



Adaptive neural network based on fixed-time command-filtered control for quadrotor unmanned aerial vehicles
-
摘要:
针对四旋翼无人机在外部扰动和模型不确定性下的姿态跟踪问题,设计了一种基于自适应径向基函数(RBF)神经网络的固定时间指令滤波控制方法。设计了一种基于双曲正切函数的固定时间指令滤波器,避免了虚拟控制律推导过程中存在的“微分爆炸”问题,消除了传统滤波器由于引入分数阶而产生的奇异现象;利用RBF神经网络对模型不确定性进行逼近,并根据跟踪偏差设计了神经网络权值的自适应调节律,改善了在线逼近效果;此外,结合反步法和干扰观测器,设计了四旋翼无人机固定时间控制律,通过干扰观测器对外界扰动进行估计和补偿,实现了对目标姿态的快速、准确跟踪。基于Lyapunov理论严格证明了该方法的固定时间稳定性,并通过数值仿真验证了所提方法的有效性。
-
关键词:
- 自适应径向基函数神经网络 /
- 固定时间控制 /
- 指令滤波 /
- 反步法 /
- 四旋翼无人机
Abstract:For the quadrotor unmanned aerial vehicle (QUAV) attitude tracking problem under external disturbance and model uncertainty, a fixed-time command-filtered control approach is developed based on the composite adaptive radial basis function (RBF) neural network. Firstly, a fixed-time command filter based on the hyperbolic tangent function is proposed, which avoids the differential explosion problem during the derivation of virtual control and eliminates the singularity phenomena of traditional command filters with fractional order effectively. Secondly, the online approximation impact is enhanced by using a RBF neural network to approximate the model uncertainty and designing the adaptive adjustment law of neural network weights based on the tracking deviation. Additionally, combined with the backstepping method and disturbance observer, a fixed-time control strategy for the QUAV system is established, and the external disturbance is estimated and compensated by the disturbance observer, enabling rapid and accurate tracking of desired attitudes. The stability of the proposed control strategy is rigorously proved via Lyapunov theory. Finally, the effectiveness of the control strategy is verified by numerical simulation.
-
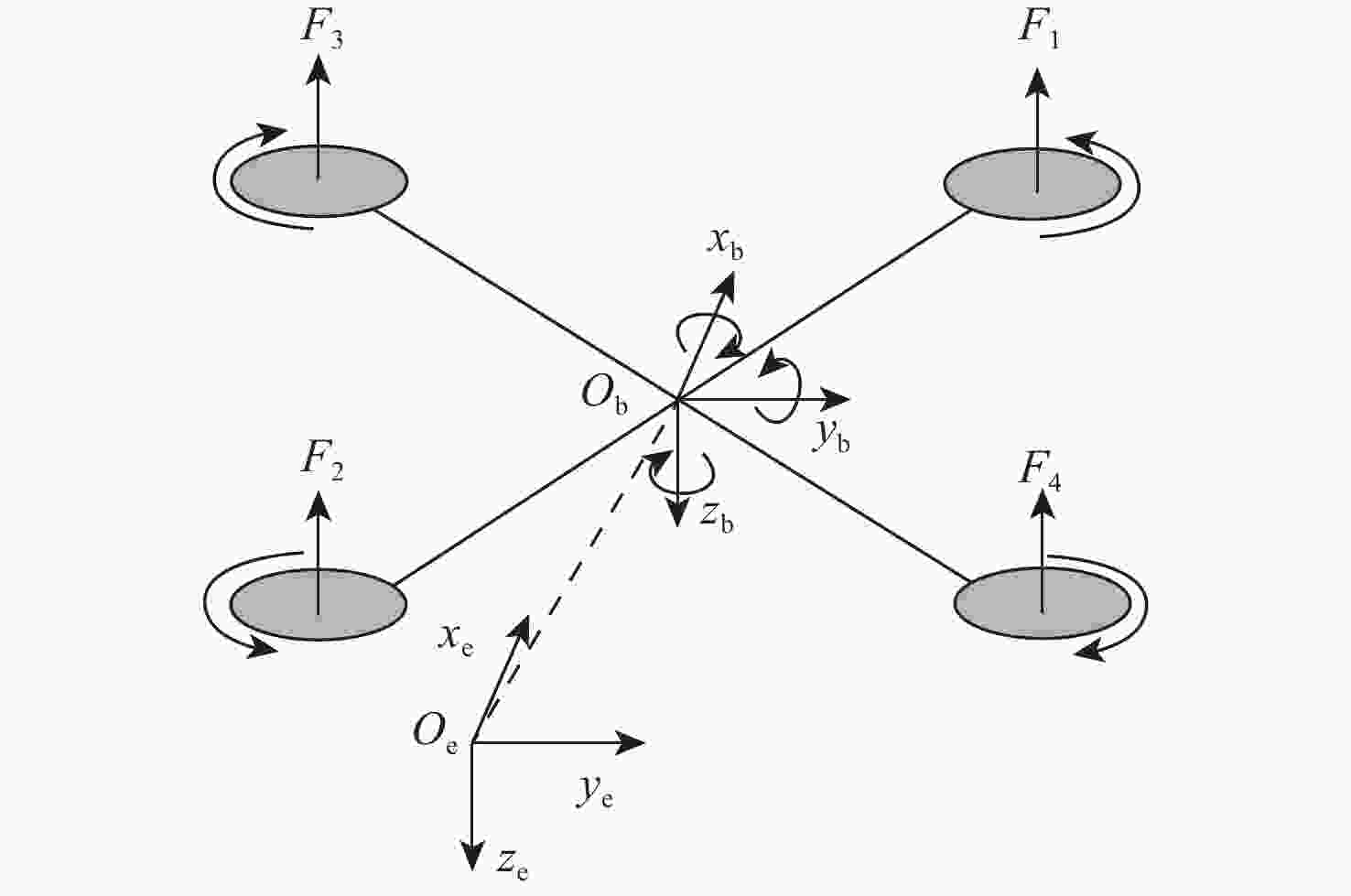
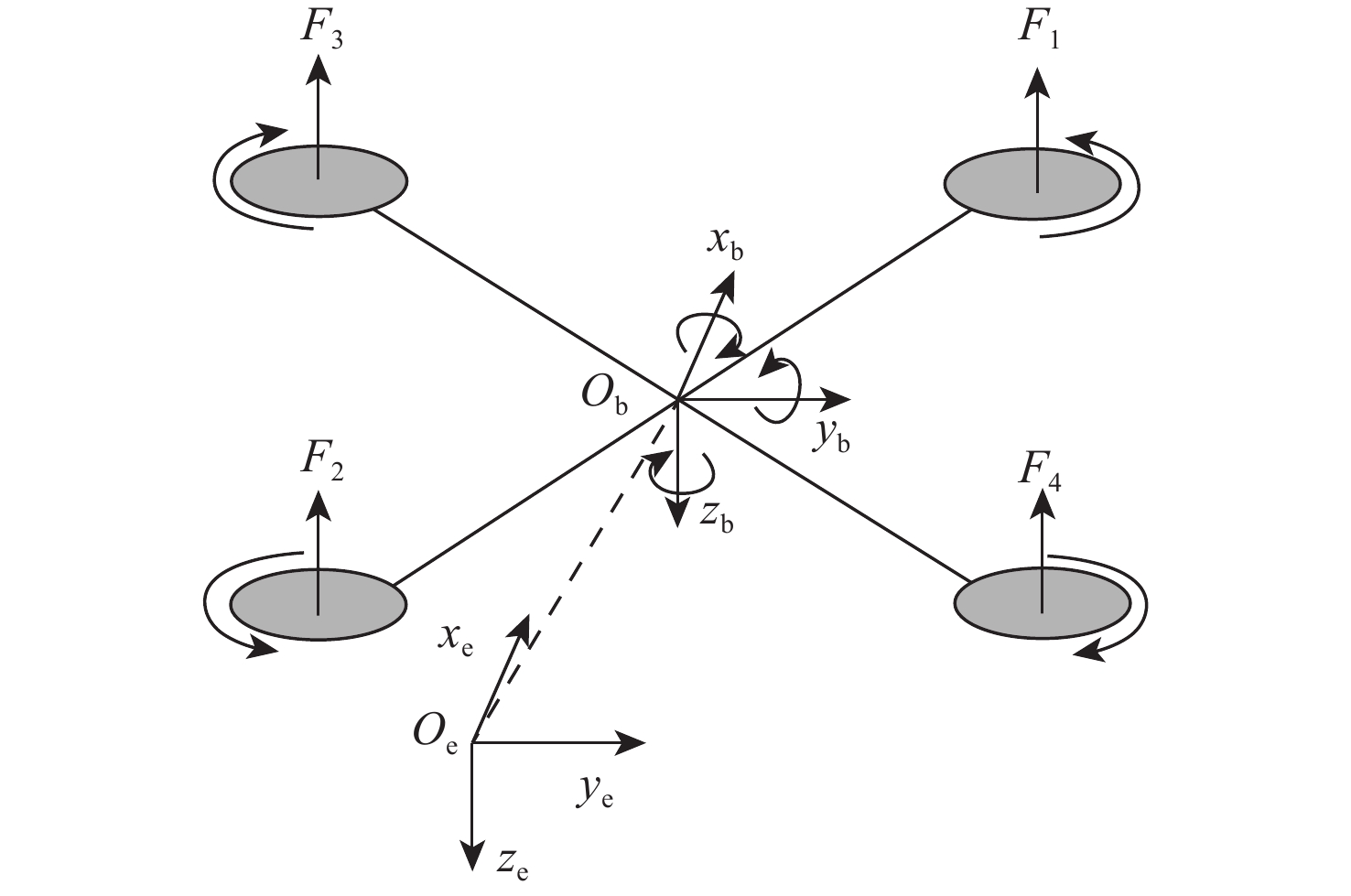
图 1 四旋翼无人机的参考坐标系
Figure 1. Reference coordinate system for quadrotor unmanned aerial vehicles
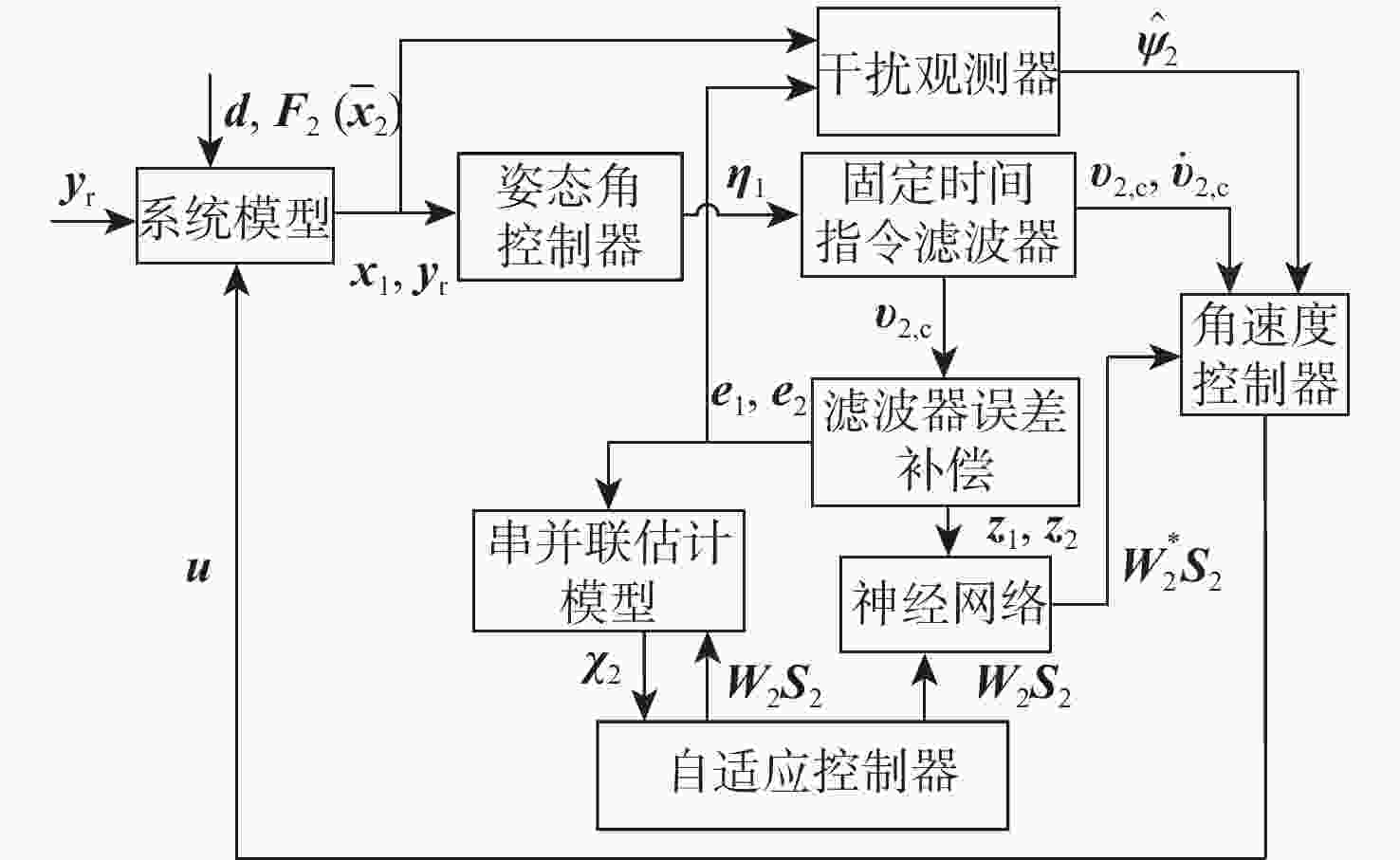
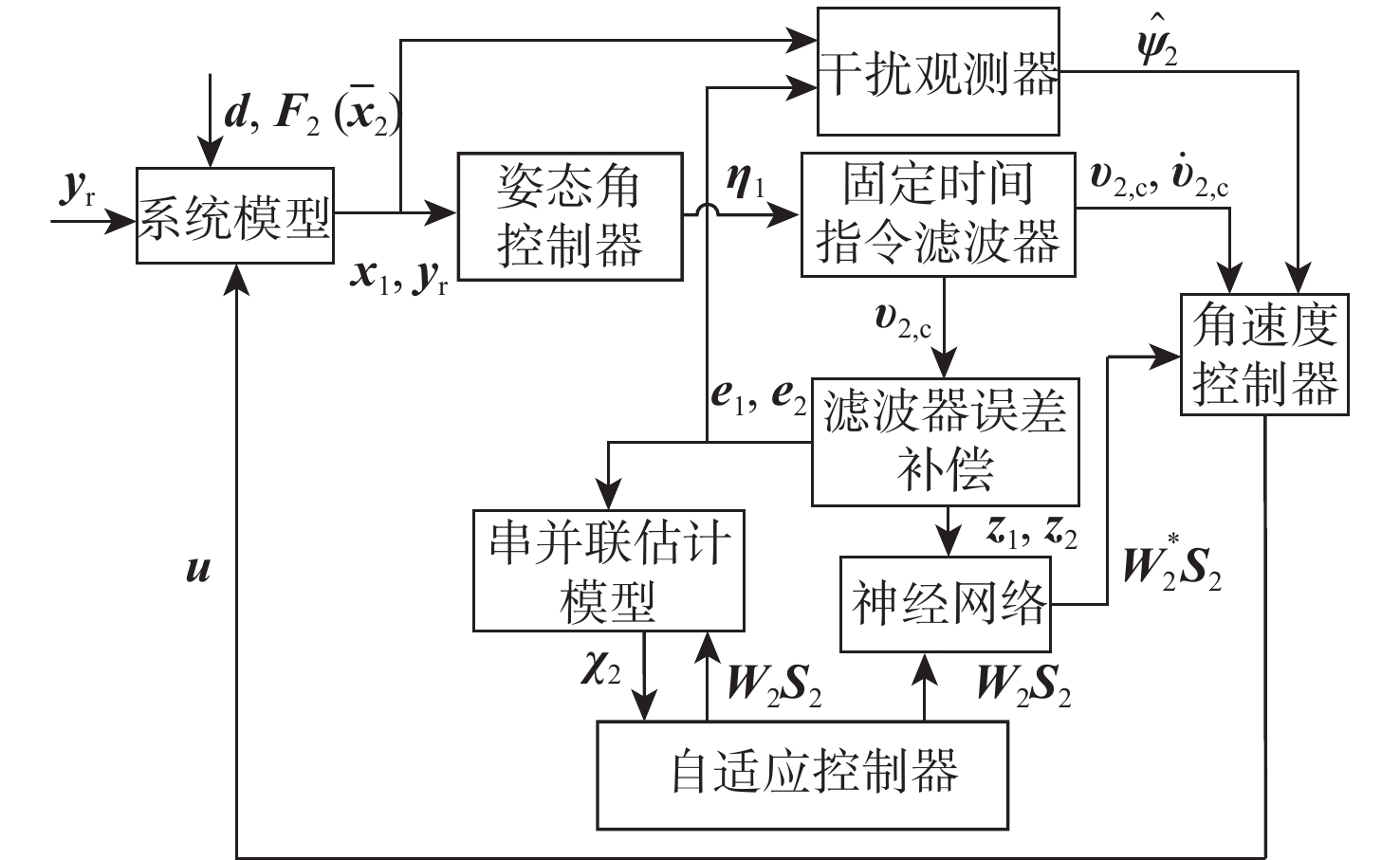
图 2 基于RBF神经网络的固定时间反步控制结构框图
Figure 2. Block diagram of the structure of fixed-time backstepping control based on RBF neural network
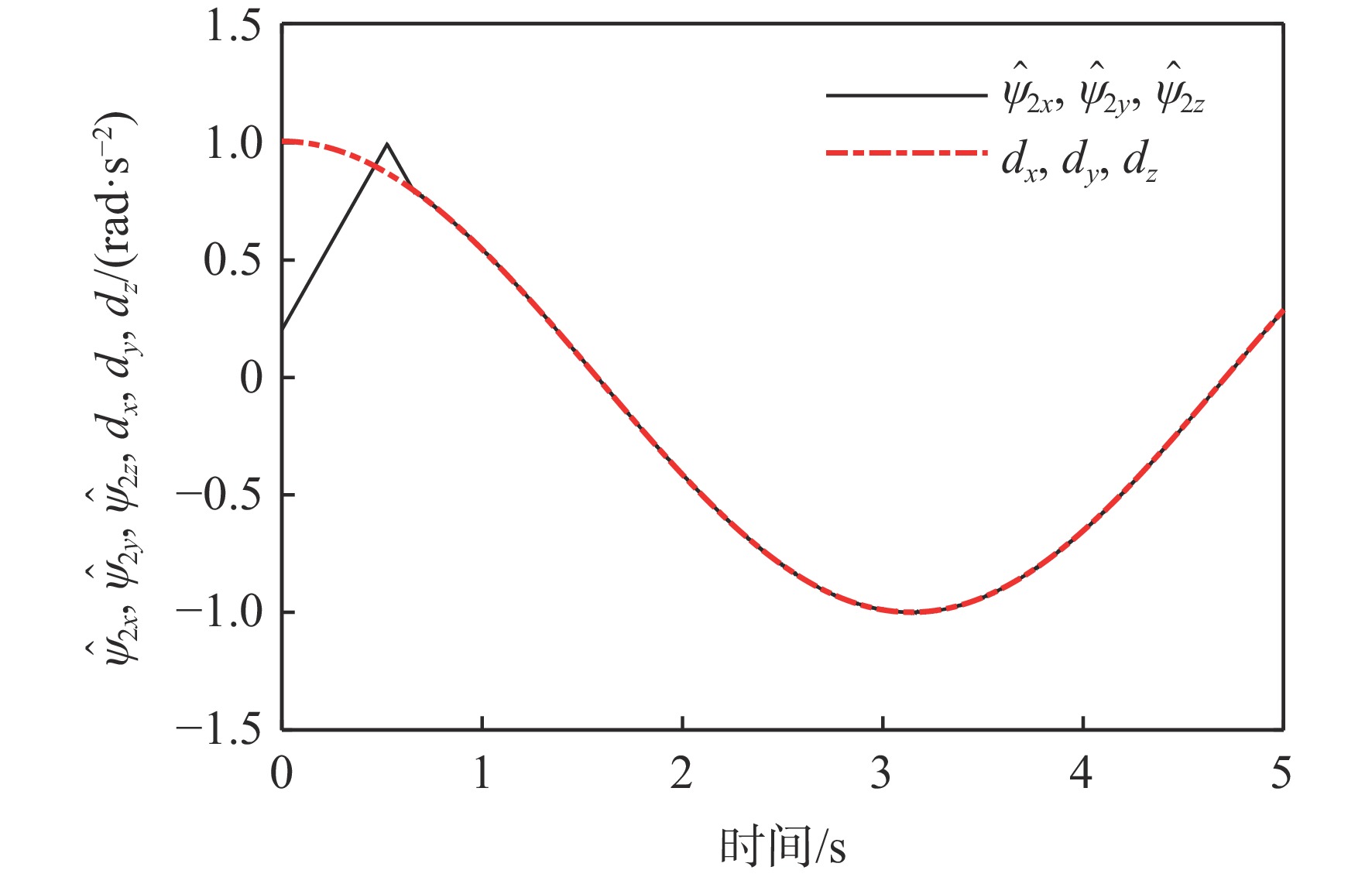
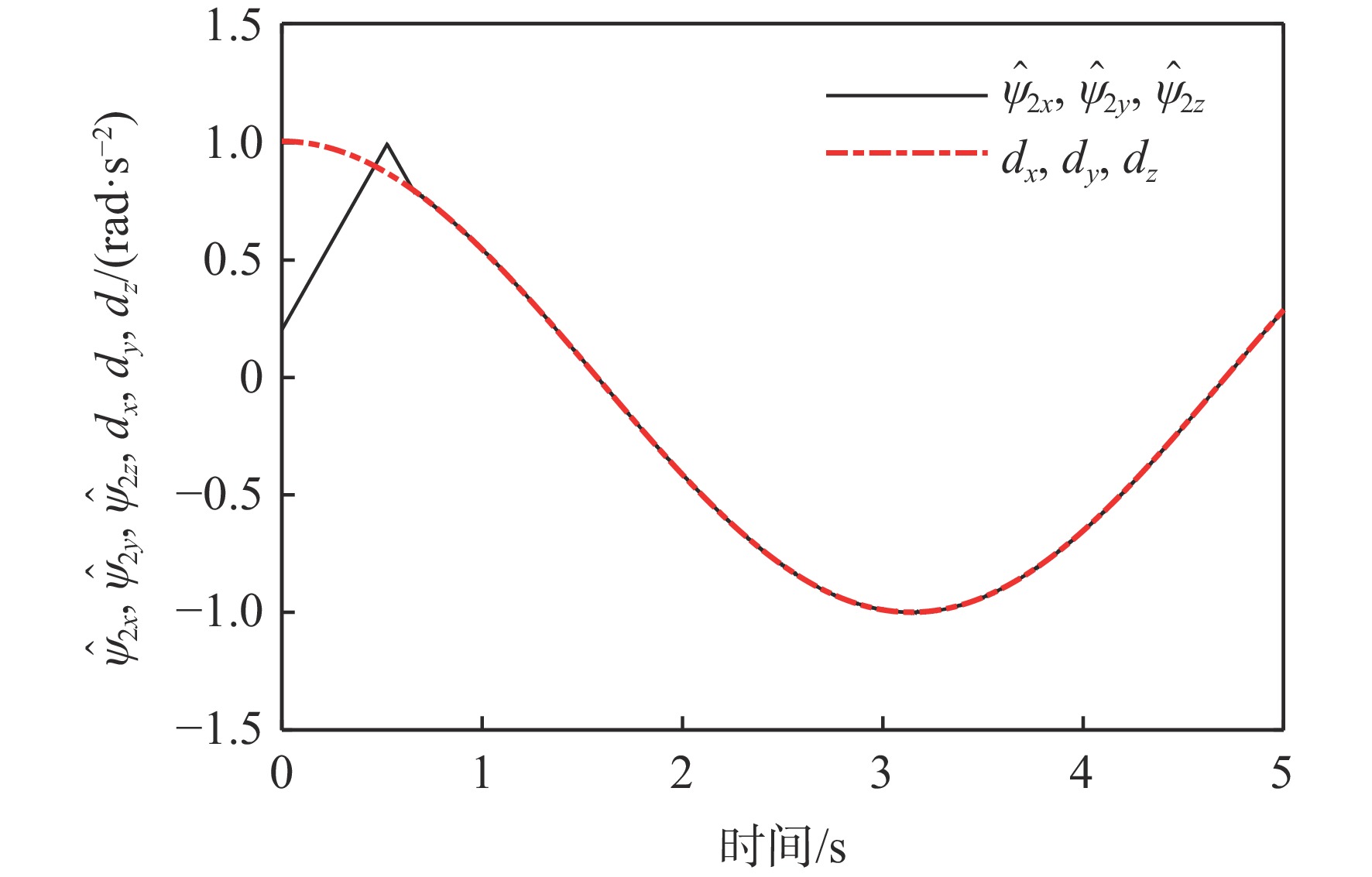
图 7 外部扰动与干扰观测器估计值
Figure 7. External disturbance and interference in observer estimate
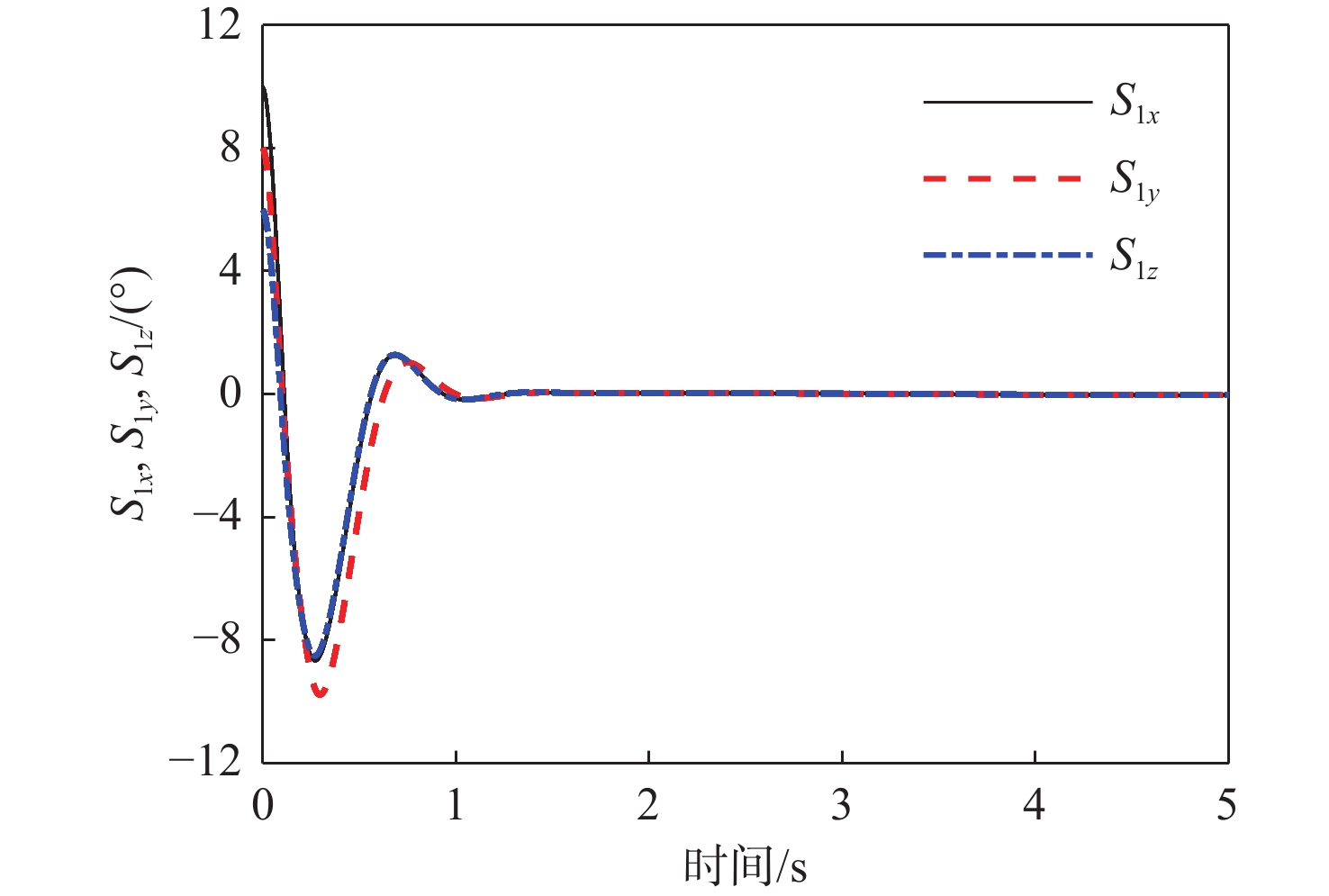
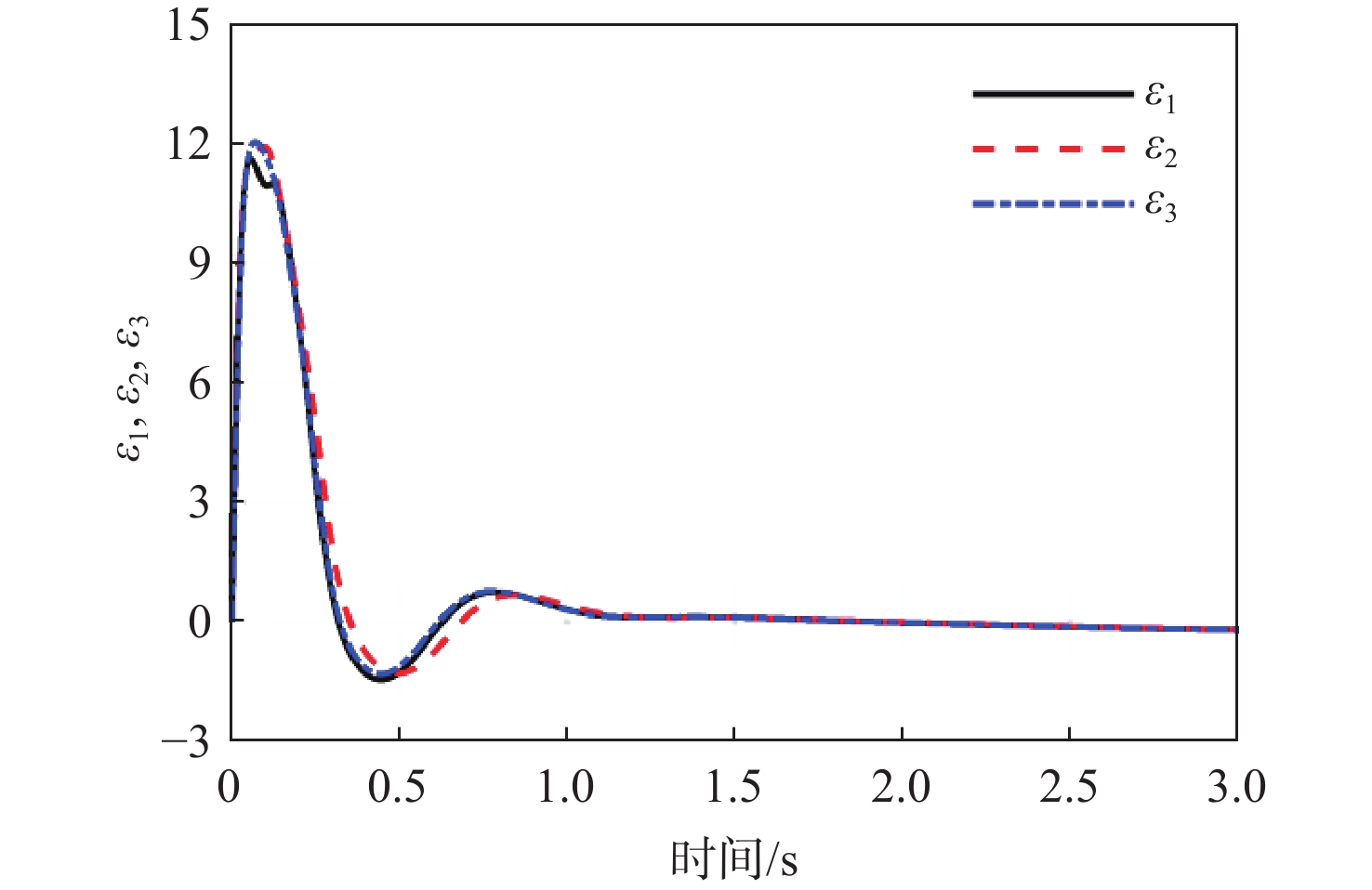
图 8 内外扰动下的姿态跟踪误差
Figure 8. Attitude tracking error under internal and external disturbances
-
[1] 乔伟根. 干扰条件下四旋翼无人机的轨迹跟踪控制[D]. 太原: 中北大学, 2022.QIAO W G. Trajectory tracking control of quad-rotor under interference conditions[D]. Taiyuan: North University of China, 2022(in Chinese). [2] 李鸿一, 王琰, 姚得银, 等. 基于事件触发机制的多四旋翼无人机鲁棒自适应滑模姿态控制[J]. 中国科学: 信息科学, 2023, 53(1): 66-80.LI H Y, WANG Y, YAO D Y, et al. Robust adaptive sliding mode attitude control of MQUAVs based on event-triggered mechanism[J]. Scientia Sinica(Informationis), 2023, 53(1): 66-80(in Chinese). [3] 王栋, 鲜斌. 倾转式三旋翼无人机的自适应鲁棒容错控制[J]. 控制理论与应用, 2020, 37(4): 784-792.WANG D, XIAN B. Adaptive robust fault tolerant control of the tilt tri-rotor unmanned aerial vehicle[J]. Control Theory & Applications, 2020, 37(4): 784-792(in Chinese). [4] 薛晶勇, 王斌锐. 指数型时变增益反步滑模四旋翼姿态控制[J]. 控制工程, 2022, 29(5): 935-943.XUE J Y, WANG B R. Backstepping sliding mode attitude controller of exponential varying-time gain for quadrotor[J]. Control Engineering of China, 2022, 29(5): 935-943(in Chinese). [5] 刘晨阳, 吴大伟, 郭一泽, 等. 不确定强耦合下四旋翼姿态鲁棒自适应控制[J]. 航空学报, 2023, 44(增刊1): 727645.LIU C Y, WU D W, GUO Y Z, et al. Robust adaptive control of four-rotor attitude under uncertain strong coupling[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(Sup 1): 727645(in Chinese). [6] SWAROOP D, HEDRICK J K, YIP P P, et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2000, 45(10): 1893-1899. doi: 10.1109/TAC.2000.880994 [7] NAI Y Q, YANG Q Y, ZHANG Z Q. Adaptive neural output feedback compensation control for intermittent actuator faults using command-filtered backstepping[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(9): 3497-3511. doi: 10.1109/TNNLS.2019.2944897 [8] 赵海斌, 李伶, 孙胜. 基于模糊控制的有限时间收敛制导律[J]. 航天控制, 2014, 32(3): 33-37.ZHAO H B, LI L, SUN S. Guidance law with finite time convergence based on fuzzy logic[J]. Aerospace Control, 2014, 32(3): 33-37(in Chinese). [9] 张远, 黄万伟, 路坤锋, 等. 高超声速变外形飞行器建模与有限时间控制[J]. 北京航空航天大学学报, 2022, 48(10): 1979-1993.ZHANG Y, HUANG W W, LU K F, et al. Modeling and finite-time control for hypersonic morphing flight vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1979-1993(in Chinese). [10] POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE transactions on Automatic Control, 2011, 57(8): 2106-2110. [11] 侯书超, 赵林. 基于命令滤波反步法的机械臂系统固定时间自适应跟踪控[J]. 自动化与仪表, 2022, 37(7): 35-42.HOU S C, ZHAO L. Fixed-time adaptive tracking control of manipulator system based on command filtering backstepping method[J]. Automation& Instrumentation, 2022, 37(7): 35-42(in Chinese). [12] 夏笠城, 王姝旸, 张晶, 等. 基于双频扩张状态观测器的无人机抗扰控制[J]. 北京航空航天大学学报, 2023, 49(5): 1201-1208.XIA L C, WANG S Y, ZHANG J, et al. Bi-bandwidth extended state observer based disturbance rejection control method and its application on UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(5): 1201-1208(in Chinese). [13] 鄢化彪, 徐炜宾, 黄绿娥. 基于改进ADRC的四旋翼姿态控制器设计[J]. 北京航空航天大学学报, 2023, 49(12): 3283-3292.YAN H B, XU W B, HUANG L E. Design of quadrotor attitude controller based on improved ADRC[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(12): 3283-3292(in Chinese). [14] ZHANG H C, SONG A G, LI H J, et al. Adaptive finite-time control scheme for teleoperation with time-varying delay and uncertainties[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(3): 1552-1566. doi: 10.1109/TSMC.2020.3032295 [15] 董泽洪, 李颖晖, 吕茂隆, 等. 迎角受限的高超声速飞行器固定时间鲁棒控制[J]. 宇航学报, 2022, 43(12): 1708-1721.DONG Z H, LI Y H, LV M L, et al. Fixed-time robust control for hypersonic flight vehicle with constrained angle of attack[J]. Journal of Astronautics, 2022, 43(12): 1708-1721(in Chinese). [16] SHARMA M, KAR I. Finite time disturbance observer based geometric control of quadrotors[J]. IFAC-PapersOnLine, 2020, 53(1): 295-300. doi: 10.1016/j.ifacol.2020.06.050 [17] YAN K, WU Q X. Adaptive tracking flight control for unmanned autonomous helicopter with full state constraints and actuator faults[J]. ISA transactions, 2022, 128: 32-46. [18] XU L X, MA H J, GUO D, et al. Backstepping sliding-mode and cascade active disturbance rejection control for a quadrotor UAV[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(6): 2743-2753. doi: 10.1109/TMECH.2020.2990582 [19] ZHOU X, GAO C, LI Z G, et al. Observer-based adaptive fuzzy finite-time prescribed performance tracking control for strict-feedback systems with input dead-zone and saturation[J]. Nonlinear Dynamics, 2021, 103(2): 1645-1661. doi: 10.1007/s11071-020-06190-5 [20] CHEN M, SHI P, LIM C C. Adaptive neural fault-tolerant control of a 3-DOF model helicopter system[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2016, 46(2): 260-270. doi: 10.1109/TSMC.2015.2426140 [21] POLYCARPOU M M. Stable adaptive neural control scheme for nonlinear systems[J]. IEEE Transactions on Automatic Control, 1996, 41(3): 447-451. doi: 10.1109/9.486648 [22] QIAN C J, LIN W. Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization[J]. Systems & Control Letters, 2001, 42(3): 185-200. [23] WANG H Q, CHEN B, LIN C. Adaptive neural tracking control for a class of stochastic nonlinear systems[J]. International Journal of Robust and Nonlinear Control, 2014, 24(7): 1262-1280. doi: 10.1002/rnc.2943 [24] ZHU Z, XIA Y Q, FU M Y. Attitude stabilization of rigid spacecraft with finite-time convergence[J]. International Journal of Robust and Nonlinear Control, 2011, 21(6): 686-702. doi: 10.1002/rnc.1624 [25] WANG H Q, LIU P X, ZHAO X D, et al. Adaptive fuzzy finite-time control of nonlinear systems with actuator faults[J]. IEEE Transactions on Cybernetics, 2020, 50(5): 1786-1797. doi: 10.1109/TCYB.2019.2902868 [26] LIU S W, WANG H Q, LI T S. Fixed-time command-filtered composite adaptive neural fault-tolerant control for strict-feedback nonlinear systems[J]. ISA transactions, 2024, 145: 87-103. doi: 10.1016/j.isatra.2023.11.037 [27] CUI G Z, YANG W, YU J P, et al. Fixed-time prescribed performance adaptive trajectory tracking control for a QUAV[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 69(2): 494-498. [28] 崔正阳, 王勇. 无人机固定时间路径跟踪容错制导控制[J]. 北京航空航天大学学报, 2021, 47(8): 1619-1627.CUI Z Y, WANG Y. Fault-tolerant fixed-time path following guidance control of UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1619-1627(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 327
- HTML全文浏览量: 132
- PDF下载量: 15
- 被引次数: 0
