



Design and analysis on uniformity of magnetic flux density in Lorentz force-type magnetic bearing
-
摘要:
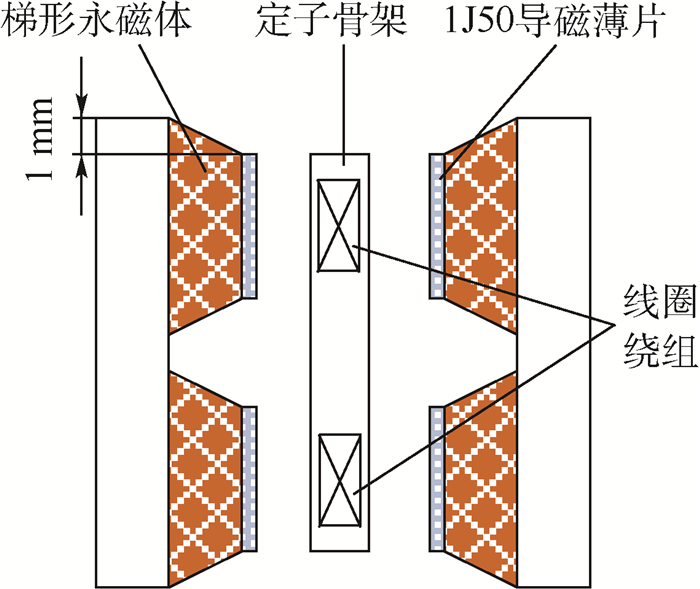
新型磁悬浮控制敏感陀螺(MSCSG)高速转子具有万向偏转特性,可输出高精度和高带宽的偏转控制力矩,用于抑制天基平台的周期性振动。MSCSG采用5自由度(DOF)全主动控制,其径向2个扭动DOF的偏转控制由洛伦兹力磁轴承(LFMB)实现。基于LFMB的基本构型,建立电磁力和电磁力矩的数学模型,并分析出气隙磁密均匀度是影响输出力矩精度和角速率测量精度的主要因素。介绍了LFMB的优化设计结构,通过有限元仿真分析,结果表明所设计LFMB通过在内外永磁体表面增加1J50导磁薄片,能够有效提高气隙磁密分布的均匀度,输出控制力矩更加精确,有利于提高控制精度;通过使用梯形永磁体提供更大的供磁面积提高气隙磁密强度以降低功耗,同时梯形永磁体在转子高速旋转时便于限位,保证稳定性。本文研究可为具有偏转特性的磁悬浮类转子陀螺的设计与分析提供有益参考。
-
关键词:
- 洛伦兹力磁轴承 (LFMB) /
- 均匀度 /
- 精度 /
- 偏转控制 /
- 磁悬浮控制敏感陀螺 (MSCSG)
Abstract:With universal deflection, the high-speed rotor of new magnetically suspended control & sensitive gyroscope (MSCSG) can output high-accuracy and high-bandwidth deflection control torque, which can inhibit periodic vibration of the space-based platform. MSCSG is fully actively controlled in 5 degrees of freedom degrees of freedom (DOF) and its deflection control in 2 radial DOF is realized by Lorentz force-type magnetic bearing (LFMB). Based on basic structure of LFMB, the mathematical model of electromagnetic force and electromagnetic torque were set up and analysis shows that the uniformity of air gap flux density is the main factor that affects output torque accuracy and measuring accuracy of angle rate. The optimized design of LFMB with 1J50 thin slice added to the surface of inside and outside permanent magnet was introduced and the air gap flux density was analyzed to be highly uniform by finite element simulation. The output torque is more accurate and control accuracy is higher. The permanent magnet can support larger magnetic area with a trapezoid cross section to enlarge the air gap flux density and reduce power consumption. Besides, it can remain stable when the rotor is highly rotating. Some useful references can be provided by this paper for the design and analysis of magnetically suspended rotor gyroscope with deflection characteristic.
-
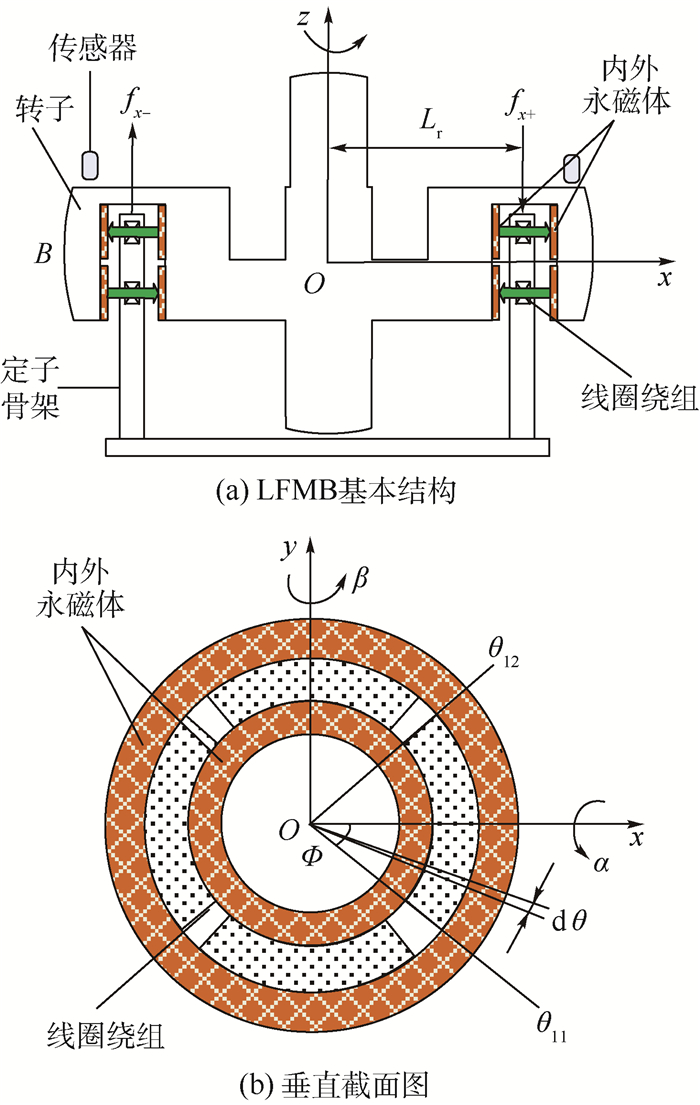
图 3 LFMB结构示意图
Lr—定子半径;fx+—x+向转子所受电磁力;fx-—x-向转子所受电磁力;B—线圈位置气隙磁密;β—绕y轴的偏转角;α—绕x轴的偏转角;θ11—第1组线圈的起端角度;θ12—第1组线圈的末端角度;dθ—线圈微元;2Φ—线圈周向张角。
Figure 3. Structural schematic diagram of LFMB

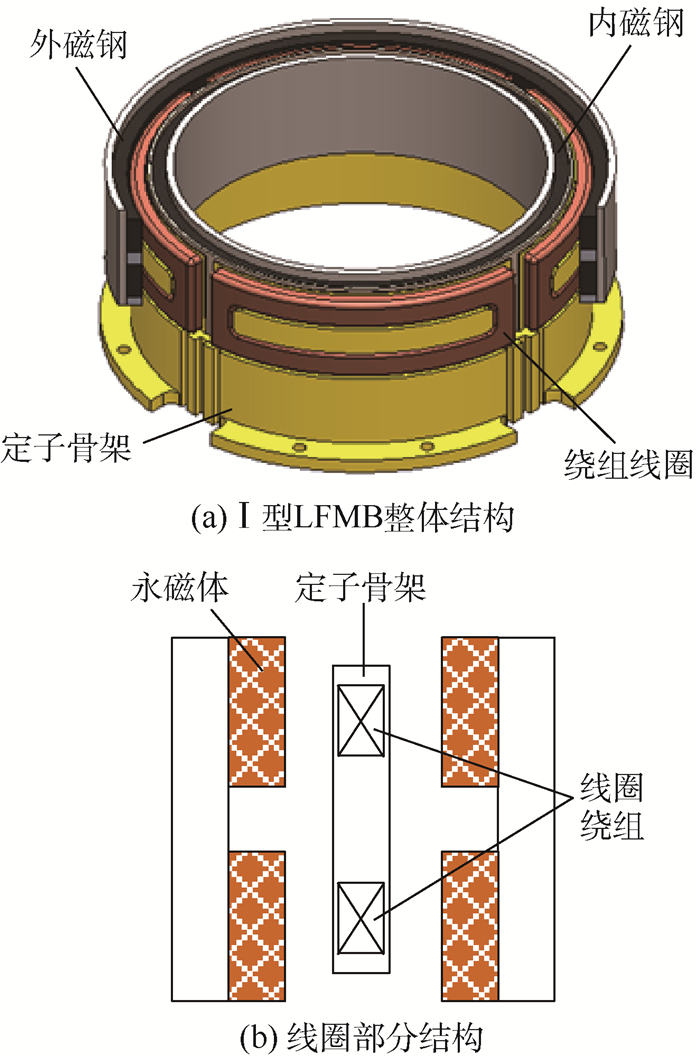
图 5 Ⅰ型LFMB磁密分布云与磁力线图
Figure 5. Graph of magnetic density cloud distribution and magnetic field line for LFMBⅠ
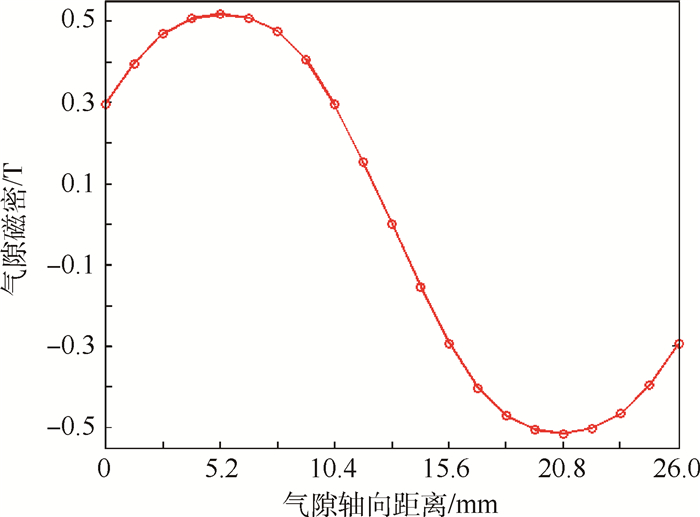
图 6 Ⅰ型LFMB气隙中间位置的轴向磁密分布
Figure 6. Axial magnetic density distribution at middle of air gap for LFMBⅠ

图 7 Ⅱ型LFMB磁密分布云与磁力线图
Figure 7. Graph of magnetic density cloud distribution and magnetic field line for LFMB Ⅱ

图 9 Ⅲ型LFMB磁密分布云与磁力线图
Figure 9. Graph of magnetic density cloud distribution and magnetic field line for LFMB Ⅲ
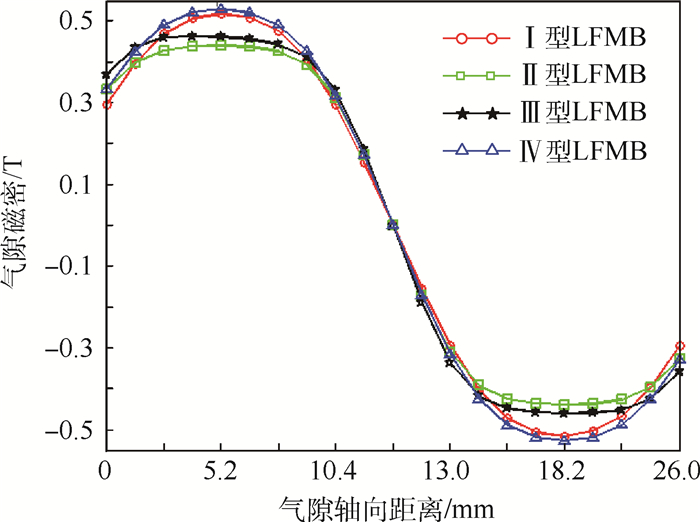
图 10 不同LFMB气隙中间位置的轴向磁密分布比较
Figure 10. Comparison of axial magnetic density distribution at middle of air gap for different LFMBs
表 1 Ⅰ型LFMB主要参数
Table 1. Main parameters of LFMBⅠ
参数 数值 内永磁体内径/mm 103.4 内永磁体外径/mm 111.4 外永磁体内径/mm 124 外永磁体外径/mm 132 永磁体轴向长度/mm 11 上下永磁体间轴向距离/mm 4 线圈轴向长度/mm 8.5 单个线圈沿周向张角/(°) 84 单个线圈匝数 200 槽满率/% 49 单个线圈电阻/Ω 14.3 内转子铁心磁密/T 1.2 外转子铁心磁密/T 1.2 气隙磁密幅值/T 0.516 扭转输出1 N·m力矩时电流/A 0.6 线圈铜耗/W 10.3  下载: 导出CSV
下载: 导出CSV
表 2 不同LFMB结构及其他性能比较
Table 2. Comparison of structure and other properties for different LFMBs
LFMB结构 永磁体形状 是否添加导磁薄片 气隙磁密幅值/T 气隙磁密均匀度 安装稳定性 Ⅰ型 矩形 否 0.516 0.7476 差 Ⅱ型 矩形 是 0.438 0.8683 差 Ⅲ型 梯形 是 0.462 0.8684 好 Ⅳ型 梯形 否 0.528 0.7851 好
下载: 导出CSV
-
[1] 余远金. 全主动磁悬浮飞轮转轴偏转控制方法及实验研究[D]. 北京: 北京航空航天大学, 2015.YU Y J.Study on the control method and experiment of the shaft tilting for the fully active magnetically suspended flywheel[D].Beijing:Beihang University, 2015(in Chinese). [2] FANG J C, ZHENG S Q, HANG B C.AMB vibration control for structural resonance of double-gimbal control moment gyro with high-speed magnetically suspended rotor[J].IEEE Transactions on Mechatronics, 2013, 18(1):32-43. doi: 10.1109/TMECH.2011.2161877 [3] REN Y, FANG J C.Current-sensing resistor design to include current derivative in PWM H-bridge unipolar switching power amplifiers for magnetic bearings[J].IEEE Transactions on Industrial Electronics, 2012, 59(12):4590-4600. doi: 10.1109/TIE.2011.2179277 [4] 解永春.磁悬浮动量轮的主动振动控制[J].航天控制, 2001(2):1-6. http://www.cnki.com.cn/Article/CJFDTOTAL-KJKZ200002003.htmXIE Y C.Active vibration suppression for magnetically suspended momentum wheels[J].Aerospace Control, 2001(2):1-6(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KJKZ200002003.htm [5] 刘侃. 动量矩可偏置磁悬浮动量轮结构设计[D]. 长沙: 国防科学技术大学, 2005.LIU K.The structure design of magnetic suspension momentum wheel with deflection angular momentum[D].Changsha:National University of Defense Technology, 2005(in Chinese). [6] 房建成, 孙津济, 樊亚洪.磁悬浮惯性动量轮技术[M].北京:国防工业出版社, 2012:9-10.FANG J C, SUN J J, FAN Y H.Magnetically suspended inertial momentum wheel technology[M].Beijing:National Defense Industry Press, 2012:9-10(in Chinese). [7] BICHLER U, ECKARDT T.A gimbaled low noise momentum wheel[C]//27th Aerospace Mechanisms Symposium.1993, 1:181-196. [8] SAWADA H, HASHIMOTO T, NINOMIYA K.High-stability attitude control of satellites by magnetic bearing wheels[J].Transaction of the Japan Society for Aeronautical and Space Science, 2001, 44(145):133-141. doi: 10.2322/tjsass.44.133 [9] ROSSINI L, CHETELAT O, ONILLON E, et al.Force and torque analytical models of a reaction sphere actuator based on spherical harmonic rotation and decomposition[J].IEEE/ASME Transactions on Mechatronics, 2013, 18(3):1006-1018. doi: 10.1109/TMECH.2012.2195501 [10] SEDDON J, PECHEV A.3-D wheel:A single actuator providing three-axis control of satellites[J].Journal of Spacecraft and Rockets, 2012, 49(3):553-556. doi: 10.2514/1.A32039 [11] 王春娥. 惯性执行机构用高承载比低功耗磁轴承设计方法与实验研究[D]. 北京: 北京航空航天大学, 2014.WANG C E.Design method and experimental research on high specific load capacity and low loss magnetic bearing in inertia actuator[D].Beijing:Beihang University, 2014(in Chinese). [12] JASTRZE BSKI R P, PÖLLÄNEN R.Compensation of nonlinearities in active magnetic bearings with variable force bias for zero-and reduced-bias operation[J].Mechatronics, 2009, 19(5):629-638. doi: 10.1016/j.mechatronics.2009.01.013 [13] HAN F T, GAO Z Y, LI D M, et al.Nonlinear compensation of active electrostatic bearings supporting a spherical rotor[J].Sensors and Actuators A:Physical, 2005, 119(1):177-186. doi: 10.1016/j.sna.2004.08.030 [14] CHEN M, KNOSPE C.Feedback linearization of active magnetic bearings:Current-mode implementation[J].IEEE/ASME Transactions on Mechatronics, 2005, 10(6):632-639. doi: 10.1109/TMECH.2005.859824 [15] CHEN S, LIN F.Robust nonsingular terminal sliding-mode control for nonlinear magnetic bearing system[J].IEEE Transactions on Control Systems Technology, 2011, 19(3):636-643. doi: 10.1109/TCST.2010.2050484 [16] GROCHMAL T, LYNCH A.Precision tracking of a rotating shaft with magnetic bearings by nonlinear decoupled disturbance observers[J].IEEE Transactions on Control Systems Technology, 2007, 15(6):1112-1121. doi: 10.1109/TCST.2006.890300 [17] 刘彬, 房建成, 刘刚.一种磁悬浮陀螺飞轮方案设计与关键技术分析[J].航空学报, 2011, 32(8):1478-1487. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201108013.htmLIU B, FANG J C, LIU G.Design of a magnetically suspended gyrowheel and analysis of key technologies[J].Acta Aeronautica et Astronautica Sinica, 2011, 32(8):1478-1487(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201108013.htm 期刊类型引用(4)
1. 周红华,黄辰,肖伟剑,陈向进,兰景权,许志刚,汪倍吉. 移动通信基站电磁辐射环境影响仿真预测与评价. 环境影响评价. 2020(03): 57-62 .  百度学术
百度学术2. 周红华,黄辰,肖伟剑,陈向进,兰景权,汪倍吉,许志刚. ±45°双极化通讯基站正向地面电磁辐射随角度变化的预测——通讯基站50m内电磁辐射环境超标范围3D准确仿真预测实验之二. 海峡科学. 2019(01): 8-13 . 百度学术3. 吴雅琴,杨硕,师兰兰. 基于位置指纹与PDR融合的室内定位算法研究. 矿业科学学报. 2019(05): 448-454 . 百度学术4. 周红华,黄辰,肖伟剑,兰景权,陈向进,许志刚,汪倍吉. 通讯基站50m内轴向发射电磁辐射预测——通讯基站50m内电磁辐射环境超标范围3D准确仿真预测实验之一. 海峡科学. 2018(11): 27-31 . 百度学术其他类型引用(1)
-

 下载:
下载:

 百度学术
百度学术
 点击查看大图
点击查看大图

计量
- 文章访问数: 1135
- HTML全文浏览量: 116
- PDF下载量: 828
- 被引次数: 5
