



-
摘要:
通过结合控制障碍函数与神经网络控制器,提出一种无人机安全降落控制策略。对控制障碍函数和无人机动力学模型进行了介绍,为后续的算法设计提供了理论基础。通过水平集方法构造控制障碍函数,并将其与神经网络控制器相结合,提出一种在避障和安全降落过程中均能有效保障无人机安全的控制策略。对所提算法进行仿真实验,验证了所提控制策略在避障和安全降落方面的有效性,展示了无人机在机动能力受限及姿态约束下的安全避障能力。对所提算法的效果进行总结,并对未来研究的方向进行了展望。
Abstract:This article proposes a safe landing control strategy for unmanned aerial vehicle (UAVs) by integrating control barrier functions with neural network controllers. Initially, control barrier functions and UAV’s dynamical models are introduced, providing a theoretical foundation for subsequent algorithm design. Then, a control approach is proposed that uses the level set method to design control barrier functions and combine them with neural network controllers to successfully ensure UAV safety during obstacle avoidance and safe landing. Simulation experiments then validate the effectiveness of the proposed control strategy in obstacle avoidance and safe landing, demonstrating the UAV’s safe obstacle avoidance capabilities under limited maneuverability and attitude constraints. The success of the suggested algorithm is finally summed up, and potential research avenues are examined.
-
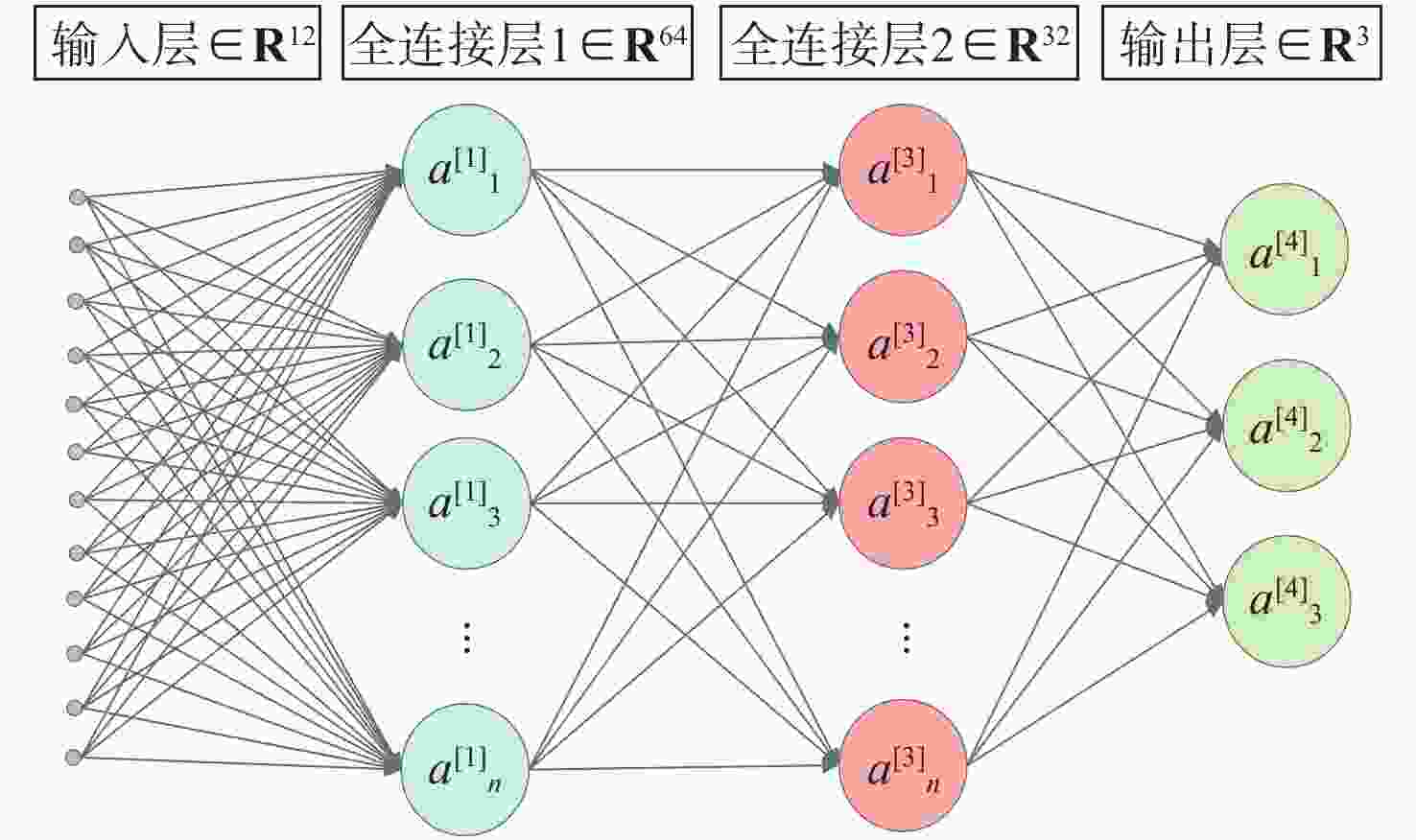
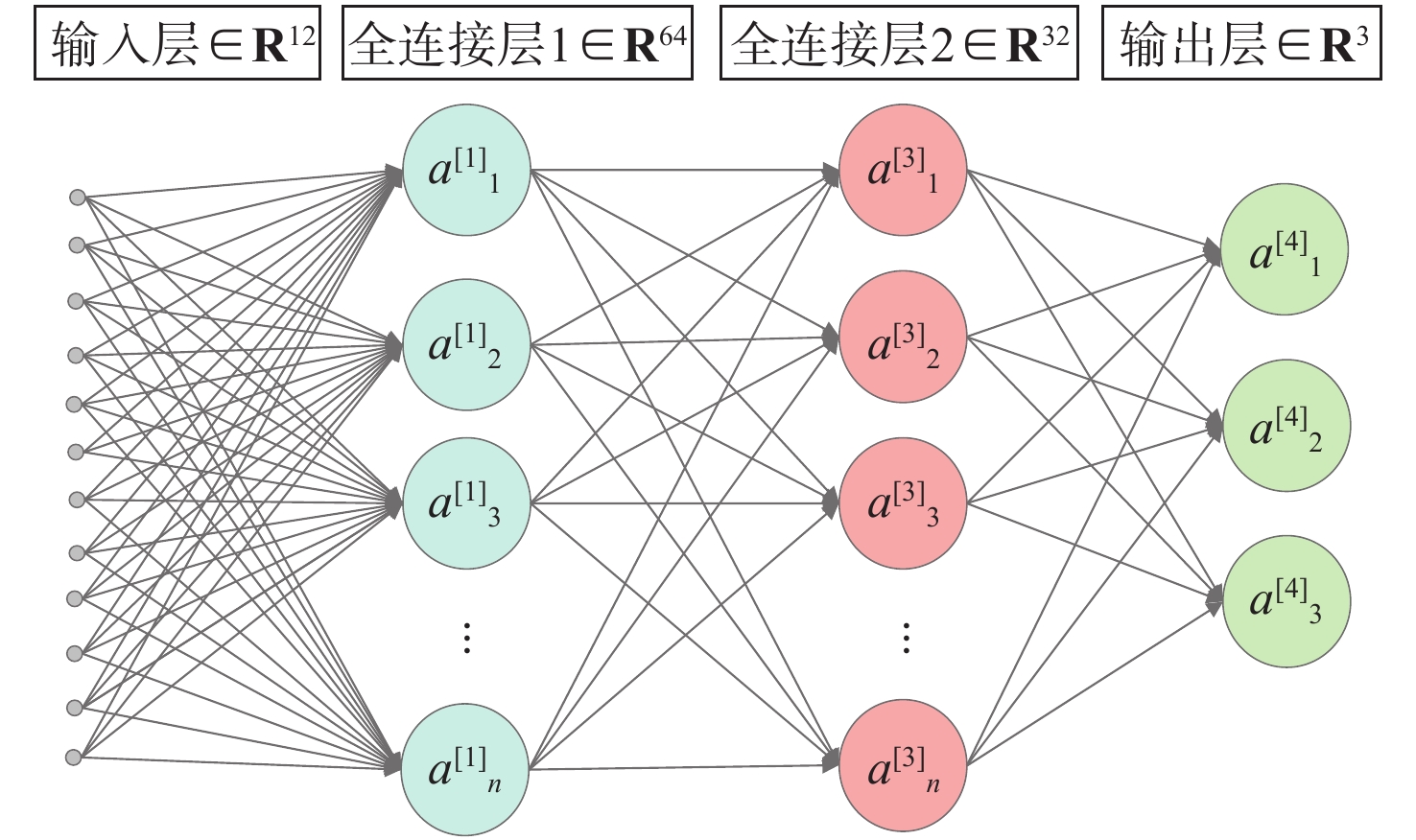
图 3 神经网络连接结构示意图
Figure 3. Schematic diagram of the neural network connection structure
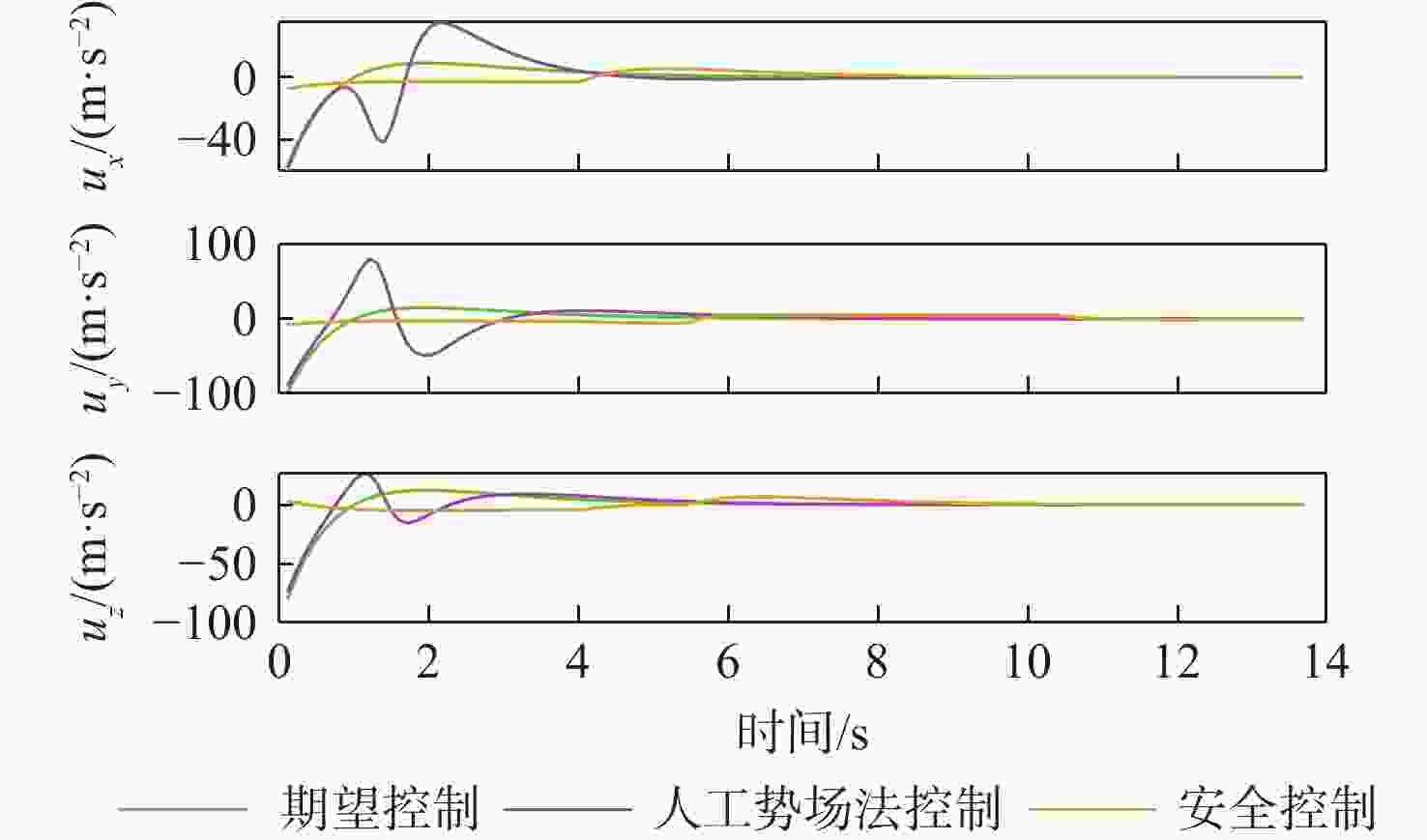
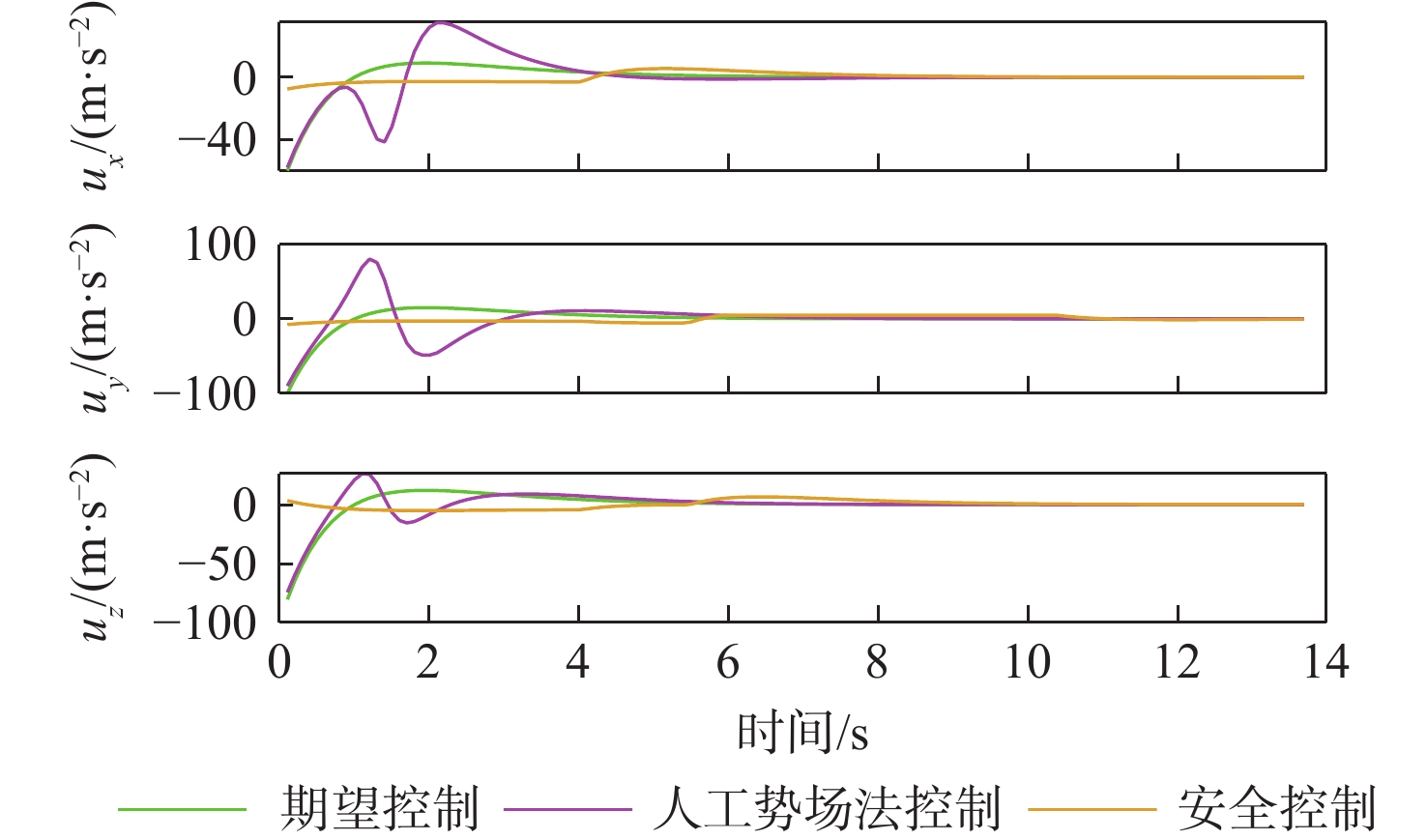
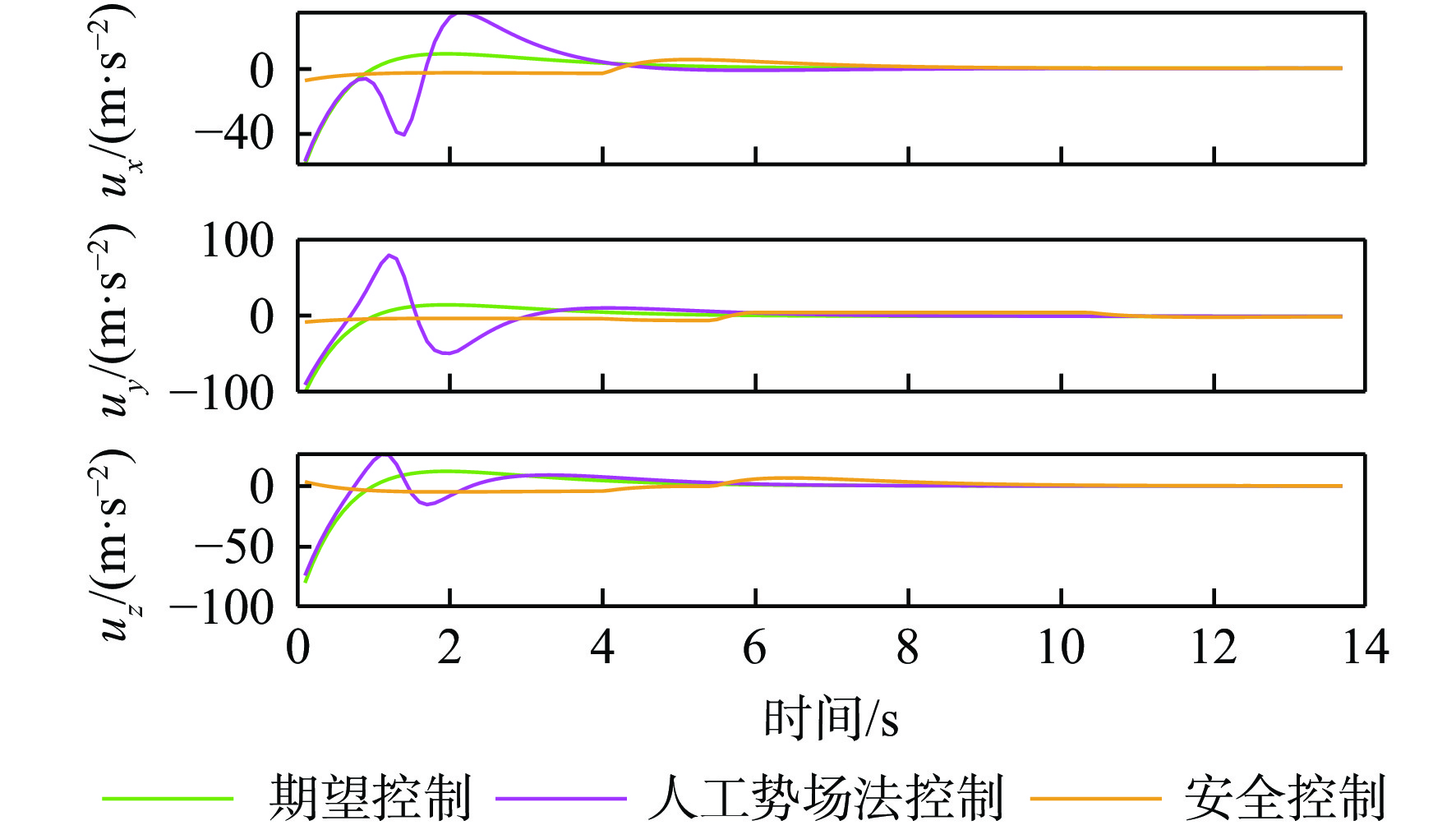
图 5 静止平台无人机安全降落控制指令
Figure 5. Control commands for safe drone landing for static platform UAV
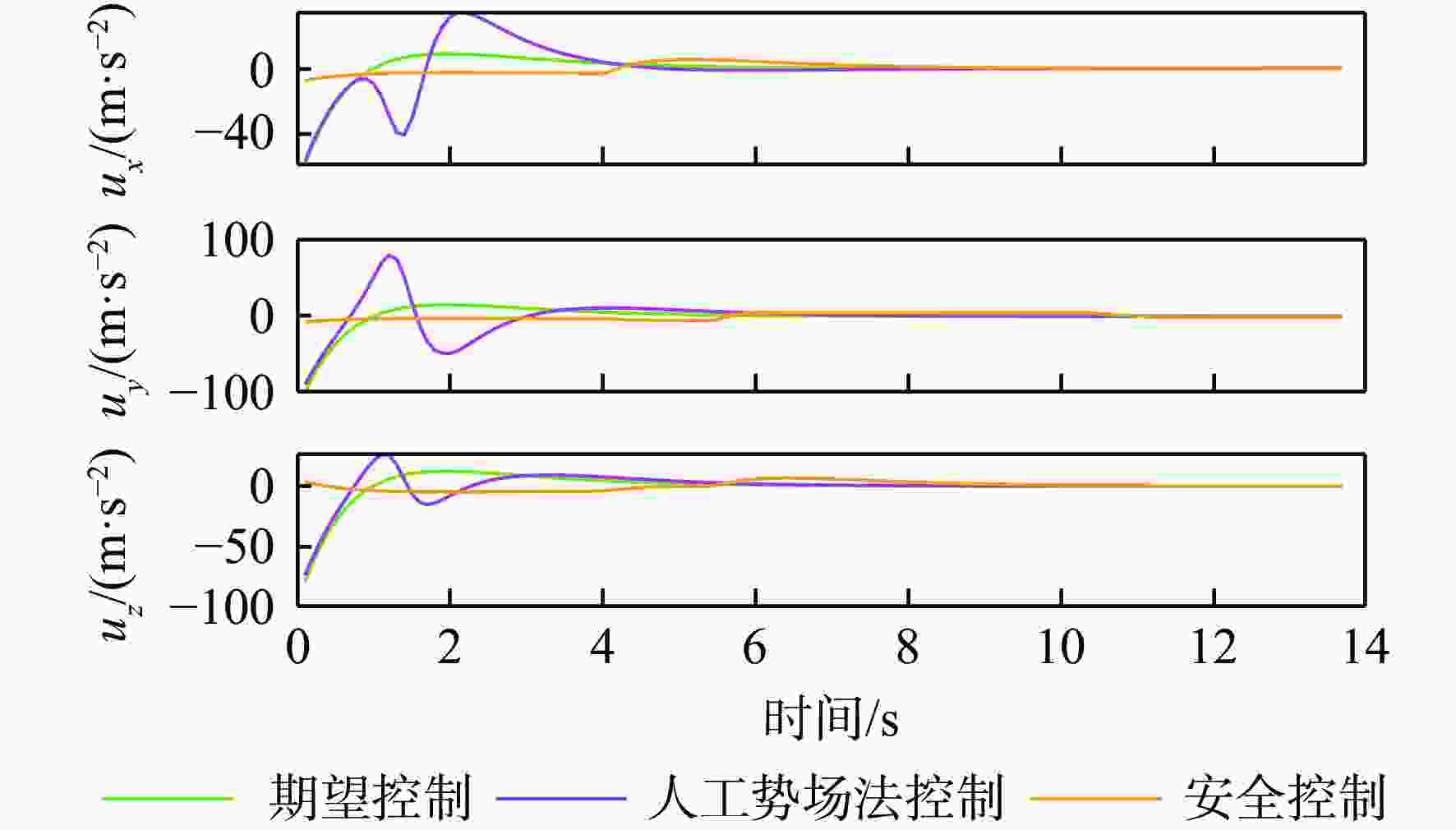
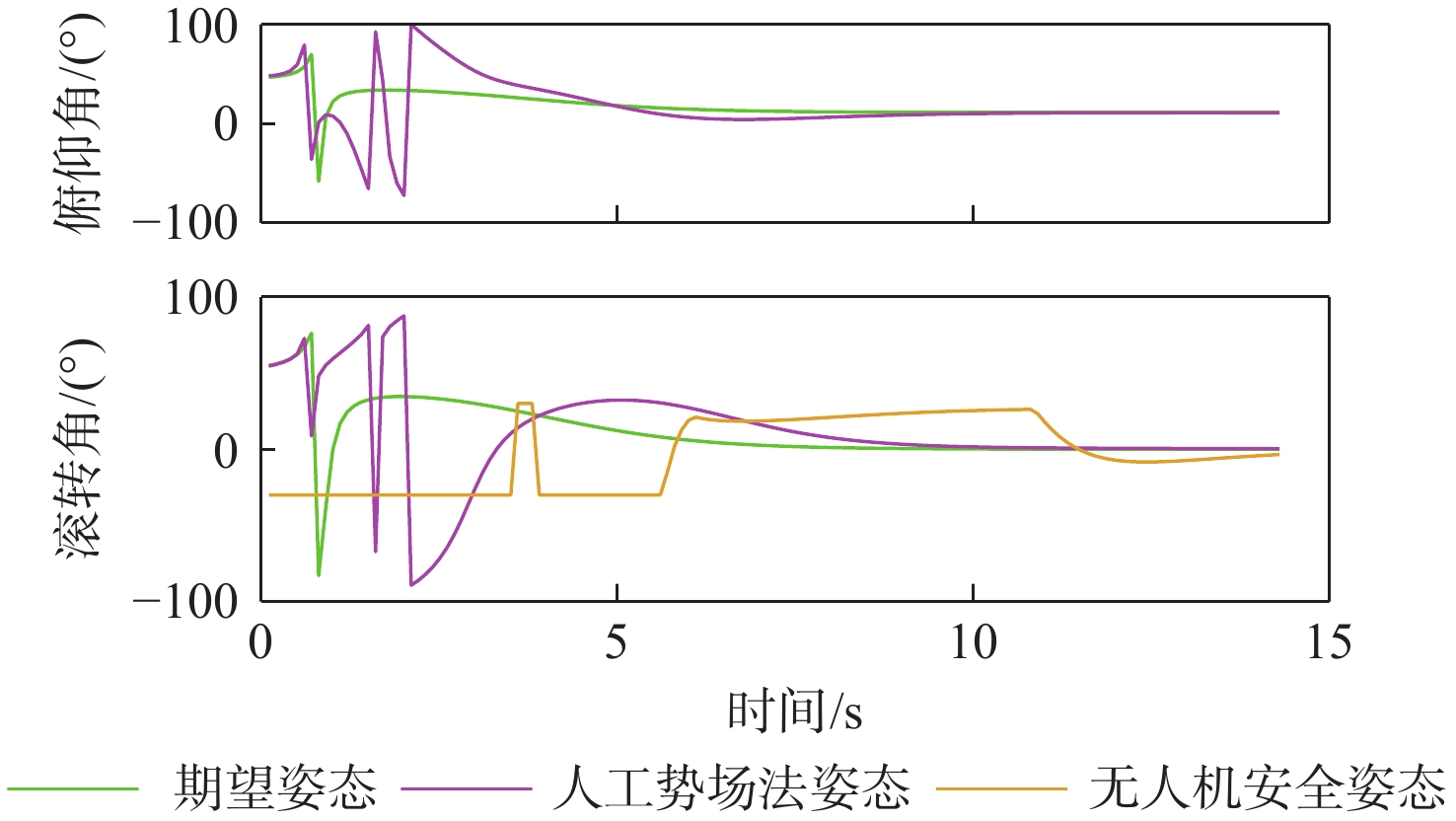
图 6 静止平台无人机安全降落姿态约束
Figure 6. Attitude constraints for safe drone landing for static platform UAV
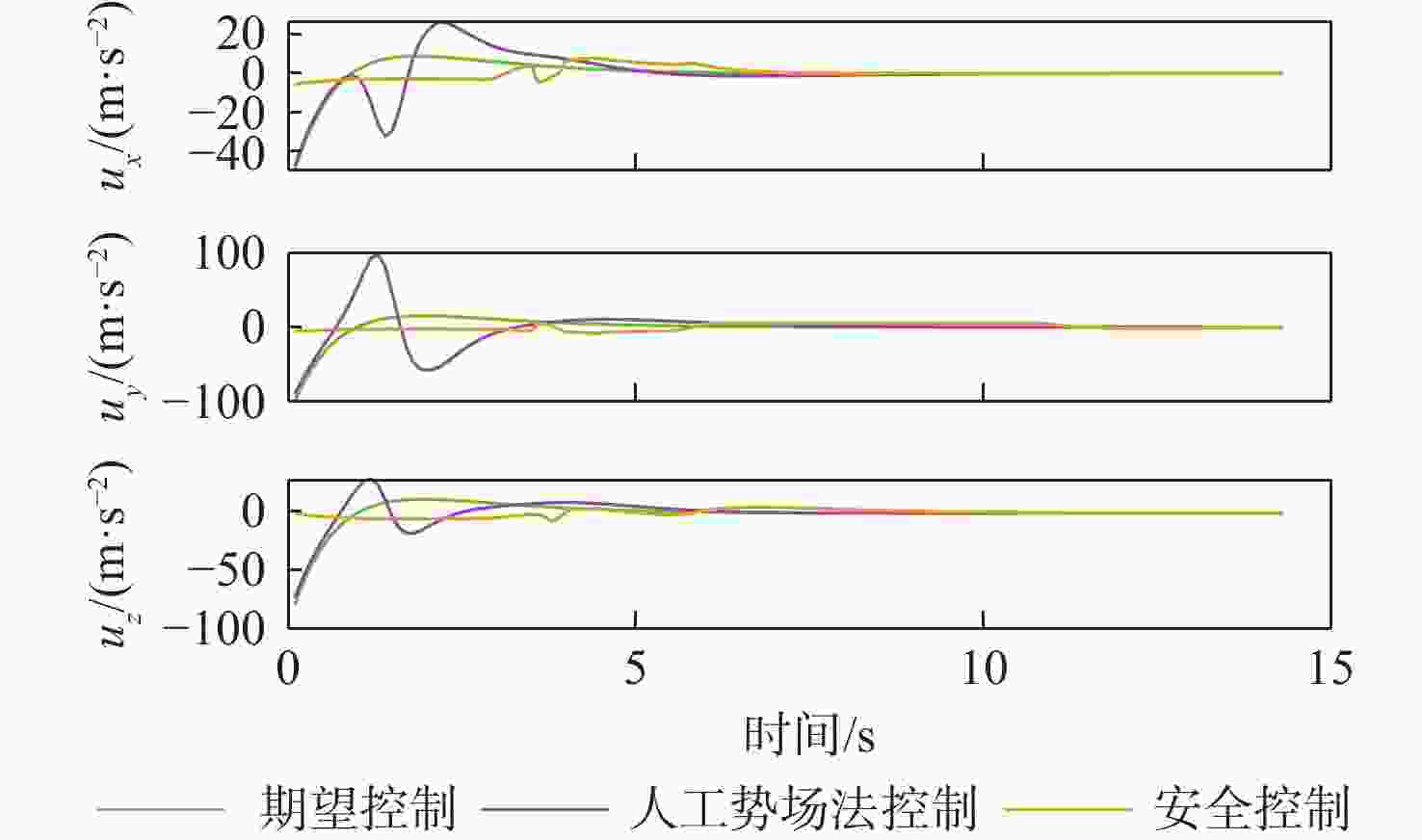
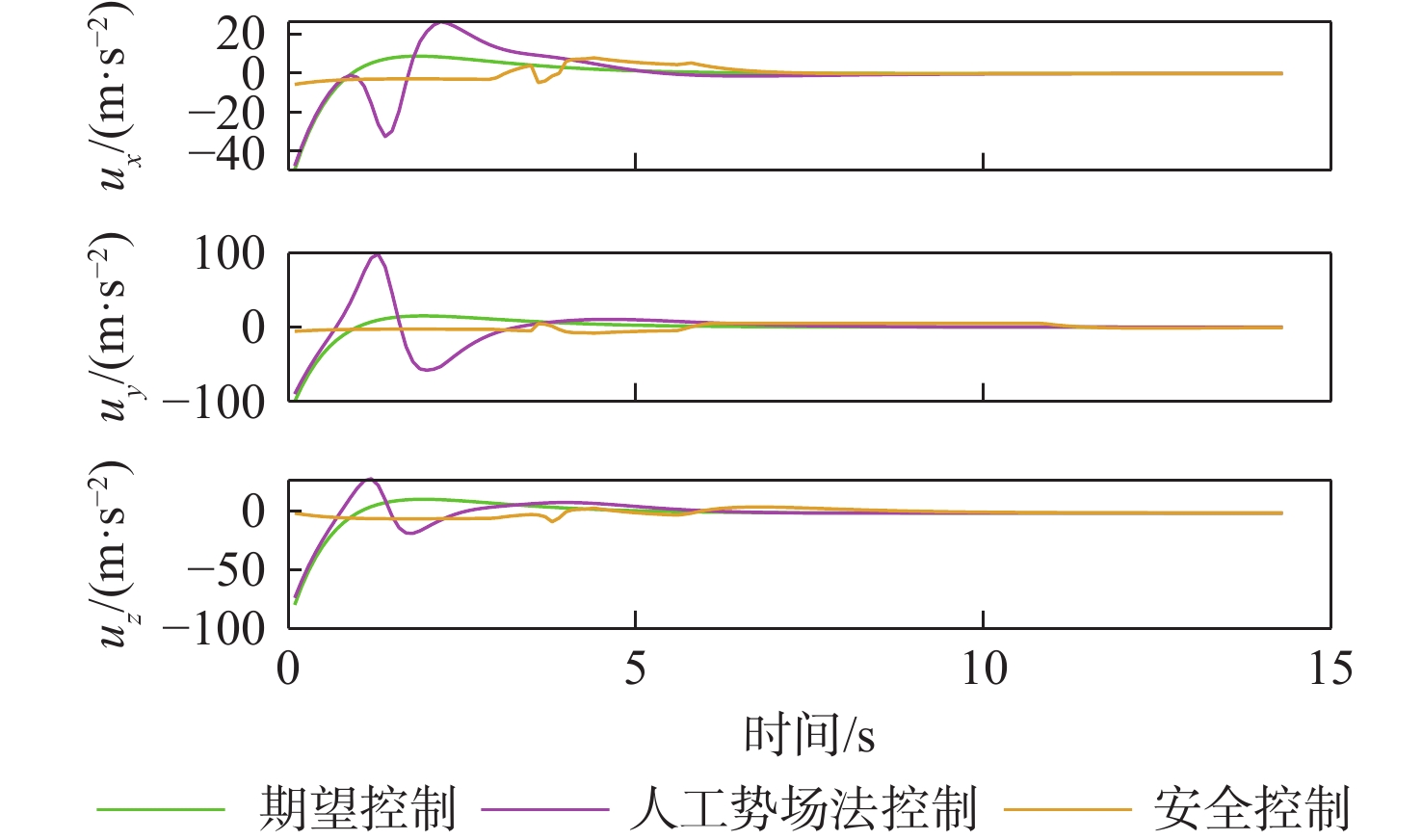
图 8 移动平台无人机安全降落控制指令
Figure 8. Control commands for safe drone landing for moving platform UAV
-
[1] PUEYO P, DENDARIETA J, MONTIJANO E, et al. CineMPC: a fully autonomous drone cinematography system incorporating zoom, focus, pose, and scene composition[J]. IEEE Transactions on Robotics, 2024, 40: 1740-1757. doi: 10.1109/TRO.2024.3353550 [2] KUANG Q, JIN X, ZHAO Q P, et al. Deep multimodality learning for UAV video aesthetic quality assessment[J]. IEEE Transactions on Multimedia, 2019, 22(10): 2623-2634. [3] SONG S H, YEON G Y, SHON H W, et al. Design and control of soft unmanned aerial vehicle “S-CLOUD”[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(1): 267-275. [4] SPICA R, CRISTOFALO E, WANG Z J, et al. A real-time game theoretic planner for autonomous two-player drone racing[J]. IEEE Transactions on Robotics, 2020, 36(5): 1389-1403. doi: 10.1109/TRO.2020.2994881 [5] LOQUERCIO A, KAUFMANN E, RANFTL R, et al. Deep drone racing: from simulation to reality with domain randomization[J]. IEEE Transactions on Robotics, 2020, 36(1): 1-14. doi: 10.1109/TRO.2019.2942989 [6] DI J, CHEN S F, LI P F, et al. A cooperative-competitive strategy for autonomous multidrone racing[J]. IEEE Transactions on Industrial Electronics, 2024, 71(7): 7485-7494. doi: 10.1109/TIE.2023.3299019 [7] CHUNG S J, PARANJAPE A A, DAMES P, et al. A survey on aerial swarm robotics[J]. IEEE Transactions on Robotics, 2018, 34(4): 837-855. doi: 10.1109/TRO.2018.2857475 [8] CHEN Y J, CHANG D K, ZHANG C. Autonomous tracking using a swarm of UAVs: A constrained multi-agent reinforcement learning approach[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 13702-13717. doi: 10.1109/TVT.2020.3023733 [9] DONG X W, LI Y F, LU C, et al. Time-varying formation tracking for UAV swarm systems with switching directed topologies[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(12): 3674-3685. doi: 10.1109/TNNLS.2018.2873063 [10] DU P F, SHI Y Q, CAO H T, et al. AI-enabled trajectory optimization of logistics UAVs with wind impacts in smart cities[J]. IEEE Transactions on Consumer Electronics, 2024, 70(1): 3885-3897. doi: 10.1109/TCE.2024.3355061 [11] PAN Y, CHEN Q W, ZHANG N, et al. Extending delivery range and decelerating battery aging of logistics UAVs using public buses[J]. IEEE Transactions on Mobile Computing, 2023, 22(9): 5280-5295. [12] BHATT K, POURMAND A, SIKKA N. Targeted applications of unmanned aerial vehicles (drones) in telemedicine[J]. Telemedicine Journal and e-Health, 2018, 24(11): 833-838. doi: 10.1089/tmj.2017.0289 [13] DEMIRHAN M, PREMACHANDRA C. Development of an automated camera-based drone landing system[J]. IEEE Access, 2020, 8: 202111-202121. doi: 10.1109/ACCESS.2020.3034948 [14] YANG D S, PANG Y H, ZHOU B W, et al. Fault diagnosis for energy internet using correlation processing-based convolutional neural networks[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(8): 1739-1748. doi: 10.1109/TSMC.2019.2919940 [15] LIU Y J, MA L, LIU L, et al. Adaptive neural network learning controller design for a class of nonlinear systems with time-varying state constraints[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(1): 66-75. doi: 10.1109/TNNLS.2019.2899589 [16] LIU L, LIU Y J, LI D P, et al. Barrier Lyapunov function-based adaptive fuzzy FTC for switched systems and its applications to resistance-inductance-capacitance circuit system[J]. IEEE Transactions on Cybernetics, 2020, 50(8): 3491-3502. doi: 10.1109/TCYB.2019.2931770 [17] OKULSKI M, ŁAWRYŃCZUK M. How much energy do we need to fly with greater agility? energy consumption and performance of an attitude stabilization controller in a quadcopter drone: a modified MPC vs. PID[J]. Energies, 2022, 15(4): 1380. doi: 10.3390/en15041380 [18] LOQUERCIO A, MAQUEDA A I, DEL-BLANCO C R, et al. DroNet: learning to fly by driving[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 1088-1095. doi: 10.1109/LRA.2018.2795643 [19] POLVARA R, PATACCHIOLA M, HANHEIDE M, et al. Sim-to-real quadrotor landing via sequential deep Q-networks and domain randomization[J]. Robotics, 2020, 9(1): 8. doi: 10.3390/robotics9010008 [20] ABO MOSALI N, SHAMSUDIN S S, MOSTAFA S A, et al. An adaptive multi-level quantization-based reinforcement learning model for enhancing UAV landing on moving targets[J]. Sustainability, 2022, 14(14): 8825. doi: 10.3390/su14148825 [21] XIE J Y, PENG X D, WANG H J, et al. UAV autonomous tracking and landing based on deep reinforcement learning strategy[J]. Sensors, 2020, 20(19): 5630. doi: 10.3390/s20195630 [22] XIAO W, BELTA C. High-order control barrier functions[J]. IEEE Transactions on Automatic Control, 2022, 67(7): 3655-3662. doi: 10.1109/TAC.2021.3105491 [23] XIA K W, HUANG Y T, ZOU Y, et al. Reinforcement learning control for moving target landing of VTOL UAVs with motion constraints[J]. IEEE Transactions on Industrial Electronics, 2024, 71(7): 7735-7744. doi: 10.1109/TIE.2023.3310014 [24] KHAN A, HEBERT M. Learning safe recovery trajectories with deep neural networks for unmanned aerial vehicles[C]//Proceedings of the 2018 IEEE Aerospace Conference. Piscataway: IEEE Press, 2018: 1-9. [25] GUPTA K, KAAKAI F, PESQUET-POPESCU B, et al. Safe design of stable neural networks for fault detection in small UAVs[C]//Proceedings of the SAFECOMP 2022 Workshops. Cham: Springer, 2022: 263-275. [26] CAI X, ZHU X Z, YAO W. FTESO-adaptive neural network based safety control for a quadrotor UAV under multiple disturbances: algorithm and experiments[J]. Industrial Robot: the International Journal of Robotics Research and Application, 2024, 51(1): 20-33. doi: 10.1108/IR-09-2023-0196 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 376
- HTML全文浏览量: 116
- PDF下载量: 23
- 被引次数: 0
