



Fault diagnosis method for hydraulic robots based on digital twin and Transformer-LSTM-XGBoost
-
摘要:
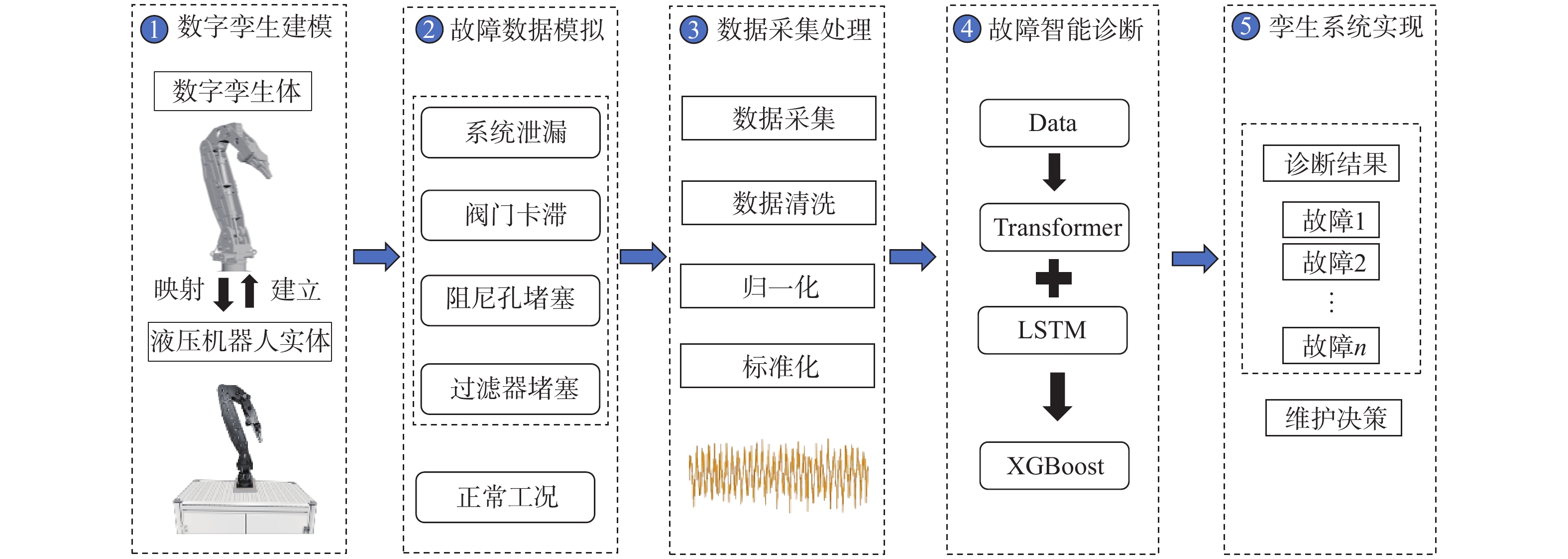
随着液压机器人的应用范围日益广泛,其健康诊断与维护需求也愈发迫切。通过将数字孪生与深度学习技术相结合,提出一种基于Transformer、长短期记忆网络(LSTM)与极端梯度提升(XGBoost)算法相融合的液压机器人智能故障诊断方法。提出基于数字孪生技术的液压机器人故障诊断架构与方案;建立涵盖三维模型与属性模型且具备虚实同步能力的液压机器人数字孪生体,并研究了提升孪生模型精度的校准方法。针对常见的液压系统泄漏、阀门卡滞、阻尼孔堵塞、过滤器堵塞4种典型故障,在所建数字孪生体上进行故障机理分析与演化过程模拟,构建覆盖正常工况及多类故障工况的高质量数据集,用于支撑数据驱动建模与智能诊断。提出融合Transformer与LSTM的深度特征提取模型,以捕获多维特征间的全局依赖关系与时序动态特征,并引入XGBoost分类器实现多故障模式识别。实验验证结果表明:所提方法在多种液压系统故障诊断中可获得96.6%的诊断准确率,在不同噪声扰动条件下仍保持稳定的诊断性能,所提方法具有良好的鲁棒性与泛化能力,可为液压机器人故障诊断与维护提供有效的技术支撑。
Abstract:Hydraulic robots are increasingly used in industrial systems, which raises the need for reliable health diagnosis and maintenance under complex operating conditions. An intelligent fault diagnosis method was developed by integrating digital twin technology with deep learning and combining a Transformer, a long short-term memory networks (LSTM), and extreme gradient boosting (XGBoost). A diagnosis architecture based on digital twins was built, and cyber-physical synchronization was made possible by a digital twin with an attribute model and a three-dimensional model. Calibration improved twin accuracy and virtual-physical consistency. Fault mechanism analysis and fault evolution simulation were conducted for four typical hydraulic system faults: leakage, valve sticking, damping orifice blockage, and filter blockage. The simulations generated a dataset covering normal and fault conditions for data-driven modeling and diagnosis. A Transformer-LSTM feature extractor captured global dependencies and temporal dynamics in multi-dimensional time-series data, and XGBoost performed multi-fault classification. The experimental verification results show that the proposed method demonstrate steady performance under various noise disturbances and 96.6% diagnostic accuracy across many problems, suggesting high resilience and generalization and supporting hydraulic robot fault detection and maintenance in industrial applications.
-
Key words:
- digital twin /
- hydraulic robot /
- fault diagnosis /
- deep learning /
- machine learning
-
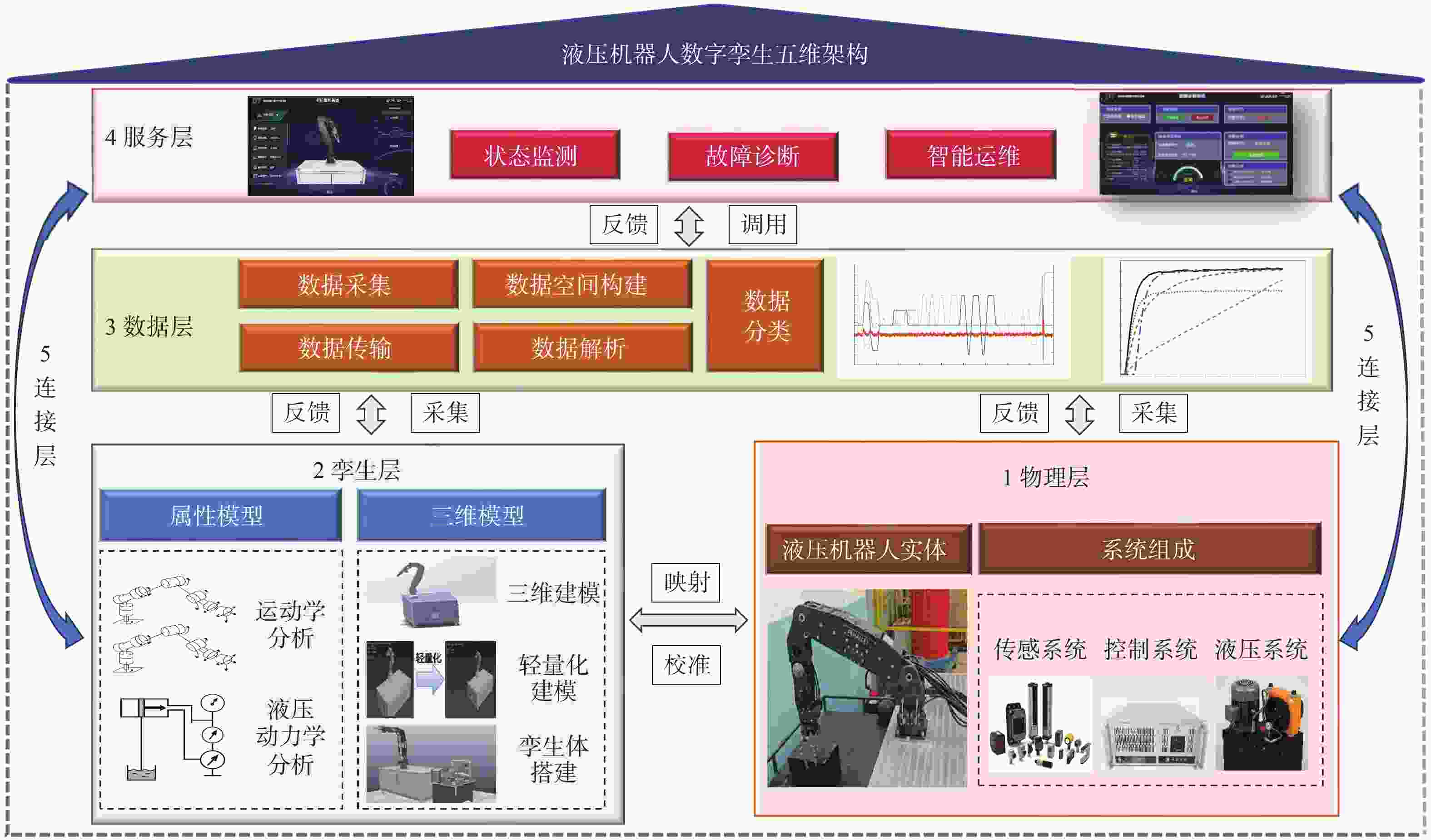
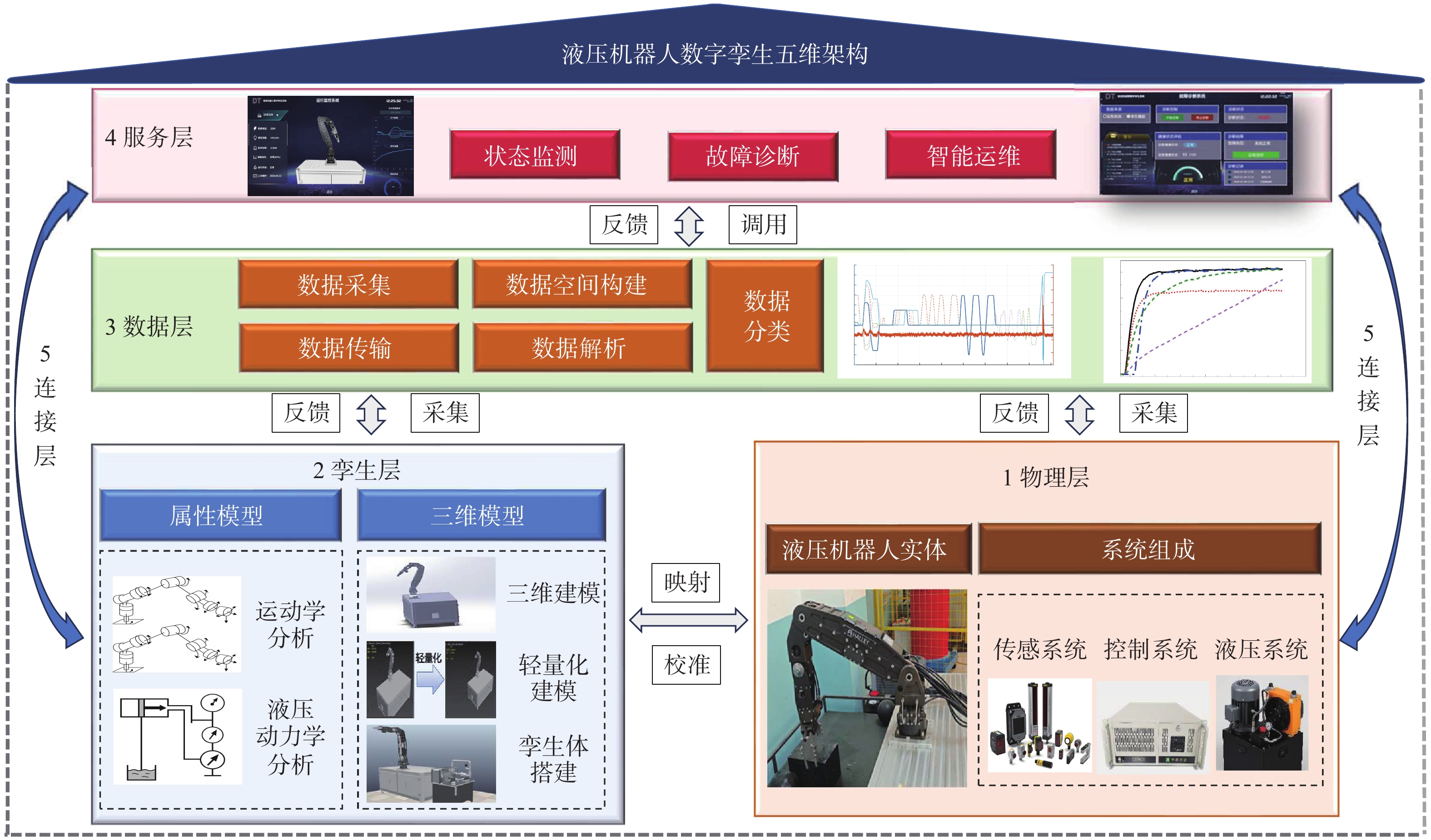
图 1 液压机器人数字孪生五维架构
Figure 1. Five-dimensional digital twin architecture of hydraulic robot
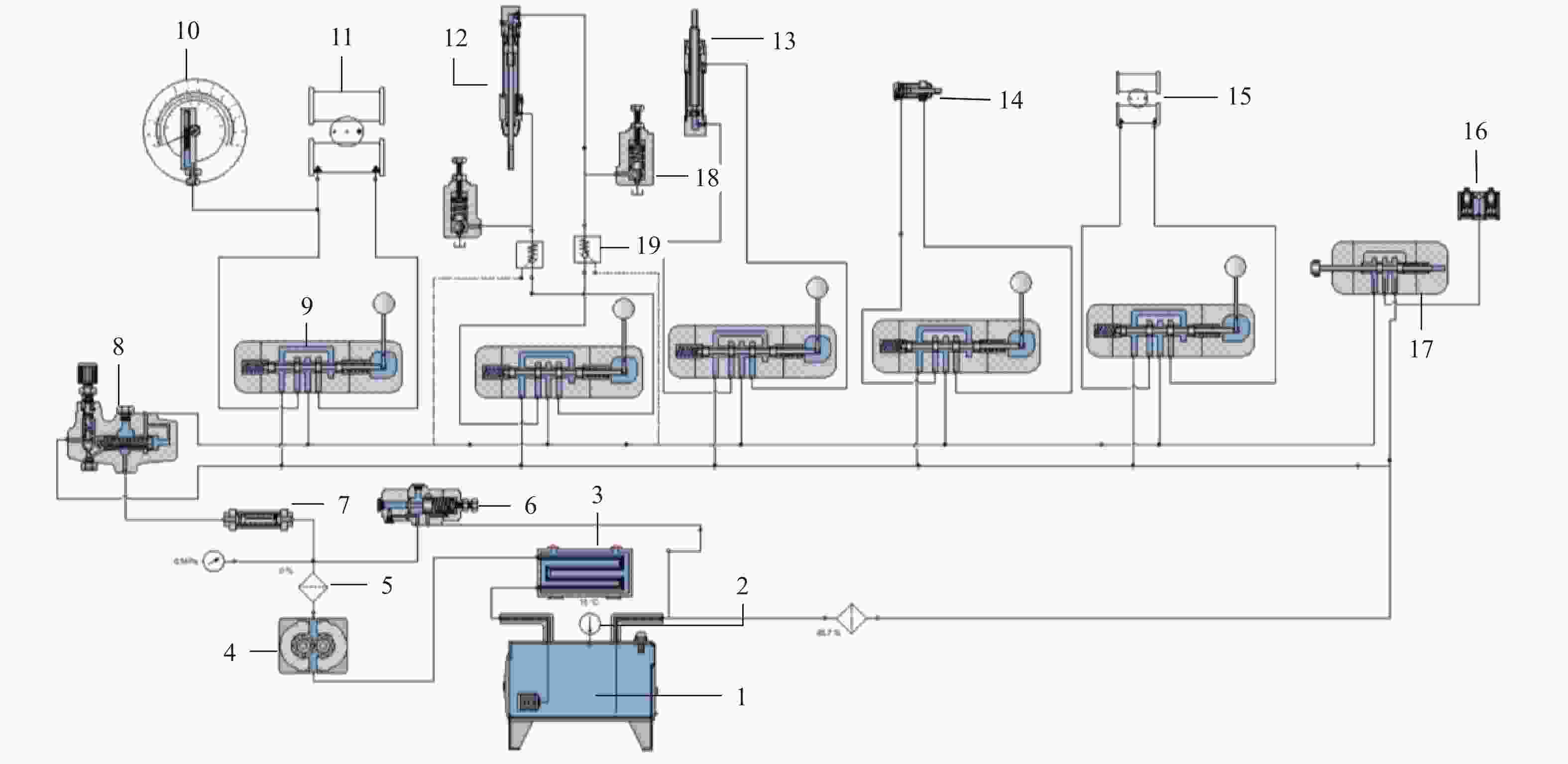
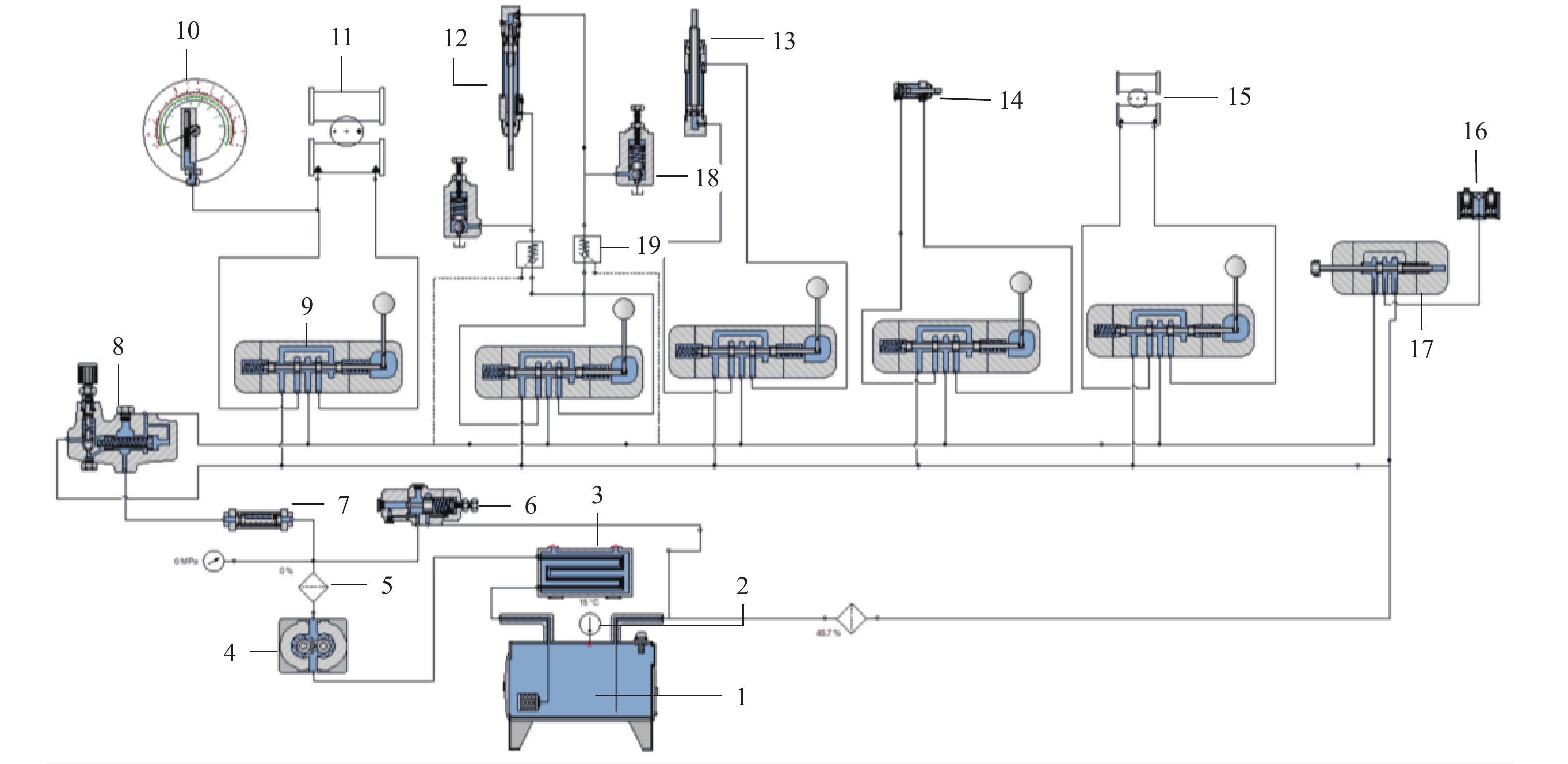
图 9 液压驱动系统的模型
1.液压油箱;2.油箱温度计;3.风冷式冷却器;4.油泵;5.过滤器;6,8,18.溢流阀;7.流量计;9,17.换向阀;10.压力表;11,15.摆动缸;12,13,14,16.直线缸;19.止回阀。
Figure 9. Model of hydraulic drive system
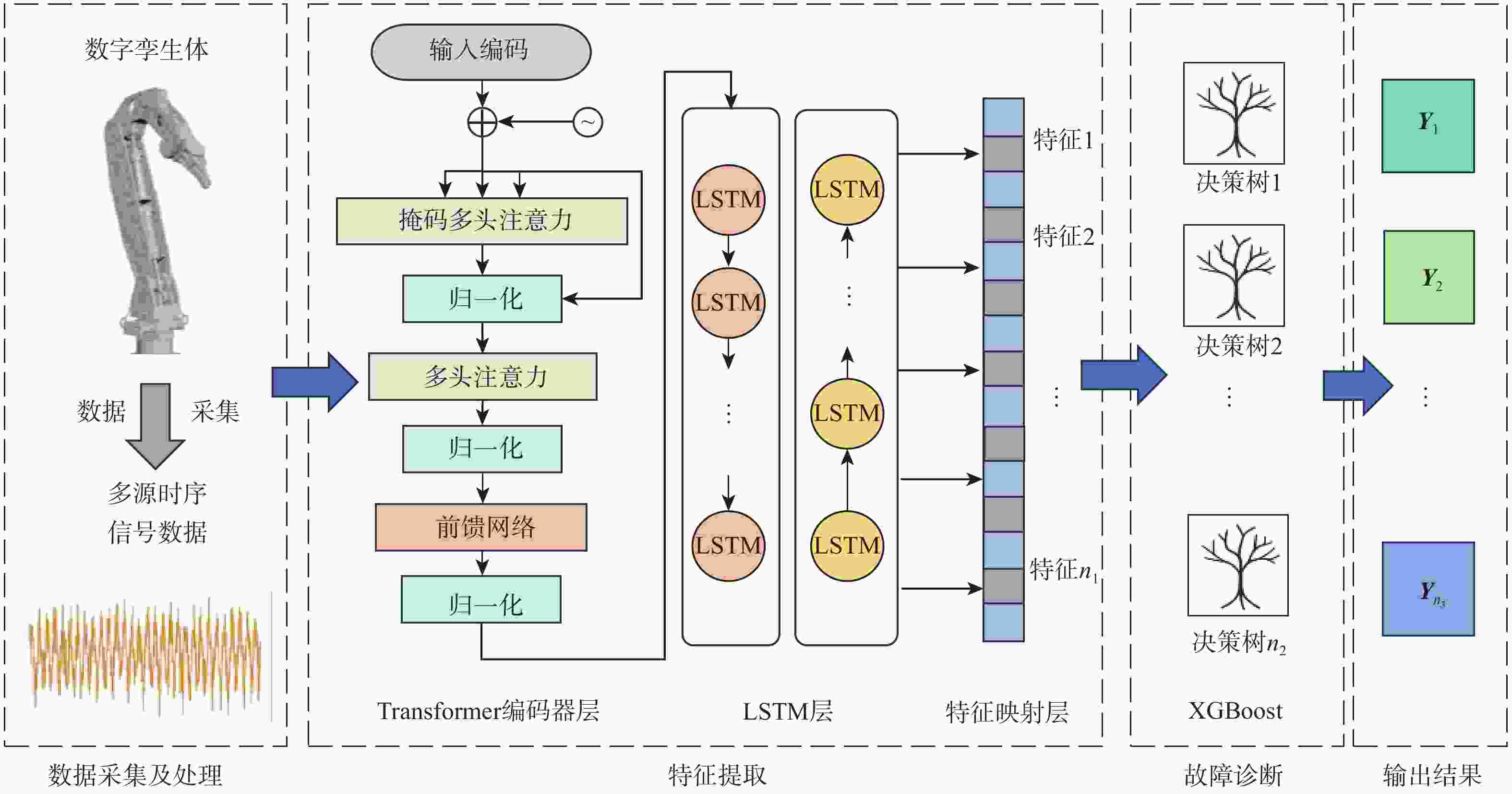
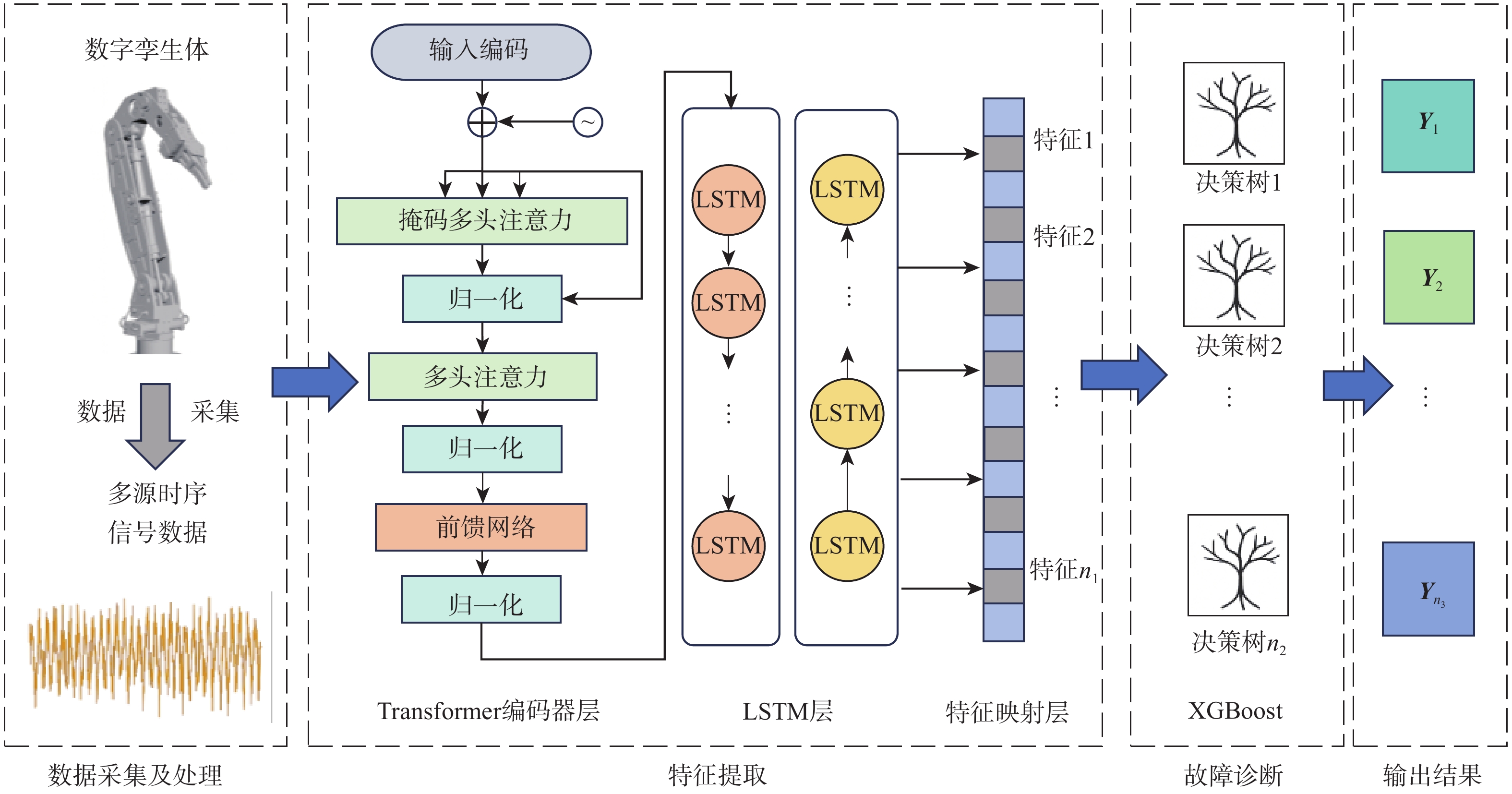
图 12 Transformer-LSTM-XGBoost的液压机器人故障诊断方法框架
Figure 12. Transformer-LSTM-XGBoost-based framework for hydraulic robot fault diagnosis method
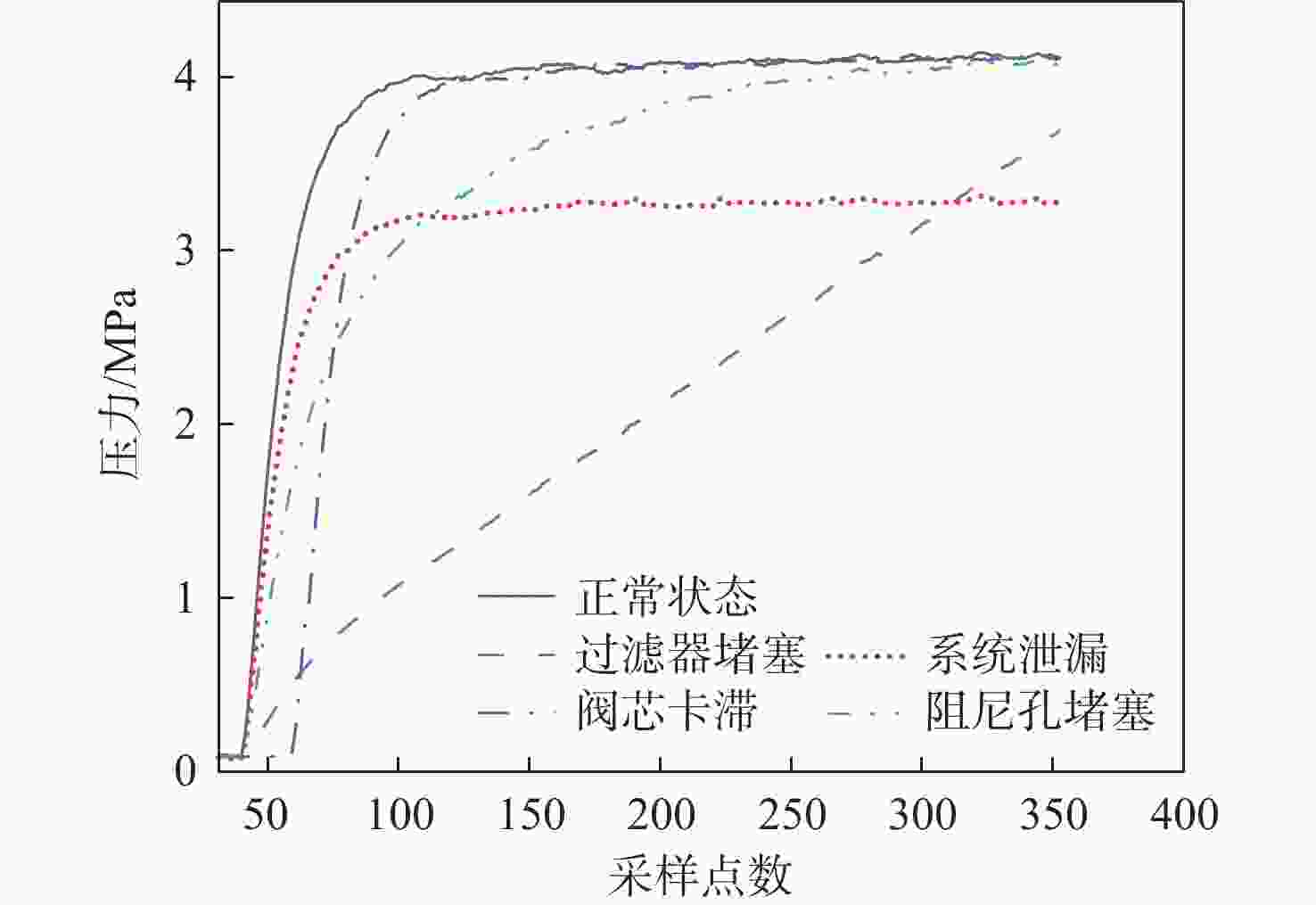
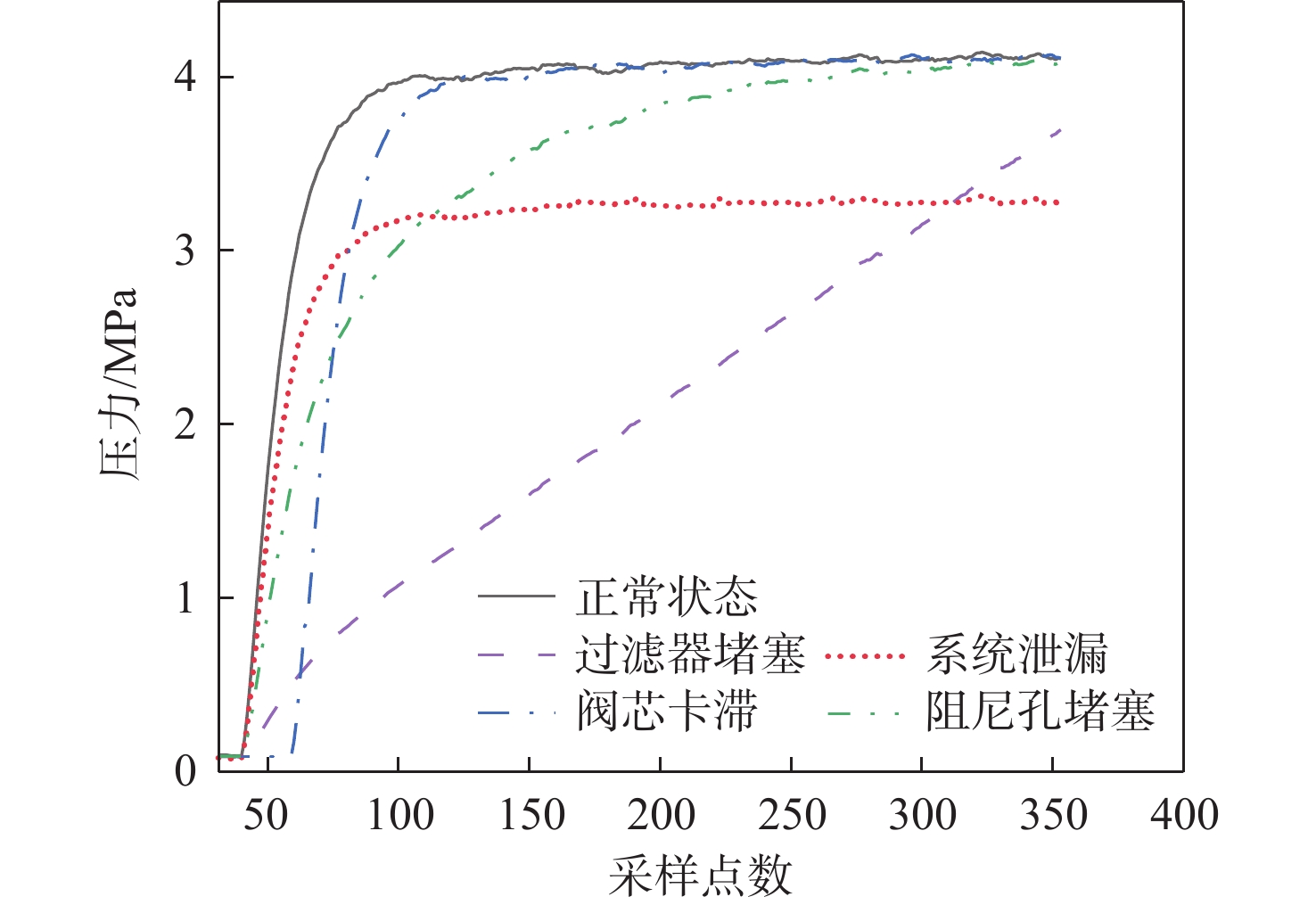
图 13 不同故障类型下压力信号的变化趋势
Figure 13. Pressure signal variations under different fault types
表 1 液压机器人的基本参数
Table 1. Basic parameters of hydraulic robot
参数 数值 质量/kg 40 水平伸展范围/mm 1330 向上伸展范围/mm 1640 向下伸展范围/mm 293 抓举质量/kg 30 肩部转向范围/(°) 180 肩部俯仰范围/(°) 110 肘部俯仰范围/(°) 100 腕部俯仰范围/(°) 100 腕部回转范围/(°) 310 钳口张开范围/mm 100  下载: 导出CSV
下载: 导出CSV
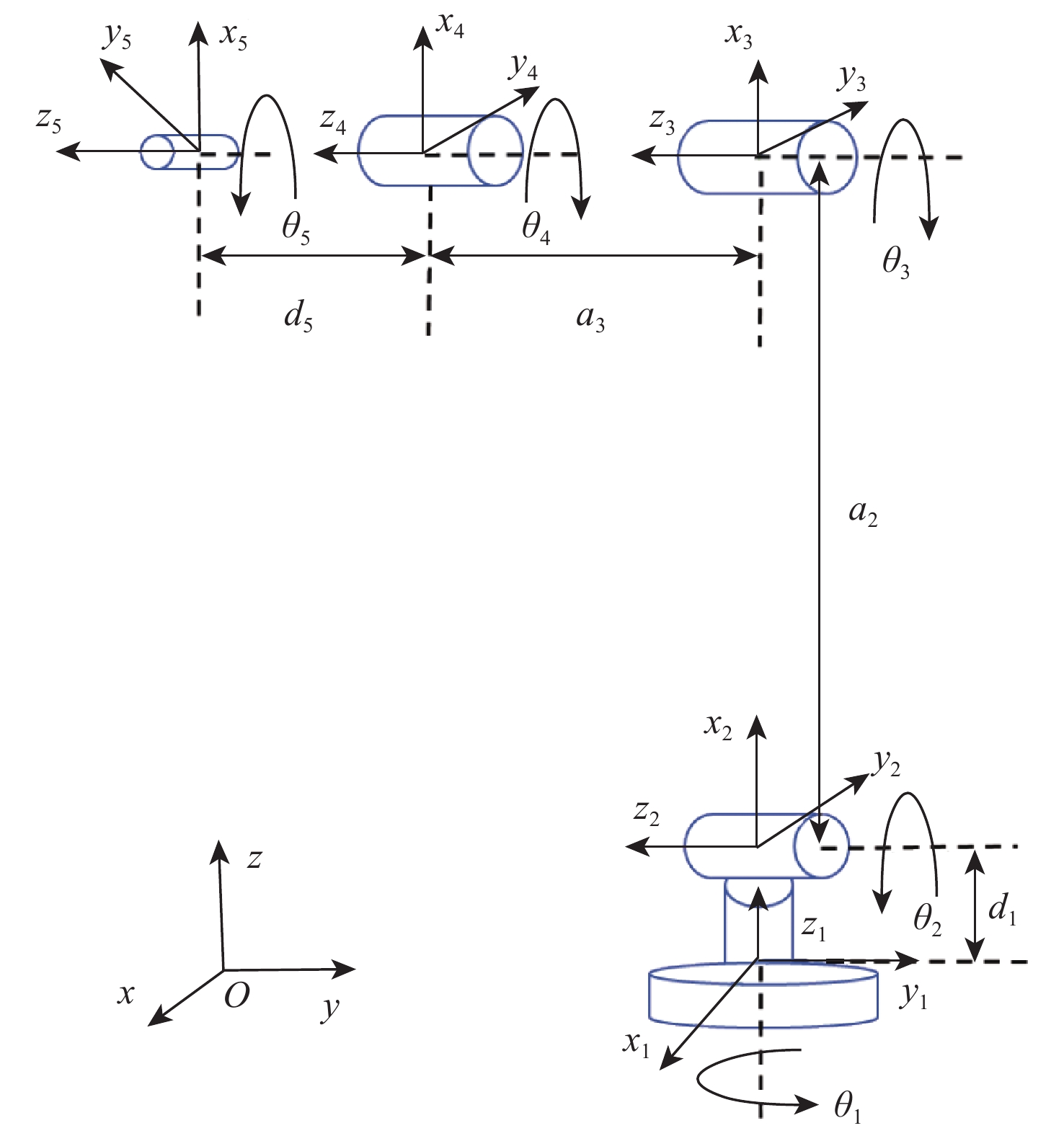
表 2 液压机器人改进D-H参数表
Table 2. Modified D-H parameters of hydraulic robot
连杆$ i $ $ {\alpha }_{i-1} $/(°) $ {{a}}_{i-1} $/mm $ {d}_{i} $/mm $ {\theta }_{i} $/(°) 1 0 0 286.923 $ {\theta }_{1} $ 2 −90 0 0 $ {\theta }_{2} $ 3 0 646.901 0 $ {\theta }_{3} $ 4 0 244.866 0 $ {\theta }_{4} $ 5 −90 0 461.049 $ {\theta }_{5} $ 注:$ {\alpha }_{i-1} $表示绕着$ {x}_{i-1} $轴,从$ {{\textit{z}}}_{i-1} $旋转到$ {{\textit{z}}}_{i} $的角度。
下载: 导出CSV
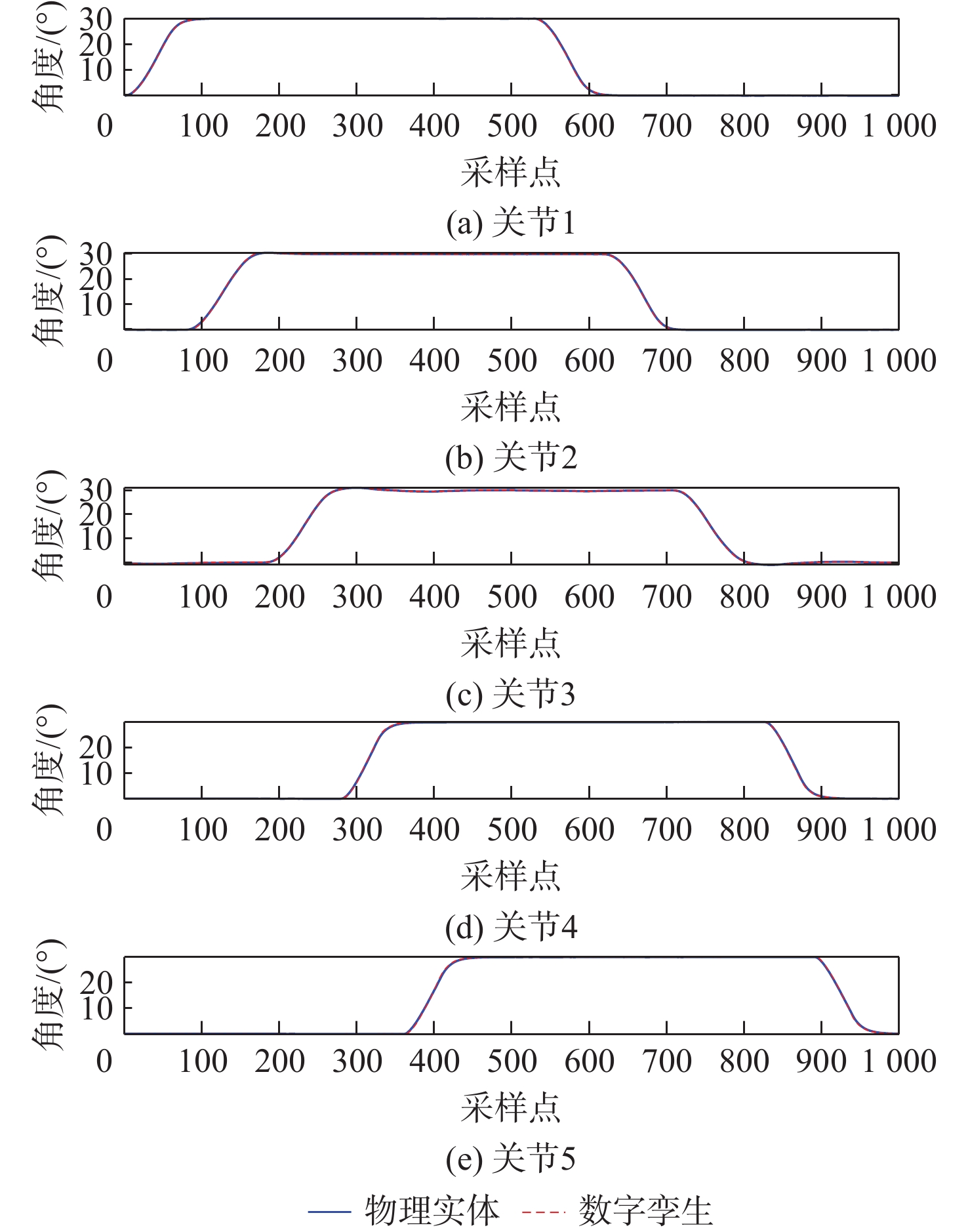
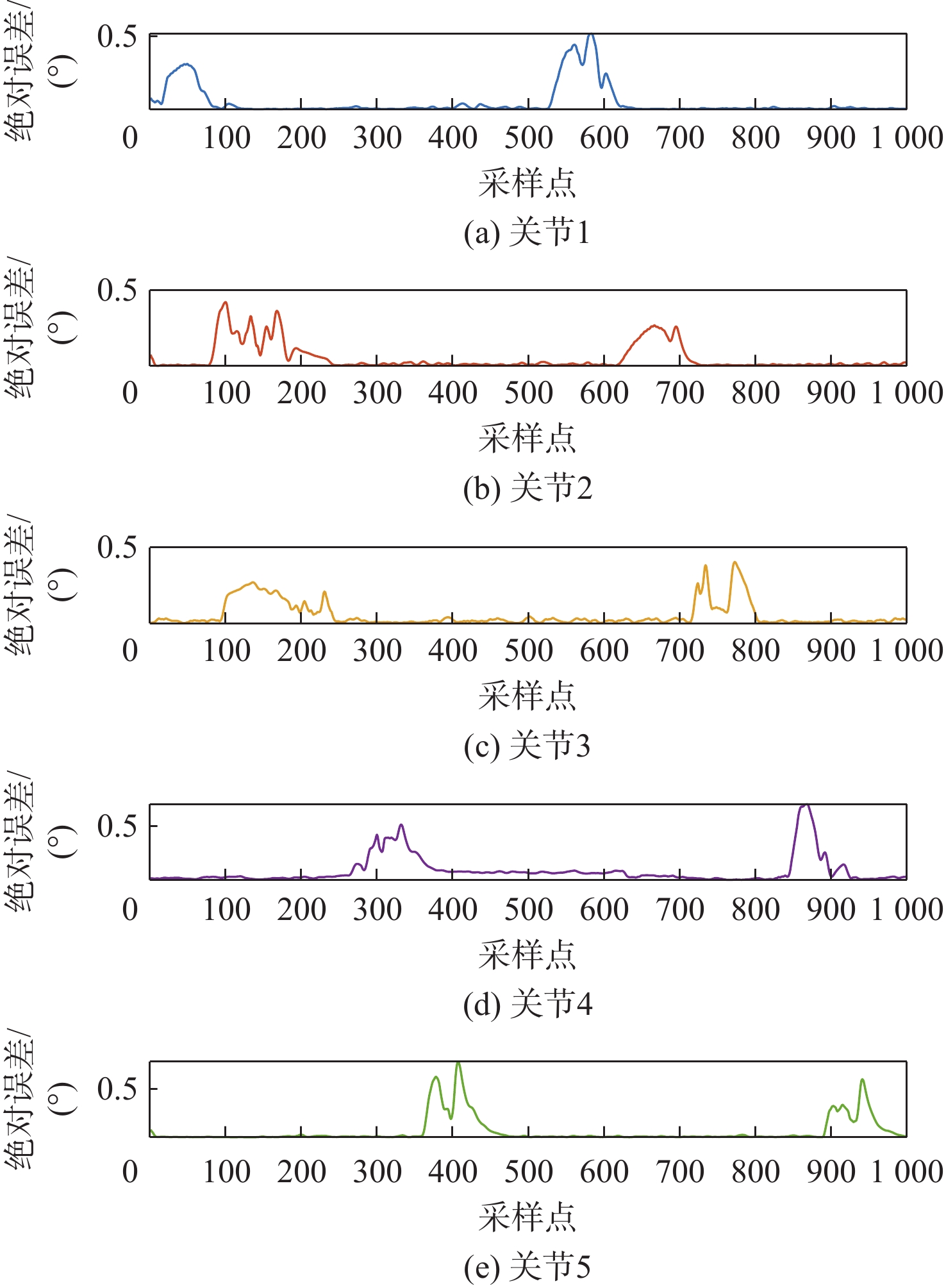
表 3 数字孪生模型精度评价结果
Table 3. Accuracy evaluation results of digital twin model
MAE/(°) RMSE/(°) BIAS/(°) R²/% 0.26 0.32 −0.16 98.3
下载: 导出CSV
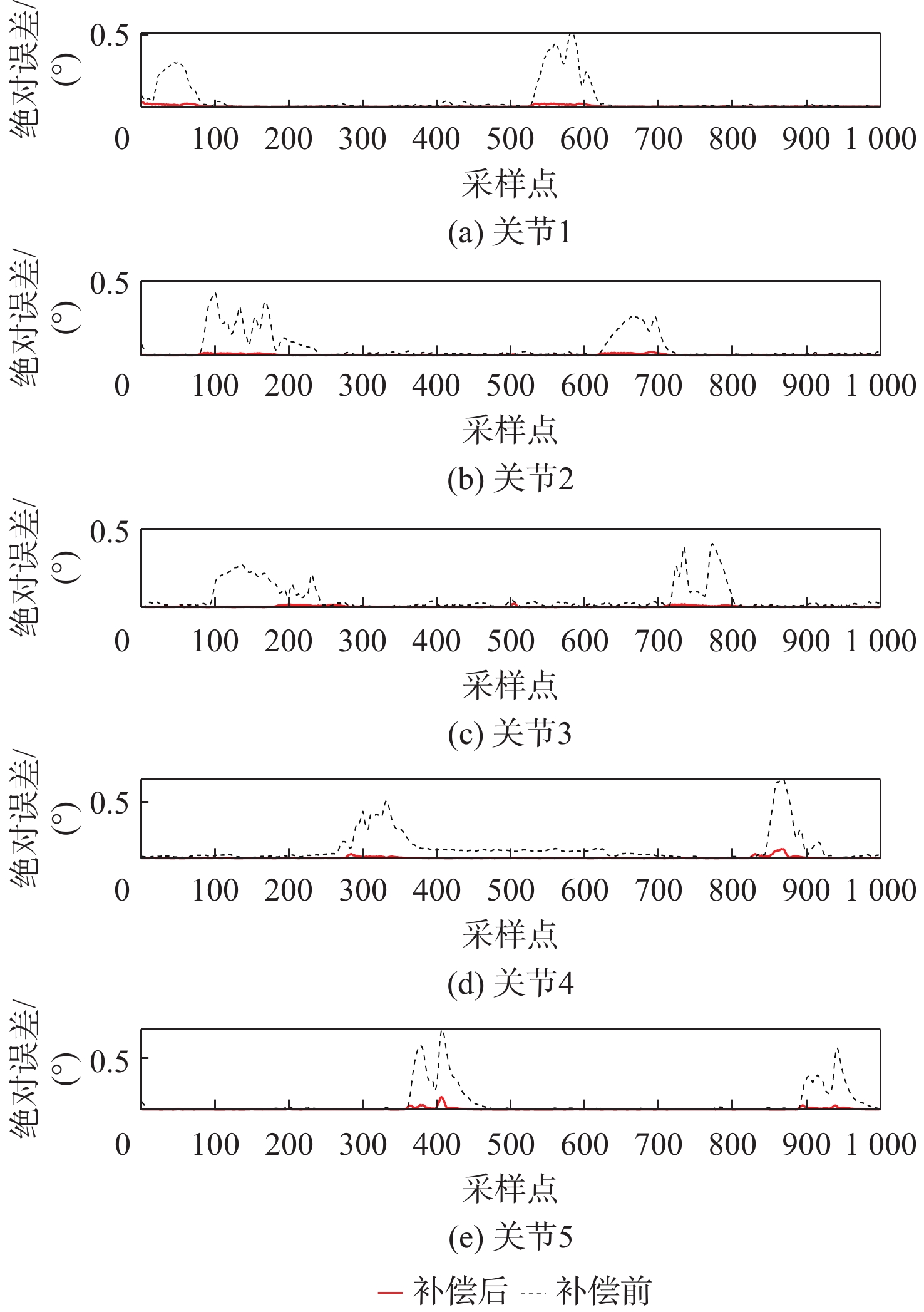
表 4 补偿后的数字孪生模型精度评价结果
Table 4. Accuracy evaluation results of compensated digital twin model
MAE/(°) RMSE/(°) BIAS/(°) R2/% 0.059 0.127 0.07 99.9
下载: 导出CSV
表 5 样本分布
Table 5. Sample distribution
故障类别 类别标签 样本数/条 滤油器堵塞 1 392 阻尼孔堵塞 2 392 阀门卡滞 3 392 系统泄漏 4 392 正常工况 5 779
下载: 导出CSV
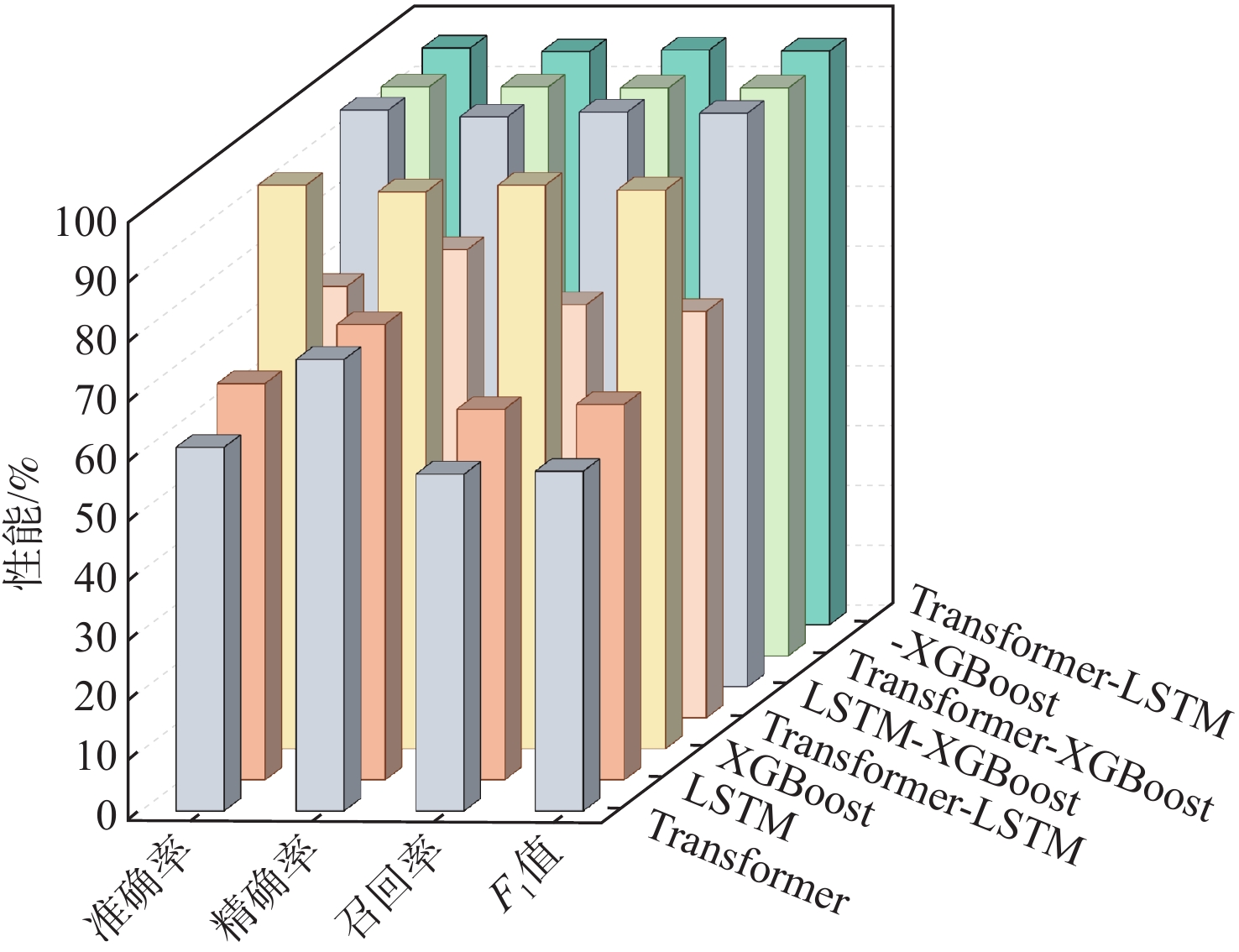
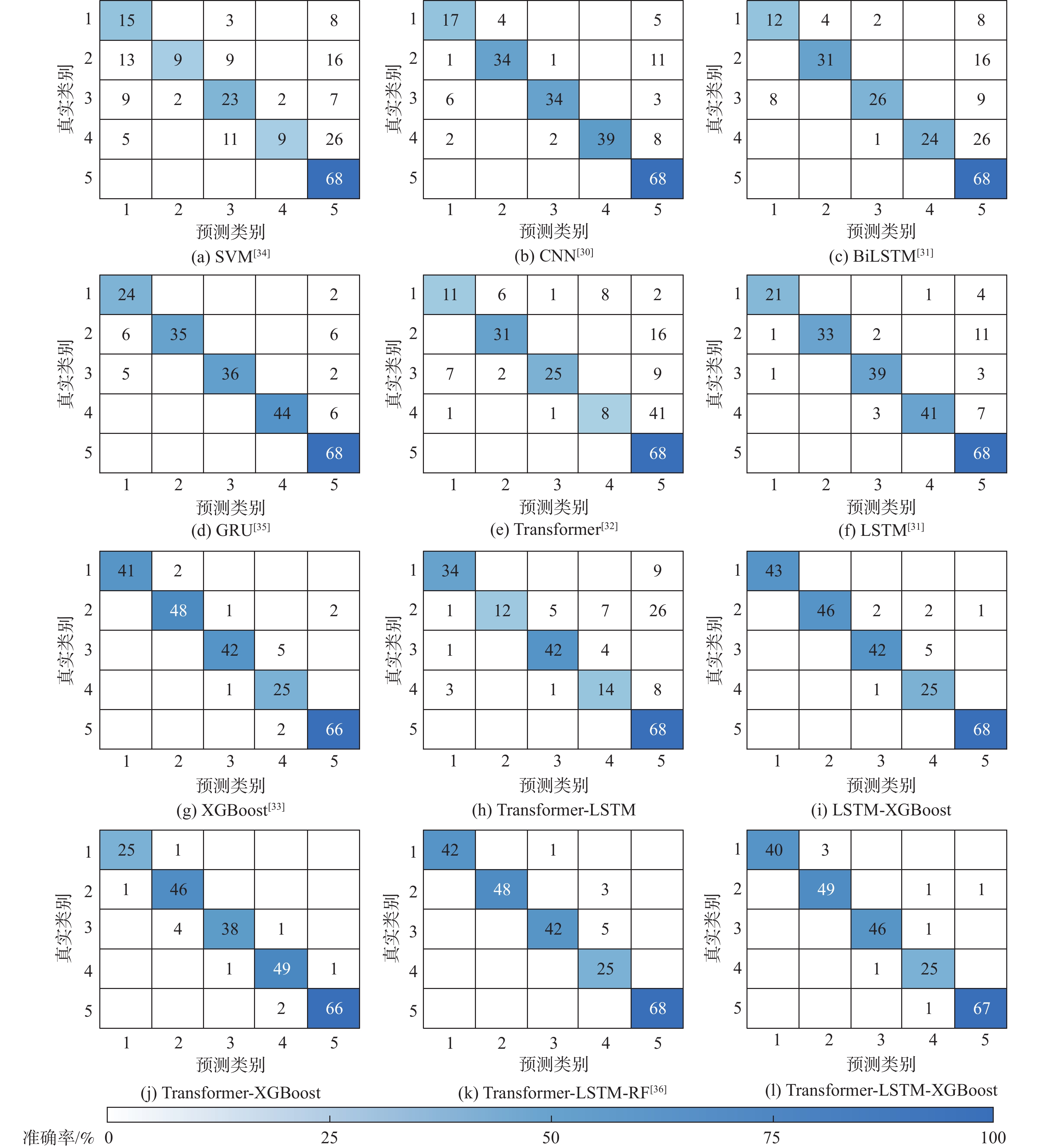
表 6 多模型性能指标对比
Table 6. Multi-Model performance comparison chart
模型 准确率/% 精确率/% 召回率/% F1值/% SVM[34] 52.8 60.8 49.6 45.3 CNN[30] 81.7 83.6 78.6 80.0 BiLSTM[31] 68.0 77.7 63.4 66.2 GRU[35] 62.1 70.6 56.7 58.1 Transformer[32] 60.9 75.6 56.4 56.9 LSTM[31] 66.4 76.3 62.1 62.9 XGBoost[33] 94.4 93.3 94.4 93.6 Transformer-LSTM 72.3 78.4 69.2 68.1 LSTM-XGBoost 96.6 95.5 96.3 96.1 Transformer-XGBoost 95.3 95.3 95.1 95.1 Transformer-LSTM-RF[36] 96.2 94.8 96.2 95.1 Transformer-LSTM-XGBoost 96.6 96.0 96.3 96.1
下载: 导出CSV
表 7 不同噪声强度下的模型性能对比
Table 7. Performance comparison under different noise intensities
噪声强度 准确率/% 精确率/% 召回率/% F1值/% 无额外噪声 96.6 96.0 96.3 96.1 低强度噪声 95.5 95.1 95.3 95.2 中强度噪声 93.1 93.7 94.0 93.8 高强度噪声 89.8 91.0 89.5 88.8
下载: 导出CSV
-
[1] DI LALLO A, YU S Y, SLIGHTAM J E, et al. Untethered fluidic engine for high-force soft wearable robots[J]. Advanced Intelligent Systems, 2024, 6(11): 2400171. [2] 朱明君, 张鹏飞, 黄德民, 等. 液压系统的故障诊断与健康管理研究综述[J]. 润滑油, 2023, 38(3): 7-12.ZHU M J, ZHANG P F, HUANG D M, et al. A research review of fault diagnosis and health management of hydraulic systems[J]. Lubricating Oil, 2023, 38(3): 7-12(in Chinese). [3] 陈斌, 王占林, 裘丽华. 机载液压系统的主要发展趋势[J]. 航空学报, 1998, 19(1): 2-7.CHEN B, WANG Z L, QIU L H. Main developmental trend of aircraft hydraulic systems[J]. Acta Aeronautica et Astronautica Sinica, 1998, 19(1): 2-7(in Chinese). [4] REN X, GUO Q, LI T S, et al. Fault detection and tolerant control with a variable-bandwidth extended state observer for electro-hydraulic servo systems with lumped disturbance and measurement noise[J]. ISA Transactions, 2025, 162: 287-300. [5] DAI J Y, TANG J, HUANG S Z, et al. Signal-based intelligent hydraulic fault diagnosis methods: review and prospects[J]. Chinese Journal of Mechanical Engineering, 2019, 32: 75. [6] PENG Z K, CHU F L. Application of the wavelet transform in machine condition monitoring and fault diagnostics: a review with bibliography[J]. Mechanical Systems and Signal Processing, 2004, 18(2): 199-221. [7] 周汝胜, 焦宗夏, 王少萍. 液压系统故障诊断技术的研究现状与发展趋势[J]. 机械工程学报, 2006, 42(9): 6-14.ZHOU R S, JIAO Z X, WANG S P. Current research and developing trends on fault diagnosis of hydraulic systems[J]. Chinese Journal of Mechanical Engineering, 2006, 42(9): 6-14(in Chinese). [8] 夏婷, 曹戈, 朱加升, 等. 工程机械故障诊断技术研究综述及展望[J]. 工程机械与维修, 2024(4): 6-9.XIA T, CAO G, ZHU J S, et al. Review and prospect of fault diagnosis technology for construction machinery[J]. Construction Machinery & Maintenance, 2024(4): 6-9(in Chinese). [9] PENG P, WANG J G. NOSCNN: a robust method for fault diagnosis of RV reducer[J]. Measurement, 2019, 138: 652-658. [10] 姜少飞, 邬天骥, 彭翔, 等. 基于XGBoost特征提取的数据驱动故障诊断方法[J]. 中国机械工程, 2020, 31(10): 1232-1239.JIANG S F, WU T J, PENG X, et al. Data driven fault diagnosis method based on XGBoost feature extraction[J]. China Mechanical Engineering, 2020, 31(10): 1232-1239(in Chinese). [11] 郑彪, 高丙朋, 程静. 基于DNN-CapsNet的液压泵故障程度诊断方法[J]. 液压与气动, 2023, 47(8): 41-49.ZHENG B, GAO B P, CHENG J. Fault degree diagnosis of hydraulic pump based on DNN-CapsNet[J]. Chinese Hydraulics & Pneumatics, 2023, 47(8): 41-49(in Chinese). [12] SUN J C, DING H, LI N, et al. Intelligent fault diagnosis of hydraulic system based on multiscale one-dimensional convolutional neural networks with multiattention mechanism[J]. Sensors, 2024, 24(22): 7267. [13] LIU Y J, LI W H, LIN S Y, et al. Hydraulic system fault diagnosis of the chain jacks based on multi-source data fusion[J]. Measurement, 2023, 217: 113116. [14] 袁亮. 基于数字孪生的机械臂抓取作业仿真与监控系统[D]. 上海: 东华大学, 2023: 5-15.YUAN L. Simulation and monitoring system for mechanical arm grasping operations based on digital twins[D]. Shanghai: Donghua University, 2023: 5-15(in Chinese). [15] TAO F, ANWER N, LIU A, et al. Digital twin towards smart manufacturing and industry 4.0[J]. Journal of Manufacturing Systems, 2021, 58: 1-2. [16] 蔡宝, 康亮, 顾鸿良. 工业机器人数字孪生系统研究[J]. 自动化与仪表, 2025, 40(8): 62-66.CAI B, KANG L, GU H L. Research on digital twin of industrial robots[J]. Automation & Instrumentation, 2025, 40(8): 62-66(in Chinese). [17] 丁珈, 周炜, 张永, 等. 数字孪生驱动的装备全寿命周期智能运维技术进展与展望[J]. 系统工程理论与实践, 2025, 45(6): 1828-1845.DING J, ZHOU W, ZHANG Y, et al. Digital twin-driven full lifecycle intelligent equipment maintenance: progress and prospects[J]. Systems Engineering—Theory & Practice, 2025, 45(6): 1828-1845(in Chinese). [18] LIU X R, DAVID I. AI simulation by digital twins: systematic survey, reference framework, and mapping to a standardized architecture[J]. Software and Systems Modeling, 2025: 1-26. [19] 李亚洁, 刘强, 李炜. 基于离心泵数字孪生流场云图的叶轮故障诊断方法与应用[J]. 北京航空航天大学学报, 2025, 51(1): 193-201.LI Y J, LIU Q, LI W. Impeller fault diagnosis method and application based on digital twin flow field contour of centrifugal pump[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(1): 193-201(in Chinese). [20] 李志祥, 唐宏宾, 王永胜, 等. 基于数字孪生的液压机械臂运动仿真与状态监控系统设计[J]. 计算机集成制造系统, 2025, 31(12): 4382-4391.LI Z X, TANG H B, WANG Y S, et al. Design of motion simulation and condition monitoring system for hydraulic manipulator based on digital twin[J]. Computer Integrated Manufacturing Systems, 2025, 31(12): 4382-4391(in Chinese). [21] 简正豪, 陈卓贤, 刘云鸿, 等. 基于数字孪生的液压回路虚拟实验系统[J]. 实验技术与管理, 2024, 41(9): 111-117.JIAN Z H, CHEN Z X, LIU Y H, et al. Digital twin-based virtual reality experiment system for a hydraulic circuit[J]. Experimental Technology and Management, 2024, 41(9): 111-117(in Chinese). [22] 赵大伟, 张太华, 卢尧, 等. 基于数字孪生体的液压系统知识模型构建及应用[J]. 现代制造工程, 2022(6): 17-24.ZHAO D W, ZHANG T H, LU Y, et al. Construction and application of hydraulic system knowledge model based on digital twin[J]. Modern Manufacturing Engineering, 2022(6): 17-24(in Chinese). [23] SUN J S, YANG Y S, SHI L, et al. Research on fault diagnosis method of the hydraulic system based on digital twin[J]. Journal of Physics: Conference Series, 2024, 2770(1): 012022. [24] WANG L T, LIU Y C, YIN H, et al. Fault diagnosis and predictive maintenance for hydraulic system based on digital twin model[J]. AIP Advances, 2022, 12(6): 065213. [25] LIU H T, ZHANG J C, CHENG Y, et al. Digital twin shop-floor: a complex system-oriented construction method and operation mechanism[J]. Procedia CIRP, 2023, 119: 52-57. [26] ZHOU D X, XIE M Z, XUAN P C, et al. A teaching method for the theory and application of robot kinematics based on MATLAB and V-REP[J]. Computer Applications in Engineering Education, 2020, 28(2): 239-253. [27] 宋增来, 陈振华. N自由度机器人仿真的实现[J]. 计算机工程与设计, 2006, 27(24): 4813-4816.SONG Z L, CHEN Z H. Simulation of N-dof robot[J]. Computer Engineering and Design, 2006, 27(24): 4813-4816(in Chinese). [28] XU B, SHEN J, LIU S H, et al. Research and development of electro-hydraulic control valves oriented to industry 4.0: a review[J]. Chinese Journal of Mechanical Engineering, 2020, 33: 29. [29] 赵洪利, 杨佳强. 基于融合卷积Transformer的航空发动机故障诊断[J]. 北京航空航天大学学报, 2025, 51(4): 1117-1126.ZHAO H L, YANG J Q. Aero-engine fault diagnosis based on fusion convolutional Transformer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(4): 1117-1126(in Chinese). [30] ZHAO J F, MAO X, CHEN L J. Speech emotion recognition using deep 1D & 2D CNN LSTM networks[J]. Biomedical Signal Processing and Control, 2019, 47: 312-323. [31] HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780. [32] HUSSAN U, WANG H Z, PENG J C, et al. Transformer-based renewable energy forecasting: a comprehensive review[J]. Renewable and Sustainable Energy Reviews, 2026, 226: 116356. [33] LEI Y F, JIANG W L, JIANG A Q, et al. Fault diagnosis method for hydraulic directional valves integrating PCA and XGBoost[J]. Processes, 2019, 7(9): 589. [34] 肖健华, 樊可清, 吴今培, 等. 应用于故障诊断的SVM理论研究[J]. 振动、测试与诊断, 2001, 21(4): 258-262.XIAO J H, FAN K Q, WU J P, et al. A study on SVM for fault diagnosis[J]. Journal of Vibration, Measurement & Diagnosis, 2001, 21(4): 258-262(in Chinese). [35] ENCALADA-DÁVILA Á, MOYÓN L, TUTIVÉN C, et al. Early fault detection in the main bearing of wind turbines based on gated recurrent unit (GRU) neural networks and SCADA data[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 5583-5593. [36] MU H S, ZHAI X D, YIN D B, et al. A method of remaining useful life prediction of multi-source signals aero-engine based on RF-Transformer-LSTM[C]//Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics. Piscataway: IEEE Press, 2022: 2502-2507. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 303
- HTML全文浏览量: 109
- PDF下载量: 13
- 被引次数: 0
