



Design of high-gain unknown input observer based on Riccati equation
-
摘要: 针对具有未知输入和测量噪声的一类Lipschitz非线性系统,研究了状态估计、噪声估计及未知输入重构问题.通过将输出噪声看作扩展状态,把原系统转化为描述系统.针对描述系统,首先基于Riccati方程的解,提出了一种高增益观测器设计方法,实现对系统状态的估计和测量噪声的重构;之后,设计二阶高增益滑模观测器精确估计输出的微分,并利用状态和输出微分的估计,提出了一种未知输入的重构方法.在一Riccati方程有解的前提下,所提出的未知输入和测量噪声的重构,均适用于强时变信号.最后,对一个实际模型仿真,验证所提出方法的有效性.Abstract: For a class of Lipschitz nonlinear system, the reconstruction problems of state estimation, unknown input and measurement noise were studied. Regarding the measurement noise as an extended state, the original system can be transformed into a descriptor system. For the descriptor system, first, a high-gain observer which can estimate the states and the measurement noise of original system simultaneously was developed based on the solution of a Riccati equation. Second, a second-order high gain sliding mode observer was used to exactly estimate the derivatives of the system outputs in a finite time. Third, by using the estimates of the states and the output derivatives, an algebraic unknown input reconstruction method was proposed. It was pointed out that both the unknown input and measurement noise reconstruction methods are suitable for stronger time-varying signals. Finally, a numerical simulation of a practical model was given to illustrate the effectiveness of the proposed methods.
-
非易失性快闪存储器(Nonvolatile Flash Memory, NFM)因其高密度和数据在断电后仍能保存的能力而被广泛应用于航天器电子系统关键数据的保存,如配置文件或者重启代码文件。随着半导体工艺尺寸的减小,Flash芯片受到粒子辐射极易发生单粒子效应,严重影响宇航应用。因Flash芯片的内部结构组成复杂,发生单粒子效应后也有多种表现形式。受到辐照引起的效应包含单粒子翻转(Single Event Upset, SEU)、单粒子锁定(Single Event Latch-up, SEL)、单粒子功能中断(Single Event Function Interupt, SEFI)[1-3]、电流“尖峰”(High Current Spike, HCS)[4-7]等效应。其中,Flash芯片电流“尖峰”的研究手段主要为重离子[1-5]和脉冲激光[7]2种。引起电流“尖峰”的原因有2种观点:一种观点认为是局部锁定或者是总线冲突造成[1, 5];另一种观点认为是由于电荷泵、状态机、状态缓存等器件的内部单元受到辐照造成[2-4, 6]。电流“尖峰”的产生与注量、LET值有关,高注量、高LET值下才会引起Flash芯片的电流“尖峰”现象,芯片无数据接收、读取操作的静态工作模式时,发生电流“尖峰”芯片不会损坏。动态模式有读取、写入操作时发生电流“尖峰”现象不会损坏器件。
利用中国科学院国家空间科学中心的皮秒脉冲激光单粒子效应试验装置[7],对一款国产抗辐射加固宇航级Flash芯片进行了试验。在芯片静态工作模式(不对芯片进行读、写操作)下,利用对应于重离子LET值99.8 MeV·cm2/mg的激光能量对全芯片扫描测试未发生SEL,验证了激光试验芯片单粒子效应的有效性;触发了芯片可快速恢复(持续时间约几十毫秒)的电流“尖峰”,利用脉冲激光可精确定位的特点,定位到引起电流“尖峰”的芯片单元为电荷泵。通过改变激光能量、在电荷泵内的不同位置辐照激光、改变示波器的测试周期等参数,分析了电流“尖峰”产生的原因为:达到一定能量(对应LET值)在电荷泵内的相同或不同位置累积辐照而触发电流“尖峰”,能量达到2 450 pJ(1 pJ=10-12 J)后不断累积辐照才有可能损坏芯片,这些结论与文献[2, 4-7]的结论不同。
1. 脉冲激光试验
1.1 被测芯片
被测试芯片为一款国产0.13 μm CMOS工艺抗辐照宇航级Flash,存储位数16 Mbits位、3.3 V单电源快闪Flash存储器,数据由DQ0~DQ7或者DQ0~DQ15输出。芯片信息如表 1所示。为了进行脉冲激光背部辐照试验,因常规芯片为陶瓷封装,开背部封装难度较大,对裸封装芯片进行了板上芯片封装(Chips on Board, COB),并露出芯片背面硅衬底。
表 1 被测试芯片参数Table 1. Tested chip parameters类型 型号 厂商 质量等级 工艺尺寸 封装 工作电压 功耗电流 Flash芯片 YB29LV160 复旦微电子科技有限公司 宇航级 0.13 μm COB 3.3 V < 1 mA(静态) 利用兰州重离子加速器Bi离子,LET值为99.8 MeV·cm2/mg对芯片辐照,芯片不锁定,未测得芯片的电流“尖峰”现象。
1.2 皮秒脉冲激光单粒子效应试验装置
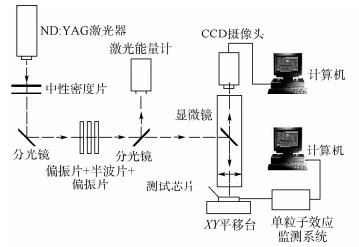
试验采用的皮秒脉冲激光单粒子效应试验装置总体组成包括6个主要部分:①脉冲激光器;②脉冲激光能量调节部件(中性密度片、偏振片等);③脉冲激光能量测量设备(激光能量计);④脉冲激光聚焦定位单元(CCD摄像头及显微镜);⑤实验控制单元(XY平移台);⑥单粒子效应监测系统。装置原理如图 1所示。
 图 1 皮秒脉冲激光单粒子效应试验装置原理图Figure 1. Schematic diagram of pico-second pulsed laser single event effect experimental facility
图 1 皮秒脉冲激光单粒子效应试验装置原理图Figure 1. Schematic diagram of pico-second pulsed laser single event effect experimental facility皮秒脉冲激光单粒子效应试验装置的指标为:激光波长1.064 μm;脉冲宽度25 ps(1 ps=10-12 s);聚焦后光斑直径1~2 μm;脉冲重复频率1~5 kHz;最小扫描步距1 μm;等效LET值范围0.5~135 MeV·cm2/mg。
重离子辐照Si材料产生是由于Si原子核外电子的非弹性碰撞使得Si的价带电子从价带跃迁到导带,产生载流子[8-10]。脉冲激光通过光电效应在Si中产生电子空穴对。两者最终在产生单粒子效应上相同。
脉冲激光等效LET(ELET)值的依据是“脉冲激光和重离子在器件敏感区域单位距离上产生等量的电离电荷”,则激光的ELET值理论上可以表述为[11-15]

(1) 式中:ef为重离子和1 064 nm激光分别产生一个电子-空穴对所需能量的比值;ρ为Si材料的质量密度,均为常数;Eeff为激光到达有源区触发单粒子效应的有效能量。
1.3 试验步骤
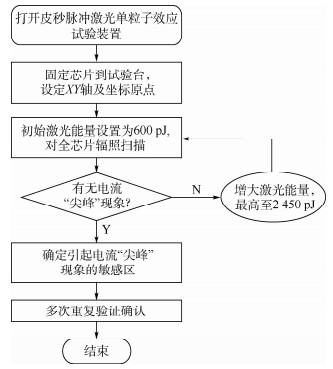
利用皮秒脉冲激光单粒子效应试验装置,对Flash芯片进行了测试,试验步骤如图 2所示。
芯片未发生单粒子锁定现象,但示波器捕获到电源端VDD快速可恢复的电流“尖峰”现象。
1.4 试验结果及分析
1.4.1 电流“尖峰”及原因
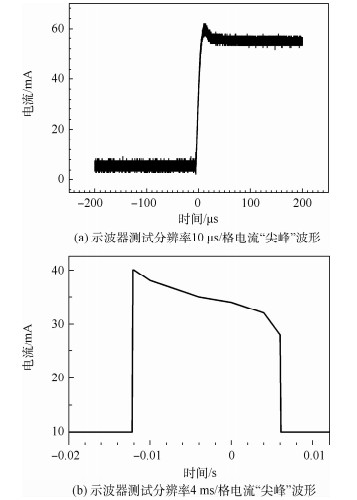
分别利用600 pJ、800 pJ、1 500 pJ、2 450 pJ(分别对应LET值为24.5、32.6、61.1、99.8 MeV·cm2/mg)[8-12]的激光能量对全芯片辐照扫描。最低为800 pJ(对应LET值为32.6 MeV·cm2/mg)时触发了电流“尖峰”现象,此时全芯片扫描时的电流“尖峰”现象都为瞬态可恢复。如图 3(a)所示,示波器测试周期为10 μs,芯片发生电流“尖峰”现象的瞬间电流增加与锁定现象一致,极易误认为发生锁定。但芯片的供电电源端响应速度慢,并未观测到不可恢复的电流增加。
 图 3 同一个位置HCS示波器不同显示分辨率的电流波形Figure 3. Current waveform of same area caused HCS tested by different resolution of oscilloscope
图 3 同一个位置HCS示波器不同显示分辨率的电流波形Figure 3. Current waveform of same area caused HCS tested by different resolution of oscilloscope由图 3(a)可以看出,芯片工作电流瞬间达到峰值约为60 mA,在几微秒后快速降低为50 mA。将示波器的测试分辨率调节为4 ms/格,如图 3(b)所示,芯片在电流降低为40 mA后,在18 ms内平缓降低到约33 mA,最后电流又回到约10 mA的状态,整个电流“尖峰”现象电流持续的时间约为18 ms。
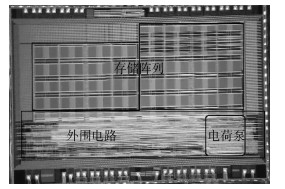
Flash芯片的内部结构如图 4所示。利用精度为1 μm的三维精密移动台,以10 μm的步距对芯片可以引起电流“尖峰”的区域进行扫描,当不能引起器件大电流时,则该区域不是敏感区域,激光能量设置为1 500 pJ,则认为是敏感区域。通过与芯片制造商沟通,确定得到图中黑线标出的电荷泵,面积约为650 μm×600 μm。
需要强调的是,背面辐照定位的坐标与芯片内部构成单元的分布会有一定误差[16]。
由上述结果可知,当激光辐照芯片的电荷泵单元产生电子-空穴对后,电荷被电荷泵吸收,足够的电荷量使电荷泵完成充电过程,而后电荷泵开始放电,放电周期为18 ms,最后减小到10 mA。此过程为典型的电荷泵吸收电荷充电,而后释放的过程。
1.4.2 电荷泵内的电流“尖峰”周期
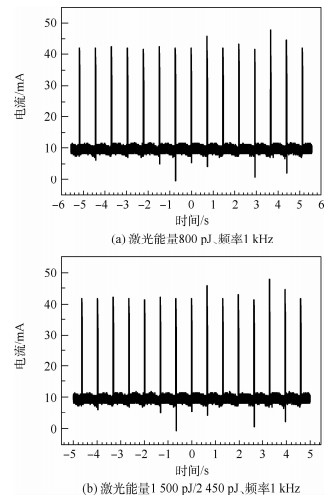
用能量为800 pJ、频率1 kHz的激光,对芯片电荷泵内的一个可触发电流“尖峰”的敏感位置m不断辐照,可以得到周期性的充放电过程,如图 5(a)所示,周期为690 ms。将激光能量提高到1 500 pJ、2 450 pJ,激光频率仍为1 kHz,也可得到周期性的充放电过程,但周期变短为620 ms,如图 5(b)所示。
 图 5 不同激光能量下的芯片电流“尖峰”波形Figure 5. Waveform of chip HCS caused by different laser energies
图 5 不同激光能量下的芯片电流“尖峰”波形Figure 5. Waveform of chip HCS caused by different laser energies激光能量最低为800 pJ时器件会开始产生电流“尖峰”脉冲,此时充放电周期为690 ms;激光能量升高到1 500 pJ时, 电流“尖峰”脉冲的间隔变短为620 ms。虽然激光能量增加了2倍,但间隔只缩短了70 ms,这说明电荷泵吸收了足够的激光能量产生的电子-空穴对,就会产生充电,但吸收的电荷量为固定值,因此最后的电流“尖峰”幅值最后都约为50 mA。低能量时单个节点需要吸收更多的激光脉冲才会引起充放电,这说明电荷泵的充放电自身有一定的周期。激光能量需达到800 pJ、1 500 pJ、2 450 pJ以产生电荷泵充放电所需电荷量。激光能量单个敏感功能单元节点充放电频率分别为1.44 Hz、1.61 Hz、1.61 Hz。
电荷泵属于一种电压源电路,工作时利用电荷共享原理及时钟控制对N级电容进行充放电,如图 6所示。
电荷泵输出的电压Vmax=(N+1)(VDD-VD),VD为二极管电压。激光能量低时,激光产生的电子-空穴对不足以触发Flash芯片的电荷泵产生充电放电过程,当脉冲激光的能量为800 pJ(频率为1 000 Hz)时,电荷泵充电放电的频率为0.75 Hz,器件大电流持续时间为18 ms,放电过程中激光产生的电荷无法被吸收。当激光能量足够高时,激光产生的电荷被电荷泵放大,当一个结构被重复触发多次,激光能量值达到1 500 pJ后,该节点的充放电频率不再变化,这说明单个节点吸收的激光能量有一个最大值,即使激光能量增加,多余的激光能量也不会被芯片的该结构吸收而对大电流有贡献。
1.4.3 电荷泵内不同位置电流“尖峰”周期
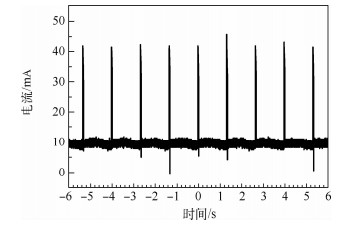
利用能量为800 pJ、频率1 kHz的激光,在芯片电荷泵内可触发电流“尖峰”的敏感位置n点不断辐照,得到周期性的充放电过程,此时电荷泵的充放电周期变长约为1.5 s,如图 7所示。
由图 7可以看出,虽然最终电流幅值相同,但不同的充放电循环之间的间隔时间变长,由620 ms变长为1.5 s。这说明电荷泵不同的位置吸收激光产生电荷的效率不同,敏感位置吸收电荷效率高,充放电循环之间间隔短;次敏感部位的电荷吸收效率低,需吸收更多次的激光辐照才能够引起充放电循环,以触发芯片的电流“尖峰”现象。
2. 电流“尖峰”对航天电子系统的潜在危害
利用重离子Bi离子,LET值为99.8 MeV·cm2/mg对Flash芯片进行单粒子效应辐照时,芯片未锁定且未触发电流“尖峰”现象。而利用脉冲激光对全芯片辐照扫描时,最低为800 pJ(对应LET值为32.69 MeV·cm2/mg)时即触发芯片的大电流状态。
由重离子和激光试验结果对比可看出,这说明激光、重离子在与芯片的作用过程中有所不同。利用重离子辐照时,是对芯片的全部区域进行辐照,重离子是类似均匀的辐照芯片的所有区域,同一个敏感区域无累加效果;而激光是采用步进电机,利用固定的步距对芯片进行扫描,当激光辐照到芯片的电荷泵区域时,激光是沿着芯片的X轴或者Y轴,会累积多个激光辐照到该区域,如被辐照的Flash芯片,电荷泵长轴X为650 μm,扫描步距为5 μm,扫描长轴X需要的时间为130 ms(扫描时间=X轴长度/X轴速度=650/5 000 μm/s),扫描一次X轴就可以注入到电荷泵130个激光,芯片的电流“尖峰”之间间隔周期最低为620 ms,也就是激光扫描一次X轴的电荷泵注入130个激光,产生的电荷量可以满足电荷泵吸收而完成充放电过程。
由激光试验结果可以推断,引起芯片电流“尖峰”现象需要满足电荷泵充电周期足够长,一定数量的离子个数累加才能引起电流“尖峰”现象。如果芯片的电荷泵很敏感,吸收较少的电荷就可以完成充放电过程,则即空间中低LET值、高通量的离子在电荷泵中累加,产生的电荷量足以引起芯片电流“尖峰”现象,势必会对航天电子系统的可靠性产生冲击。因此,在对Flash芯片进行重离子单粒子效应试验考核鉴定时,如果离子的注量率足够高,利用低LET值的离子应充分考虑注量率对试验结果的影响,根据星用轨道高度及任务周期,设置合理的注量率,才能达到最优的验证考核效果。
需要特别强调的是,2 450 pJ激光能量下对电荷泵的同一位置多次触发电流“尖峰”现象会使芯片毁坏。这就说明如果芯片的电荷泵敏感面积足够大,且离子的通量足够高,则容易在电荷泵内积累多次辐照,从而使芯片毁坏。
3. 结论
利用皮秒脉冲激光单粒子效应试验装置,对一款宇航级Flash存储器进行了测试。得到以下结论:
1) 电流“尖峰”现象是由芯片的电荷泵充放电过程导致,在电荷泵的同一位置累积多次或者不同位置在较短的时间间隔内(毫秒量级)累积多次激光辐照,产生的电荷量需满足芯片内的电荷泵在相应的工作状态下的充电要求,因此,对Flash芯片进行重离子单粒子效应试验考核鉴定时,需要考虑注量率的影响。
2) 单个脉冲激光能量值即使达到对应重离子LET值为99.8 MeV·cm2/mg时仍无法触发Flash芯片电流“尖峰”现象,这一点激光与重离子一致。根据本文试验结果可以预估对于Flash芯片的电荷泵单元,利用一定的激光能量(对应重离子一定的LET值)累积辐照引起芯片发生多次电流“尖峰”现象, 累积芯片有可能损坏。
-
[1] Boutayeb M,Darouach M,Rafaralahy H.Generalized state-space observers for chaotic synchronization and secure communication[J].IEEE Transactions on Circuits System-I:Fundamental Theory and Applicatins,2002,49(3):345-349. [2] Wang S H,Davison E J,Dorato P.Observing the states of systems with unmeasurable disturbance[J].IEEE Transactions on Automatic Control,1975,AC-20:716-717. [3] Kudva P,Viswanadham N,Ramakrishna A.Observers for linear systems with unknown inputs[J].IEEE Transactions on Automatic Control,1980,AC-25:113-115. [4] Yang F Y,Wilde R W.Observer for linear systems with unknown inputs[J].IEEE Transactions on Automatic Control,1988,33(7):677-681. [5] Zhu F L.State estimation and unknown input reconstruction via both reduced-order and high-order sliding mode observers[J].Journal of Process Control,2012,22(1):296-302. [6] Bejarano F J,Floquet T,Perruquetti W,et al.Observability and detectability of singular linear systems with unknown inputs[J].Automatica,2013,49(3):793-800. [7] Yang J Q,Zhu F L,Sun X.State estimation and simultaneous unknown input and measurement noise reconstruction based on associated observers[J].International Journal of Adaptive Control and Signal Processing,2013,27(10):846-858. [8] Bejarano F J,Floquet T,Perruquetti W,et al.Observability and detectability of singular linear systems with unknown inputs[J]. Automatica,2013,49(3):793-800. [9] Duan G R.Analysis and design of descriptor linear system[M].New York:Spring-Verlag New York Inc,2010. [10] Sentouh C,Mammar S,Glaser S.Simultaneous vehicle state and road attributes estimation suing unknown input proportional-integral observer[C]//IEEE Intelligent Vehicles Symposium Eindhoven.New York:IEEE,2008:690-696. [11] Wang Z,Shen Y,Zhang X,et al.Observer design for discrete-time descriptor systems:an LMI approach[J].System & Control Letters,2012,61(6):683-687. [12] Darouach M.On the functional observers for linear descriptor systems[J].Systems & Control Letters,2012,61(3):427-434. [13] Koenig D.Observer design for unknown input nonlinear descriptor systems via convex optimization[J].IEEE Transactions on Automatic Control,2006,51(6):1047-1052. [14] Dimassi H,Loria A,Belghith S.Continuously-implement sliding-mode adaptive unknown-input observer under noisy measurements[J].Systems & Control Letters,2012,16:1194-1202. [15] Lee D J,Park Y,Park Y-S.Robust H∞ sliding mode descriptor observer for fault and discrete time descriptor system[J].IEEE Transactions on Automatic Control,2012,57(12):2928-2012. [16] Saberi A,Sannuti P,Chen B M.H2Optimal control[M].Englewood Cliffs,NJ:Prentice-Hall,1995,57(11):145-168. [17] Lewis F L.Applied optimal control and estimation[M].Englewood Cliffs,NJ:Prentice-Hall,1992:176-184. [18] Doyle J C,Stein G.Robustness with observers[J].IEEE Transations on Automatic Control,1979,AC-24:607-611. [19] Kwakernaak H,Sivan R.Linear optimal control systems[M].New York:Wiley,1972:193-198 [20] Levant A.High-order sliding modes:differentiation and output-feedback control[J].International Journal of Control,2003,76(9-10):924-941 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1132
- HTML全文浏览量: 178
- PDF下载量: 691
- 被引次数: 0
 下载:
下载:
