



Vehicle height adjustment of closed-loop air circuit laterally interconnected air suspension system
-
摘要: 为进一步改善空气悬架动力性与能耗经济性,结合互联空气悬架系统与高低压罐气路闭环车身高度调节系统的优点,提出气路闭环横向互联空气悬架系统.针对传统空气悬架车身高度控制策略应用于互联悬架存在的移植性缺陷,构建专门适用于横向互联空气悬架的车身高度比例积分微分-脉冲宽度调制(PID-PWM)控制策略,基于MATLAB/Simulink建立整车数学模型并进行仿真分析.仿真结果表明该控制策略响应迅速,且避免了超调现象,解决了传统空气悬架车身高度控制策略应用于横向互联悬架的移植性缺陷等问题.搭建试验台架,进行车身高度调节试验并对储气罐不同初始气压下充放气时间及控制误差进行研究.试验结果表明,提出的控制策略能准确地实现气路闭环横向互联空气悬架系统车身高度的切换,验证了所建模型的正确性以及控制策略的有效性,储气罐不同初始气压对车身高度调节性能的影响研究为车身高度调节的参数选择提供了依据.
-
关键词:
- 空气悬架 /
- 闭环 /
- 横向互联 /
- 比例积分微分-脉冲宽度调制(PID-PWM) /
- 车身高度调节
Abstract: In order to further improve the dynamic and energy-economic performance of air suspension, a closed-loop air circuit laterally interconnected air suspension structure which combines the advantages of both interconnected air suspension system and closed-loop air circuit air suspension height control system with high and low pressure chambers was proposed. In order to deal with the portability defects caused by traditional air suspension height control strategy when it's applied to the interconnected suspension system, a special proportion integration differentiation-pulse-width modulation (PID-PWM) height control strategy designed for laterally interconnected air suspension was proposed and a corresponding mathematical model was established for simulation study via MATLAB/Simulink. The simulation results show that the control strategy works effectively, the overshoot phenomenon is avoided and the portability defects have been solved. A height adjustment experiment is carried out on a test bench and the impact of different initial pressure of gas chamber on the charging/discharging time as well as the control error during the vehicle height adjustment were studied. The experimental results show that the control strategy for the closed-loop air circuit laterally interconnected air suspension system can adjust the vehicle body height rapidly and accurately. The correctness of the mathematical model and the validity of control strategy are verified. The study about the impact of gas chamber initial pressure provides a theoretical basis for the setting of the vehicle height adjustment system parameters. -
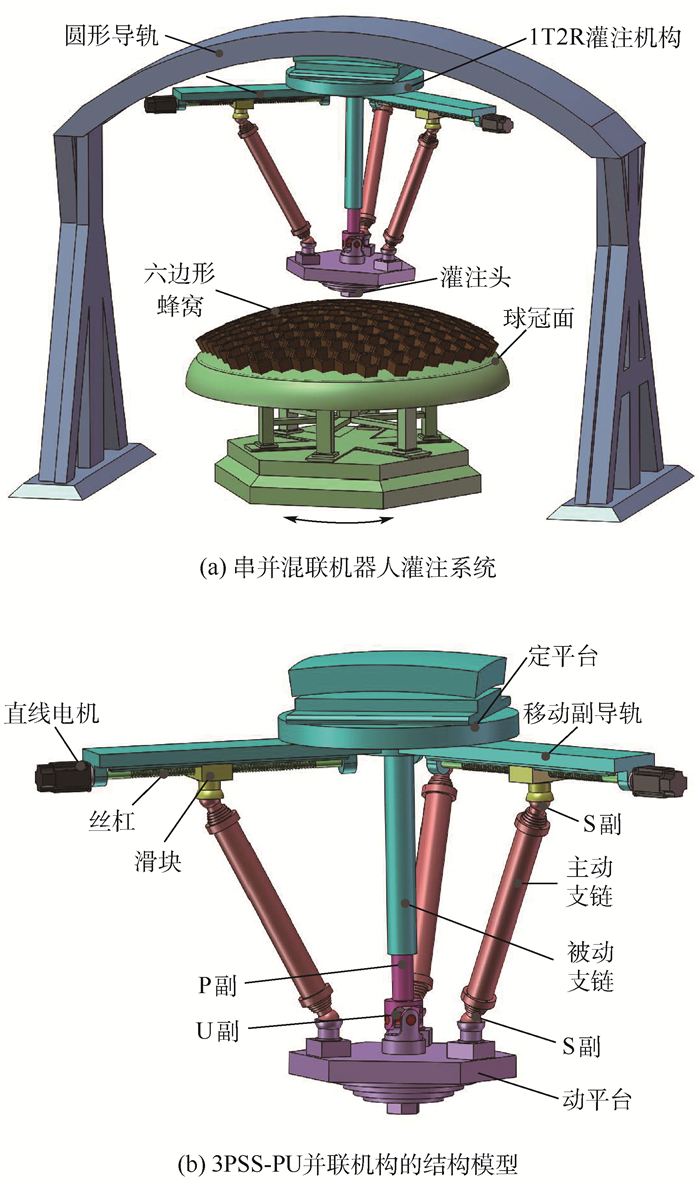
航天器在上升和再入太空阶段受到巨大的气动加热效应,为保证飞行员安全和机载仪器正常运转,需在航天器的外部铺设防热层结构[1]。目前航天器防热层结构通常采用正六边形蜂窝板结构[2-3],通过对蜂窝结构进行防热材料灌注来实现热防护的功能[4-5]。
由于蜂窝结构和防热层材料的特殊性,国内外防热层灌注多采用人工进行,但该灌注方式效率较低,随着中国航天器的发展,球冠面的外形尺寸逐渐变大,人工灌注方式无法满足防热材料灌注的需求,因此,需要提出一种满足要求的灌注机器人。
由于球冠面外形尺寸较大,灌注装置末端需携带负载,要求灌注机器人具有较大的工作空间和较高的刚度。串联机器人因其工作空间大、操作灵活、响应速度快等优点在工业生产方面得到了广泛的应用,例如,PUMA[6]、SCARA[7]和IRB[8]等工业机器人,但串联机器人同时具有刚度小的缺点。而与传统的串联机器人相比,具有复杂结构的并联机器人具有许多明显的优势,例如,高刚度、高精度、高承载能力和误差积累小等优点[9-12],并应用于并联机床[13-14]、喷涂机器人[15]、微操作机器人[16]和力传感器[17]等方面,但并联机器人同时具有工作空间小的缺点。因此,对于灌注机器人来说,单纯的串联机器人和并联机器人都无法完全满足灌注要求。结合以上2种机器人的优点,串并混联机器人可以最大程度地满足航天器防热材料灌注要求。
本文提出一种用于防热层灌注的串并混联机器人,该机器人的工作空间能够覆盖整个球冠面。通过采用被动支链,使得并联机构具有较高的刚度。建立了并联机构的模型,对机构进行了运动学分析,通过约束分析绘制了并联机构的工作空间,在雅可比矩阵的基础上建立了并联机构的刚度模型,利用遗传算法,以工作空间和全局刚度为指标对并联机构的参数进行多目标优化分析。优化结果大大提高了并联机构的刚度和工作空间,能够满足防热层灌注的要求。
1. 机构描述
如图 1(a)所示系统主要由3PSS-PU并联机构、圆形导轨和蜂窝转台组成,其中3PSS-PU并联机构可在圆形导轨上运动,蜂窝转台可绕自身转动, 通过沿导轨和转台的自转使得灌注机构末端操作器能够到达整个蜂窝球冠面。本文重点对3PSS-PU并联机构进行分析,如图 1(b)所示机构由定平台、动平台以及连接定平台和动平台的3个完全相同的主动支链PSS和1个被动支链PU组成,主动支链均匀的分布在定平台上,每个主动支链依次由移动(P)副、球(S)副和球(S)副组成,每个P副由直线电机驱动;被动支链由P副和虎克铰(U)副组成,U副与动平台相连接。由于每条主动支链自由度为6,对动平台不提供约束,所以动平台和中间被动支链具有相同的自由度数,即动平台具有沿x轴和y轴的转动自由度以及沿z轴的移动自由度。
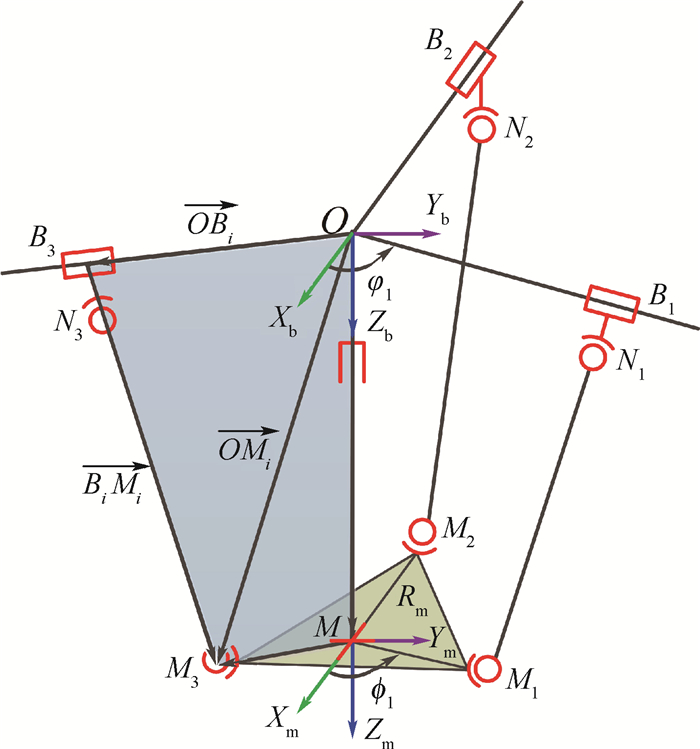
如图 2所示为3PSS-PU机构运动简图,其中B1、B2、B3分别代表 3个移动副,动平台上3个球副分别由M1、M2、M3表示,与P副相连的3个球副分别由N1、N2、N3表示,固定坐标系O-XbYbZb建立在定平台的中心点O,轴线Xb沿导轨


2. 运动学分析
2.1 约束分析
由图 2可得,φi和ϕi参数之间的关系表示如下:

定义θ1和θ2分别为动平台绕x轴和y轴的转角。
因此,可得出动坐标系相对于定坐标系的旋转矩阵:

(1) 式中:RM(x, θ1)为绕x轴旋转θ1的旋转矩阵; RM(y, θ2)为绕y轴旋转θ2的旋转矩阵。
定义zm为动平台沿z轴方向上的坐标,动坐标系原点M在定坐标系下的坐标MO可以表示为

(2) Mi在动坐标系下的坐标MiM可以表示为

(3) 因此,Mi在定坐标系下的坐标MiO可以表示为

(4) 2.2 运动学反解
已知输出构件的位姿,求解输入构件的位置称为机构的运动学反解。由图 2可得,第i个支链的封闭矢量方程可以表示为

(5) 式中:

其中:si(i=1~3)为每个移动副移动的距离;xli、yli、zli分别为向量

将式(4)代入式(5)可得

(6) 式中:Axi=Rmcos ϕicos θ2; Bxi=-cos φi; Ayi=Rmcos ϕisin θ1sin θ2+Rmsin ϕicos θ1; Byi=-sin φi; Azi=-Rmcos ϕicos θ1sin θ2+Rmsin ϕisin θ1+zm; Bzi=0。
根据杆长条件可得

(7) 将式(6)代入式(7)可得

(8) 式中:


因此,由式(8)中可得出运动学反解:

(9) 2.3 雅可比矩阵
由于

(10) 对式(10)两边分别对xmio、ymio和zmio求偏导数,可得

(11) 通过对式(11)整理可得

(12) 式中:λmi=ylisin φi+xlicos φi。
对式(4)两边同时对时间求偏导数可得

(13) 式中:

联立方程式(12)和方程式(13)可得

(14) 式中:xm和ym分别为动平台沿x轴和y轴方向上的坐标;Jp为仅有3条主动支链组成机构的雅可比矩阵:

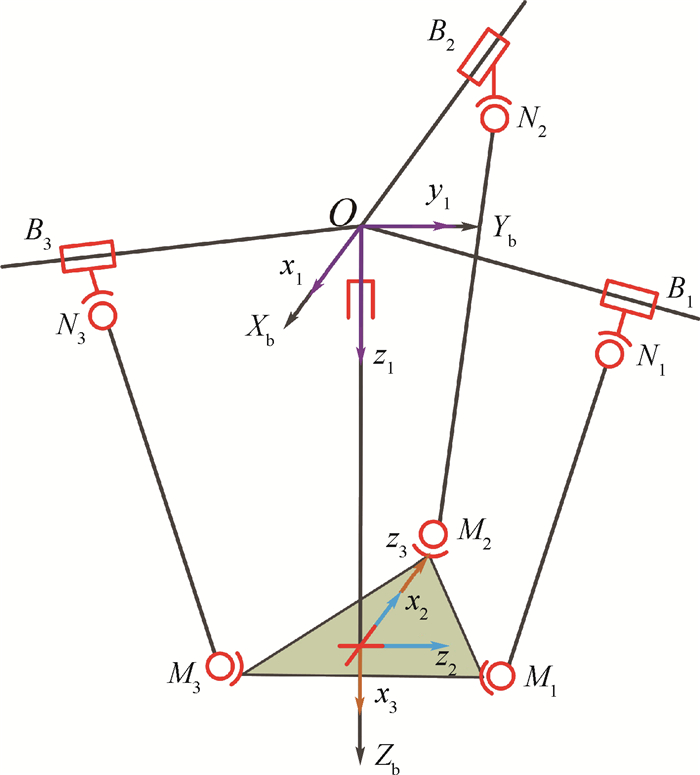
如图 3所示,建立了每个运动副的局部坐标系,因此可得

(15)  图 3 中间被动支链各运动副的局部坐标系Figure 3. Local coordinate system of every kinematic pair of middle passive link
图 3 中间被动支链各运动副的局部坐标系Figure 3. Local coordinate system of every kinematic pair of middle passive link式中:a4i为旋转矩阵A10A21…Aii-1的第3列元素,a40=[0 0 1]T,Aii-1为从第i个坐标系到第i-1个坐标系的旋转矩阵,同时位置矢量可表示为

(16) 其中:b41=[0 0 zm]T;b42=[0 0 0]T;b43=[0 0 0]T。
因此,对于中间约束支链,可得

(17) 将方程式(17)代入方程式(14),可求出并联机构的整体雅可比矩阵:

(18) 式中:

3. 性能分析
3.1 工作空间
根据机构的特点,影响机构工作空间的主要因素有:移动副移动的距离、杆的长度以及连杆分别与定平台和动平台的夹角。其中,移动副移动距离的约束是限制机构工作空间的主要因素。
因此,移动副的相应约束可表示为

(19) 式中:simin和simax分别为移动副的最小和最大位移。
定义主动连杆与动平台之间的夹角为αi,其中杆件的半径忽略不计,故其约束条件可表示为

(20) 式中:αimin和αimax分别为αi的最小值和最大值。

定义主动连杆与定平台之间的夹角为βi,故其约束条件可表示为

(21) 式中:βimin和βimax分别为βi的最小值和最大值。
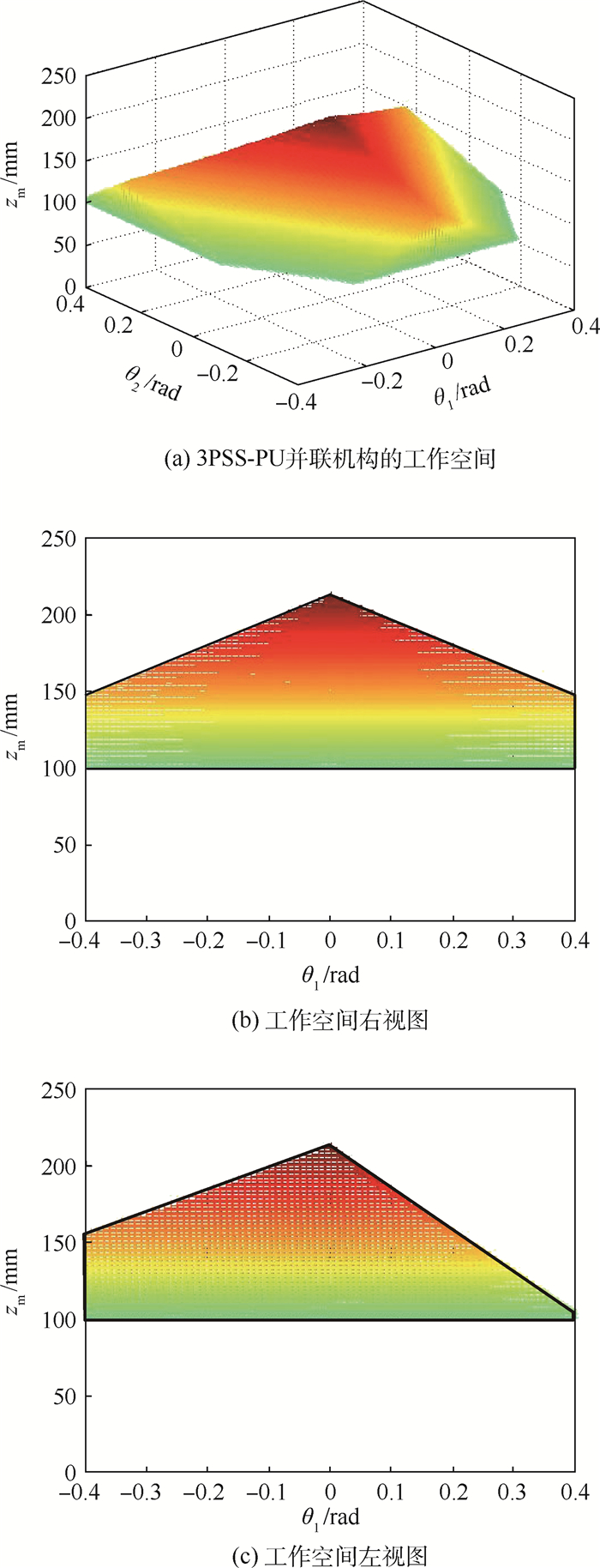
3PSS-PU并联机构结构参数和相关的变量如表 1所示,通过以下参数和以上约束条件,可计算出并联机构在笛卡儿坐标系下的工作空间,如图 4(a)所示, 图 4(b)和图 4(c)分别为工作空间的右视图和左视图。
表 1 3PSS-PU并联机构结构参数Table 1. Structural parameters of 3PSS-PU parallel mechanism参数 数值 Rm/mm 250 li/mm 220 φ1/(°) 60 ϕ1/(°) 60 simin/mm 0 simax/mm 450 αimin/(°) 50 αimax/(°) 120 βimin/(°) 50 βimax/(°) 120  图 4 3PSS-PU并联机构的工作空间及其左、右视图Figure 4. Workspace of 3PSS-PU parallel mechanism and its right and left side views
图 4 3PSS-PU并联机构的工作空间及其左、右视图Figure 4. Workspace of 3PSS-PU parallel mechanism and its right and left side views3.2 刚度模型
为了分析机构在运动过程中刚度的变化趋势,需建立刚度模型,假定整个系统为刚性,得出如下表达式[18]:

(22) 式中:
ε=[τ1 τ2 Fm]T为作用在末端操作器上的力(τ1、τ2)和力矩(Fm)向量;




(23) 式中:k11、k22和k33为纯刚度,代表动平台在同一方向上力或力矩受变形的影响,在刚度矩阵中,这3个参数最重要,即其他参数可以忽略不计,k11, k22的单位为N·mm/rad,k33的单位为N/mm。
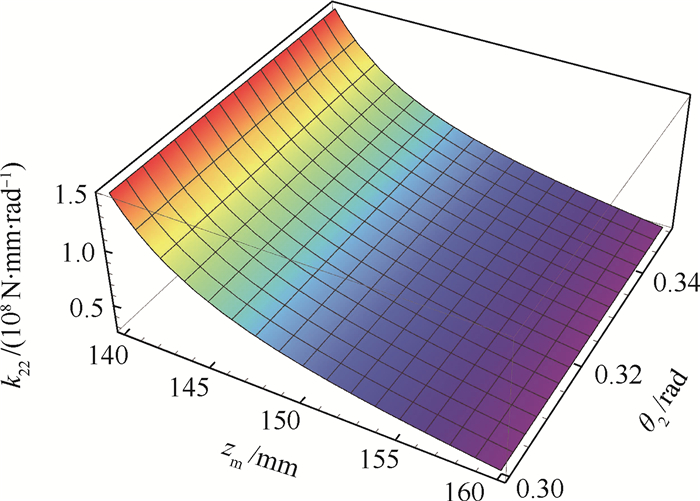
当θ1或θ2为定值时,k22在θ2方向上随着θ2、zm或θ1、zm变化的刚度分布如图 5和图 6所示。随着zm的增大,刚度都逐渐变大,当zm=140 mm时,刚度达到最大值,当zm为常数时,刚度值不随θ2或θ1的变化而变化。
 图 5 k22在θ2方向上随着θ2和zm变化的刚度分布(θ1=0.3 rad)Figure 5. Stiffness distribution of k22 along θ2 with change of θ2 and zm (when θ1=0.3 rad)
图 5 k22在θ2方向上随着θ2和zm变化的刚度分布(θ1=0.3 rad)Figure 5. Stiffness distribution of k22 along θ2 with change of θ2 and zm (when θ1=0.3 rad) 图 6 k22在θ2方向上随着θ1和zm变化的刚度分布(θ2=0.3 rad)Figure 6. Stiffness distribution of k22 along θ2 with change of θ1 and zm (when θ2=0.3 rad)
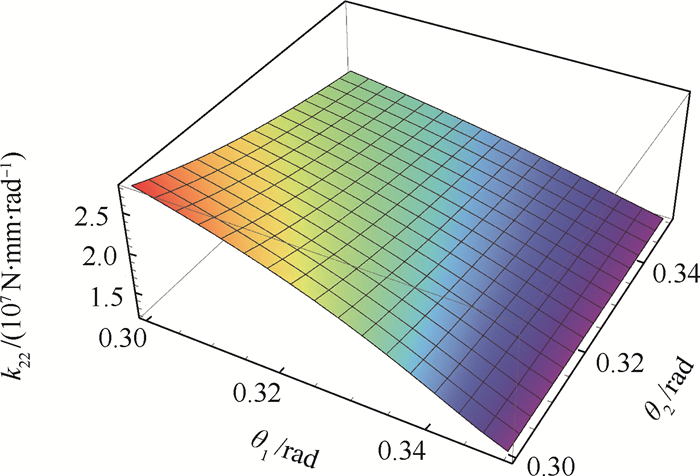
图 6 k22在θ2方向上随着θ1和zm变化的刚度分布(θ2=0.3 rad)Figure 6. Stiffness distribution of k22 along θ2 with change of θ1 and zm (when θ2=0.3 rad)图 7为zm=210 mm时,k22在θ2方向上随着θ1和θ2的变化的刚度分布图, 刚度随着θ1和θ2的增大逐渐变小,当θ1=0.35 rad时,刚度达到最小值。
 图 7 k22在θ2方向上随着θ1和θ2变化的刚度分布(zm=210 mm)Figure 7. Stiffness distribution of k22 along θ2 with change of θ1 and θ2 (when zm=210 mm)
图 7 k22在θ2方向上随着θ1和θ2变化的刚度分布(zm=210 mm)Figure 7. Stiffness distribution of k22 along θ2 with change of θ1 and θ2 (when zm=210 mm)4. 基于遗传算法的多目标优化
4.1 目标函数的建立
优化问题主要由目标函数和约束条件两部分组成[19-20]。目标函数主要包括2个:全局刚度和工作空间。对于全局刚度,由于刚度矩阵中对角线上的主元素k11、k22、k33分别对θ1、θ2、zm上的刚度影响比较大,主要通过这几个刚度值来衡量全局刚度的大小。对于工作空间,可用工作空间内散点的个数来更衡量其大小,避免了复杂的推导过程,同时达到了优化的目的。
全局刚度E可以被描述为

(24) 为区分2个优化目标的收敛曲线,定义以下优化目标函数:

(25) 式中:W为工作空间体积的目标函数;ei和wi分别为第i个性能指标。
结合约束条件,给出优化参数的尺寸约束范围:

(26) 同时,在优化过程中为保证刚度取值在工作空间之内,应对限制工作空间的参数进行约束

(27) 4.2 优化过程
基于遗传算法对3PSS-PU并联机构进行多目标优化,优化的各项参数为:优化代数G为100,群数为20。通过编程计算,得出图 8所示的目标函数优化曲线,图中展示了从0~100代的遗传运算的过程。由图 8(a)可看出60代以后,全局刚度值曲线趋于平稳; 图 8(b)中工作空间散点曲线从40代以后趋于平稳,此时,全局刚度和工作空间散点数都达到最大。如表 2所示,列举了第100代中20组机构的优化设计参数值。
表 2 3PSS-PU并联机构优化设计参数Table 2. Optimum design parameters of 3PSS-PU parallel mechanism组数 机构设计参数 Rm/mm li/mm φ1/rad ϕ1/rad 1 266.608 0 237.058 5 0.676 7 0.687 6 2 269.573 9 237.284 5 0.634 9 0.733 3 3 270.356 9 236.858 3 0.634 9 0.733 3 4 267.452 5 237.519 3 0.676 7 0.687 6 5 269.551 9 237.284 3 0.634 9 0.733 3 6 269.551 9 237.284 3 0.676 7 0.687 6 7 267.452 5 237.519 3 0.676 7 0.687 6 8 267.199 7 237.557 2 0.634 9 0.733 3 9 266.526 2 237.056 6 0.634 9 0.733 3 10 269.573 4 237.284 4 0.634 9 0.733 3 11 270.347 2 236.971 9 0.676 7 0.687 6 12 267.452 5 237.519 3 0.634 9 0.733 3 13 269.551 7 237.284 3 0.634 9 0.733 3 14 269.329 7 237.303 0 0.676 7 0.687 6 15 270.355 1 236.848 2 0.634 9 0.733 3 16 269.562 5 237.280 2 0.634 9 0.733 3 17 269.414 6 237.272 3 0.676 7 0.687 6 18 267.473 7 237.515 3 0.676 7 0.687 6 19 270.339 5 236.969 1 0.634 9 0.733 3 20 267.452 5 237.519 3 0.634 9 0.733 3 为了从20组设计参数中选出一组参数取值,此处采用机构体积最小的原则进行选取,该并联机构的体积公式近似表示为

(28) 由式(28)可知,当si取最大值400mm时,机构的体积最大, 此时机构的体积公式可转化为

(29) 把以上20组参数值代入式(29)对比可得,第9组参数优化值的机构体积最小,因此,取该组参数作为最终优化的设计参数值,整理后列出优化参数前后的对比值,如表 3所示, θ1=θ2=0.34 rad,zm=120 mm时,优化前后的刚度对比值如表 4所示,倍数为优化值与初始值的比值,S为散点数。
表 3 3PSS-PU并联机构优化前后结构参数对比Table 3. Comparison of initial and optimized structure parameters for 3PSS-PU parallel mechanism设计参数 初始值 优化值 Rm/mm 250 267 li/mm 220 237 φ1/rad π/3 0.63 ϕ1/rad π/3 0.73 表 4 3PSS-PU并联机构优化前后刚度参数对比Table 4. Comparison of initial and optimized stiffness parameters for 3PSS-PU parallel mechanism刚度参数 初始值 优化值 倍数 k11 1 272.95 4 023.15 3.160 k22 6.244 17×107 1.102 13×108 1.765 k33 9.851 90×105 9.015 62×106 9.151 E 6.342 81×107 1.192 33×108 1.880 S 929 775 1 069 132 1.150 通过以上对于全局刚度和工作空间的优化可以得出,优化后的机构的刚度和工作空间都变大,在一定条件下,优化后的全局刚度值是初始值的1.880倍,优化后工作空间的散点数是初始值的1.150倍。
5. 结论
1) 提出了一种用于防热层材料灌注的新型3PSS-PU并联灌注机器人,采用被动支链的约束方式,提高了机构的刚度,并通过圆形导轨增大了动平台的工作空间。
2) 建立了并联灌注机构的约束方程,进行了运动学分析,在机构参数约束条件下绘制了机构的工作空间,并在雅可比矩阵的基础上建立了机构的刚度模型。
3) 以全局刚度和工作空间为指标,基于遗传算法对机构进行多目标参数优化,并提出以工作空间内散点的数目来衡量工作空间体积大小,最终给出优化后机构尺寸参数, 为蜂窝灌注机器人应用奠定基础。
-
[1] 郭孔辉,陈禹行,庄晔,等.油气耦连悬架系统的建模与仿真研究[J].湖南大学学报:自然科学版, 2011, 38(3):29-33. Guo K H, Chen Y H, Zhuang Y, et al. Modeling and simulation study of hydro-pneumatic interconnected suspension system[J].Journal of Hunan University:Natural Sciences, 2011, 38(3):29-33(in Chinese). [2] Cao D, Rakheja S, Su C Y.Dynamic analyses of heavy vehicle with pitch-interconnected suspensions[J].International Journal of Heavy Vehicle Systems, 2008, 15(2):272-308. [3] Kat C J, Els P S.Interconnected air spring model[J].Mathematical and Computer Modelling of Dynamical Systems, 2009, 15(4):353-370. [4] 李仲兴,崔振,徐兴,等.互联式空气悬架动态特性试验研究[J].科学技术与工程, 2014, 14(14):82-86. Li Z X, Cui Z, Xu X, et al.Experimental study on the dynamic performance of pneumatically interlinked air suspension[J].Science Technology and Engineering, 2014, 14(14):82-86(in Chinese). [5] Roemer M, Scheerer H, Schweickhardt F.Air suspension having a closed compressed-air system:U.S., Patent 6, 698, 778[P].2004-03-02. [6] 何二宝.电控闭环空气悬架系统车高控制与节能研究[D].广州:华南理工大学, 2012. He E B.Research on vehicle height control and energy saving of electrically controlled closed loop air suspension system[D].Guangzhou:South China University of Technology, 2012(in Chinese). [7] Behmenburg C, Westerkamp H.Closed level control system for a vehicle:U.S., Patent 6, 685, 174[P].2004-02-03. [8] 陈玲,佘亮,车玲玲.基于AMESim的封闭式空气悬架系统车高控制研究[J].机床与液压, 2013, 41(11):86-88. Chen L, She L, Che L L.Research on vehicle height control of closed loop air suspension system based on AMESim[J].Machine Tool & Hydraulics, 2013, 41(11):86-88(in Chinese). [9] 窦辉,陈龙,汪少华,等.电控闭式空气悬架车高调节控制研究[J].机械设计与制造, 2014(9):171-174. Dou H, Chen L, Wang S H, et al.Research on vehicle height adjustment control of electronically controlled closed loop air suspension[J].Machinery Design & Manufacture, 2014(9):171-174(in Chinese). [10] 徐兴.ECAS客车车身高度非线性系统控制的研究[D].镇江:江苏大学, 2010. Xu X.Study on control of ride height nonlinear system for bus with ECAS[D].Zhenjiang:Jiangsu University, 2010(in Chinese). [11] 冯元元,杜群贵.半挂车电控空气悬架车高调节模糊与PWM控制研究[J].科学技术与工程, 2010, 10(32):7974-7979. Feng Y Y, Du Q G.Investigation on body height adjustment for semi-trailer with electrically controlled air suspension and design of fuzzy/PWM controller[J].Science Technology and Engineering, 2010, 10(32):7974-7979(in Chinese). [12] 王伟达,丁能根,徐向阳,等.汽车DYC模糊PID控制方法[J].北京航空航天大学学报, 2009, 35(7):873-876. Wang W D, Ding N G, Xu X Y, et al.Fuzzy-PID control method of vehicular DYC[J].Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(7):873-876(in Chinese). [13] 宋宇.空气悬架车辆车身高度PID控制的仿真研究[J].湖北汽车工业学院学报, 2007, 21(2):1-4. Song Y.Study on ride height PID control technology of air suspension vehicle[J].Journal of Hubei Automotive Industries Institute, 2007, 21(2):1-4(in Chinese). [14] 曾洁如,谷正气,李伟平,等.基于遗传算法的半主动悬架模糊PID控制研究[J].汽车工程, 2010, 32(5):429-433. Zeng J R, Gu Z Q, Li W P, et al.A research on the fuzzy PID control for vehicle semi-active suspension based on genetic algorithm[J].Automotive Engineering, 2010, 32(5):429-433(in Chinese). [15] SMC(中国)有限公司.现代实用气动技术[M].2版.北京:机械工业出版社, 2003:45-51. SMC(China) Ltd.Modern practical pneumatic technology[M].2nd ed.Beijing:China Machine Press, 2003:45-51(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 1406
- HTML全文浏览量: 182
- PDF下载量: 696
- 被引次数: 0
 下载:
下载:
