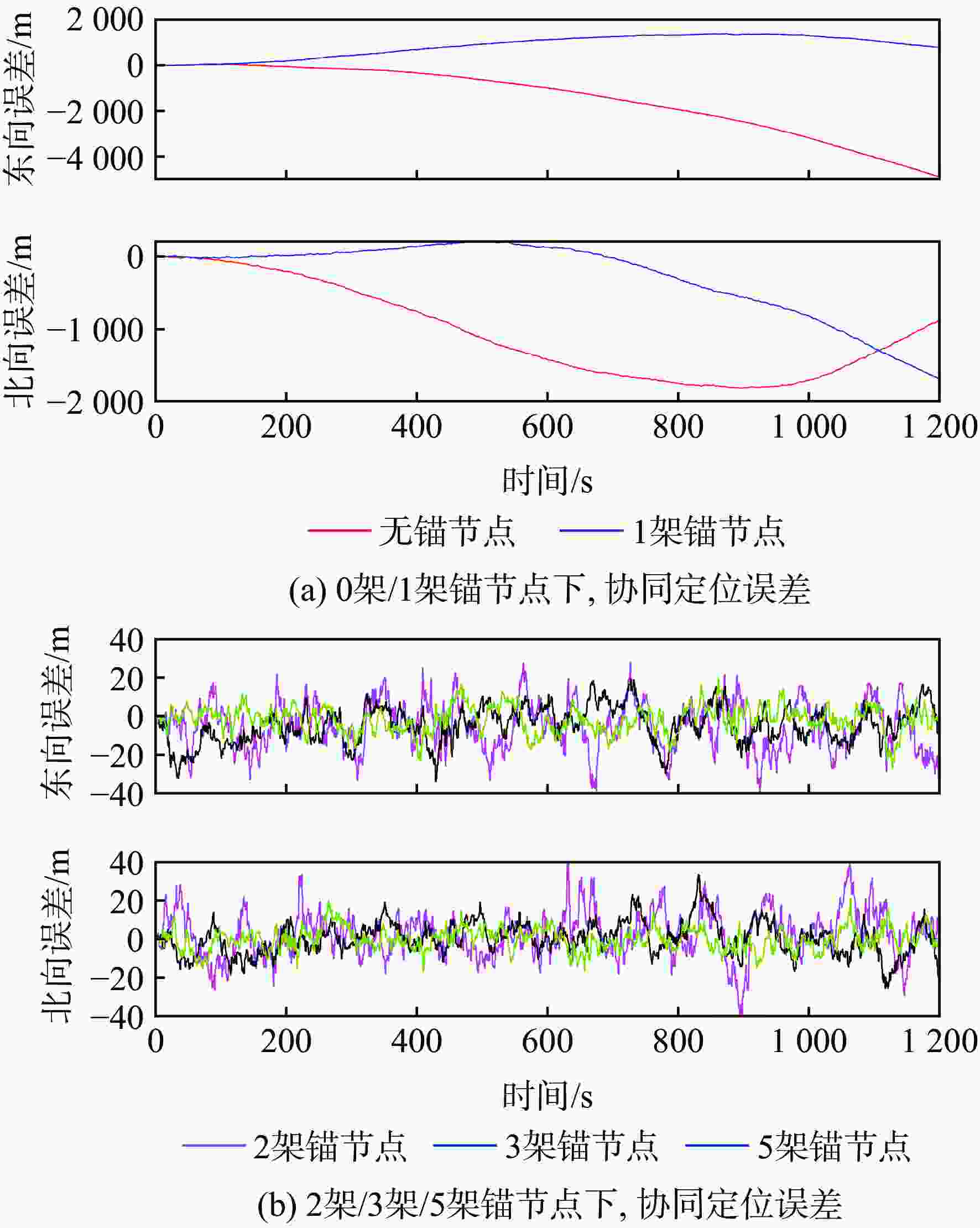
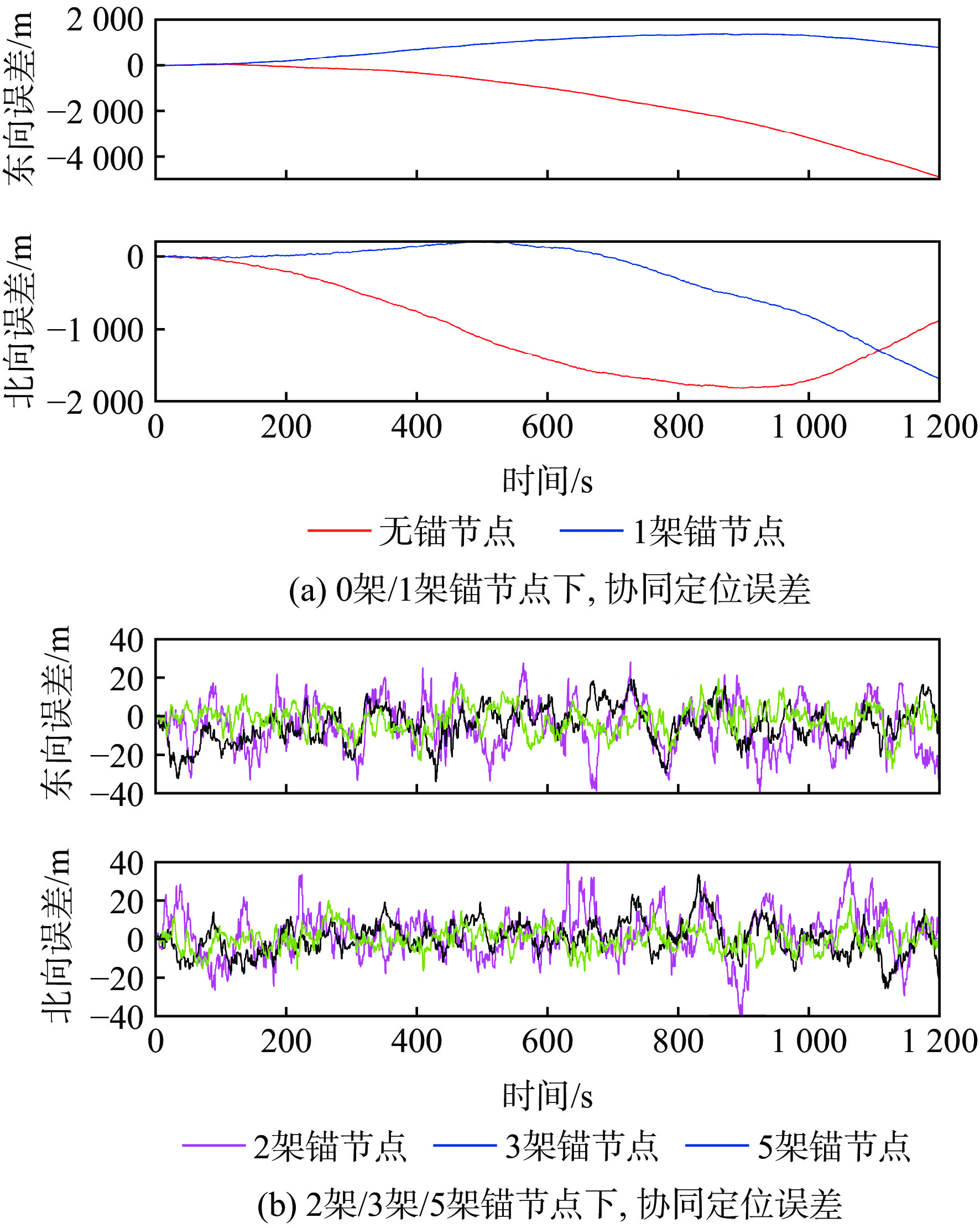
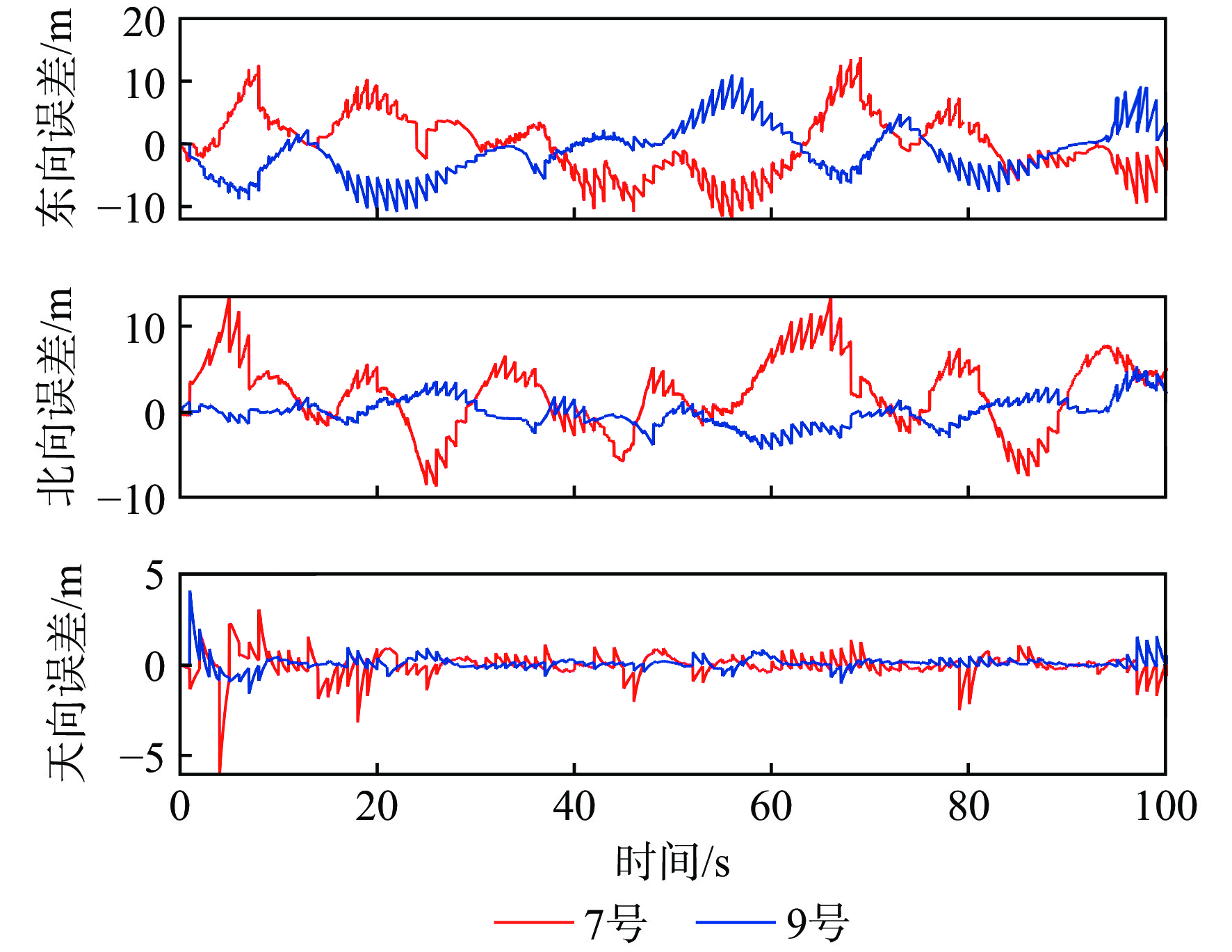
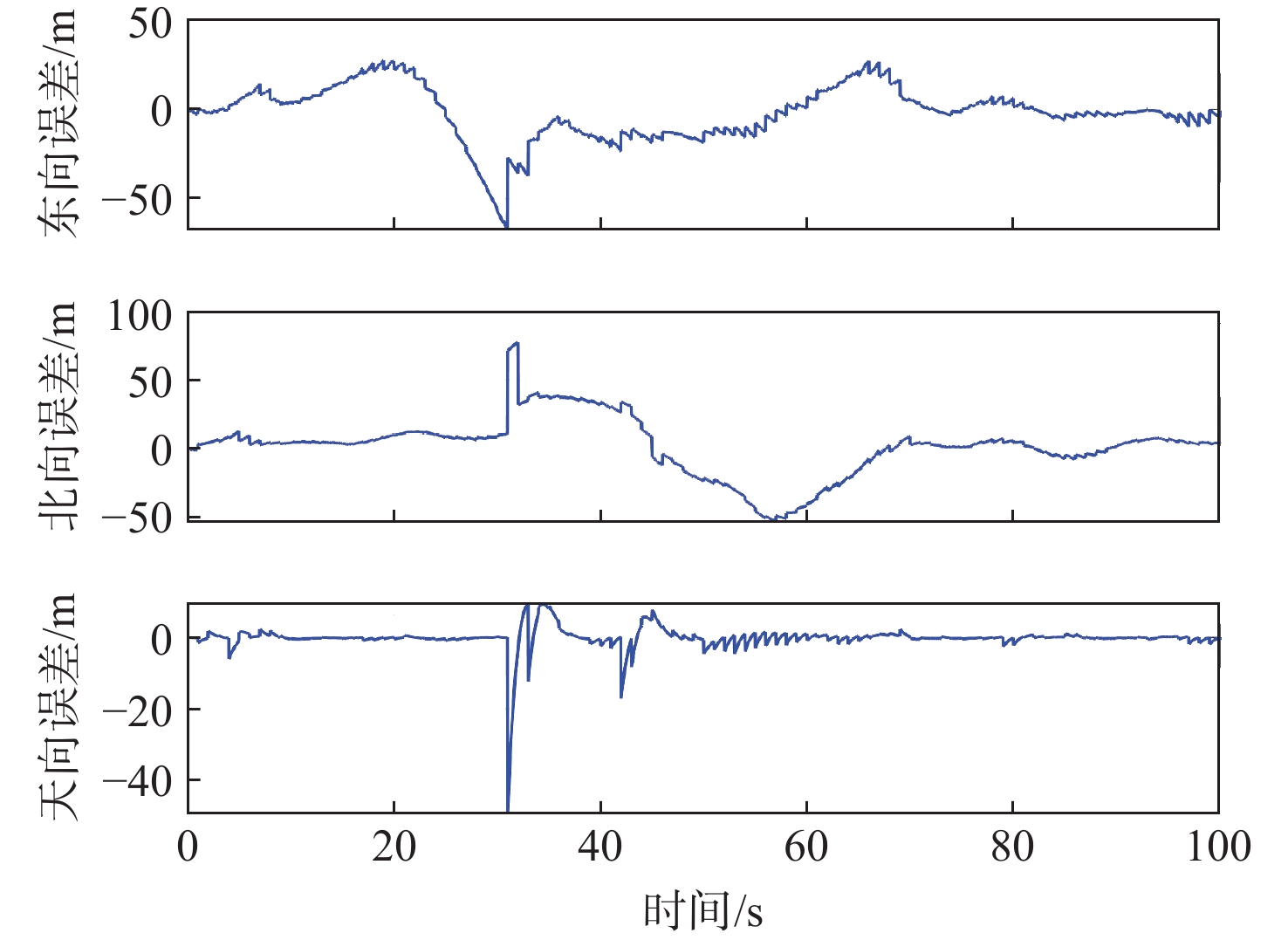
图 7 不同锚节点数量下定位误差曲线
Figure 7. Positioning error curves for different number of anchor nodes
表 1 仿真传感器性能配置
Table 1. Simulated sensor performance configuration
参数 数值 AHRS航姿漂移误差/(°) (0.2,0.2,0.3) AHRS航姿相关时间/s 60 AHRS加速度计偏置误差/(m·s−2) 0.00038 gAHRS加速度计相关时间/s 3600 GNSS位置误差/m 5 GNSS速度误差/(m·s−1) 0.2 OES测距误差/m 3 OES测角误差/(°) 0.01 大气传感器高度白噪声/m 10 数据链路测距误差/m 10  下载: 导出CSV
下载: 导出CSV
表 2 定位均方根误差统计结果
Table 2. Statistics of position root mean square error
锚节点数量 定位RMSE绝对误差/m 定位RMSE相对误差/% 0 2871.5 265.7 1 1049.5 53.8 2 21.3 23.6 3 18.7 19.8 5 15.5 17.9
下载: 导出CSV
表 3 未知节点定位均方根误差
Table 3. Root mean square error of unknown node localisation
节点编号 融合机制 定位RMSE/m 经度 纬度 高度 6 所有互连节点 10.1 9.4 7.3 3个最优节点 13.8 10.9 7.9 11 所有互连节点 11.5 9.8 7.6 3个最优节点 13.4 11.2 8.0
下载: 导出CSV
-
[1] 陈清阳, 辛宏博, 王玉杰, 等. 一种多机协同打击的快速航迹规划方法[J]. 北京航空航天大学学报, 2022, 48(7): 1145-1153.CHEN Q Y, XIN H B, WANG Y J, et al. A rapid path planning method for multiple UAVs to cooperative strike[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1145-1153(in Chinese). [2] ZHOU Z Y, ZHANG C T, XU C, et al. Energy-efficient industrial Internet of UAVs for power line inspection in smart grid[J]. IEEE Transactions on Industrial Informatics, 2018, 14(6): 2705-2714. doi: 10.1109/TII.2018.2794320 [3] 张鹏飞, 何印, 马振华, 等. 无人机集群协同控制技术综述[J]. 兵器装备工程学报, 2024, 45(4): 1-9.ZHANG P F, HE Y, MA Z H, et al. Review on cooperative control technology of UAV swarm[J]. Journal of Ordnance Equipment Engineering, 2024, 45(4): 1-9(in Chinese). [4] TEUNISSEN P J G, KHODABANDEH A. Review and principles of PPP-RTK methods[J]. Journal of Geodesy, 2015, 89(3): 217-240. doi: 10.1007/s00190-014-0771-3 [5] GENG J, TEFERLE F N, MENG X, et al. Towards PPP-RTK: ambiguity resolution in real-time precise point positioning[J]. Advances in Space Research, 2011, 47(10): 1664-1673. doi: 10.1016/j.asr.2010.03.030 [6] ZHANG G H, XU P H, XU H S, et al. Prediction on the urban GNSS measurement uncertainty based on deep learning networks with long short-term memory[J]. IEEE Sensors Journal, 2021, 21(18): 20563-20577. doi: 10.1109/JSEN.2021.3098006 [7] ZHU N, MARAIS J, BÉTAILLE D, et al. GNSS position integrity in urban environments: a review of literature[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9): 2762-2778. doi: 10.1109/TITS.2017.2766768 [8] DALLA TORRE A, CAPORALI A. An analysis of intersystem biases for multi-GNSS positioning[J]. GPS Solutions, 2015, 19(2): 297-307. doi: 10.1007/s10291-014-0388-2 [9] YASUDA Y D V, MARTINS L E G, CAPPABIANCO F A M. Autonomous visual navigation for mobile robots[J]. ACM Computing Surveys, 2021, 53(1): 1-34. [10] HAI J, HAO Y T, ZOU F Z, et al. A visual navigation system for UAV under diverse illumination conditions[J]. Applied Artificial Intelligence, 2021, 35(15): 1529-1549. doi: 10.1080/08839514.2021.1985799 [11] WANG W Q. Overview of frequency diverse array in radar and navigation applications[J]. IET Radar, Sonar & Navigation, 2016, 10(6): 1001-1012. [12] GUAN R P, RISTIC B, WANG L P, et al. Feature-based robot navigation using a Doppler-azimuth radar[J]. International Journal of Control, 2017, 90(4): 888-900. doi: 10.1080/00207179.2016.1244727 [13] 赵春晖, 周昳慧, 林钊, 等. 无人机景象匹配视觉导航技术综述[J]. 中国科学: 信息科学, 2019, 49(5): 507-519. doi: 10.1360/N112018-00316ZHAO C H, ZHOU Y H, LIN Z, et al. Review of scene matching visual navigation for unmanned aerial vehicles[J]. Scientia Sinica (Informations), 2019, 49(5): 507-519(in Chinese). doi: 10.1360/N112018-00316 [14] JIN Z L, WANG X Z, MORAN B, et al. Multi-region scene matching based localisation for autonomous vision navigation of UAVs[J]. Journal of Navigation, 2016, 69(6): 1215-1233. doi: 10.1017/S0373463316000187 [15] GYAGENDA N, HATILIMA J V, ROTH H, et al. A review of GNSS-independent UAV navigation techniques[J]. Robotics and Autonomous Systems, 2022, 152: 104069. doi: 10.1016/j.robot.2022.104069 [16] AZZAM R, BOIKO I, ZWEIRI Y. Swarm cooperative navigation using centralized training and decentralized execution[J]. Drones, 2023, 7(3): 193. doi: 10.3390/drones7030193 [17] 周泽波, 张泽亮, 彭鑫, 等. 基于记忆融合模式的多无人机分散式协同导航方法[J]. 航空学报, 2023, 44(20): 628440.ZHOU Z B, ZHANG Z L, PENG X, et al. Multi-UAV decentralized cooperative navigation method based on memory-fusion[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628440(in Chinese). [18] YANG C Z, STRADER J, GU Y, et al. Cooperative navigation using pairwise communication with ranging and magnetic anomaly measurements[J]. Journal of Aerospace Information Systems, 2020, 17(11): 624-633. doi: 10.2514/1.I010785 [19] 熊骏, 熊智, 于永军, 等. 超宽带测距辅助的无人机近距离相对导航方法[J]. 中国惯性技术学报, 2018, 26(3): 346-351.XIONG J, XIONG Z, YU Y J, et al. Close relative navigation algorithm for unmanned aerial vehicle aided by UWB relative measurement[J]. Journal of Chinese Inertial Technology, 2018, 26(3): 346-351(in Chinese). [20] GROSS J N, GU Y, RHUDY M B. Robust UAV relative navigation with DGPS, INS, and peer-to-peer radio ranging[J]. IEEE Transactions on Automation Science and Engineering, 2015, 12(3): 935-944. doi: 10.1109/TASE.2014.2383357 [21] 屈耀红, 张峰, 谷任能, 等. 基于距离测量的多无人机协同目标定位方法[J]. 西北工业大学学报, 2019, 37(2): 266-272. doi: 10.1051/jnwpu/20193720266QU Y H, ZHANG F, GU R N, et al. Target cooperative location method of multi-UAV based on pseudo range measurement[J]. Journal of Northwestern Polytechnical University, 2019, 37(2): 266-272(in Chinese). doi: 10.1051/jnwpu/20193720266 [22] 魏帅迎, 杜雨桐, 胡博, 等. GNSS拒止环境下UAV集群协同导航技术发展现状及分析[J]. 导航与控制, 2023, 22(4): 5-16.WEI S Y, DU Y T, HU B, et al. Development status and analysis of UAV swarm cooperative navigation technology in GNSS-denied environment[J]. Navigation and Control, 2023, 22(4): 5-16(in Chinese). [23] HUANG Y L, ZHANG Y G, XU B, et al. A new adaptive extended Kalman filter for cooperative localization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(1): 353-368. doi: 10.1109/TAES.2017.2756763 [24] SHALABY M, SHOKAIR M, MESSIHA N W. RSS cooperative localization in WSNs operating in the millimeter bands[J]. Wireless Personal Communications, 2020, 115(3): 2327-2334. doi: 10.1007/s11277-020-07683-7 [25] WYMEERSCH H, LIEN J, WIN M Z. Cooperative localization in wireless networks[J]. Proceedings of the IEEE, 2009, 97(2): 427-450. doi: 10.1109/JPROC.2008.2008853 [26] TANG J J, LI P J. Airborne integrated navigation system based on SINS/GPS/TAN/EOAN[J]. Mathematical Problems in Engineering, 2020, 2020(1): 3218942. [27] CHAN Y T, TSUI W Y, SO H C, et al. Time-of-arrival based localization under NLOS conditions[J]. IEEE Transactions on Vehicular Technology, 2006, 55(1): 17-24. doi: 10.1109/TVT.2005.861207 [28] SHI C F, XIONG Z, CHEN M X, et al. Cooperative navigation of unmanned aerial vehicle formation with delayed measurement[J]. Measurement Science and Technology, 2024, 35(6): 066302. doi: 10.1088/1361-6501/ad2741 [29] HU J Y, NIU H L, CARRASCO J, et al. Fault-tolerant cooperative navigation of networked UAV swarms for forest fire monitoring[J]. Aerospace Science and Technology, 2022, 123: 107494. doi: 10.1016/j.ast.2022.107494 [30] MCHUGH M L. The Chi-square test of independence[J]. Biochemia Medica, 2013, 23(2): 143-149. [31] ZHANG P F, MA Z H, HE Y, et al. Cooperative positioning method of a multi-UAV based on an adaptive fault-tolerant federated filter[J]. Sensors, 2023, 23(21): 8823. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 385
- HTML全文浏览量: 102
- PDF下载量: 22
- 被引次数: 0
