



-
摘要:
针对复杂多变的战场环境,无人机(UAV)在执行任务遇到突发威胁时,提出了一种人机合作的实时航迹规划方法。由人决策和分析威胁信息,给出规避方向和任务紧急程度,无人机据此采用模糊推理的方法,自主解算得到引导点的位置,牵引无人机改变航向,规避突发威胁。仿真结果表明,采用人机合作的实时航迹规划可以将人的智能决策和无人机的快速计算能力有机结合起来,规划更加优化的航迹,能动态调整引导点的位置,可根据任务的紧急程度灵活选择规避路径。
Abstract:A human-machine real-time path planning strategy in complex battlefield environment is proposed when unmanned aerial vehicle (UAV) is performing tasks and encounter unexpected threats. Human undertakes the tasks of making decision and analysing threat information, and then sends the messages of direction for evading unexpected threats and emergency degree of task to UAV. UAV independently calculates the position of guide point which attracts UAV to change course, realize the evasion of unexpected threats by adopting fuzzy logic method according to the message that human provides. Simulation result shows that human-machine real-time path planning strategy combines human's intelligent decision-making and UAV's fast calculation ability, optimizes the path under the condition of complex threats, and dynamically adjusts the position of the guide point. Thus evasion path can be flexibly chosen on the basis of the emergency degree of task.
-

图 1 自主航迹规划与人机合作航迹规划方向选择示意图
Figure 1. Schematic diagram of direction selection between autonomous path planning and human-machine cooperative path planning

图 3 引导点与突发威胁之间的几何关系
Figure 3. Geometric relationship between guide point and unexpected threat
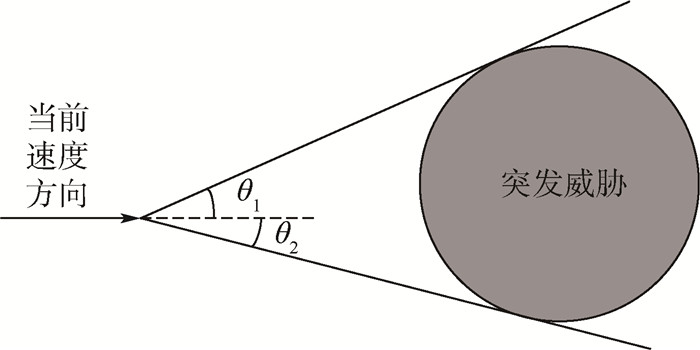
图 5 无人机与威胁边界之间角度关系
Figure 5. Angle relationship between UAV and unexpected threat's border

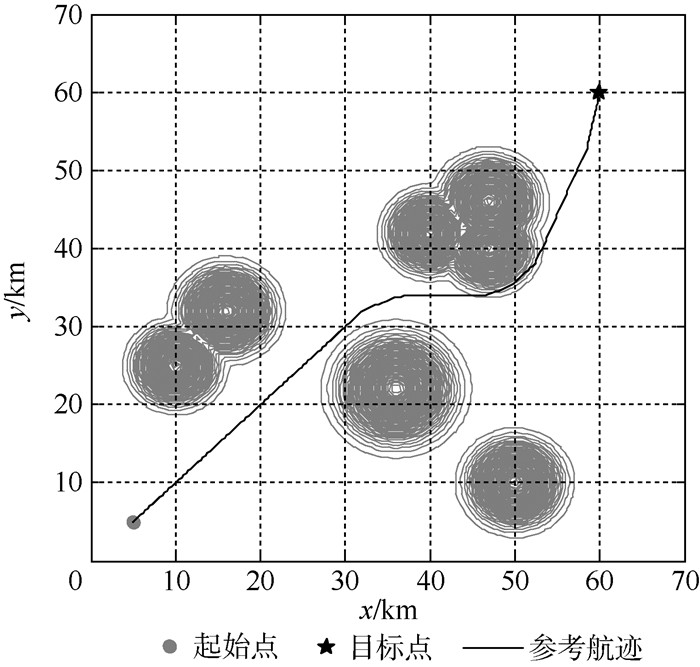
图 8 自主航迹规划与人机合作航迹规划
Figure 8. UAV autonomous path planning and human-machine cooperative path planning

图 9 选择不同规避方向时的实时航迹规划
Figure 9. Real-time path planning when different evasion directions are chosen
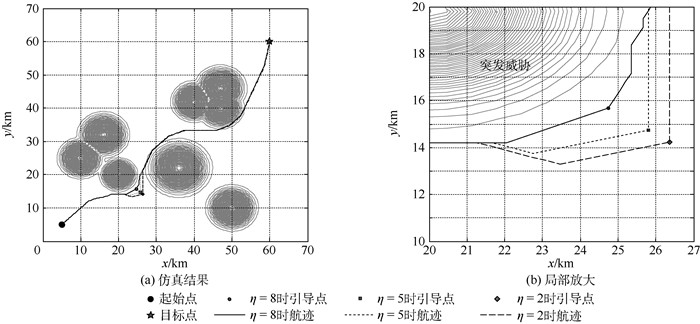
图 10 不同任务紧急程度时引导点的位置
Figure 10. Guide point position with different task emergency levels
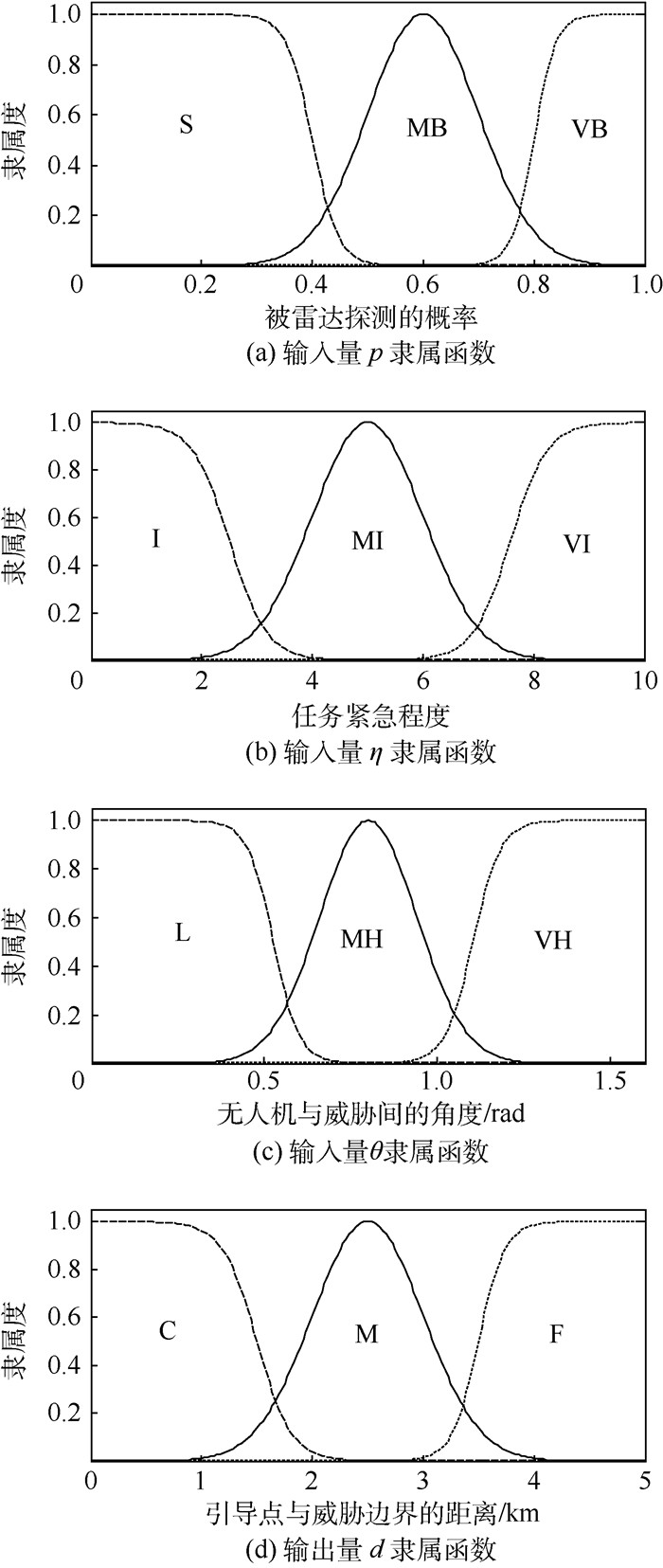
表 1 模糊规则
Table 1. Fuzzy rules
规则序号 输入 输出 p η θ d 1 S I L C 2 S I MH C 3 S I VH C 25 VB VI L M 26 VB VI MH C 27 VB VI VH C  下载: 导出CSV
下载: 导出CSV
表 2 威胁具体信息
Table 2. Specific information of threats
威胁序号 中心坐标/km 作用半径/km 1 (10,25) 6 2 (16,32) 7 3 (36,22) 9 4 (40,42) 6 5 (47,40) 6 6 (47,46) 7 7 (50,10) 7
下载: 导出CSV
表 3 自主航迹规划与人机合作航迹规划引导点位置
Table 3. Position of guide point with autonomous path planning and human-machine cooperative path planning
规划方式 d/km 节点数 时间/s 总航程/km 威胁代价 引导点位置/km 自主航迹规划 1.000 208 0.953 85.996 0.443 (20.300, 14.000) 人机合作航迹规划 1.403 208 1.137 86.724 0.364 (24.742, 15.697)
下载: 导出CSV
表 4 不同规避方向航迹规划结果对比
Table 4. Comparison of path planning results with different evasion directions
规避方向 d/km 节点数 时间/s 总航程/km 威胁代价 引导点位置/km 左侧引导 1.403 185 1.121 82.404 0.595 (15.258, 24.304) 右侧引导 1.403 208 1.137 86.724 0.364 (24.742, 15.697)
下载: 导出CSV
表 5 不同任务紧急程度航迹规划结果对比
Table 5. Comparison of path planning results with different task emergency levels
任务紧急程度 d/km 节点数 时间/s 总航程/km 威胁代价 引导点位置/km η=2 3.595 215 1.144 89.447 0.307 (26.365, 14.224) η=5 2.833 212 1.141 88.390 0.328 (25.800, 14.736) η=8 1.403 208 1.137 86.724 0.364 (24.742,15.697)
下载: 导出CSV
-
[1] 朱大奇, 孙兵, 李利.基于生物启发模型的AUV三维自主路径规划与安全避障算法[J].控制与决策, 2015, 30(5):798-806. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201505004.htmZHU D Q, SUN B, LI L.Algorithm for AUV's 3-D path planning and safe obstacle avoidance based on biological inspired model[J].Control and Decision, 2015, 30(5):798-806(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201505004.htm [2] WEN N F, SU X H, MA P J.Online UAV path planning in uncertain and hostile environments[J].Journal of Machine Learn & Cybernation, 2015, 8(2):1-19. doi: 10.1007%2Fs13042-015-0339-4.pdf [3] 何平川, 戴树岭.一种改进UAV三维航迹实时规划算法[J].北京航空航天大学学报, 2010, 36(10):1248-1251.HE P C, DAI S L.Improved 3-D real-time trajectory algorithm for UAV[J].Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(10):1248-1251(in Chinese). [4] 姚远, 周兴社, 张凯龙, 等.基于稀疏A*搜索和改进人工势场的无人机动态航迹规划[J].控制理论与应用, 2010, 27(7):953-959. http://www.cnki.com.cn/Article/CJFDTotal-KZLY201007022.htmYAO Y, ZHOU X S, ZHANG K L, et al.Dynamic trajectory planning for unmanned aerial vehicle based on sparse A* search and improved artificial potential field[J].Control Theory & Applications, 2010, 27(7):953-959(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-KZLY201007022.htm [5] ZHENG C W, LI L, XU F J, et al.Evolutionary route planner for unmanned air vehicles[J].IEEE Transaction on Robotics, 2005, 21(4):609-620. doi: 10.1109/TRO.2005.844684 [6] HOWITT S L, RICHARDS D.The human machine interface for airborne control of UAVs[C]//2nd AIAA"Unmanned Unlimited"Conference and Workshop and Exhibit 2003.Reston:AIAA, 2003. [7] JOSE M, CANINO R, JESUS G H, et al.Human computer interactions in next-generation of aircraft smart navigation management systems:Task analysis and architecture under an agent-oriented methodological approach[J].Sensors, 2015, 15(3):5228-5250. doi: 10.3390/s150305228 [8] CUMMINGS M L, ANDREW C, CHRISTIN H.The role of human-automation consensus in multiple unmanned vehicle scheduling[J].Human Factors and Ergonomics Society, 2010, 52(1):17-27. doi: 10.1177/0018720810368674 [9] JEAN M H.Towards a cognitive approach to human-machine cooperation in dynamic situations[J].Human-Computer Studies, 2001, 54(4):509-540. doi: 10.1006/ijhc.2000.0454 [10] ANDREW S C, JASON C R, KIMBERLY F, et al.Innovative systems for human supervisory control of unmanned vehicles[C]//Proceedings of the Human Factors and Ergonomics Society 56th Annual Meeting, HFES 2012.Santa Monica, CA:Human Factors an Ergonomics Society Inc., 2012:531-535. [11] 陈军, 张新伟, 徐嘉.有人/无人机混合编队有限干预式协同决策[J].航空学报, 2015, 36(11):3652-3665. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201511016.htmCHEN J, ZHANG X W, XU J.Human/unmanned-aerial-vehicle team collaborative decision-making with limited intervention[J].Acta Aeronautica et Astronautica Sinica, 2015, 36(11):3652-3665(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201511016.htm [12] CUMMINGS M L, MARQUEZ J J, ROY N.Human-automated path planning optimization and decision support[J].Human-Computer Studies, 2012, 70(2):116-128. doi: 10.1016/j.ijhcs.2011.10.001 [13] 史美萍. 基于人机协同的月球车路径规划技术研究[D]. 长沙: 国防科学技术大学, 2006: 20-43.SHI M P.Research on path planning technology for lunar rover based on the human-machine cooperation[D].Changsha:School of National University of Defense Technology, 2006:20-43(in Chinese). [14] 任鹏, 高晓光.人机协同智能航迹规划算法[J].系统仿真学报, 2015, 27(2):313-319. http://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201502014.htmREN P, GAO X G.Man-machine coordinated intelligent flight path planning algorithm[J].Journal of System Simulation, 2015, 27(2):313-319(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201502014.htm [15] 任鹏, 高晓光.有限干预下的UAV低空突防航迹规划[J].系统工程与电子技术, 2014, 36(4):679-684. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201404013.htmREN P, GAO X G.Human intervention flight path planning for UAV low-altitude penetration[J].Systems Engineering and Electronics, 2014, 36(4):679-684(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201404013.htm [16] 谭雁英.基于人机合作策略下的SAS算法的多无人机路径再规划[J].西北工业大学学报, 2014, 32(5):688-692. http://www.cnki.com.cn/Article/CJFDTOTAL-XBGD201405006.htmTAN Y Y.Path replanning approach for multiple UAVs based on SAS algorithm under human automation collaboration[J].Journal of Northwestern Polytechnical University, 2014, 32(5):688-692(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XBGD201405006.htm [17] SUN X X, CAI C.Human-machine cooperation in unmanned aerial vehicle path planning based on cloud model[J].Automatic Target Recognition and Image Analysis, 2011, 8003(1):554-561. [18] 李国勇, 杨丽娟.神经·模糊·预测控制及其MATLAB实现[M].北京:电子工业出版社, 2013:100-112.LI G Y, YANG L J.Neural·fuzzy·predictive control and realization through MATLAB[M].Beijing:Electrics Industry Press, 2013:100-112(in Chinese). [19] 张帅, 李学仁, 张建业, 等.基于动态步长的无人机三维实时航迹规划[J].北京航空航天学报, 2016, 42(12):2745-2754. http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201612026.htmZHANG S, LI X R, ZHANG J Y, et al.UAV 3D real-time path planning based on dynamic step[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(12):2745-2754(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201612026.htm -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 1105
- HTML全文浏览量: 170
- PDF下载量: 8
- 被引次数: 0
