



-
摘要:
通过在钝头体头部施加人工扰动块可以得到确定的大攻角下的非对称背涡结构。为了研究扰动块形状对非对称背涡结构的影响,本文在攻角50°、雷诺数
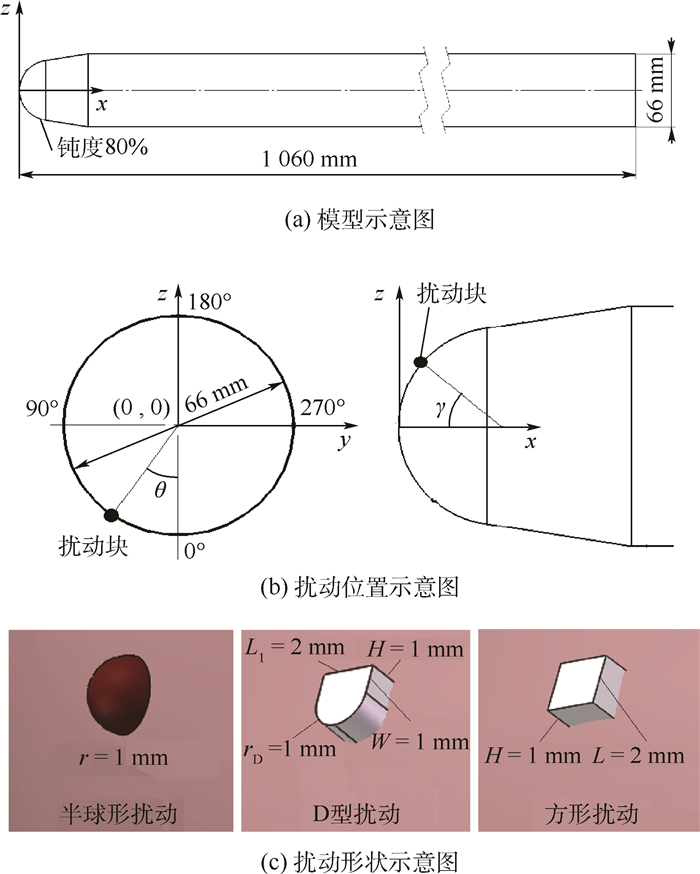
Re D =1.54×105的条件下,利用数值模拟对周向角90°、子午角10°的扰动位置的半球形、D型及方形3种扰动块形状分别进行了研究。研究发现在同一扰动位置,半球形扰动主控下的背涡结构为右涡型,而D型扰动和方形扰动主控下的背涡结构呈现左涡型,且方形扰动主控下的背涡结构的非对称性弱于其他2种扰动主控的非对称背涡。通过分析发现扰动块所引起的微流动直接影响钝头体非对称背涡结构。因此为了更精准地通过施加人工扰动得到确定的非对称背涡结构,应尽量选择形状简单、表面平滑过渡的扰动块形状。Abstract:The asymmetric vortices can be determined through setting the artificial perturbation on the nose of the blunt body at high angle of attack. To study the influence of perturbation geometry on the asymmetric vortices, numerical simulation was applied and the hemispherical, D-type and square perturbations were set on the position circumferential angle 90° and meridian angle 10° respectively at the angle of attack 50° and
Re D =1.54×105. It is found that the vortex structure induced by hemispherical perturbation is shown as right vortex pattern; however the left vortex pattern is shown for the D-type and square perturbations. What is more, the asymmetry of vortex structure for the square perturbation is weaker than that for the other two perturbations. The reason is that the separated flows from different boundaries of the same perturbation influence each other and affect the asymmetric vortex structure. In order to determine the asymmetric vortices accurately by setting artificial perturbation, the geometry of perturbation should be as simple as possible. -
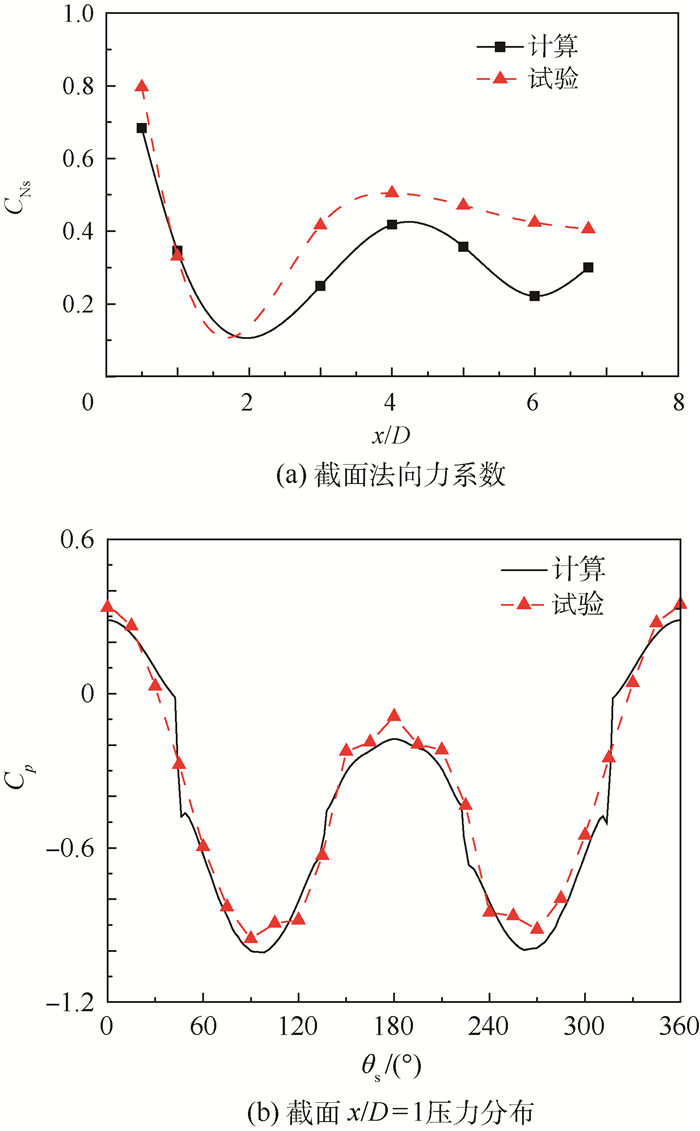
图 2 数值方法验证(V∞=35 m/s,α=40°,θ=90°,γ=40°,ReD=1.54×105)
Figure 2. Verification of numerical simulation method (V∞=35 m/s, α=40°, θ=90°, γ=40°, ReD=1.54×105)

图 3 3种扰动块下钝头体头部压力分布(V∞=35 m/s,α=50°,θ=90°,γ=10°,ReD=1.54×105)
Figure 3. Nose pressure distribution of blunt body for three perturbations (V∞=35 m/s, α=50°, θ=90°, γ=10°, ReD=1.54×105)
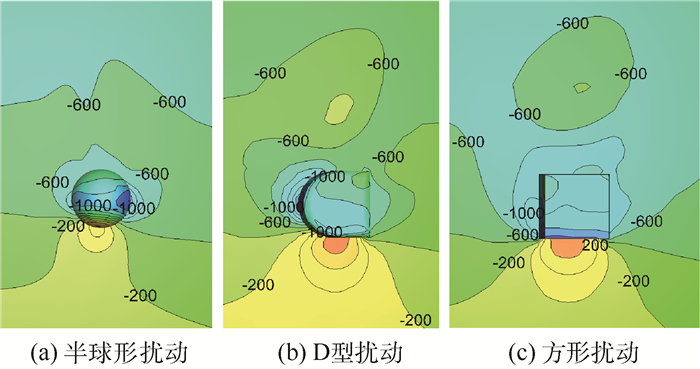
图 4 3种扰动块下扰动位置的压力分布(V∞=35 m/s,α=50°,θ=90°,γ=10°,ReD=1.54×105)
Figure 4. Locational pressure distribution for three perturbations (V∞=35 m/s, α=50°, θ=90°, γ=10°, ReD=1.54×105)

图 6 3种扰动块下模型头部截面的压力系数分布(V∞=35 m/s,α=50°,θ=90°,γ=10°,ReD=1.54×105)
Figure 6. Sectional pressure coefficient distribution of model nose for three perturbations (V∞=35 m/s, α=50°, θ=90°, γ=10°, ReD=1.54×105)
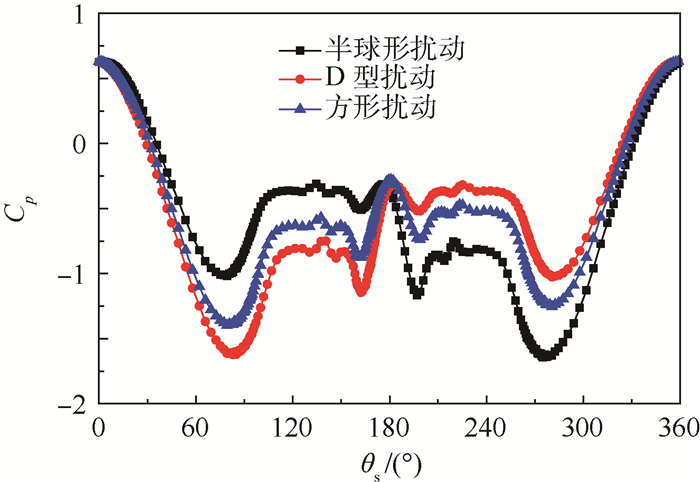
图 7 3种扰动块下截面x/D=2.5的压力系数分布(V∞=35 m/s,α=50°,θ=90°,γ=10°,ReD=1.54×105)
Figure 7. Pressure coefficient distribution for three perturbations at section x/D=2.5 (V∞=35 m/s, α=50°, θ=90°, γ=10°, ReD=1.54×105)

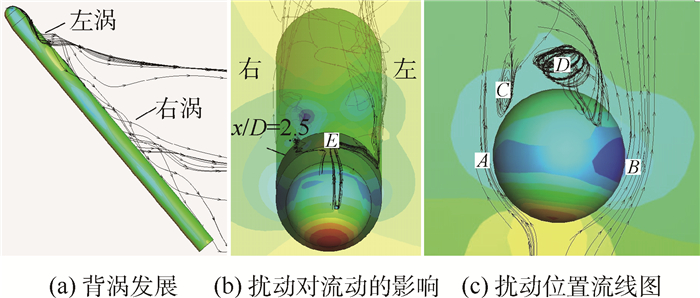
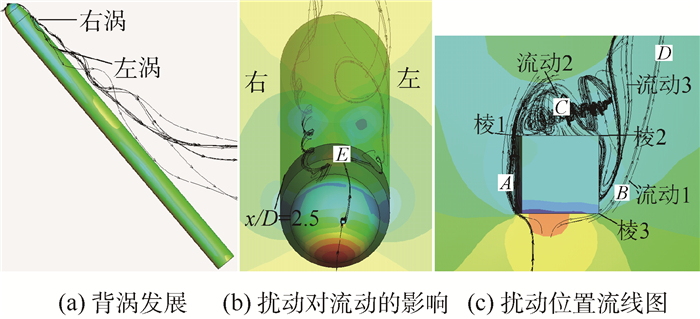
图 8 3种扰动块下截面x/D=2.5的压力分布与流线(V∞=35 m/s,α=50°,θ=90°,γ=10°,ReD=1.54×105)
Figure 8. Pressure distribution and streamlines for three perturbations at section x/D=2.5 (V∞=35 m/s, α=50°, θ=90°, γ=10°, ReD=1.54×105)
-
[1] 王刚, 梁新刚, 邓学蓥.细长体大迎角绕流的滚转角特性[J].实验流体力学, 2004, 18(4):11-14. http://www.cnki.com.cn/Article/CJFDTOTAL-LTLC200404003.htmWANG G, LIANG X G, DENG X Y.Effects of roll angle on side force distribution over slender bodies of revolution at high angle of attack[J].Experiments and Measurements in Fluid Mechanics, 2004, 18(4):11-14(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-LTLC200404003.htm [2] ERICSSON L E, BEYERS M E.Fluid mechanics considerations for successful design of forebody flow control:AIAA-2000-2320[R].Reston:AIAA, 2000. [3] 张涵信, 冉政.细长锥体有攻角绕流对称流态到非对称流态的结构稳定性研究[J].空气动力学学报, 1997, 15(1):20-26. http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX199701002.htmZHANG H X, RAN Z.On the structural stability of the flows over slenders at angle of attack[J].Acta Aerodynamica Sinica, 1997, 15(1):20-26(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX199701002.htm [4] 程克明, 范召林, 尹贵鲁.大攻角流动非对称性成因与对策[J].南京航空航天大学学报, 2002, 34(1):17-21. http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK200201003.htmCHENG K M, FAN Z L, YIN G L.On cause and research strategy of flow asymmetry in high-alpha flows[J].Journal of Nanjing University of Aeronautics and Astronautics, 2002, 34(1):17-21(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK200201003.htm [5] LAMONT P J, HUNT B L.Prediction of aerodynamic out-of-plane forces on ogive-nosed circular cylinders[J].Journal Space-craft and Rockets, 1997, 14(1):38-44. [6] WILLIAMS D A.A review of forebody vortex control scenarios:AIAA-1997-1967[R].Reston:AIAA, 1997. [7] MALOCOLM G N.Forebody vortex control-A progress review:AIAA-1993-3540[R].Reston:AIAA, 1993. [8] 王元靖, 范召林, 侯跃龙, 等.粗糙带对细长体大迎角流动非对称性的影响[J].空气动力学学报, 2005, 23(3):284-288. http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX200503003.htmWANG Y J, FAN Z L, HOU Y L, et al.Effects of grid strip on flow asymmetry over a slender revolution body at high angles of attack[J].Acta Aerodynamica Sinica, 2005, 23(3):284-288(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX200503003.htm [9] MOSKOVITZ C A, HALL R M, DEJARNETTE F R.Effects of nose bluntness, roughness and surface perturbations on the asymmetric flow past slender bodies at large angles of attack:AIAA-1989-2236[R].Reston:AIAA, 1989. [10] DRIVER D M.Reynolds shear stress measurements in a separated boundary layer:AIAA-1991-1787[R].Reston:AIAA, 1991. [11] 周宇, 钱炜褀, 邓有奇, 等.κ-ω SST两方程湍流模型中参数影响的初步分析[J].空气动力学学报, 2010, 28(2):213-217.ZHOU Y, QIAN W Q, DENG Y Q, et al.Introductory analysis of the influence of menter's κ-ω SST turbulence model's parameters[J].Acta Aerodynamica Sinica, 2010, 28(2):213-217(in Chinese). [12] MENTER F R.Zonal two equation κ-ω turbulence models for aerodynamic flows:AIAA-1993-2906[R].Reston:AIAA, 1993. [13] 邓学蓥, 刘沛青, 孔繁美.旋成体非对称背涡特性及其形成机理的研究[J].空气动力学学报, 2000, 18(增刊):121-126. http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX2000S1017.htmDENG X Y, LIU P Q, KONG F M.Investigation on characteristics of asymmetric vortices and mechanism[J].Acta Aerodynamica Sinica, 2000, 18(S1):121-126(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX2000S1017.htm 期刊类型引用(1)
1. 刘涛,杨子渊,蒋燕妮,高贵. 极化SAR图像舰船目标检测研究综述. 雷达学报. 2021(01): 1-19 .  百度学术
百度学术其他类型引用(1)
-

 下载:
下载:


 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 1223
- HTML全文浏览量: 206
- PDF下载量: 717
- 被引次数: 2
