



Trajectory planning of a space manipulator with constant zero-disturbance to base attitude
-
摘要:
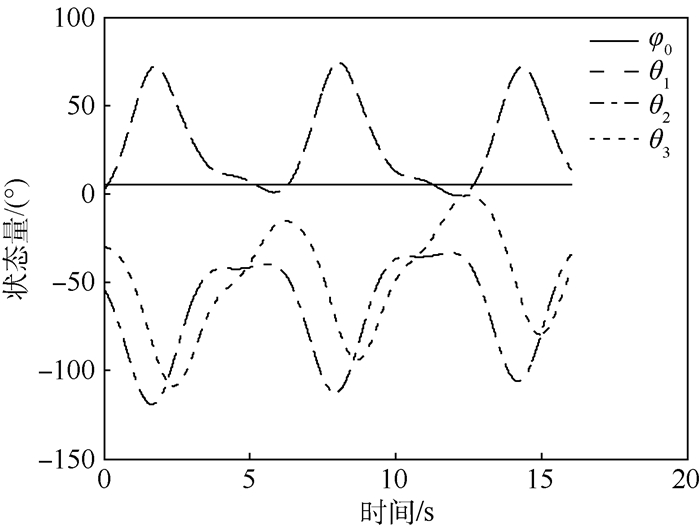
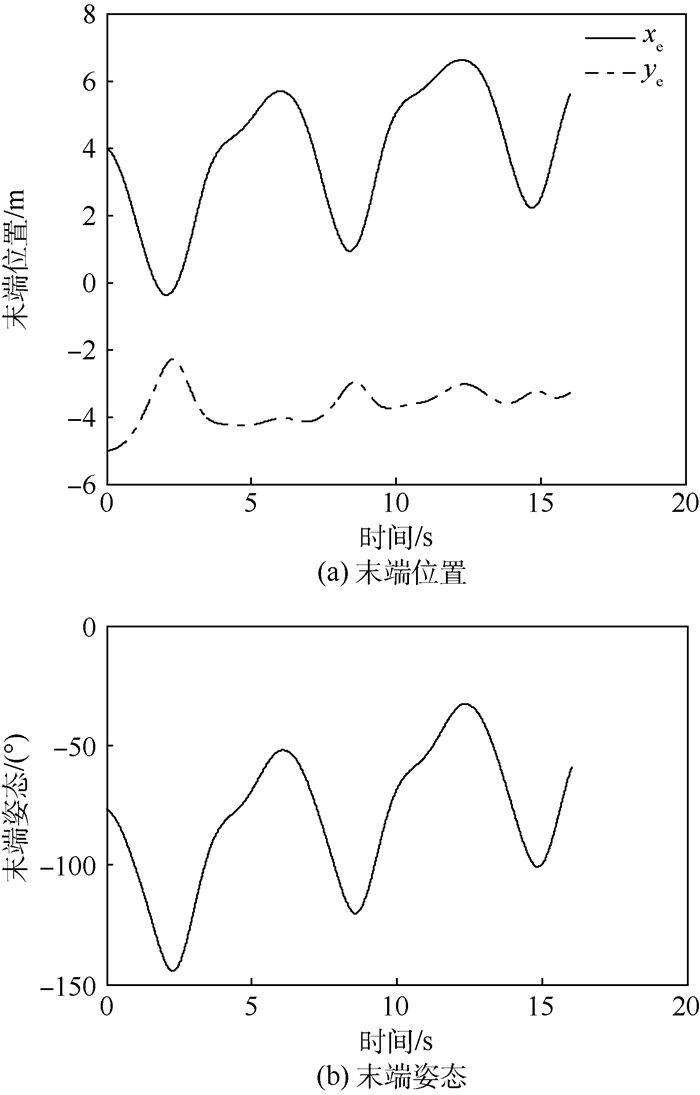
本文研究了全程恒定基座姿态零扰动的自由漂浮空间机器人(FFSR)末端位姿轨迹规划的问题。针对无运动学冗余自由度的三关节平面FFSR系统,首先建立了其末端位姿与关节角之间的状态变换关系,然后给出了以基座姿态和关节角为状态变量的系统方程。根据该系统方程,利用非线性系统的可控性判据证明了在保证全程恒定基座姿态零扰动的前提下,对FFSR系统的末端位置和姿态同时作轨迹规划的可行性;再利用最优控制策略,将轨迹规划问题转换为最优控制问题,设计了一种全程恒定基座姿态零扰动的末端位姿轨迹规划方法。数值仿真验证了结论的正确性和设计方法的有效性。
-
关键词:
- 自由漂浮空间机器人 (FFSR) /
- 轨迹规划 /
- 全程恒定基座姿态零扰动 /
- 可控性 /
- 控制函数参数化
Abstract:The end effector's position & attitude trajectory planning of a free-floating space robot (FFSR) with constant zero-disturbance to the base attitude was investigated. For a kinematically non-redundant three-degree-of-freedom FFSR, a state transformation between the position & attitude of the end effector and the joint angles was deduced, and then the system equations using the base attitude and joint angles as state variables was presented. According to the system equations, the feasibility of the constant zero-disturbance path planning of the end effector's position & attitude was proved via the controllability condition of a nonlinear system, and then a constant zero-disturbance path planning algorithm was developed by an optimal control strategy. Numerical examples validate the effectiveness of the proposed feasibility conclusion and the path planning algorithm.
-
表 1 系统部件参数
Table 1. Parameters of system components
部件 mj/kg Ij/(kg·m2) lj/m B0 500.0 62.5 0.5 B1 100.0 33.3 2.0 B2 100.0 75.0 3.0 B3 100.0 200.0 4.0  下载: 导出CSV
下载: 导出CSV
表 2 轨迹规划任务的始末状态
Table 2. Initial and desired end states of trajectory planning task
状态 时刻/s 基座姿态/(°) 末端位置/m 末端姿态/(°) 关节角/(°) 初始状态 0 5.0 (4.0066; -5.0158) 76.5 (2.5;-54.0; -30.0) 终端状态 16.0 5.0 (5.5877; -3.2883) -60.0
下载: 导出CSV
表 3 迭代变量的初值和终值
Table 3. Initial and final values of iteration variables
变量 取值 α2迭代初值 (0.05, -0.05, 0.05, -0.05, 0.05, -0.05, 0.05) α3迭代初值 (0.05, -0.05, 0.05, -0.05, 0.05, -0.05, 0.05) α2迭代终值 (-0.0505, -0.2734, 0.3977, -0.3145, 0.0181, -0.0292, -0.0859) α3迭代终值 (0.1600, -0.4040, -0.1294, -0.0958, -0.0993, 0.0242, -0.0011)
下载: 导出CSV
-
[1] FRIEND R B.Orbital express program summary and mission overview[C]//Proceeding of SPIE 6958, Sensors and Systems for Space Applications Ⅱ.Orlando:SPIE, 2008, 4:695803.1-695803.11. [2] DEBUS T J, DOUGHERTY S P.Overview and performance of the front-end robotics enabling near-term demonstration (FREND) robotic arm:AIAA-2009-1870[R].Reston:AIAA, 2009. [3] FLORES-ABAD A, MA O, PHAM K, et al.A review of space robotics technologies for on-orbit servicing[J].Progress in Aerospace Sciences, 2014, 68(1):1-26. [4] MOOSAVIAN S A A, PAPADOPOULOS E.Free-flying robots in space:An overview of dynamics modeling, planning and control[J].Robotica, 2007, 25(5):537-547. [5] VAFA Z, DUBOWSKY S.On the dynamics of space manipulator using the virtual manipulator with application to path planning[J].The Journal of the Astronautical Sciences, 1990, 38(4):441-472. doi: 10.1007/978-1-4615-3588-1_3 [6] ZAPPA B, LEGNANI G, ADAMINI R.Path planning of free-flying space manipulators:An exact solution for polar robots[J].Mechanism and Machine Theory, 2005, 40(7):806-820. doi: 10.1016/j.mechmachtheory.2004.12.009 [7] YOSHIDA K, HASHIZUME K, ABIKO S.Zero reaction maneuver:Flight validation with ETS-Ⅶ space robot and extension to kinematically redundant arm[C]//Proceeding of the IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2001:441-446. [8] NENCHEV D N.Reaction null space of a multibody system with applications in robotics[J].Mechanical Sciences, 2013, 4(1):97-112. doi: 10.5194/ms-4-97-2013 [9] HUANG P F, XU Y S, LIANG B.Balance control of multi-arm free-floating space robots during capture operation[C]//Proceeding of the IEEE International Conference on Robotics and Biomimetics.Piscataway, NJ:IEEE Press, 2005:398-403. [10] PATOLIA H, PATHAK P M, JAIN S C.Trajectory control of a dual-arm planar space robot with little attitude disturbance[J].Simulation, 2011, 87(3):188-204. doi: 10.1177/0037549710381654 [11] NAKAMURA Y, MUKHERJEE R.Nonholonomic motion planning of free-flying space robots via a bi-directional approach[M]//XU Y S, KANADE T.Space robotics:Dynamics and control.New York:Springer, 1993:101-130. [12] FERNANDES C, GURVITS L, LI Z X.Attitude control of space platform/manipulator system using internal motion[M]//XU Y S, KANADE T.Space robotics:Dynamics and control.New York:Springer, 1993:131-163. [13] XU W F, LI C, WANG X, et al.Study on non-holonomic cartesian path planning of free-floating space robotic system[J].Advanced Robotics, 2009, 23(1-2):113-143. doi: 10.1163/156855308X392708 [14] KAIGOM E G, JUNG T J, ROSSMANN J.Optimal motion planning of a space robot with base disturbance minimization[C]//11th Symposium on Advanced Space Technologies in Robotics and Automation.Noordwijk:ESA/ESTEC, 2011, 4:1-6. [15] WU J, SHI S, WANG B, et al.Path planning for minimizing base reaction of space robot and its ground experimental study[C]//Proceeding of the IEEE International Conference on Mechatronics and Automation.Piscataway, NJ:IEEE Press, 2009:4627-4632. [16] 付宜利, 张福海, 王树国, 等.载体姿态无扰的自由漂浮空间机器人运动学特性研究[J].宇航学报, 2008, 29(6):1858-1864. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB200806034.htmFU Y L, ZHANG F H, WANG S G, et al.Research on kinematic characteristic of free floating space robot with zero-disturbance spacecraft attitude[J].Journal of Astronautics, 2008, 29(6):1858-1864(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB200806034.htm [17] ZHANG F H, FU Y L, HUA L, et al.Point-to-point planning for free-floating space manipulator with zero-disturbance spacecraft attitude[C]//Proceeding of the IEEE International Conference on Information and Automation.Piscataway, NJ:IEEE Press, 2012:142-147. [18] 徐文福, 刘宇, 强文义, 等.自由漂浮空间机器人的笛卡尔空间连续路径规划[J].控制与决策, 2008, 23(3):278-282. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200803008.htmXU W F, LIU Y, QIANG W Y, et al.Cartesian continuous-path planning for free-floating space robot[J].Control and Decision, 2008, 23(3):278-282(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200803008.htm [19] LIAO Y H, LI D K, TANG G J.Translational zero-disturbance curve and its application to zero-disturbance motion planning of space manipulator system[J].Science China-Technological Sciences, 2011, 54(5):1234-1239. doi: 10.1007/s11431-010-4248-1 [20] CARPENTER M D, PECK M.Reducing base reactions with gyroscopic actuation of space-robotic systems[J].IEEE Transactions on Robotics, 2009, 25(6):1262-1270. doi: 10.1109/TRO.2009.2032953 [21] 贾英宏, 赵楠, 徐世杰.控制力矩陀螺驱动的空间机器人轨迹跟踪控制[J].北京航空航天大学学报, 2014, 40(3):285-291.JIA Y H, ZHAO N, XU S J.Trajectory tracking control of space robot actuated by control moment gyroscopes[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(3):285-291(in Chinese). [22] 孙增圻, 严隽薇, 钱宗华.机器人智能控制[M].太原:山西教育出版社, 1995:58-73.SUN Z Q, YAN J W, QIAN Z H.Robot intelligent control[M].Taiyuan:Shanxi Educational Press, 1995:58-73(in Chinese). [23] HUANG X H, XU S J.Free floating space robot kinematic modeling and analysis[J].Advances in the Astronautical Sciences, 2014, 150(1):2067-2077. [24] CHENG D Z, HU X M, SHEN T L.Analysis and design of nonlinear control systems[M].New York:Springer, 2010:121-146. [25] PAPADOPOULOS E, DUBOWSKY S.Dynamic singularities in free-floating space manipulators[J].Journal of Dynamic Systems, Measurement, and Control, 1993, 115(1):44-52. doi: 10.1115/1.2897406 [26] 徐文福. 空间机器人目标捕获的路径规划与实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2007: 68-104.XU W F.Path planning and experiment study of space robot for target capturing[D].Harbin:Harbin Institute of Technology, 2007:68-104(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 1037
- HTML全文浏览量: 173
- PDF下载量: 428
- 被引次数: 0
