



-
摘要:
基于滑模控制与自适应理论,对使用单框架控制力矩陀螺群(SGCMGs)的刚性航天器的被动姿态容错控制问题进行了研究。首先建立了含有陀螺框架转速故障的系统数学模型。然后将框架转速直接作为控制量并应用滑模控制理论设计了容错控制器,同时控制器中还设计了自适应律对故障信息和干扰进行估计。由此,可在故障和干扰的先验信息未知的情况下,实现对航天器无故障和有故障情况下的姿态稳定控制,且具有较强的鲁棒性。最后,对2种构型单框架控制力矩陀螺群的不同故障模式进行数学仿真,验证了该控制方法的有效性和可行性。
-
关键词:
- 航天器 /
- 单框架控制力矩陀螺群 (SGCMGs) /
- 容错控制 /
- 滑模控制 /
- 自适应控制
Abstract:Based on sliding-mode control and adaptive control, the passive fault-tolerant attitude control problem of rigid spacecraft using single gimbal control moment gyros (SGCMGs) was studied. First, the system mathematical model with fault of the speed of gyro framework was established. Then, a fault-tolerant controller, based on sliding-mode control theory, was designed to control the speed of gyro framework while an adaptive control law was employed in the controller to estimate the fault and disturbance message. Thus, it can achieve the attitude stability control with strong robustness in both defective and trouble-free cases, without knowing the prior information of the fault and disturbance. Finally, the simulation results of different fault modes of two configurations of SGCMGs verify the effectiveness and feasibility of this method.
-
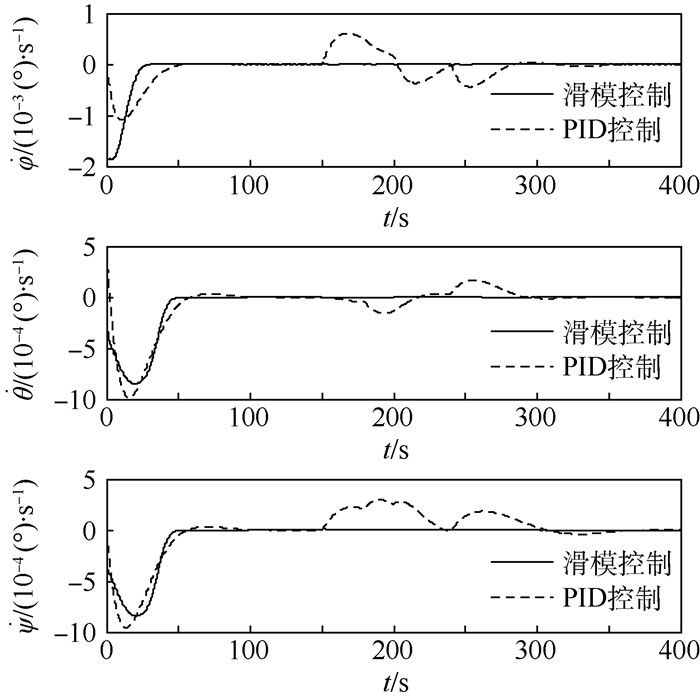
图 2 Case 1故障模式下姿态角速度响应曲线
Figure 2. Attitude angular velocity response under Case 1 fault mode

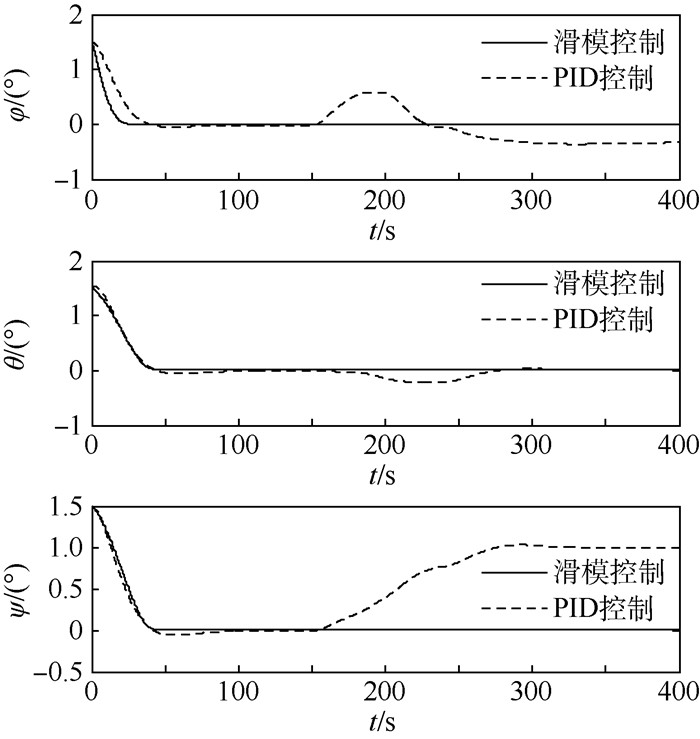
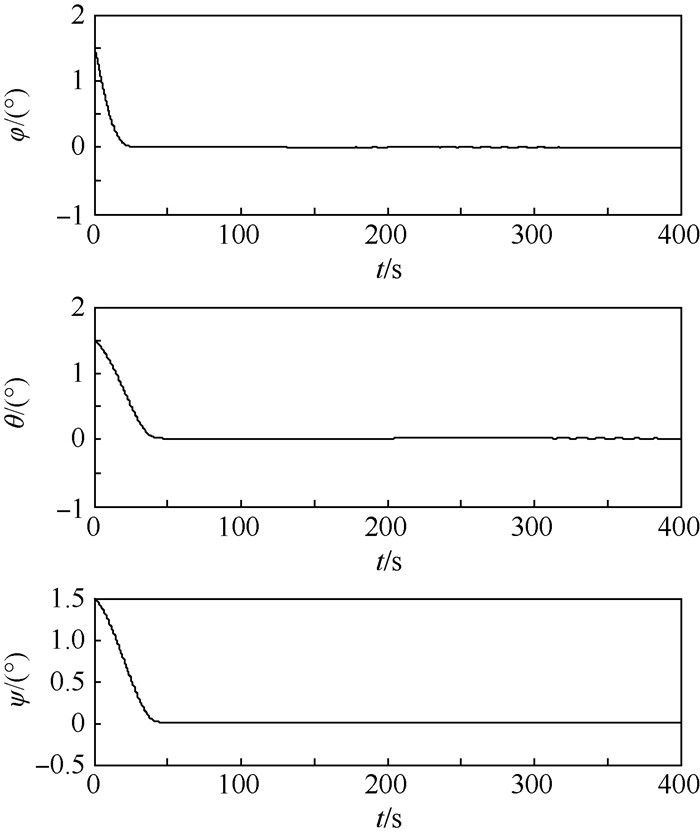
图 5 Case 2故障模式下姿态角速度响应曲线
Figure 5. Attitude angular velocity response under Case 2 fault mode
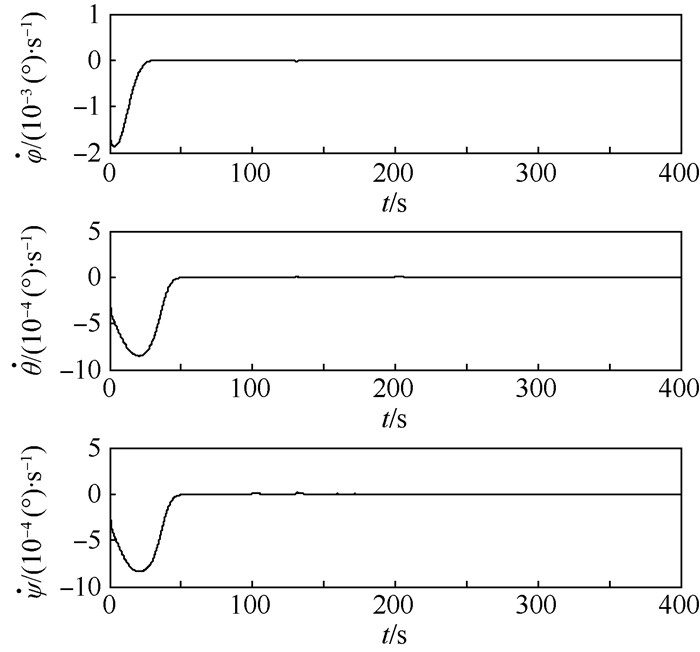
图 8 Case 3故障模式下姿态角速度响应曲线
Figure 8. Attitude angular velocity response under Case 3 fault mode
表 1 PID控制参数
Table 1. Parameters of PID control
参数 滚转通道 俯仰通道 偏航通道 Ki1 Kp1 Kd1 Ki2 Kp2 Kd2 Ki3 Kp3 Kd3 数值 0.1 300 3 000 0.1 500 9 000 0.1 500 9 000  下载: 导出CSV
下载: 导出CSV
-
[1] 葛建华, 孙优贤.容错控制系统的分析与综合[M].杭州:浙江大学出版社, 1994:5-12.GE J H, SUN Y X.Analysis and synthesis of fault-tolerant control systems[M].Hangzhou:Zhejiang University Press, 1994:5-12(in Chinese). [2] 姜斌, 冒泽慧, 杨浩, 等.控制系统的故障诊断与故障调节[M].北京:国防工业出版社, 2009:1-6.JIANG B, MAO Z H, YANG H, et al.Fault diagnosis and fault accommodation for control systems[M].Beijing:National Defense Industry Press, 2009:1-6(in Chinese). [3] HU Q L, XIAO B, ZHANG Y M.Robust fault tolerant attitude stabilization control for flexible spacecraft under partial loss of actuator effectiveness[C]//2010 Conference on Control and Fault Tolerant Systems.Piscataway, NJ:IEEE Press, 2010:263-268. [4] JIANG Y, HU Q L, MA G F.Adaptive backstepping fault-tolerant control for flexible spacecraft with unknown bounded disturbances and actuator failures[J].ISA Transactions, 2010, 49(1):57-69. doi: 10.1016/j.isatra.2009.08.003 [5] JIN J, KO S, RYOO C K.Fault tolerant control for satellites with four reaction wheels[J].Control Engineering Practice, 2008, 16(10):1250-1258. doi: 10.1016/j.conengprac.2008.02.001 [6] XIAO B, HU Q L, ZHANG Y M, et al.Fault-tolerant tracking control of spacecraft with attitude-only measurement under actuator failures[J].Journal of Guidance, Control, and Dynamics, 2014, 37(3):838-849. doi: 10.2514/1.61369 [7] 管宇. 卫星姿态控制系统的鲁棒容错控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2006: 30-46.GUAN Y.Research on fault diagnosis and fault-tolerant control of satellite attitude control system[D].Harbin:Harbin Institute of Technology, 2006:30-46(in Chinese). [8] 贾庆贤, 张迎春, 陈雪芹, 等.卫星姿态控制系统故障重构观测器设计[J].宇航学报, 2016, 37(4):442-450. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201604010.htmJIA Q X, ZHANG Y C, CHEN X Q, et al.Observer design for fault reconstruction in satellite attitude control system[J].Journal of Astronautics, 2016, 37(4):442-450(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201604010.htm [9] CAI W C, LIAO X H, SONG D Y.Indirect robust adaptive fault-tolerant control for attitude tracking of spacecraft[J].Journal of Guidance, Control and Dynamics, 2008, 31(5):1456-1463. doi: 10.2514/1.31158 [10] JIN L, XU S J.Fault tolerant attitude control for small satellites using single gimbal control moment gyros and magnetic torquers[J].Journal of Aerospace Engineering, 2014, 28(3):1-12. doi: 10.1061/%28ASCE%29AS.1943-5525.0000409 [11] ZHANG A H, HU Q L, ZHANG Y M.Observer-based attitude control for satellite under actuator fault[J].Journal of Guidance, Control, and Dynamics, 2015:38(4):806-811. doi: 10.2514/1.G000625 [12] YAN R D, ZHONG W.Disturbance observer-based attitude control of spacecraft with single-gimbal control moment gyros[C]//Proceeding of the 11th World Congress on Intelligent Control and Automation.Piscataway, NJ:IEEE Press, 2014:3107-3111. [13] 欧阳高翔, 倪茂林, 孙承启, 等.航天器的故障建模于应用[J].航天控制, 2011, 29(5):22-29. http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201105005.htmOUYANG G X, NI M L, SUN C Q, et al.The fault modeling and application to aerospace engineering[J].Aerospace Control, 2011, 29(5):22-29(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201105005.htm [14] 史荣昌, 魏丰.矩阵分析[M].北京:北京理工大学出版社, 2010:168-187.SHI R C, WEI F.Matrix analysis[M].Beijing:Beijing Institute of Technology Press, 2010:168-187(in Chinese). [15] WIE B.Singularity analysis and visualization for single-gimbal control moment gyro systems[J].Journal of Guidance, Control, and Dynamics, 2004, 27(2):271-282. doi: 10.2514/1.9167 [16] WIE B.Singularity escape/avoidance steering logic for control moment gyro systems[J].Journal of Guidance, Control and Dynamics, 2005, 28(5):948-958. doi: 10.2514/1.10136 [17] 张爱华, 霍星.航天器执行机构姿态容错控制[M].北京:科学出版社, 2015:53-58.ZHANG A H, HUO X.Actuator attitude fault tolerant control for spacecraft[M].Beijing:Science Press, 2015:53-58(in Chinese). [18] 李力文, 周军, 黄河, 等.附加框架角速度的SGCMG操纵律设计[J].宇航学报, 2014, 35(1):69-75. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201401010.htmLI L W, ZHOU J, HUANG H, et al.Steering law design for SGCMG system based on appending gimbal rates[J].Journal of Astrenautics, 2004, 35(1):69-75(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201401010.htm [19] 张锦江.单框架控制力矩陀螺系统的构型分析和对比研究[J].中国空间科学技术, 2003(3):52-56. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ200303009.htmZHANG J J.Research on configuration analysis and comparison of SGCMG system[J].Chinese Space Science and Technology, 2003(3):52-56(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ200303009.htm -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 1206
- HTML全文浏览量: 345
- PDF下载量: 532
- 被引次数: 0
