



-
摘要:
针对微小型机器人及无人机系统日益迫切的轻量化视觉导航需求,提出了一种多维几何特征单目视觉三维环境建模方法。单一点特征单目SLAM制图方法地图描述效率相对较低,噪声容忍性能需要进一步提高。将线和面特征引入单目SLAM的三维地图构建过程,提高系统三维空间建模的搜索速度和稳定性。利用快速直线搜索算法,并基于二维直线匹配生成三维空间直线。现有基于三维空间特征点生成最小采样集的J-Linkage算法需要的倾向向量维数较高,完成单目SLAM常见场景三维平面聚类所需的计算量大。通过点线特征结合以及直线增强的J-Linkage算法可以提高特征平面聚类速度和稳定性,减少系统三维空间表达的冗余信息。
Abstract:To meet the self-navigation need of light-weighted robots, e.g. small UAV, we propose a multi-dimensional geometric feature extraction method for monocular SLAM. Feature points based SLAM mapping method is vulnerable to noisy samples and its description efficiency of complex environments needs to be increased. This method introduced the line and plane features to the three-dimensional map building process. It improved the monocular SLAM application system's key frame matching speed and overall stability. A rapid line matching algorithm was implemented, and three-dimensional lines were drawn by two-dimensional lines matching. Traditional space points based J-Linkage method drove its preference set's dimension high, and then remarkable calculation cost was needed for clustering points with multiple models, which is common during monocular SLAM mapping process. An enhanced J-Linkage algorithm was presented for feature plane extraction. With the combination of multi-dimensional geometric features, the reliability monocular SLAM system's mapping process was improved. The representative redundancy of the SLAM applications was reduced.
-
Key words:
- SLAM /
- monocular vision /
- geometrical clustering /
- light-weighted robots /
- UAV
-

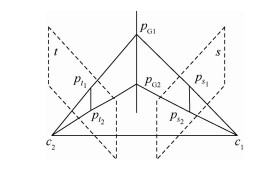
图 3 点线特征对比示意图
Figure 3. Schematic diagram of comparison between feature points and feature lines
-
[1] SMITH R, SELF M, CHEESEMAN P.Estimating uncertain spatial relationships in robotics[M]//COX I J, WILFONG G T.Autonomous robot vehicles.New York:Springer, 1990:167-193. [2] WOODFILL J, ZABIH R.A real-time vision system for robots in unstructured domains[C]//Sensor fusion IV:Control Paradigms and Data Structures.Bellingham, WA:Society of Photo-Optical Instrumentation Engineers, 1992, 1611:346-355. [3] CHONG T J, TANG X J, LENG C H, et al.Sensor technologies and simultaneous localization and mapping (SLAM)[J].Procedia Computer Science, 2015(76):174-179. [4] DAVISON A J.Real-time simultaneous localisation and mapping with a single camera[C]//9th IEEE International Conference on Computer Vision, 2003.Piscataway, NJ:IEEE Press, 2003:1403-1410. [5] DAVISON A J, REID I D, MOLTON N D, et al.MonoSLAM:Real-time single camera SLAM[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6):1052-1067. doi: 10.1109/TPAMI.2007.1049 [6] KLEIN G, MURRAY D.Parallel tracking and mapping for small AR workspaces[C]//6th IEEE and ACM International Symposium on Mixed and Augmented Reality, 2007.Piscataway, NJ:IEEE Press, 2007:225-234. [7] TRIGGS B, MCLAUCHLAN P F, HARTLEY R I, et al.Bundle adjustment:A modern synthesis[M]//TRIGGS B, ZISSERMAN A, SZELISKI R.Vision algorithms:Theory and practice.Berlin:Springer, 1999:298-372. [8] TAN W, LIU H, DONG Z, et al.Robust monocular SLAM in dynamic environments[C]//2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR).Piscataway, NJ:IEEE Press, 2013:209-218. [9] KLEIN G, MURRAY D.Improving the agility of key frame-based SLAM[M]//FORSYTH D, TORR P, ZISSERMAN A.Computer Vision-ECCV 2008.Berlin:Springer, 2008:802-815. [10] SMITH P, REID I D, DAVISON A J.Real-time monocular SLAM with straight lines[C]//Proceedings of the British Machine Vision Conference 2006.London:British Machine Vision Conference, 2006, 6:17-26. [11] ZHOU H, ZOU D, PEI L, et al.StructSLAM:Visual SLAM with building structure lines[J].IEEE Transactions on Vehicular Technology, 2015, 64(4):1364-1375. doi: 10.1109/TVT.2015.2388780 [12] ZHAO L, HUANG S, YAN L, et al.A new feature parametrization for monocular SLAM using line features[J].Robotica, 2015, 33(3):513-536. doi: 10.1017/S026357471400040X [13] JEONG W Y, LEE K M.Visual SLAM with line and corner features[C]//2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway, NJ:IEEE Press, 2006:2570-2575. [14] GEE A P, CHEKHLOV D, CALWAY A, et al.Discovering higher level structure in visual SLAM[J].IEEE Transactions on Robotics, 2008, 24(5):980-990. doi: 10.1109/TRO.2008.2004641 [15] 缪君, 储珺, 张桂梅, 等.基于稀疏点云的多平面场景稠密重建[J].自动化学报, 2015, 41(4):813-822. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201504012.htmMIAO J, CHU J, ZHANG G M, et al.Dense multi-planar scene reconstruction from sparse point cloud[J].Automatica Sinica, 2015, 41(4):813-822(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201504012.htm [16] HARTLEY R, ZISSERMAN A.Multiple view geometry in computer vision[M].Cambridge:Cambridge University Press, 2003:344-352. [17] TOLDO R, FUSIELLO A.Robust multiple structures estimation with j-linkage[M]//FORSYTH D, TORR P, ZISSERMAN A.Computer Vision-ECCV 2008.Berlin:Springer, 2008:537-547. [18] KANAZAWA Y, KAWAKAMI H.Detection of planar regions with uncalibrated stereo using distributions of feature points[C]//Proceedings of the British Machine Vision, Kingston, 2004:1-10. [19] ZULIANI M, KENNEY C S, MANJUNATH B S.The multiransac algorithm and its application to detect planar homographies[C]//IEEE International Conference on Image Processing, 2005.Piscataway, NJ:IEEE Press, 2005, 3:153-159. [20] ZHANG W, KǑSECKÀ J.Nonparametric estimation of multiple structures with outliers[M]//VIDAL R, HEYDEN A, MA Y.Dynamical vision.Berlin:Springer, 2007:60-74. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 954
- HTML全文浏览量: 87
- PDF下载量: 712
- 被引次数: 0
