



-
摘要:
小型旋翼无人机在潜射过程中的弹射和姿态控制直接影响着潜射工程任务的成败。针对小型旋翼无人机在潜射过程中姿态难以快速调整、发射初始姿态易受海浪干扰等问题,提出一种无人机潜射系统的控制方案。采用带有矢量控制的助推火箭来调整无人机在发射段的姿态,并通过海浪预测模型优化无人机发射时间窗口;针对小型旋翼无人机在弹出后旋翼展开时的姿态不稳定问题,采用基于L1自适应控制方法的姿态控制律进行无人机的增稳设计。仿真结果表明:助推火箭的矢量控制发动机能够在2s内快速调整无人机的俯仰姿态,设计的L1自适应姿态控制律能够在无人机旋翼展开的2s内实现俯仰姿态的稳定控制,并且对潜射场景中气动参数的不确定变化具有一定的鲁棒性。
Abstract:The attitude stability of the underwater-launched small rotor UAV directly affects the result of the entire submarine launch task. Aimed at the problems that the rotor UAV's attitude is difficult to adjust quickly during the launching period, and the initial launch attitude is easily interfered by ocean waves, a novel control scheme for the UAV underwater-launched system is proposed. Meanwhile, this paper specifically uses a booster rocket with a vector control engine to adjust the attitude of the UAV in the launch period, and optimize the UAV launch time by the ocean waves' attitude prediction model. Aimed at the problem of the unstable attitude of the rotor UAV when the rotor unfolds after the launch, the attitude control law based on the L1 adaptive method is designed for stability augmentation. Simulation results show that the vector control engine of the booster rocket can quickly adjust the pitch attitude of the UAV within 2 s. The designed L1 adaptive attitude control law can complete the stable control of the pitch attitude within 2 s when the rotor unfolds, and has robustness to the uncertain changes of aerodynamic parameters in the submarine launch.
-

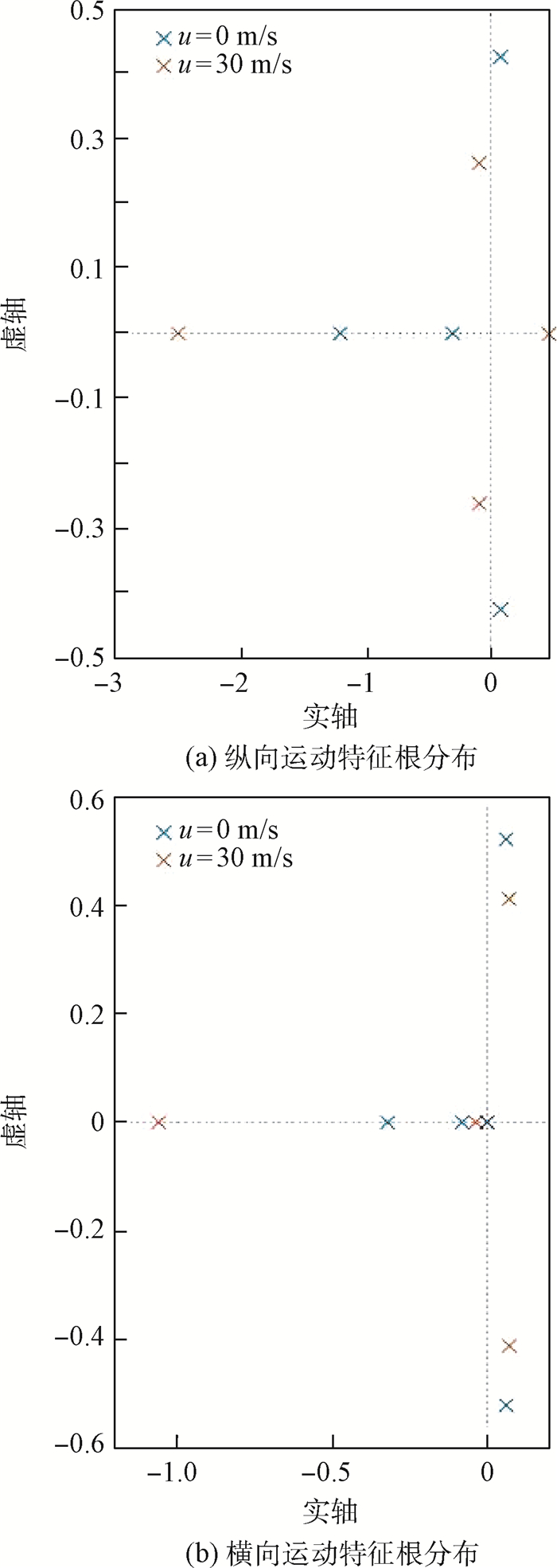
图 9 旋翼无人机纵、横侧向分离运动的特征根
Figure 9. Horizontal and vertical separation motion characteristic roots of rotor UAV
-
[1] DUDGEON G W, GRIBBLE J J. Helicopter attitude command attitude hold using individual channel analysis and design[J]. Journal of Guidance, Control, and Dynamics, 1997, 20(5): 962-971. [2] KIM H J, SHIM D H. A flight control system for aerial robots: Algorithms and experiments[J]. Control Engineering Practice, 2003, 11(12): 1389-1400. [3] WEILENMANN M F, GEERING H P. A test bench for the rotorcraft hover control[J]. Journal of Guidance, Control, and Dynamics, 1994, 17(4): 729-736. [4] 户艳鹏, 李书, 杨延平, 等. 基于H∞回路成形的无人直升机动态逆控制研究[J]. 飞行力学, 2019, 37(6): 79-83.HU Y P, LI S, YANG Y P, et al. Research on dynamic inverse control of unmanned helicopter based on H∞ loop-shaping[J]. Flight Dynamics, 2019, 37(6): 79-83(in Chinese). [5] POSTLETHWAITE I, SMERLAS A, WALKER D J, et al. H∞ control of the NRC Bell 205 fly-by-wire helicopter[J]. Journal of the American Helicopter Society, 1999, 44(4): 1720-1724. [6] YUE A, POSTLETHWAITE I.H∞-optimal design for helicopter control[C]//American Control Conference.Piscataway: IEEE Press, 1988: 1679-1684. [7] STENGEL R F, BROUSSARD J R, BERRY P W. Digital flight control design for a tandem-rotor helicopter[J]. Automatica, 1978, 14(4): 301-312. [8] 宋一可, 李志宇, 王从庆, 等. 基于遗传算法的无人直升机模糊PID姿态控制[J]. 指挥控制与仿真, 2019, 41(6): 113-119.SONG Y K, LI Z Y, WANG C Q, et al. Fuzzy PID attitude control of unmanned helicopter based on genetic algorithms[J]. Command Control & Simulation, 2019, 41(6): 113-119(in Chinese). [9] DZUL A, HAMEL T, LOZANO R. Nonlinear control for a tandem rotor helicopter[J]. IFAC Proceedings Volumes, 2002, 35(1): 229-234. [10] ISHITOBI M, NISHI M, NAKASAKI K. Nonlinear adaptive model following control for a 3-DOF tandem-rotor model helicopter[J]. Control Engineering Practice, 2010, 18(8): 936-943. [11] HUANG C Y, CELI R, SHIH I C. Reconfigurable flight control systems for a tandem rotor helicopter[J]. Journal of the American Helicopter Society, 1999, 44(1): 50-62. [12] 孙全兵. 纵列式航模直升机建模与分析[J]. 国际航空航天科学, 2016, 4(2): 9-15.SUN Q B. Modeling and analysis of aero-model tandem helicopter[J]. Journal of Aerospace Science and Technology, 2016, 4(2): 9-15(in Chinese). [13] 陈绍冯. 基于深度辨识模型的无人直升机自适应控制[D]. 长沙: 中国科学技术大学, 2018.CHEN S F.Deep identifier for dynamic modelling and adaptive control of unmanned helicopter[D]. Changsha: University of Science and Technology of China, 2018(in Chinese). [14] 赵建鹏, 张爱军, 蔡程飞, 等. 基于门控循环网络的海浪波倾角预测研究[J]. 国外电子测量技术, 2019, 38(5): 96-100.ZHAO J P, ZHANG A J, CAI C F, et al. Research on prediction of slope of wave based on GRU network[J]. Foreign Electronic Measurement Technology, 2019, 38(5): 96-100(in Chinese). [15] 刘玉焘. 尾座式无人机的飞行控制器设计[D]. 哈尔滨: 哈尔滨工业大学, 2014.LIU Y T.Design of flight controller for a tail-sitter UAV[D]. Harbin: Harbin Institute of Technology, 2014(in Chinese). -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 1723
- HTML全文浏览量: 367
- PDF下载量: 189
- 被引次数: 0
