



Receiver autonomous integrity monitoring based on particle swarm optimization particle filter
-
摘要:
接收机自主完好性监测(RAIM)是航空卫星导航接收机必不可少的功能,为保持全球卫星导航系统(GNSS)在卫星发生故障时系统性能不降级,需要对卫星故障进行检测和隔离。针对接收机观测噪声非高斯分布的特点,提出一种基于粒子群优化粒子滤波(PSO-PF)的故障检测和隔离算法。通过粒子群优化粒子滤波对状态估计进行一致性检验实现故障检测。采集实测数据验证算法的检测性能,并与基于基本粒子滤波的完好性监测算法进行比较,结果表明:本文所提算法在非高斯测量噪声下可检测并隔离全球定位系统(GPS)故障卫星,其性能优于基于基本粒子滤波的完好性监测算法性能,对研究北斗卫星导航系统(BDS)接收机自主完好性监测具有一定的意义。
-
关键词:
- 全球定位系统(GPS) /
- 接收机自主完好性监测(RAIM) /
- 粒子滤波(PF) /
- 故障检测 /
- 粒子群优化(PSO) /
- 北斗卫星导航系统(BDS)
Abstract:Receiver autonomous integrity monitoring (RAIM) is an inseparable part of aviation satellite navigation receiver. Failures or faults due to malfunctions in the global navigation satellite system (GNSS) should be detected and isolated to keep the integrity of the GNSS intact. Because measurement noise does not follow the Gaussian distribution perfectly, a fault detection and exclusion algorithm using the particle swarm optimization particle filter (PSO-PF) was proposed. Failure detection was undertaken by checking the consistency. Through the measured data, the proposed algorithm was compared with that based on PF. The results show that under the condition of non-Gaussian measurement noise, the effectiveness of the proposed approach is illustrated in a problem of global positioning system (GPS) RAIM. Moreover, the performance of the proposed algorithm is better than that based on PF. Meanwhile, the results are instructive for the study of the autonomous integrity monitoring of BeiDou navigation satellite system (BDS).
-

图 2 偏差为15 m时累加LLR值和故障检测判决函数比较
Figure 2. Cumulative LLR and comparison of decision function for fault detection under 15 m step failure
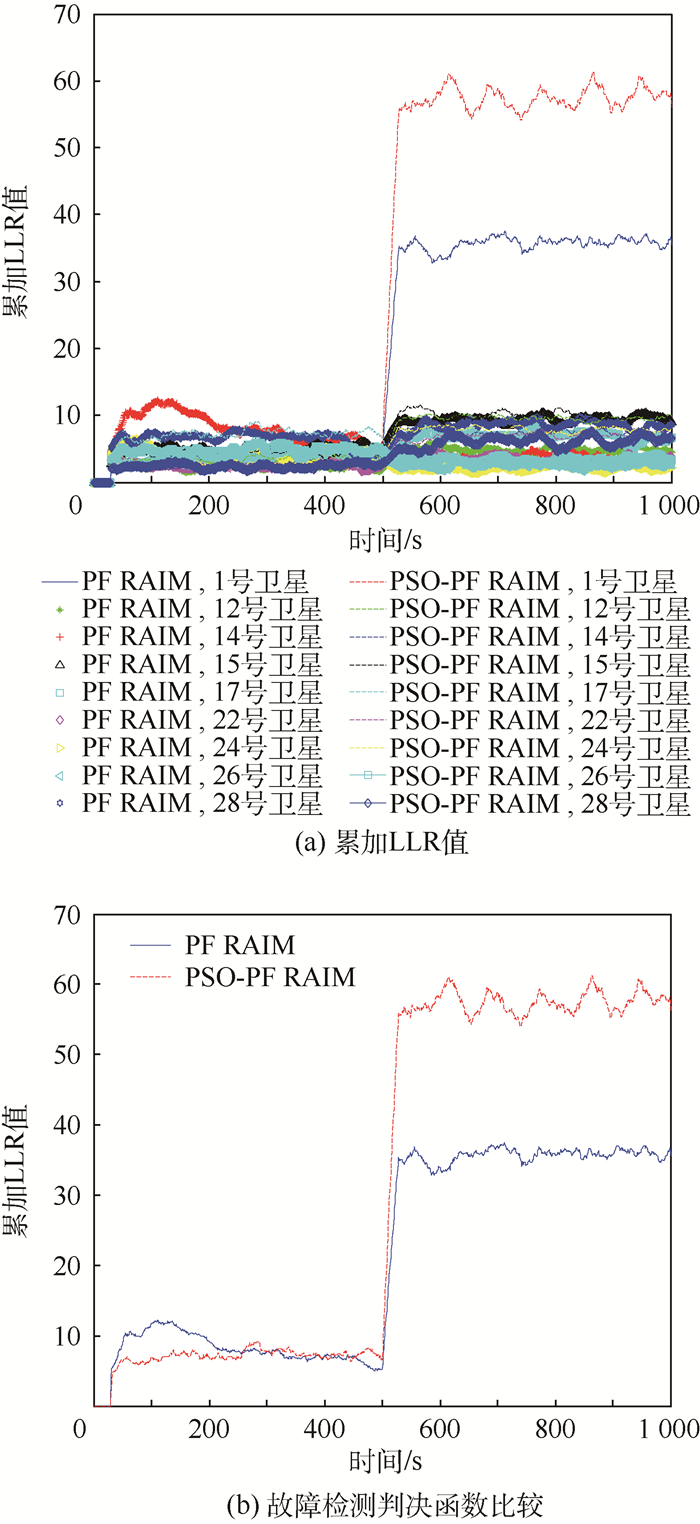
图 3 偏差为20 m时累加LLR值和故障检测判决函数比较
Figure 3. Cumulative LLR and comparison of decision function for fault detection under 20 m step failure

图 4 偏差为30 m时累加LLR值和故障检测判决函数比较
Figure 4. Cumulative LLR and comparison of decision function for fault detection under 30 m step failure
表 1 PSO-PF RAIM算法和PF RAIM算法的故障检测告警时刻比较
Table 1. Comparison of alarm time for fault detection for PSO-PF RAIM algorithm and PF RAIM algorithm
伪距偏差/m 告警时刻/s PSO-PF RAIM算法 PF RAIM算法 15 510 518 20 505 514 30 505 509  下载: 导出CSV
下载: 导出CSV
表 2 不同偏差下PSO-PF RAIM算法和PF RAIM算法的平均有效粒子数(N=50)
Table 2. Average effective number of particles under different bias for PSO-PF RAIM algorithm and PF RAIM algorithm (N=50)
伪距偏差/m 平均有效粒子数 PSO-PF RAIM算法 PF RAIM算法 15 43.8 42.1 20 44.7 42.0 30 44.6 42.8
下载: 导出CSV
-
[1] JOERGER M, CHAN F C, LANGEL S, et al.RAIM detector and estimator design to minimize the integrity risk[C]//Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington, D.C.:ION, 2012:2785-2807. [2] BINJAMMAZ T, AL-BAYATTI A, AL-HARGAN A.GPS integrity monitoring for an intelligent transport system[C]//Proceedings of the 10th Workshop on Positioning Navigation and Communication.Piscataway, NJ:IEEE Press, 2013:1-6. [3] BROCARD P, JULIEN O, MABILLEAU M.Autonomous integrity monitoring proposal for critical rail applications[C]//Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington, D.C.:ION, 2015:706-734. [4] 徐肖豪, 杨传森, 刘瑞华.GNSS用户端自主完好性监测研究综述[J].航空学报, 2013, 34(3):451-463.XU X H, YANG C S, LIU R H.Review and prospect of GNSS receiver autonomous integrity monitoring[J].Acta Aeronautica et Astronautica Sinica, 2013, 34(3):451-463(in Chinese). [5] 孙国良, 孙明菡, 陈金平.时-集综合的接收机自主完好性监测方法研究[J].航空学报, 2006, 27(6):1171-1175.SUN G L, SUN M H, CHEN J P.A study on time and set combined method for receiver integrity autonomous monitoring[J].Acta Aeronautica et Astronautica Sinica, 2006, 27(6):1171-1175(in Chinese). [6] 卢德兼, 陈秀万.GNSS系统接收机自主完好性监测算法[J].计算机工程, 2009, 35(11):10-12.LU D J, CHEN X W.Algorithm for global navigation satellite system receiver autonomous integrity monitoring[J].Computer Engineering, 2009, 35(11):10-12(in Chinese). [7] JOERGER M, PERVAN B.Integrity risk of Kalman filter-based RAIM[C]//Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington, D.C.:ION, 2011:3856-3867. [8] SAYIM B, PERVAN S, PULLEN P, et al.Experimental and theoretical results on the LAAS Sigma overbound[C]//Proceedings of the 15th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington, D.C.:ION, 2002:29-38. [9] YUN Y, KIM D.Integrity monitoring algorithms using filtering approaches for higher navigation performance:Consideration of the non-Gaussian GNSS measurements[C]//Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington, D.C.:ION, 2007:3070-3081. [10] GUSTAFSSON F, GUNNARSSON F, BERGMAN N, et al.Particle filters for positioning, navigation, and tracking[J].IEEE Transactions on Signal Processing, 2002, 50(2):425-437. doi: 10.1109/78.978396 [11] DOUCET A, GODSILL S, ANDRIEU C.On sequential Monte Carlo sampling method for Bayesian filtering[J].Statistics and Computing, 2000, 10(3):197-208. doi: 10.1023/A:1008935410038 [12] ARULAMPALAM M S, MASKELL S, GORDON N, et al.A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J].IEEE Transactions on Signal Processing, 2002, 50(2):174-188. doi: 10.1109/78.978374 [13] 王尔申, 庞涛, 曲萍萍, 等.基于混沌的改进粒子群优化粒子滤波算法[J].北京航空航天大学学报, 2016, 42(5):885-890.WANG E S, PANG T, QU P P, et al.Improved particle filter algorithm based on chaos particle swarm optimization[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(5):885-890(in Chinese). [14] 方正, 佟国峰, 徐心和.基于粒子群优化的粒子滤波定位方法[J].控制理论与应用, 2008, 25(3):533-537. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200803028.htmFANG Z, TONG G F, XU X H.A localization method for particle-filter based on the optimization of particle swarm[J].Control Theory and Application, 2008, 25(3):533-537(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200803028.htm [15] ROSIHAN, INDRIYATMOKO A, CHUN S, et al.Particle filtering approach to fault detection and isolation for GPS integrity monitoring[C]//Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington D.C.:ION, 2006:873-881. [16] KAPLAN E, HEGARTY C.Understanding GPS:Principles and application[M].2nd ed.London:Artech House, 2006:39-45. [17] 王尔申, 张淑芳, 蔡明, 等.遗传粒子滤波的GPS接收机自主完好性监测[J].西安电子科技大学学报(自然科学版), 2015, 42(1):136-141. http://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201501023.htmWANG E S, ZHANG S F, CAI M, et al.GPS receiver autonomous integrity monitoring algorithm using the genetic particle filter[J].Journal of Xidian University (Natural Science), 2015, 42(1):136-141(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201501023.htm [18] KADIRKANATHAN V, LI P, JAWARD M H, et al.Particle filtering based fault detection in non-linear stochastic systems[J].International Journal of Systems Science, 2002, 33(4):259-265. doi: 10.1080/00207720110102566 [19] WEI T, HUANG Y, CHEN C L P.Adaptive sensor fault detection and identification using particle filter algorithms[J].IEEE Transactions on Systems, Man, and Cybernetics.Part C-Applications and Reviews, 2009, 39(2):201-213. doi: 10.1109/TSMCC.2008.2006759 [20] LI P, KADIRKAMANATHAN V.Particle filtering based likelihood ratio approach to fault diagnosis in nonlinear stochastic systems[J].IEEE Transactions on Systems, Man, and Cybernetics.Part C-Applications and Reviews, 2001, 31(3):337-343. doi: 10.1109/5326.971661 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 816
- HTML全文浏览量: 85
- PDF下载量: 563
- 被引次数: 0
