



-
摘要:
为了解决异构多自主式水下航行器(AUV)的任务分配问题,提出了一种分布式鲁棒拍卖算法。建立了异构多AUV任务分配分布式拍卖模型,包括任务分配系统(拍卖商)的优化模型及AUV的优化模型。针对现有拍卖算法忽略拍卖商的利益,不符合市场规律的问题,引入任务奖励反馈机制,任务分配系统通过多轮试探拍卖市场,自适应地调整任务奖励,达到保证AUV效用的同时,有效降低任务分配系统成本的目的,促进了任务分配系统参与拍卖。针对水下洋流对任务分配模型产生的不确定性因素,提出了一种鲁棒优化算法对抗不确定性因素,提高了多AUV任务分配系统应对复杂水下环境的能力。仿真结果证明了所提算法的鲁棒性和有效性。
-
关键词:
- 异构多自主式水下航行器(AUV) /
- 任务分配 /
- 分布式 /
- 拍卖算法 /
- 鲁棒优化
Abstract:In order to solve the task assignment problem of multiple heterogeneous autonomous underwater vehicle (AUV), a distributed robust auction algorithm is proposed. First, a heterogeneous multi-AUV task assignment distributed auction model is established, including the task assignment system (auctioneer) optimization model and the AUV optimization model. Second, in view of the existing auction algorithms that ignore the interests of the auctioneer and do not conform to the market rules, we introduce task reward feedback mechanism, and the task assignment system, through several rounds of testing the auction market, adaptively adjusts the task rewards, which effectively reduces the cost of task assignment system when guaranteeing AUV utility at the same time, for the purpose of promoting the task assignment system to participate in the auction. Finally, a robust optimization algorithm is proposed to deal with the uncertainties caused by underwater ocean currents, which improves the ability of multi-AUV task assignment system to deal with complex underwater environment. Simulation results show the robustness and effectiveness of the proposed algorithm.
-

图 4 鲁棒解和标称解Y值的比较
Figure 4. Comparison of Y values between robust solutions and nominal solutions

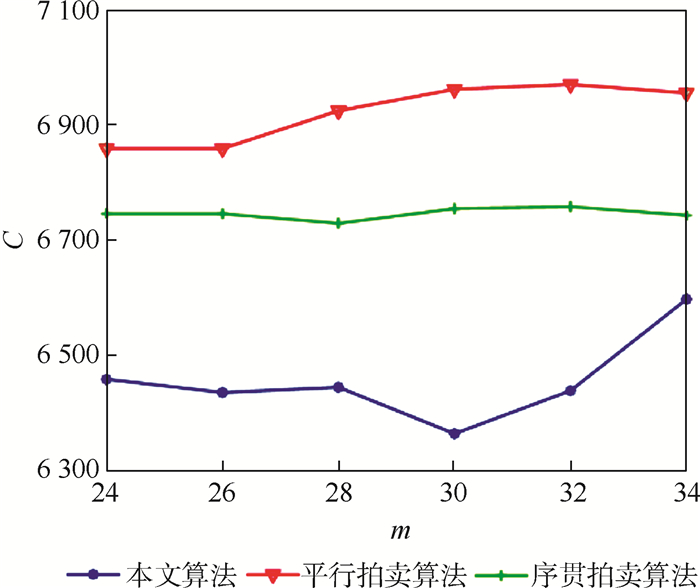
图 5 不同AUV数量下3种算法的C值比较
Figure 5. C value comparison of three algorithms under different AUV numbers

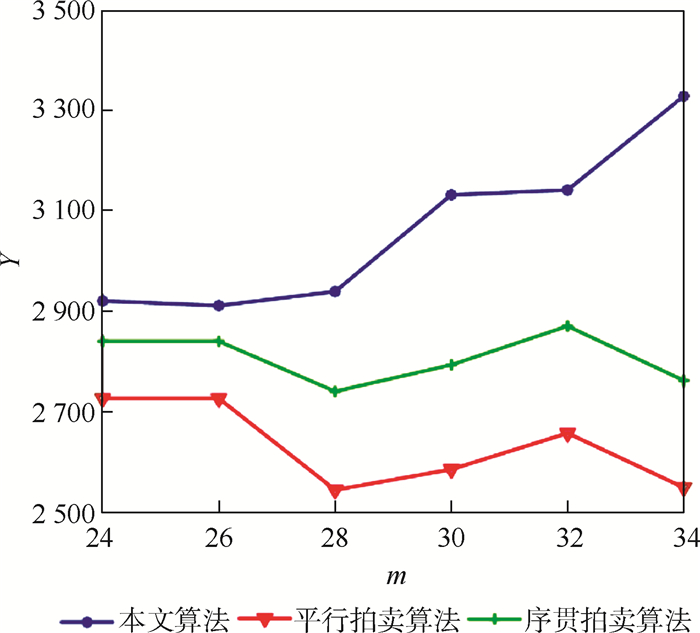
图 6 不同AUV数量下3种算法的Y值比较
Figure 6. Y value comparison of three algorithms under different AUV numbers

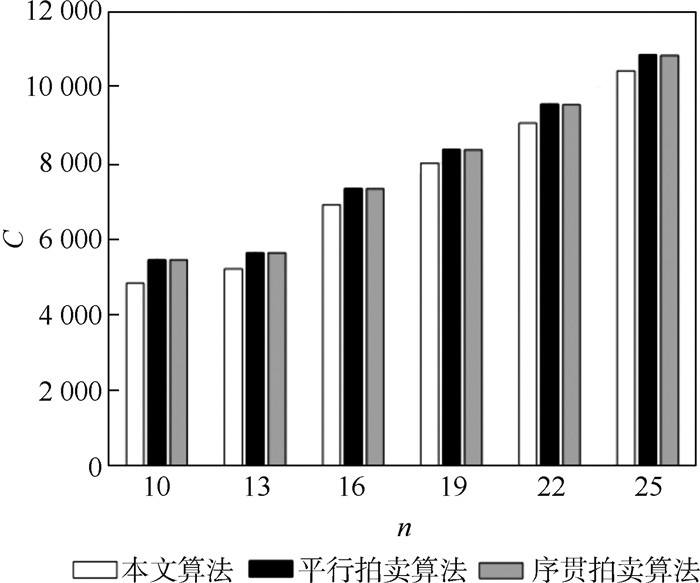
图 7 不同任务数量下3种算法的C值比较
Figure 7. C value comparison of three algorithms under different task numbers

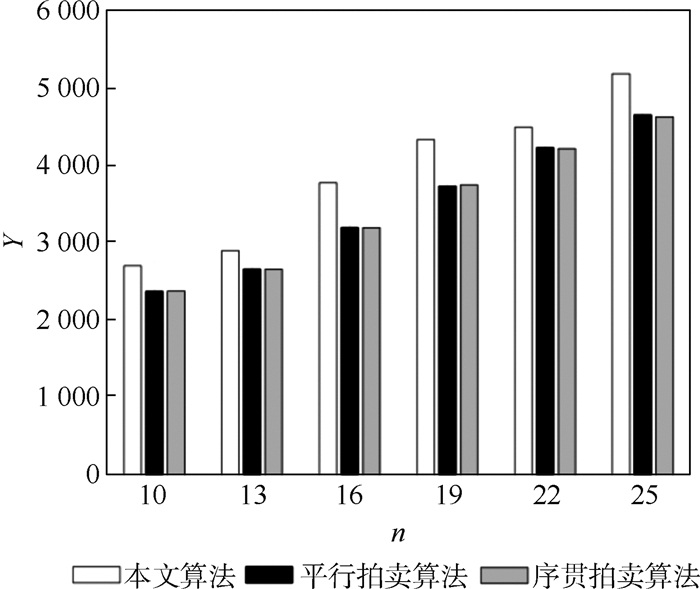
图 8 不同任务数量下3种算法的Y值比较
Figure 8. Y value comparison of three algorithms under different task numbers
表 1 任务参数
Table 1. Task parameters
任务序号θj 任务类型wj 任务能源tj(tE) 任务难度τj 需求AUV数量Lj 1 k 0.66 0.61 1 2 s 0.68 0.73 2 3 l 0.73 0.62 1 4 k 0.54 0.55 1 5 l 0.75 0.74 1 6 s 0.43 0.48 2 7 k 0.66 0.54 1 8 l 0.56 0.80 1 9 s 0.30 0.29 1 10 l 0.57 0.62 1 11 s 0.68 0.63 1 12 k 0.75 0.52 1 13 k 0.56 0.47 1 14 l 0.78 0.73 1 15 s 0.34 0.14 1  下载: 导出CSV
下载: 导出CSV
表 2 不同α下3种算法的C值比较
Table 2. C value comparison of three algorithms under different α
α C 本文算法 平行拍卖算法 序贯拍卖算法 0.6 4 988.2 5 205.8 5 092.9 0.7 5 875.8 6 032.6 5 919.7 0.8 6 459.9 6 859.5 6 746.6 0.9 7 072.5 7 686.3 7 573.4
下载: 导出CSV
表 3 不同α下3种算法的Y值比较
Table 3. Y value comparison of three algorithms under different α
α Y 本文算法 平行拍卖算法 序贯拍卖算法 0.6 2 103.5 1 981.7 2 094.6 0.7 2 593.5 2 354.5 2 467.4 0.8 2 920.2 2 727.2 2 840.1 0.9 3 247.9 3 100.0 3 212.9
下载: 导出CSV
-
[1] CAO X, YU A. Multi-AUV cooperative target search algorithm in 3-D underwater workspace[J]. The Journal of Navigation, 2017, 70(6): 1293-1311. doi: 10.1017/S0373463317000376 [2] ZHU D, LIU Y, SUN B. Task assignment and path planning of a multi-AUV system based on a Glasius bio-inspired self-organising map algorithm[J]. The Journal of Navigation, 2018, 71(2): 482-496. doi: 10.1017/S0373463317000728 [3] CHEN Y, YANG D, YU J. Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(6): 2853-2872. doi: 10.1109/TAES.2018.2831138 [4] CHOUDHURY B B, BISWAL B B. Alternative methods for multi-robot task allocation[J]. Journal of Advanced Manufacturing Systems, 2009, 8(2): 163-176. doi: 10.1142/S0219686709001717 [5] DARRAH M, NILAND W, STOLARIK B. Multiple UAV dynamic task allocation using mixed integer linear programming in a SEAD mission[C]//Infotech@Aerospace, 2005: 7164. [6] GERKEY B P. On multi-robot task allocation[D]. Los Angeles: University of Southern California, 2003. [7] WANG J F, JIA G W, LIN J C, et al. Cooperative task allocation for heterogeneous multi-UAV using multi-objective optimization algorithm[J]. Journal of Central South University, 2020, 27(2): 432-448. doi: 10.1007/s11771-020-4307-0 [8] XU G, LONG T, WANG Z, et al. Target-bundled genetic algorithm for multi-unmanned aerial vehicle cooperative task assignment considering precedence constraints[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2020, 234(3): 760-773. doi: 10.1177/0954410019883106 [9] LI J, ZHANG R B. Multi-AUV distributed task allocation based on the differential evolution quantum bee colony optimization algorithm[J]. Polish Maritime Research, 2017, 24(s3): 65-71. doi: 10.1515/pomr-2017-0106 [10] KIM M H, BAIK H, LEE S. Response threshold model based UAV search planning and task allocation[J]. Journal of Intelligent and Robotic Systems, 2014, 75(3-4): 625-640. doi: 10.1007/s10846-013-9887-6 [11] PARKER L E. ALLIANCE: An architecture for fault-tolerant multi-robot cooperation[J]. IEEE Transactions on Robotics and Automation, 1998, 14(2): 220-240. doi: 10.1109/70.681242 [12] SHI J, YANG Z, ZHU J. An auction-based rescue task allocation approach for heterogeneous multi-robot system[J]. Multimedia Tools and Applications, 2020, 79(21): 14529-14538. [13] 费爱国, 张陆游, 丁前军. 基于拍卖算法的多机协同火力分配[J]. 系统工程与电子技术, 2012, 34(9): 1829-1833. doi: 10.3969/j.issn.1001-506X.2012.09.14FEI A G, ZHANG L Y, DING Q J. Multi-machine cooperative fire distribution based on auction algorithm[J]. Systems Engineering and Electronic Technology, 2012, 34(9): 1829-1833(in Chinese). doi: 10.3969/j.issn.1001-506X.2012.09.14 [14] TANG J, ZHU K, GUO H, et al. Using auction-based task allocation scheme for simulation optimization of search and rescue in disaster relief[J]. Simulation Modelling Practice and Theory, 2018, 82: 132-146. doi: 10.1016/j.simpat.2017.12.014 [15] LEE D H, ZAHEER S A, KIM J H. A resource-oriented, decentralized auction algorithm for multirobot task allocation[J]. IEEE Transactions on Automation Science and Engineering, 2014, 12(4): 1469-1481. [16] CHENG Q, YIN D, YANG J, et al. An auction-based multiple constraints task allocation algorithm for multi-UAV system[C]// 2016 International Conference on Cybernetics, Robotics and Control (CRC). Piscataway: IEEE Press, 2016: 1-5. [17] 于大海. 弱通信条件下的多水下机器人任务分配方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.YU D H. Research on task assignment method of multiple underwater vehicles under weak communication condition[D]. Harbin: Harbin Engineering University, 2013(in Chinese). [18] QTTE M, KUHLMAN M J, SOFGE D. Auctions for multi-robot task allocation in communication limited environments[J]. Autonomous Robots, 2020, 44(3): 547-584. [19] CHAN H, NAN Y, YANG Y, et al. Multi-UAV reconnaissance task assignment for heterogeneous targets based on modified symbiotic organisms search algorithm[J]. Sensors, 2019, 19(3): 734. doi: 10.3390/s19030734 [20] YANG K, WU Y, HUANG J, et al. Distributed robust optimization for communication networks[C]//IEEE INFOCOM 2008-the 27th Conference on Computer Communications. Piscataway: IEEE Press, 2008: 1157-1165. [21] CHEN M, ZHU D. A workload balanced algorithm for task assignment and path planning of inhomogeneous autonomous underwater vehicle system[J]. IEEE Transactions on Cognitive and Developmental Systems, 2018, 11(4): 483-493. -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 1242
- HTML全文浏览量: 604
- PDF下载量: 174
- 被引次数: 0
