



Dynamic extraction of stochastic error coefficients for gyro based on TheoH variance
-
摘要:
针对运用动态Allan方差提取陀螺随机误差系数时,用截断窗截取原始信号造成方差估计置信度降低的问题,提出运用混合理论方差(TheoH方差)来代替Allan方差对截断窗内的数据进行分析,并提取出随时间变化的陀螺随机误差系数。TheoH方差改善了Allan方差计算时相关时间只能达到信号总时间的二分之一及长相关时间下方差估计置信度降低的问题,其计算的相关时间可以达到数据总时间的四分之三,有效改善了动态算法因数据截取造成误差系数估计置信度下降的缺陷。从对仿真信号和光学陀螺实测数据处理结果上来看,本文方法既能准确地对动态条件下陀螺量测信号的随机误差进行细化辨识,又能大幅提高中、长相关时间下方差估计的置信度。
-
关键词:
- 陀螺 /
- 随机误差系数 /
- 动态Allan方差 /
- 混合理论方差(TheoH方差) /
- 窗函数
Abstract:To solve the problem that the confidence on the estimate is poor when the dynamic Allan variance is used to analyze stochastic error of gyro, due to the reduced amount of data captured by the truncation windows, a new algorithm based on high confidence and hybrid theoretical variance (TheoH variance) is proposed. The Allan variance which is used to analyze the data in the truncation windows is replaced by TheoH variance in the proposed dynamic algorithm. The problems that the averaging time calculated with Allan variance is half of total data length and the confidence decreases at long-term averaging time are perfectly solved, the correlation time of the calculation can reach 3/4 of the total time of data, and the defect that the confidence level of the error coefficient estimates decreased is effectively improved, which is caused by the dynamic algorithm data interception. The measured data of dynamic test for optical gyroscope and simulation data are analyzed with the proposed algorithm and dynamic Allan variance. The results show that the proposed algorithm can describe the non-stationary of gyroscope more effectively and greatly improve the confidence of variance estimation at middle-term and long-term correlation time.
-

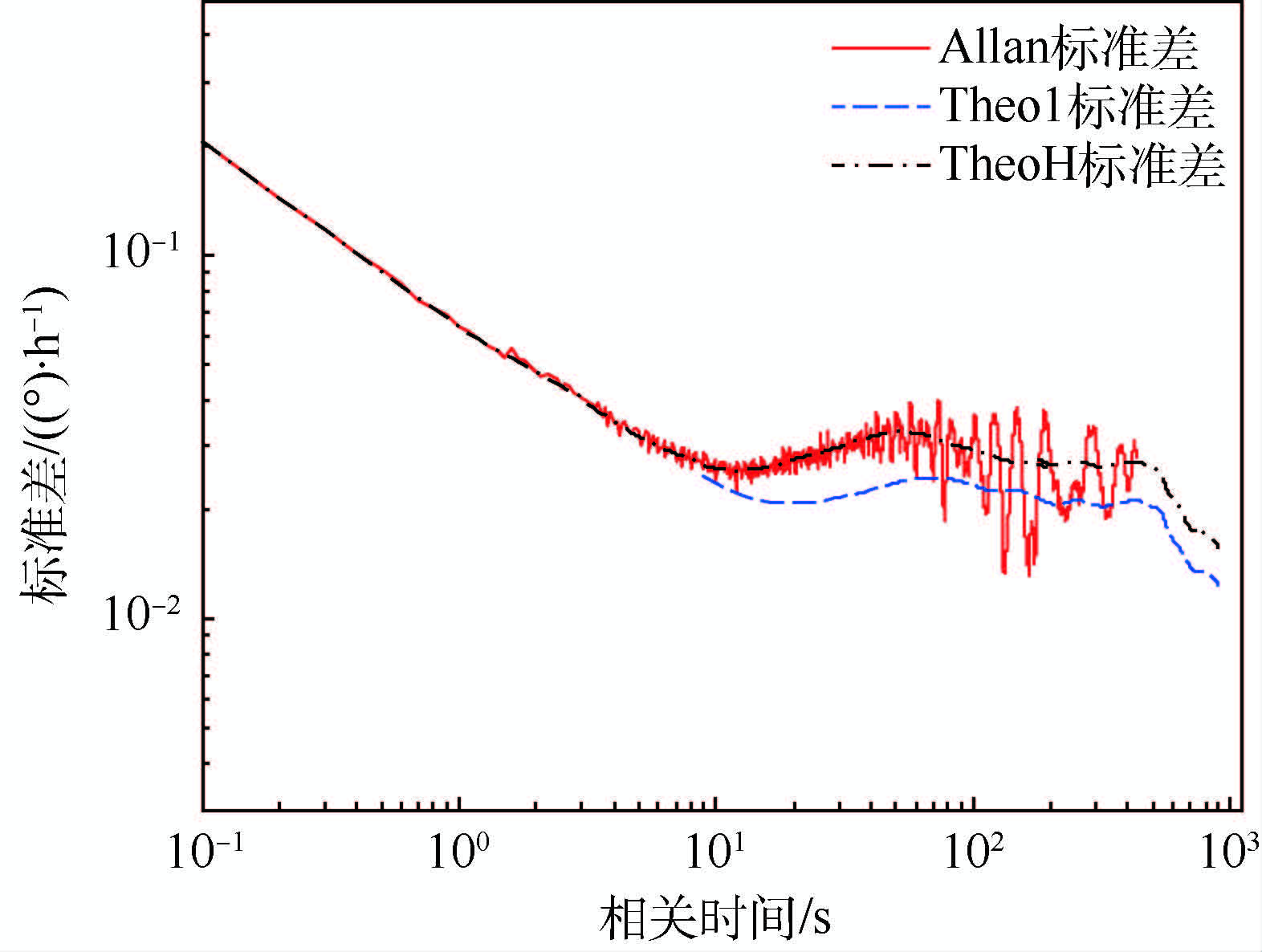
图 5 仿真信号的Allan标准差、Theo1标准差和TheoH标准差分析
Figure 5. Analysis by Allan deviantion,Theo1 deviantion and TheoH deviantion for simulated signal

图 6 实测信号的DAVAR、DHVAR-A和DHVAR分析
Figure 6. Analysis by DAVAR,DHVAR-A andDHVAR for measured signal

图 9 陀螺实测信号随机误差的DHVAR分析
Figure 9. DHVAR analysis of gyro measued signal stochastic error

图 10 各随机误差系数随时间变化曲线
Figure 10. Time-variant curves of different stochasticerror coefficients

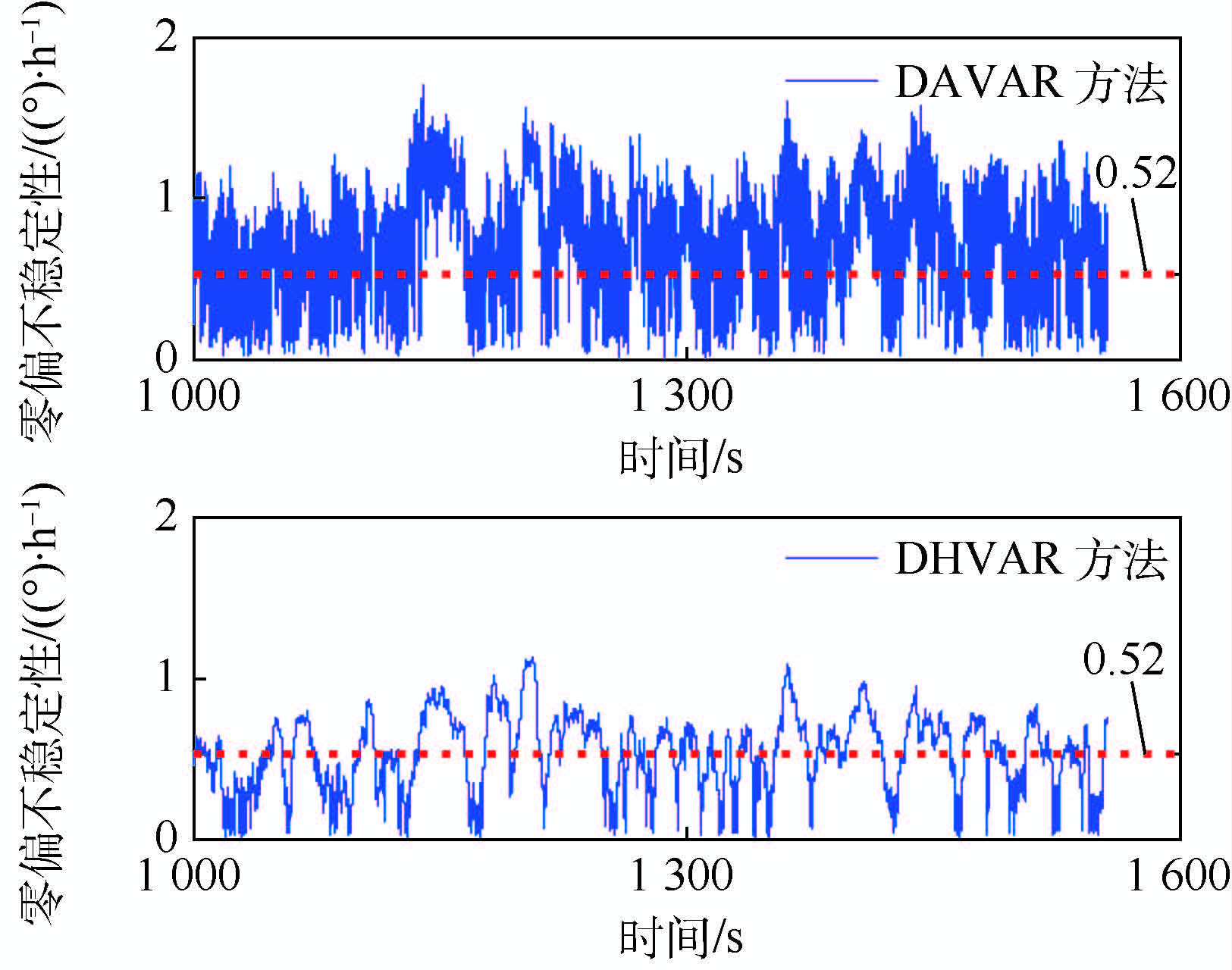
图 11 零偏不稳定性的DAVAR和DHVAR动态提取
Figure 11. Dynamic extraction of bias instabilitywith DAVAR and DHVAR
表 1 各种动态方法下随机误差系数的方差估计值
Table 1. Variance estimation of stochastic error coefficientsby different dynamic methods
系数 单位 期望值 DAVAR DHVAR-A DHVAR Q μrad 0.006 3 0.006 7 0.006 8 0.006 7 N ( )/h1/2 0.001 0 0.001 1 0.001 1 0.001 1 B ( )/h 0.026 5 0.035 4 0.030 8 0.029 9 K (°)/h3/2 0.451 9 1.052 9 0.735 7 0.706 2 R (°)/h2 1.119 3 9.797 3 5.806 5 5.622 4  下载: 导出CSV
下载: 导出CSV
表 2 稳定条件下随机误差系数的估计值
Table 2. Estimation of stochastic error coefficient under steady condition
系数 单位 量纲 期望值 DAVAR DHVAR-A DHVAR Q μrad ×10-3 0.400 0.047 0.043 0.041 N (°)/h1/2 ×10-4 0.011 0.011 0.011 0.011 B ( )/h ×10-2 0.520 0.732 0.545 0.533 K ( )/h3/2 14.1 38.9 20.7 18.3 R (°)/h2 106 735 256 219
下载: 导出CSV
-
[1] 吕琳,全伟.基于GP+GA的陀螺仪随机误差建模分析[J].北京航空航天大学学报,2015,41(6):1135-1140. http://bhxb.buaa.edu.cn/CN/abstract/abstract13300.shtmlLV L,QUAN W.Modeling and analysis of gyroscope's random drift based on GA+GP method[J].Journal of Beijing University of Aeronautics and Astronautics,2015,41(6):1135-1140(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13300.shtml [2] 徐定杰,苗志勇,沈锋,等. MEMS陀螺随机漂移误差系数的动态提取[J].宇航学报,2015,36(2):217-223. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201502014.htmXU D J,MIAO Z Y,SHEN F,et al. Dynamic extraction MEMS gyro random error coefficients[J]. Journal of Astronautics,2015,36(2):217-223(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201502014.htm [3] ZHANG C X,WANG L,GAO S,et al.Dynamic Allan variance analysis for stochastic errors of fiber optic gyroscope[J].Infrared and Laser Engineering,2014,43(9):3081-3088. [4] 王新龙,李娜.MEMS陀螺随机误差的建模与分析[J].北京航空航天大学学报,2012,38(2):170-174. http://bhxb.buaa.edu.cn/CN/abstract/abstract12196.shtmlWANG X L,LI N.Error modeling and analysis for random drift of MEMS gyroscopes[J]. Journal of Beijing University of Aeronautics and Astronautics,2012,38(2):170-174(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12196.shtml [5] 汤霞清,程旭维,高军强.光学陀螺随机误差特性的混合理论方差方法分析[J].兵工学报,2015,36(9):1688-1695. http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201509013.htmTANG X Q,CHENG X W,GAO J Q. Hybrid theoretical variance analysis for random error properties of optic gyroscope[J]. Acta Armamentarii,2015,36(9):1688-1695(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201509013.htm [6] GALLEANI L.Dynamic Allan variance III:Confidence and detection surfaces[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2011,58(8):1550-1558. doi: 10.1109/TUFFC.2011.1982 [7] GALLEANI L,TAVELLA P.The dynamic Allan variance[J]. IEEE Transaction on Ultrasonics, Ferroelectrics,and Frequency Control,2009,56(3):450-460. doi: 10.1109/TUFFC.2009.1064 [8] LI J T,FANG J C. Not fully overlapping Allan variance and total variance for inertial sensor stochastic error analysis[J].IEEE Transactions on Instrumentation and Measurement,2013,62(10):2659-2672. doi: 10.1109/TIM.2013.2258769 [9] HOWE D A.The total deviation approach to long-term characterization of frequency stability[J].IEEE Transactions on Ultrasonic,Ferroelectrics,and Frequency Control,2000,47(5):1102-1110. doi: 10.1109/58.869040 [10] HOWE D A,TASSET T N.Theol:Characterization of very long-term frequency stability[C]//Proceedings of the 18th European Frequency and Time Forum (EFTF 04),Guildford,2004:581-587. [11] 程旭维,汤霞清,黄湘远.基于#1理论方差的光学陀螺长期随机误差分析[J].中国激光,2014,41(10):146-153.CHENG X W,TANG X Q,HUANG X Y.Investigation on random error properties of optic gyroscope based on theoretical variance #1[J].Chinese Journal of Lasers,2014,41(10):146-153(in Chinese). [12] HOWE D A.ThêoH:A hybrid,high-confidence statistic that improves on the Allan deviation[J].Metrologia,2006,43(4):322-331. doi: 10.1088/0026-1394/43/4/S20 [13] LEVINE J,PARKER T E.The algorithm used to realize UTC(NIST)[C]//2002 IEEE International Frequency Control Symposium. Piscataway,NJ:IEEE Press,2002:537-542. [14] 金毅,吴训忠,谢聂.基于Allan方差的光纤陀螺随机漂移建模与仿真[J].应用光学,2014,35(3):547-551. http://www.cnki.com.cn/Article/CJFDTOTAL-YYGX201403039.htmJIN Y,WU X Z,XIE N.Modeling and simulation of FOG random drift based on Allan variance[J].Journal of Applied Optics,2014,35(3):547-551(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YYGX201403039.htm [15] 韦官余,徐伯健,丁阳,等.动态阿伦方差辅助的卡尔曼滤波算法在GPS/INS组合导航中的应用[C]//第三届中国卫星导航学术年会电子文集,2012:330-334.WEI G Y,XU B J,DING Y,et al.Dynamic Allan variance aided Kalman filter in GPS/INS integrated navigation[C]//The Third China Satellite Navigation Conference,2012:330-334(in Chinese). [16] 汪立新,朱战辉,黄松涛.基于峭度和自适应滑动窗的陀螺动态特性分析方法[J].中国惯性技术学报,2015,23(4):533-539. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201504021.htmWANG L X,ZHU Z H,HUANG S T.Dynamic characteristics analysis method for gyroscope based on kurtosis and adaptive sliding window[J].Journal of Chinese Inertial Technology,2015,23(4):533-539(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201504021.htm -

 下载:
下载:









 点击查看大图
点击查看大图
计量
- 文章访问数: 981
- HTML全文浏览量: 192
- PDF下载量: 769
- 被引次数: 0
