



-
摘要:
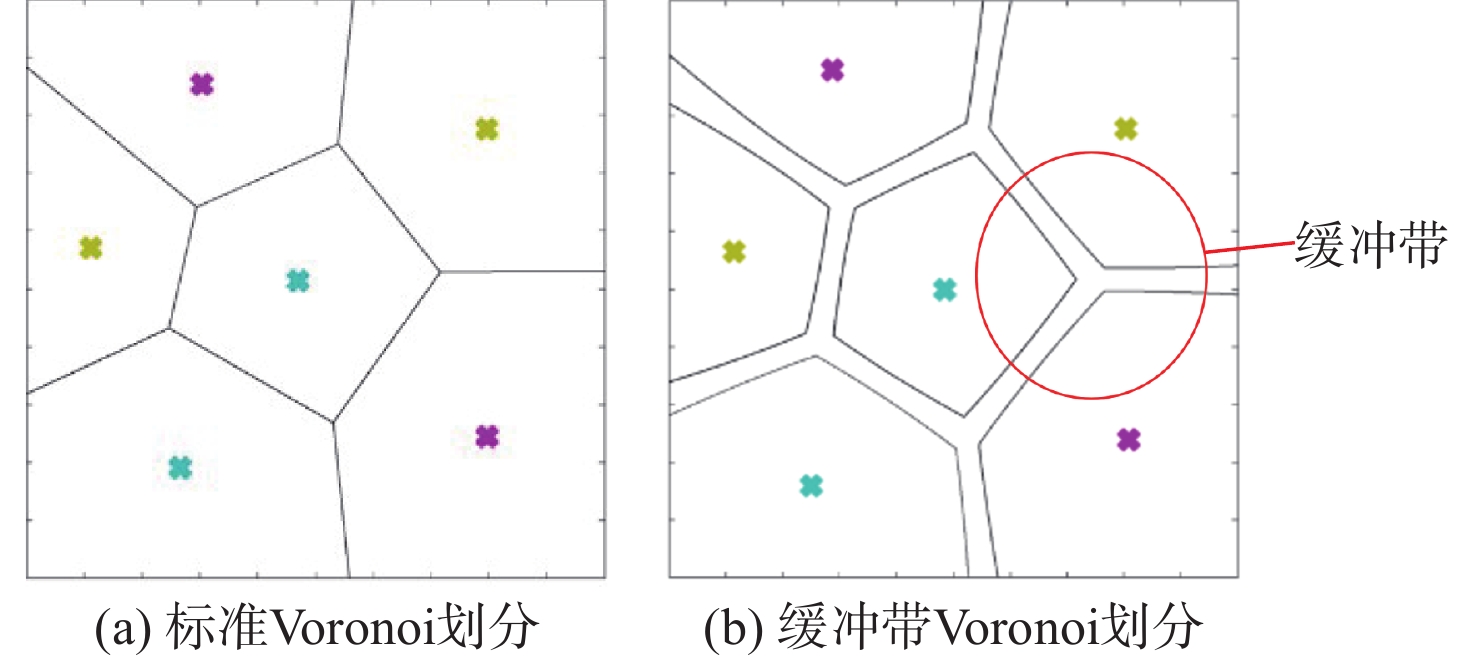
针对未知环境下的多机器人协同搜索和源定位问题,提出一种基于Voronoi图的分布式协同区域搜索和覆盖方法。该方法考虑机器人的实际尺寸和定位误差引起的碰撞问题,根据每个机器人的定位不确定性半径构造Voronoi缓冲区域以保障安全性。利用稀疏高斯过程回归和引入不确定正则项的质心Voronoi划分(CVT)算法重建未知浓度场的分布,并进行协同覆盖;提出一种自适应环境探索策略,实现无先验信息下的环境探索。仿真实验表明:所提方法能够快速完成对未知环境的探索,并准确定位到污染源的位置。
Abstract:For the problem of multi-robot collaborative search and source localization in unknown environments, a distributed collaborative search and coverage method based on Voronoi diagrams is proposed. In order to assure safety, this method initially addresses collision problems caused by the physical dimensions and positioning faults of the robots by building Voronoi buffer zones based on each robot’s placement uncertainty radius. Utilizing sparse Gaussian process regression and the centroidal Voronoi tessellation (CVT) algorithm with an uncertainty regularization term, the distribution of the unknown concentration field is reconstructed to achieve collaborative coverage. An adaptive environmental exploration strategy is proposed to enable environment exploration without prior information. Simulation experiments demonstrate that this method can rapidly complete exploration of unknown environments and accurately locate the position of the pollution source.
-
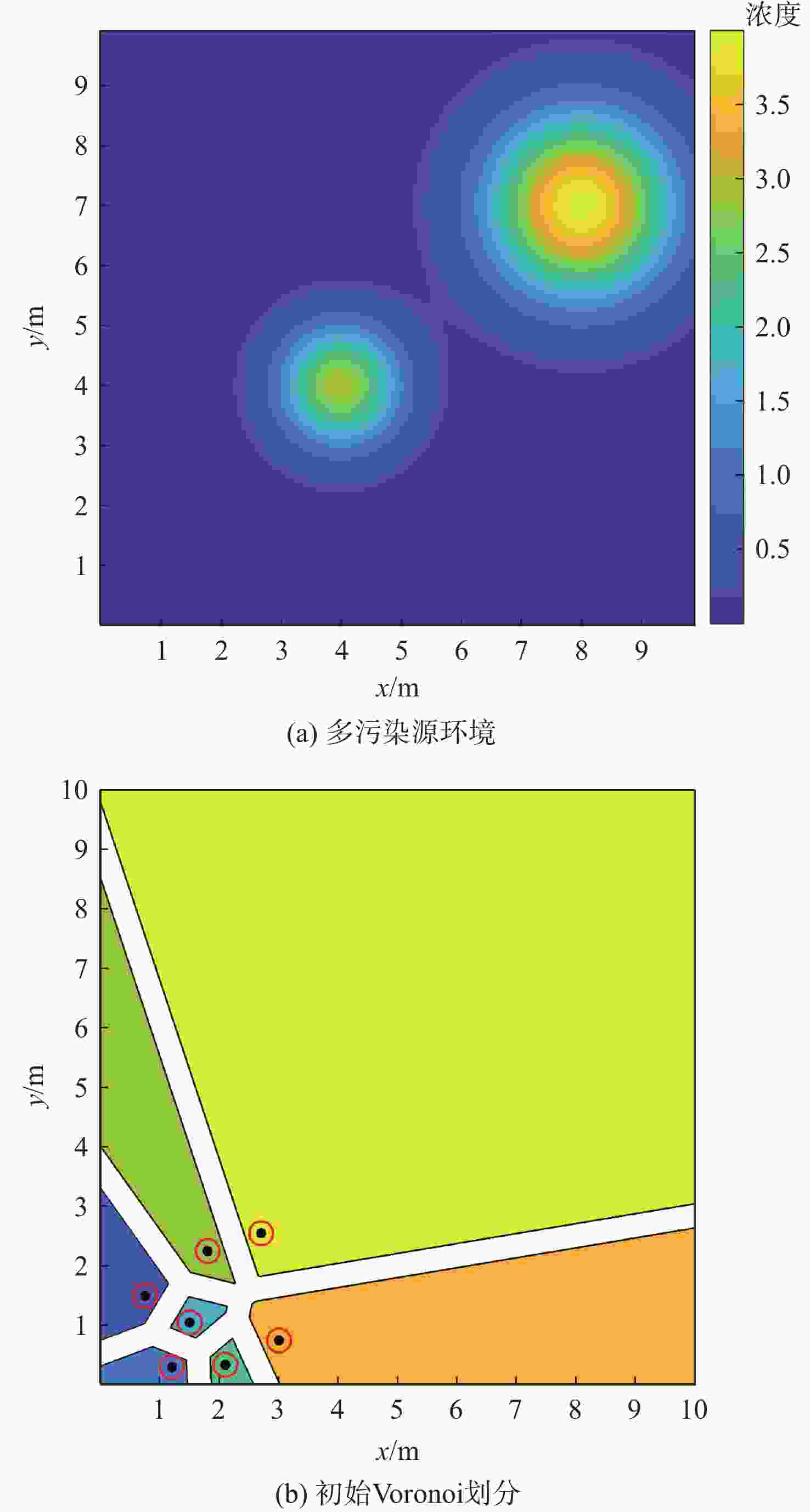
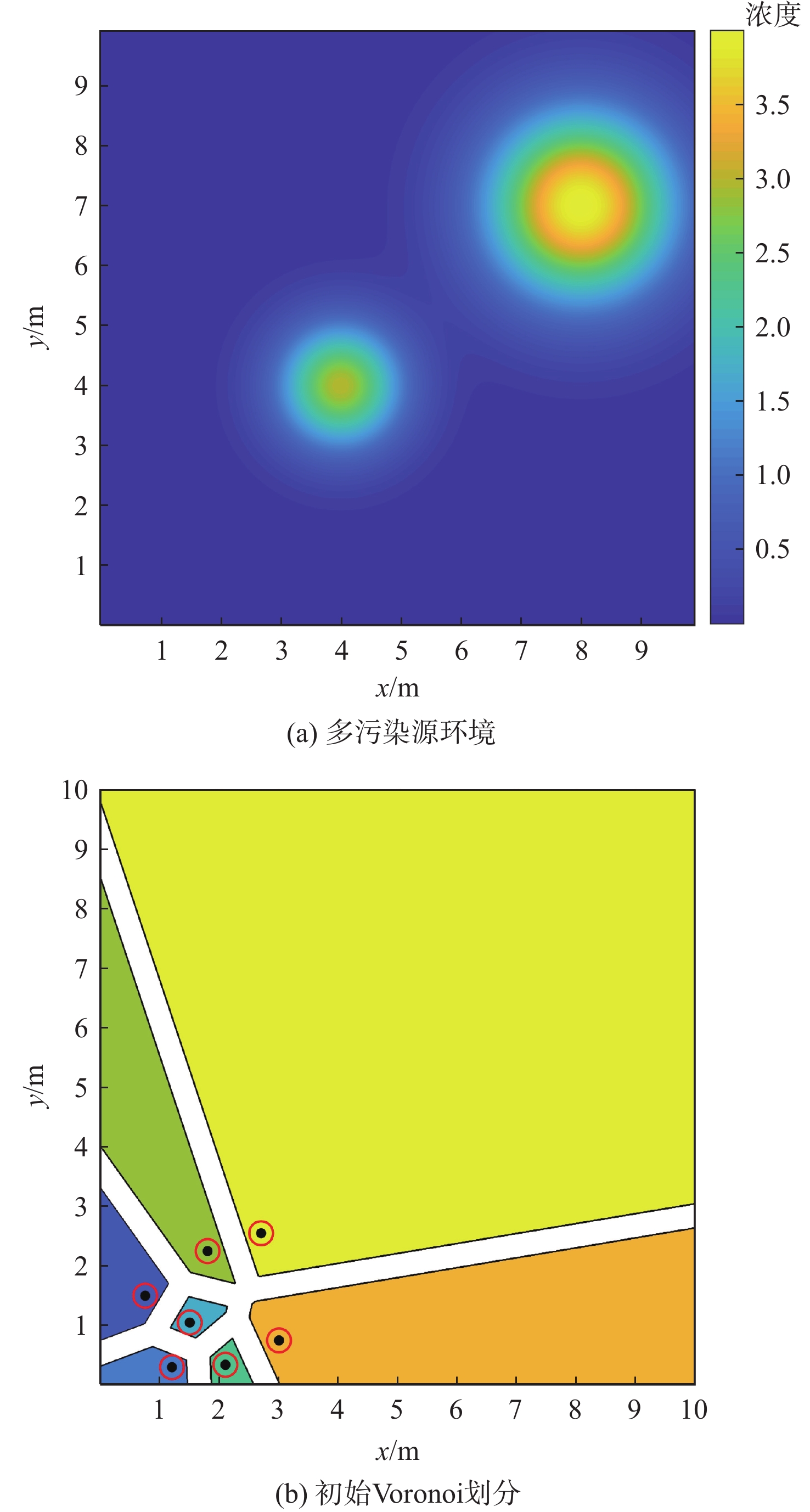
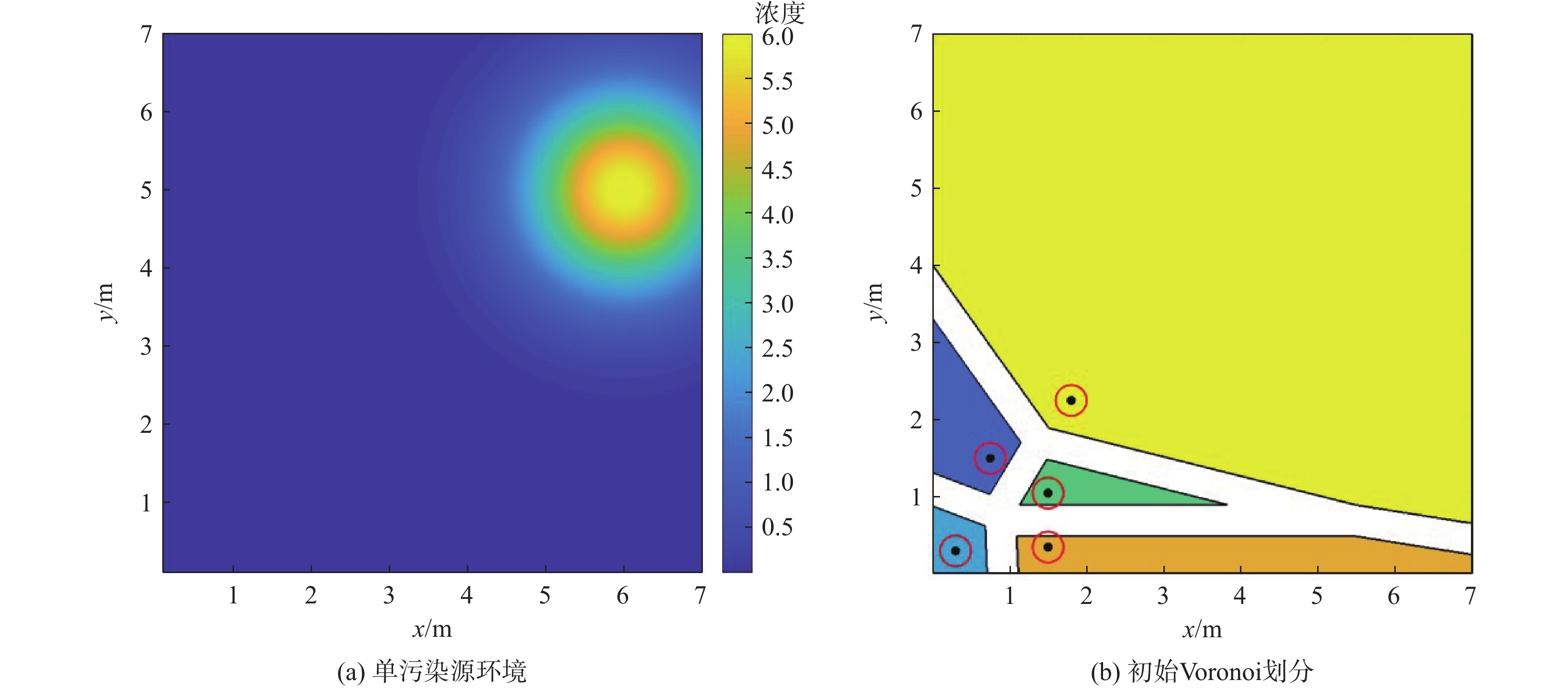
图 5 多污染源仿真初始环境
Figure 5. Initial environment for simulating multiple pollution sources
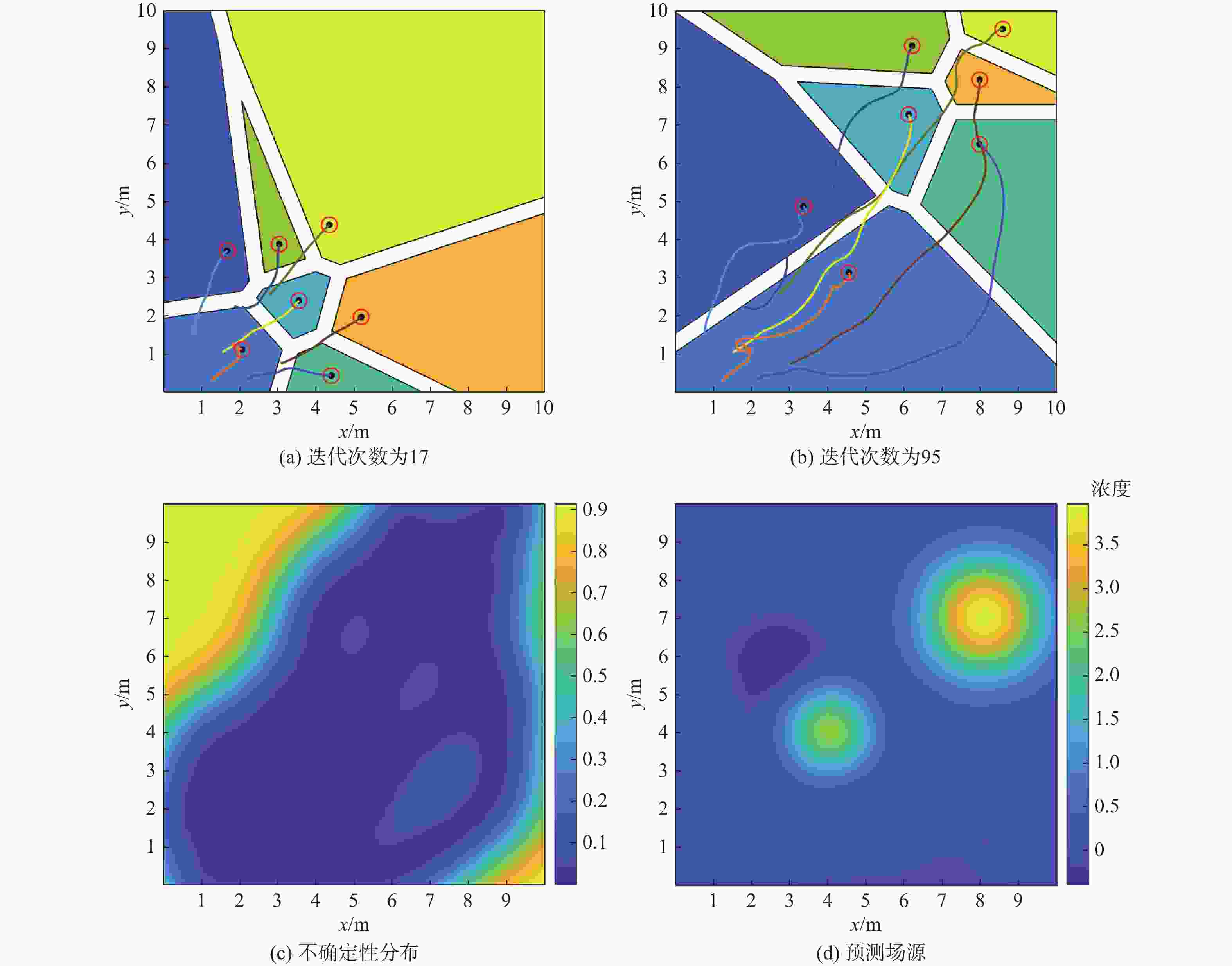
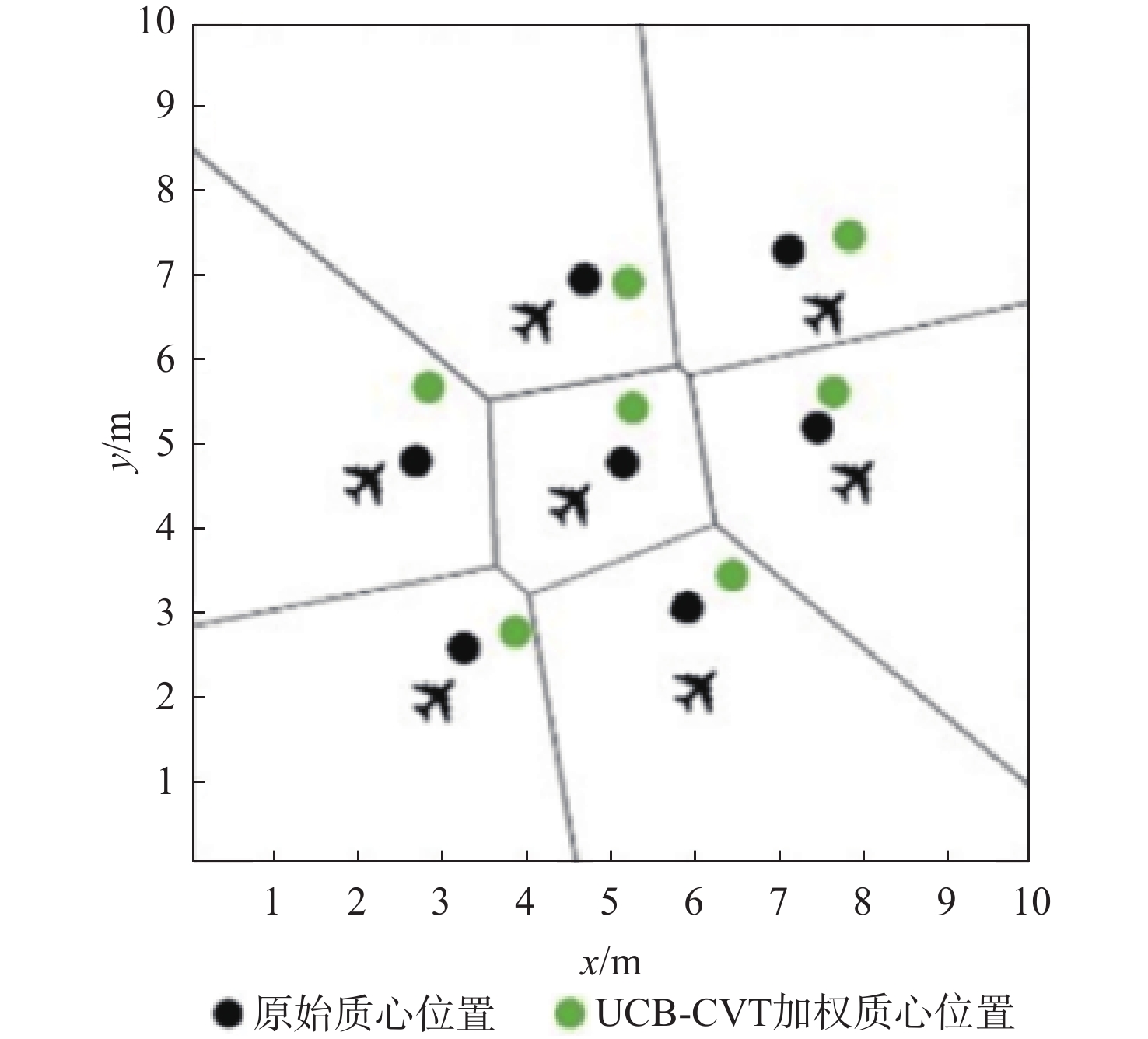
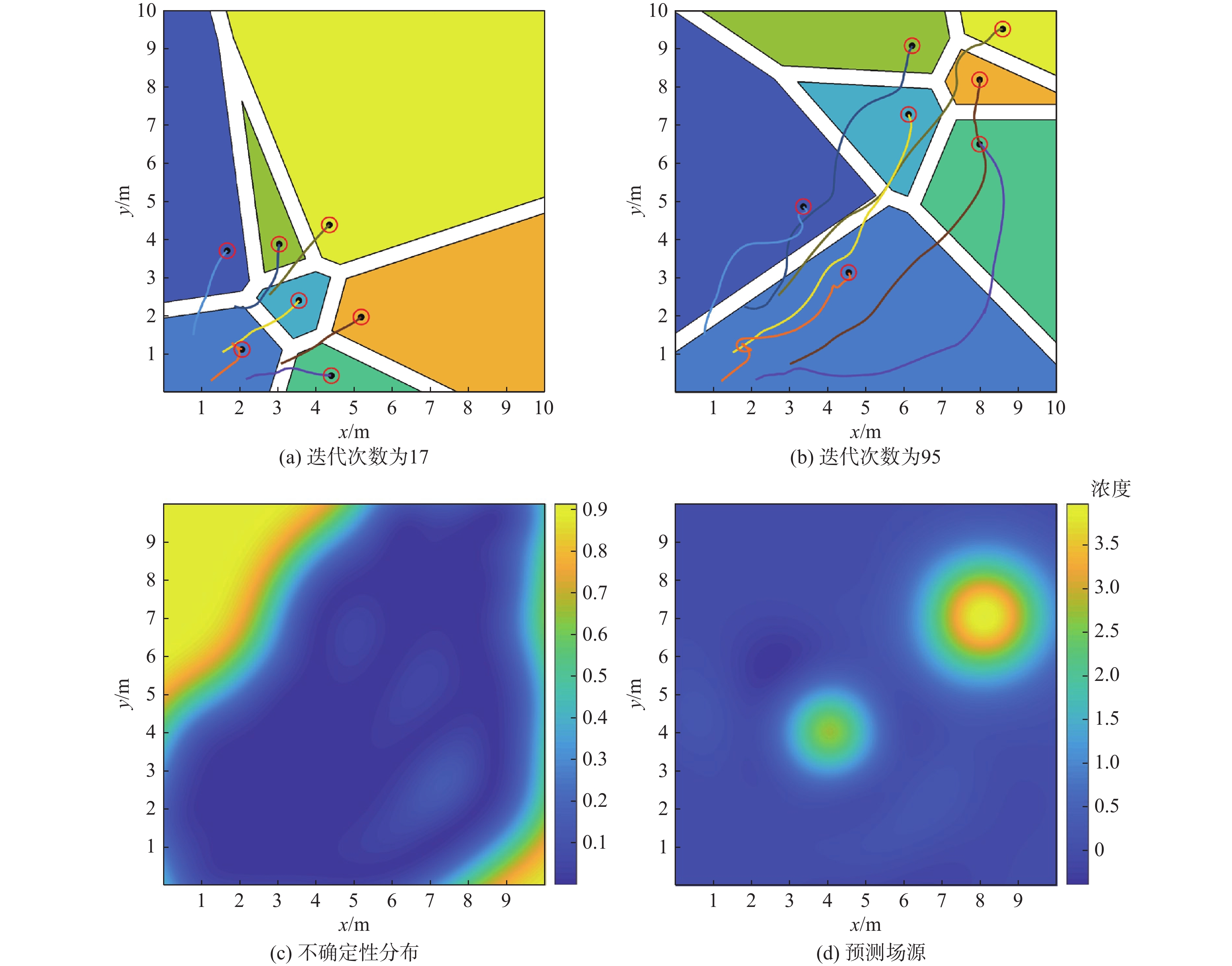
图 6 多源密度函数下的UCB-CVT算法仿真
Figure 6. Simulation of UCB-CVT algorithm under multiple source density function
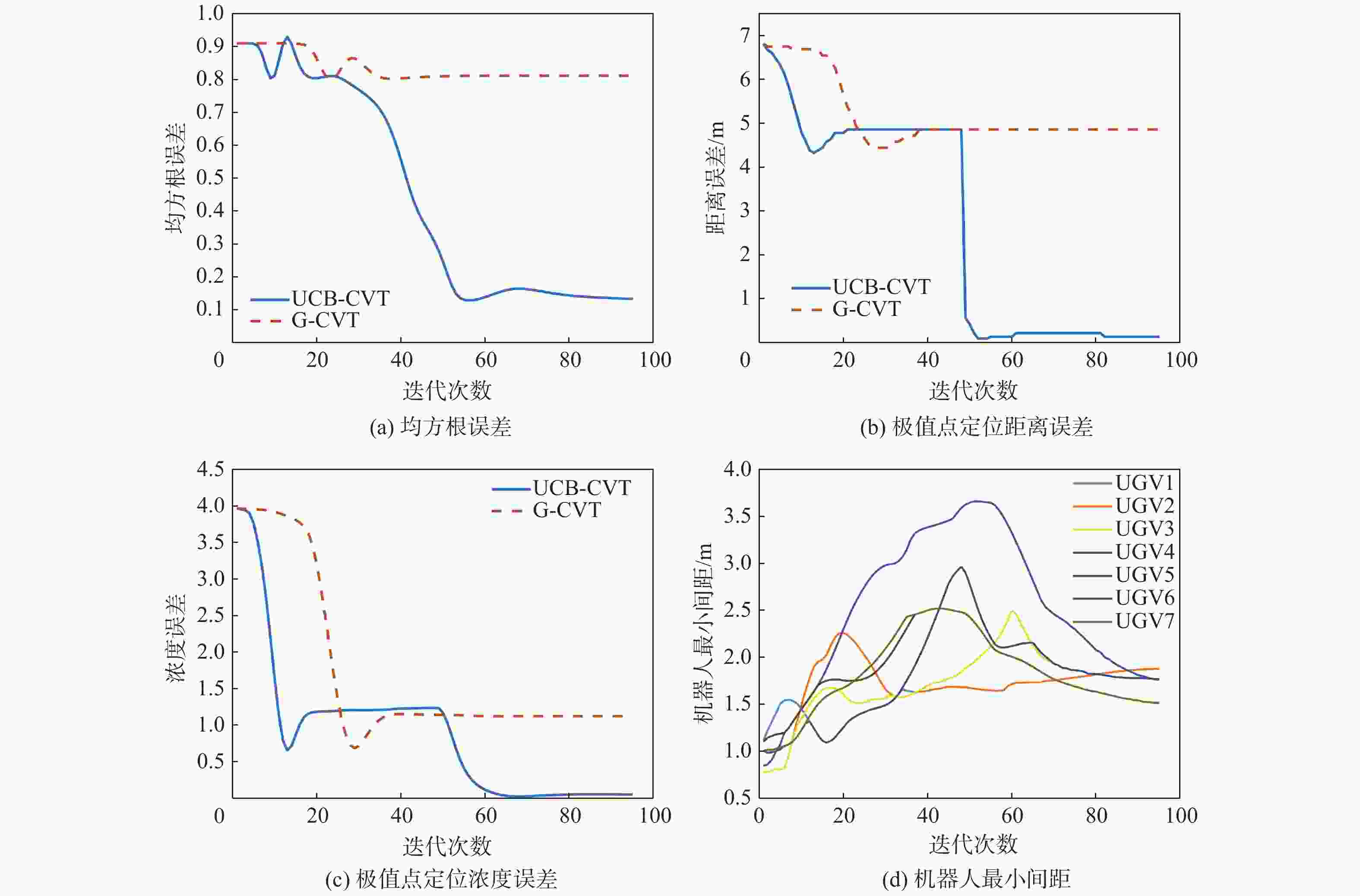
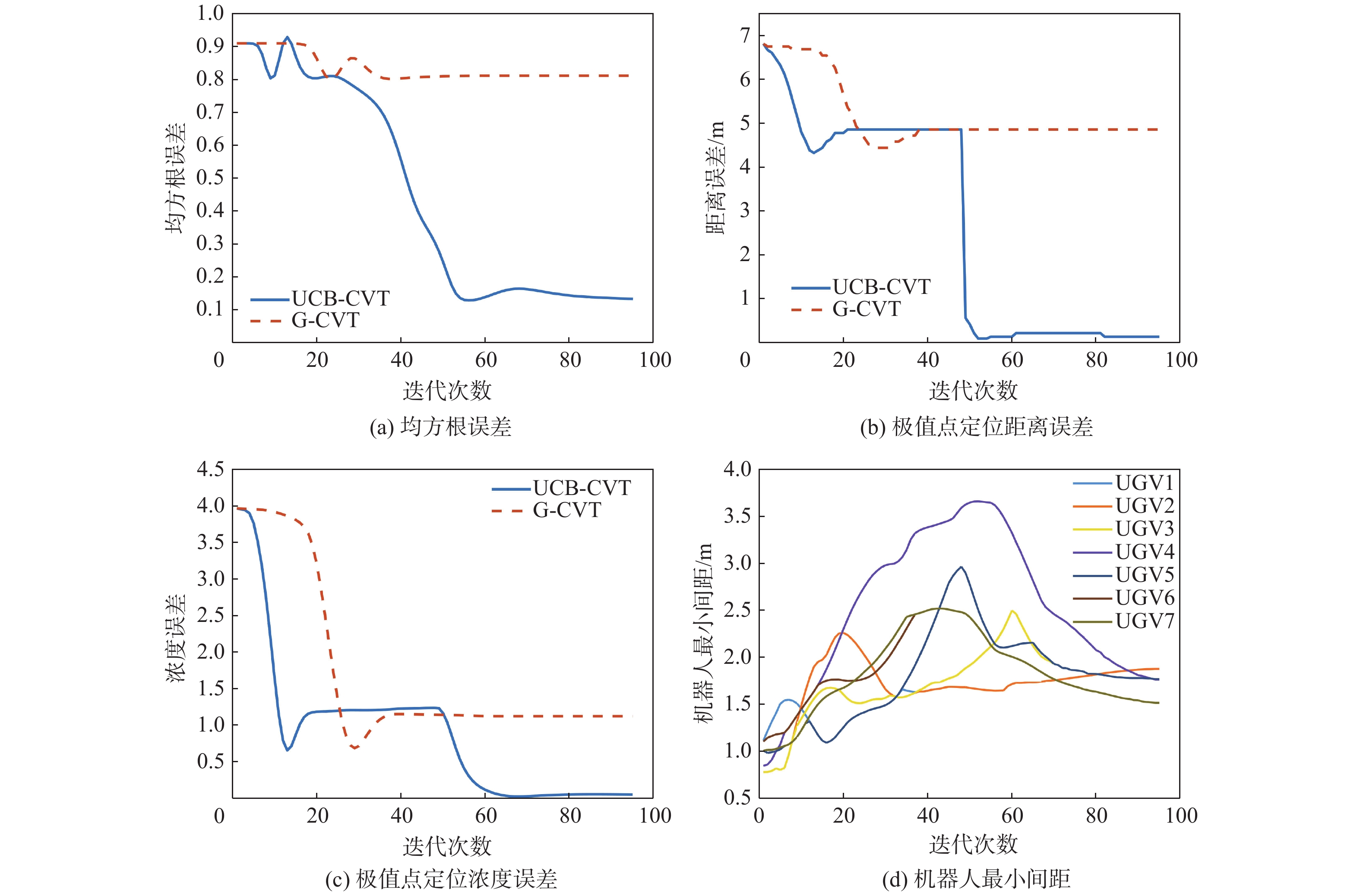
图 7 UCB-CVT与G-CVT的评价指标对比
Figure 7. Comparison of evaluation metrics between UCB-CVT and G-CVT
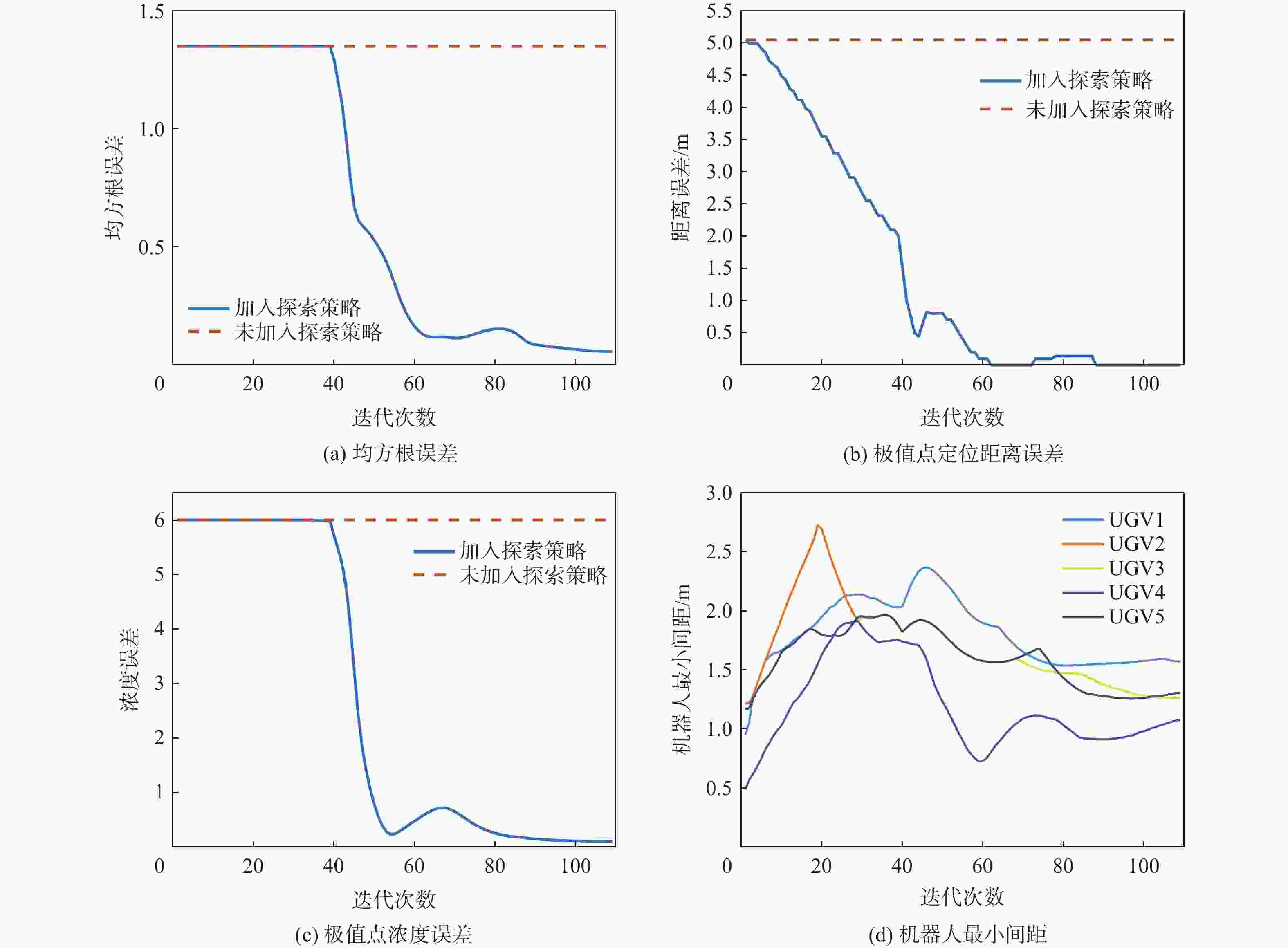
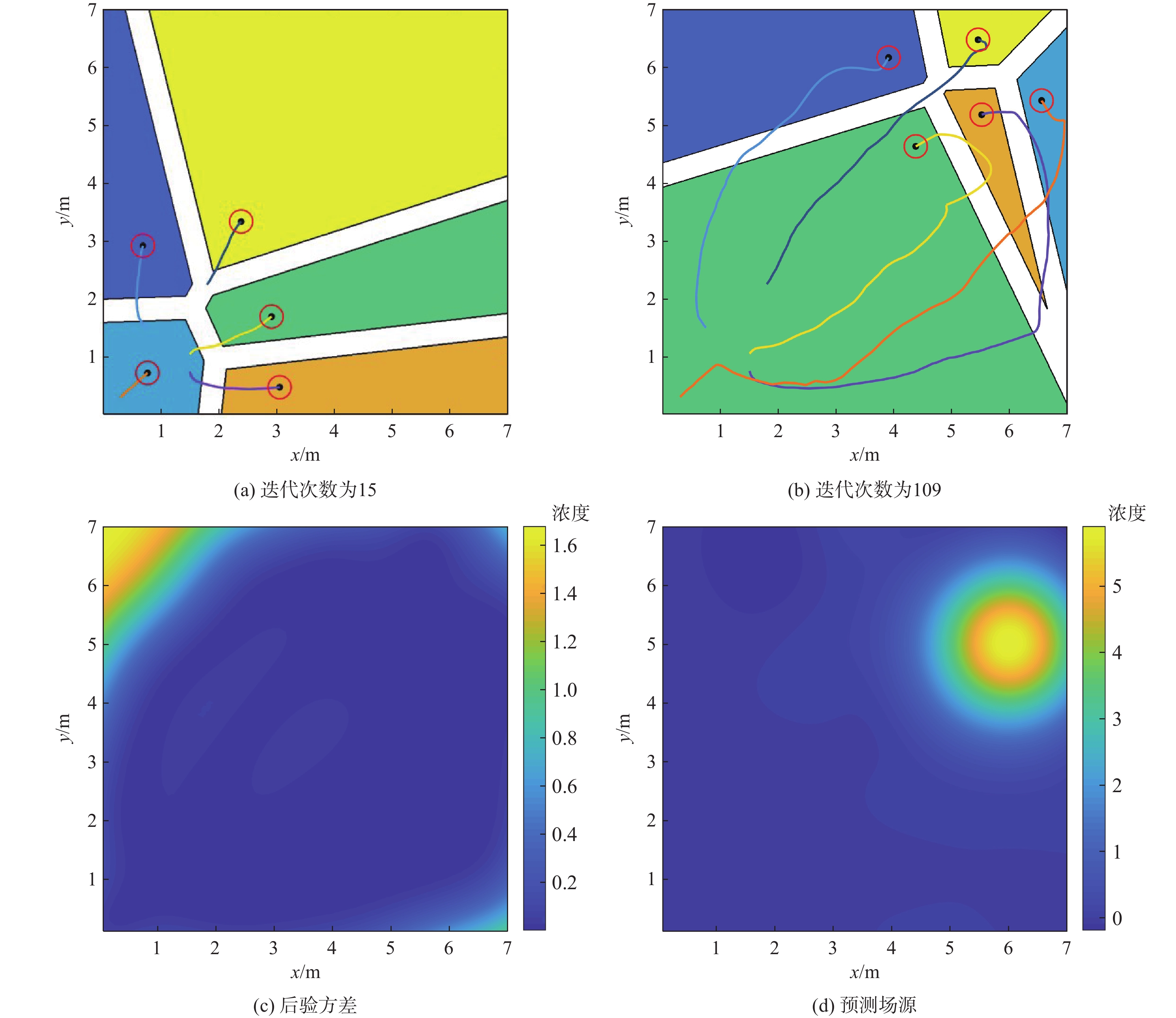
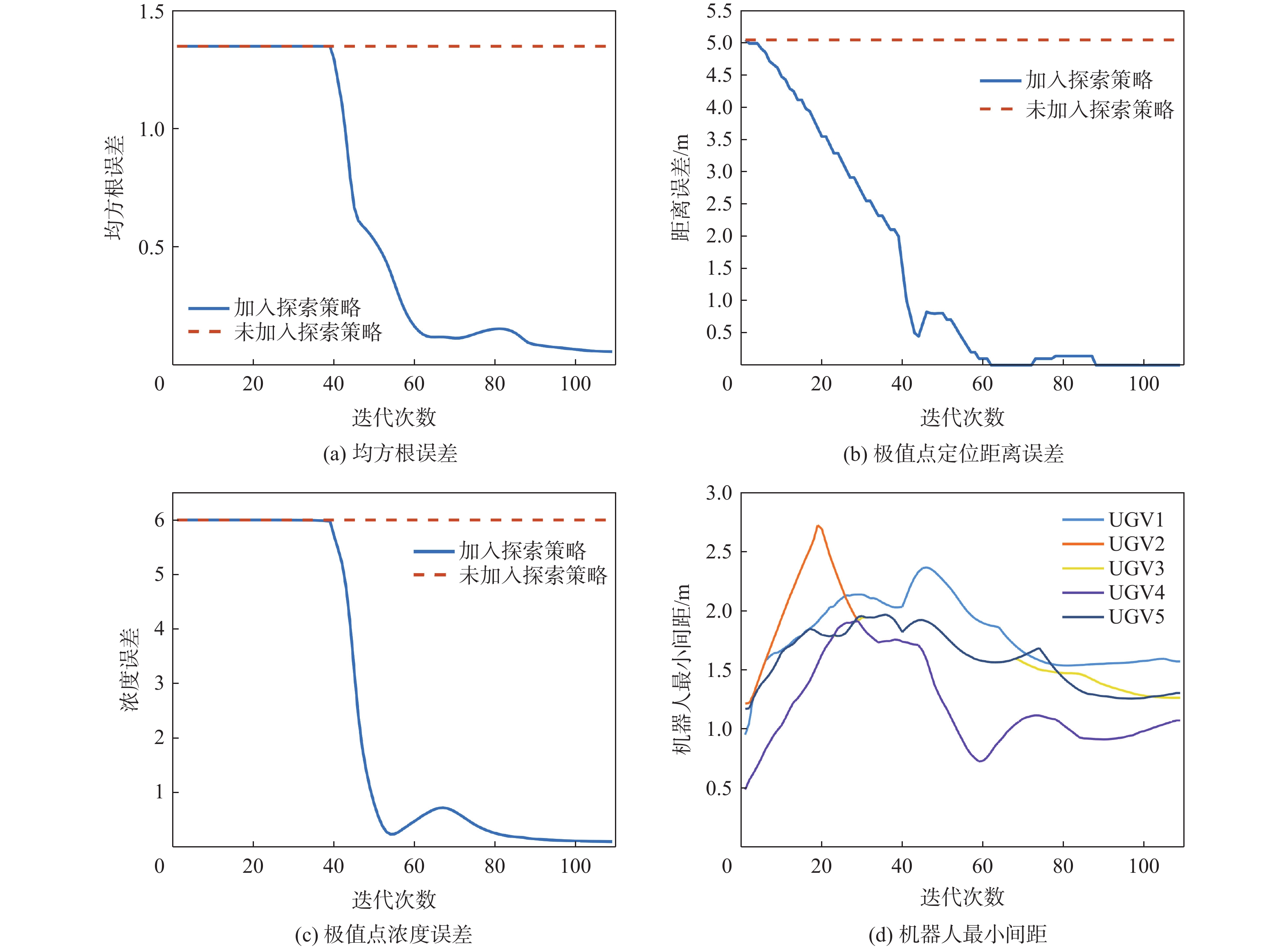
图 10 加入探索策略与未加入探索策略的评价指标对比
Figure 10. Comparison of evaluation metrics with and without exploration strategy
-
[1] JIANG M R, LIAO Y, GUO X, et al. A comparative experimental study of two multi-robot olfaction methods: towards locating time-varying indoor pollutant sources[J]. Building and Environment, 2022, 207: 108560. [2] 段安娜, 周锐, 邸斌. 考虑先验信息的多机器人重点区域协同覆盖[J]. 北京航空航天大学学报, 2023, 49(6): 1479-1486.DUAN A N, ZHOU R, DI B. Multi-robot cooperative coverage of key regions considering prior information[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(6): 1479-1486 (in Chinese). [3] FU Z J, CHEN Y M, DING Y J, et al. Pollution source localization based on multi-UAV cooperative communication[J]. IEEE Access, 2019, 7: 29304-29312. doi: 10.1109/ACCESS.2019.2900475 [4] 宁宇铭, 李团结, 姚聪, 等. 基于快速扩展随机树-贪婪边界搜索的多机器人协同空间探索方法[J]. 机器人, 2022, 44(6): 708-719.NING Y M, LI T J, YAO C, et al. Multi-robot cooperative space exploration method based on rapidly-exploring random trees and greedy frontier-based exploration[J]. Robot, 2022, 44(6): 708-719 (in Chinese). [5] FRANCIS A, LI S, GRIFFITHS C, et al. Gas source localization and mapping with mobile robots: a review[J]. Journal of Field Robotics, 2022, 39(8): 1341-1373. doi: 10.1002/rob.22109 [6] TRAN V P, GARRATT M A, KASMARIK K, et al. Dynamic frontier-led swarming: multi-robot repeated coverage in dynamic environments[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(3): 646-661. [7] EL ROMEH A, MIRJALILI S. Multi-robot exploration of unknown space using combined meta-heuristic salp swarm algorithm and deterministic coordinated multi-robot exploration[J]. Sensors, 2023, 23(4): 2156. [8] CHOUDHURY S, GUPTA J K, KOCHENDERFER M J, et al. Dynamic multi-robot task allocation under uncertainty and temporal constraints[J]. Autonomous Robots, 2022, 46(1): 231-247. doi: 10.1007/s10514-021-10022-9 [9] GUL F, MIR A, MIR I, et al. A centralized strategy for multi-agent exploration[J]. IEEE Access, 2022, 10: 126871-126884. doi: 10.1109/ACCESS.2022.3218653 [10] ZHAO M, LU H, CHENG S, et al. A multi-robot cooperative exploration algorithm considering working efficiency and working load[J]. Applied Soft Computing, 2022, 128: 109482. doi: 10.1016/j.asoc.2022.109482 [11] HONG L, CUI W C, CHEN H. A novel multi-robot task allocation model in marine plastics cleaning based on replicator dynamics[J]. Journal of Marine Science and Engineering, 2021, 9(8): 879. [12] JANG H, PARK M, OH H. Improved Socialtaxis for information-theoretic source search using cooperative multiple agents in turbulent environments[J]. Expert Systems with Applications, 2023, 225: 120033. doi: 10.1016/j.eswa.2023.120033 [13] LI H, YUAN J, YUAN H. An active olfaction approach using deep reinforcement learning for indoor attenuation odor source localization[J]. IEEE Sensors Journal, 2024, 24(9): 14561-14572. doi: 10.1109/JSEN.2024.3373610 [14] AN S, PARK M, OH H. Receding-horizon RRT-Infotaxis for autonomous source search in urban environments[J]. Aerospace Science and Technology, 2022, 120: 107276. doi: 10.1016/j.ast.2021.107276 [15] AL REDWAN NEWAZ A, ALSAYEGH M, ALAM T, et al. Decentralized multi-robot information gathering from unknown spatial fields[J]. IEEE Robotics and Automation Letters, 2023, 8(5): 3070-3077. doi: 10.1109/LRA.2023.3264720 [16] LIU Y, HARVEY C M, HAMLYN F E, et al. Bayesian estimation and reconstruction of marine surface contaminant dispersion[J]. Science of the Total Environment, 2024, 907: 167973. doi: 10.1016/j.scitotenv.2023.167973 [17] JIA H Y, KIKUMOTO H. Line source estimation of environmental pollutants using super-Gaussian geometry model and Bayesian inference[J]. Environmental Research, 2021, 194: 110706. doi: 10.1016/j.envres.2020.110706 [18] JABEEN M, MENG Q H, JING T, et al. Robot odor source localization in indoor environments based on gradient adaptive extremum seeking search[J]. Building and Environment, 2023, 229: 109983. doi: 10.1016/j.buildenv.2023.109983 [19] XIAO D H, WANG Y, CHENG Z. Agent-based autonomous pollution source localization for complex environment[J]. Journal of Ambient Intelligence and Humanized Computing, 2021, 12(10): 9481-9489. doi: 10.1007/s12652-020-02686-5 [20] SAADAOUI H, EL BOUANANI F. A local PSO-based algorithm for cooperative multi-UAV pollution source localization[J]. IEEE Access, 2022, 10: 106436-106450. doi: 10.1109/ACCESS.2022.3212079 [21] ZHU H B, WANG Y B, DU C J, et al. A novel odor source localization system based on particle filtering and information entropy[J]. Robotics and Autonomous Systems, 2020, 132: 103619. doi: 10.1016/j.robot.2020.103619 [22] 曹凯, 陈阳泉, 高嵩, 等. 基于健康管理的多机器人覆盖控制[J]. 传感技术学报, 2022, 35(7): 902-912.CAO K, CHEN Y Q, GAO S, et al. Multi-agent coverage control under health management[J]. Chinese Journal of Sensors and Actuators, 2022, 35(7): 902-912(in Chinese). [23] ZHAO Y, CHEN B, WANG X H, et al. A deep reinforcement learning based searching method for source localization[J]. Information Sciences, 2022, 588: 67-81. doi: 10.1016/j.ins.2021.12.041 [24] HU J Y, NIU H L, CARRASCO J, et al. Voronoi-based multi-robot autonomous exploration in unknown environments via deep reinforcement learning[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14413-14423. doi: 10.1109/TVT.2020.3034800 [25] ABDULGHAFOOR A Z, BAKOLAS E. Multi-agent distributed optimal control for tracking large-scale multi-target systems in dynamic environments[J]. IEEE Transactions on Cybernetics, 2024, 54(5): 2866-2879. doi: 10.1109/TCYB.2023.3302288 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 698
- HTML全文浏览量: 183
- PDF下载量: 27
- 被引次数: 0
