



A CDKF-CPHD multi-target tracking algorithm based on ML background parameter estimation
-
摘要:
针对低信杂比环境下的多机动目标跟踪问题,提出了一种基于极大似然(ML)背景参数估计的中心差分卡尔曼-势概率假设密度滤波(BE-CDKF-CPHD)算法。算法采用ML法实时估计重尾分布模型参数,计算检测概率和虚警概率。运用极大似然-恒虚警(ML-CFAR)算法对信号进行处理, 提取有效量测值, 将幅值似然函数与势概率假设密度滤波器(CPHD)中的目标位置似然函数相结合,通过中心差分法递归更新得到后验均值与协方差,达到对多机动目标进行跟踪的目的。仿真结果表明,在低信杂比环境中,所提算法提高了跟踪精度与目标数目估计准确度。
Abstract:Aimed at the problem of multiple maneuvering targets tracking in low signal-to-clutter ratio backgrounds, a central difference Kalman cardinalized probability hypothesis density filter based on maximum likelihood (ML) background parameter estimation (BE-CDKF-CPHD) is proposed. The ML method is used for estimating the parameters of heavy-tailed distribution, and calculating the detection probability and false alarm probability. The maximum-likelihood constant false alarm rate (ML-CFAR) is employed to process signals. In the CPHD filter, amplitude likelihood function is combined with the likelihood function of target position of the probability hypothesis density filter. The multiple maneuvering target tracking is fulfilled by estimating the mean and variance of posterior multi-target states with central difference Kalman filter. Simulation results show that the novel algorithm improves the estimate performance of target state and number.
-
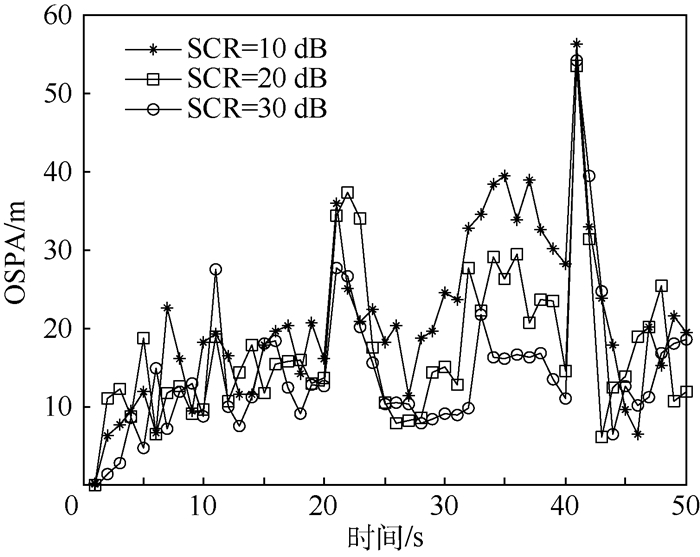
图 2 不同信杂比下的OSPA距离比较
Figure 2. Comparison of OSPA distance under different signal-to-clutter ratios
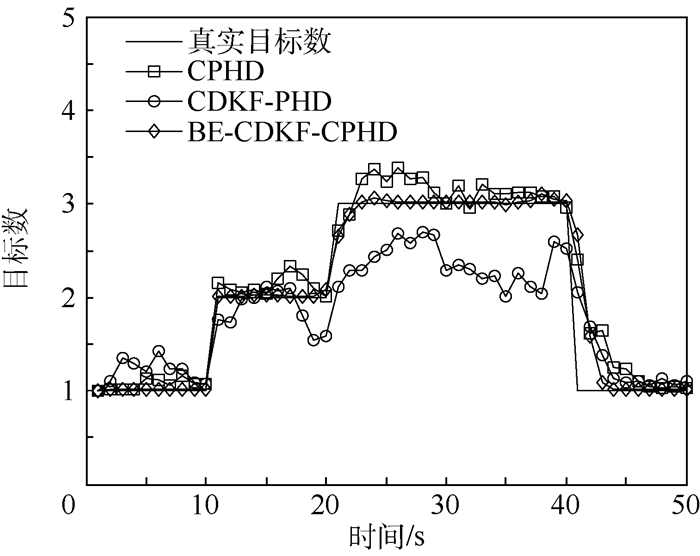
图 4 3种算法的目标数估计与真实目标数的比较
Figure 4. Comparison of true and estimated target numbers for three algorithms
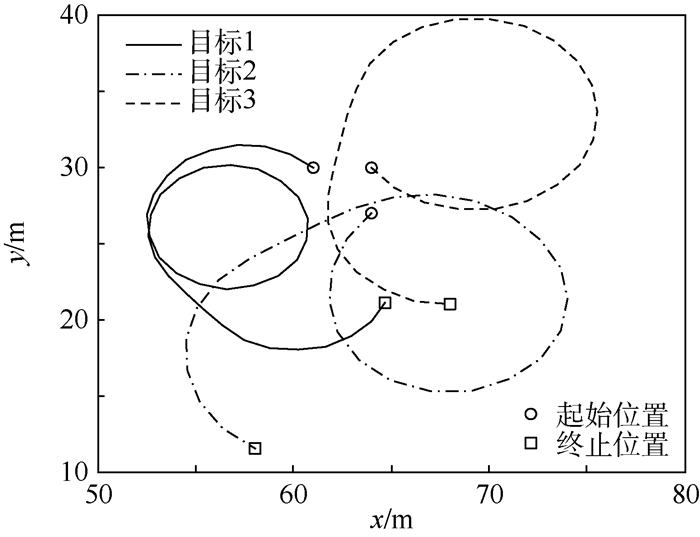
表 1 目标运动参数
Table 1. Target motion parameters
目标 初始 (结束) 时刻/s 初始位置/m 初始速度/(m·s-1) 1 2(40) (61, 30) (-1, 1) 2 12(40) (64, 27) (-1.5, -1.5) 3 12(50) (64, 30) (1, 1.5)  下载: 导出CSV
下载: 导出CSV
表 2 仿真环境
Table 2. Simulation environment
情况 ν b δt SCR/dB 1 2 0.5 2.5 10 2 2 0.1 1 20 3 1 0.1 20 30
下载: 导出CSV
-
[1] STONE L D, STREIT R L, CORWIN T L, et al.Bayesian multiple target tracking[M].2nd ed.London:Artech House, 2013:1-5. [2] MAHLER R P S.Statistical multisource-multitarget information fusion[M].London:Artech House, 2007:5-13. [3] YIN J J, ZHANG J Q, ZHUANG Z S.Gaussian sum PHD filtering algorithm for nonlinear non-Gaussian models[J].Chinese Journal of Aeronautics, 2008, 21(4):341-351. doi: 10.1016/S1000-9361(08)60045-X [4] VO B N, SINGH S, DOUCET A.Sequential Monte Carlo methods for multitarget filtering with random finite sets[J].IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4):1224-1245. doi: 10.1109/TAES.2005.1561884 [5] VO B N, MA W K.The Gaussian mixture probability hypothesis density filter[J].IEEE Transactions on Signal Processing, 2006, 54(11):4091-4104. doi: 10.1109/TSP.2006.881190 [6] CLARK D, VO B T, VO B N.Gaussian particle implementations of probability hypothesis density filters[C]//Proceedings of IEEE Aerospace Conference.Piscataway, NJ:IEEE Press, 2007:1-11. [7] 陈里铭, 陈喆, 殷福亮.基于中心差分卡尔曼-概率假设密度滤波的多目标跟踪方法[J].控制与决策, 2013, 28(1):36-42. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201301006.htmCHEN L M, CHEN Z, YIN F L.Central difference Kalman-probability hypothesis density filter for multi-target tracking[J].Control and Decision, 2013, 28(1):36-42(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201301006.htm [8] 章飞, 周杏鹏, 陈小惠.基于幅值信息的联合概率数据关联粒子滤波算法[J].系统工程与电子技术, 2011, 33(2):453-457. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201102045.htmZHANG F, ZHOU X P, CHEN X H.Joint probabilistic data association particle filter algorithm based on amplitude information title[J].Systems Engineering and Electronics, 2011, 33(2):453-457(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201102045.htm [9] LERRO D, BAR-SHALOM Y.Interacting multiple model tracking with target amplitude feature[J].IEEE Transactions on Aerospace and Electronic Systems, 1993, 29(2):494-509. doi: 10.1109/7.210086 [10] BAE S H, KIM D Y, YOON J H, et al.Automated multi-target tracking with kinematic and non-kinematic information[J].IET Radar Sonar Navigation, 2012, 6(4):272-281. doi: 10.1049/iet-rsn.2011.0154 [11] CLARK D, RISTIC B, VO B N.PHD filtering with target amplitude feature[C]//Proceedings of the 11th International Conference on Information Fusion, FUSION 2008.Piscataway, NJ:IEEE Press, 2008:1-7. [12] QIU C, ZHANG Z, LU H, et al.Amplitude-aided CPHD filter for multitarget tracking in infrared images[J].Progress in Electromagnetics Research B, 2014, 61(1):211-224. [13] ABRAHAM D.Choosing a non-Rayleigh reverberation model[C]//Proceedings of the OCEANS '99 MTS/IEEE-Riding the Crest into the 21st Century.Piscataway, NJ:IEEE Press, 1999, 1:284-288. [14] WARD K D, WATTS S, TOUGH R J A.Sea clutter:Scattering, the K distribution and radar performance[M].2nd ed.London:IET, 2013:375-389. [15] BREKKE E, HALLINGSTAD O, GLATTETRE J.Tracking small targets in heavy-tailed clutter using amplitude information[J].IEEE Journal of Oceanic Engineering, 2010, 35(2):314-329. doi: 10.1109/JOE.2010.2044670 [16] 杨谋存, 聂宏.三参数Weibull分布参数的极大似然估计数值解法[J].南京航空航天大学学报, 2007, 39(1):22-25. http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK200701004.htmYANG M C, NIE H.Advanced algorithm for maximum likelihood estimation of three parameter Weibull distribution[J].Journal of Nanjing University of Aeronautics and Astronautics, 2007, 39(1):22-25(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK200701004.htm [17] RICHARDS M A.Fundamentals of radar signal processing[M].New York:Tata McGraw-Hill Education, 2005:347-382. [18] RAVID R, LEVANON N.Maximum-likelihood CFAR for Weibull background[J].IEE Proceedings, Part F:Radar and Signal Processing, 1992, 139(3):256-264. doi: 10.1049/ip-f-2.1992.0033 [19] NØRGAARD M, POULSEN N K, RAVN O.New developments in state estimation for nonlinear systems[J].Automatica, 2000, 36(11):1627-1638. doi: 10.1016/S0005-1098(00)00089-3 [20] BEARD M, VO B T, VO B N, et al.Gaussian mixture PHD and CPHD filtering with partially uniform target birth[C]//International Conference on Information Fusion.Piscataway, NJ:IEEE Press, 2012:535-541. [21] SCHUHMACHER D, VO B T, VO B N.A consistent metric for performance evaluation of multi-object filters[J].IEEE Transactions on Signal Processing, 2008, 56(8):3447-3457. doi: 10.1109/TSP.2008.920469 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 991
- HTML全文浏览量: 196
- PDF下载量: 443
- 被引次数: 0
