



-
摘要:
针对传统的捷联惯性/天文(SINS/CNS)组合导航系统不能精确估计加速度计偏置而导致导航误差发散的问题,提出一种基于星光折射间接敏感地平的捷联惯性/天文(SINS/RCNS)组合导航方法。利用星敏感器测量星光折射角,结合大气折射模型得到的折射视高度来抑制位置误差的发散。推导了基于星光折射新的量测方程,分析了折射星数目与导航精度的关系,当使用多颗折射星时能够精确估计加速计偏置,从而能够完全抑制位置误差的发散,并对系统进行可观测性分析。通过卡尔曼滤波实现了状态估计。仿真结果表明:本文方法的导航精度优于传统方法,有效抑制了位置误差的发散,验证了本文方法的有效性。
Abstract:Considering that traditional strap-down inertial/celestial integrated navigation system (SINS/CNS) cannot accurately estimate the accelerometer bias, which can cause the divergence of navigation errors, a strap-down inertial/celestial integrated navigation method based on the stellar refraction (SINS/RCNS) was proposed. The starlight refraction angle obtained from the stellar sensor and the apparent height obtained from atmospheric refraction model were combined to inhibit the divergence of position error. A novel measurement equation based on stellar refraction was developed and the relationship between the number of used refraction stars and navigation accuracy was analyzed. When multiple refraction stars are used, the proposed method can accurately estimate the accelerometer bias so that the position errors can be inhibited completely, and its observability was analyzed. The estimation of the state of system was realized through the Kalman filter. The simulation results indicate that the precision of navigation based on the proposed method is better than that of the traditional method and inhibits the divergence of the position error effectively, which shows the validation of the proposed method.
-
Key words:
- starlight refraction /
- apparent height /
- atmospheric refraction model /
- navigation error /
- Kalman filter
-

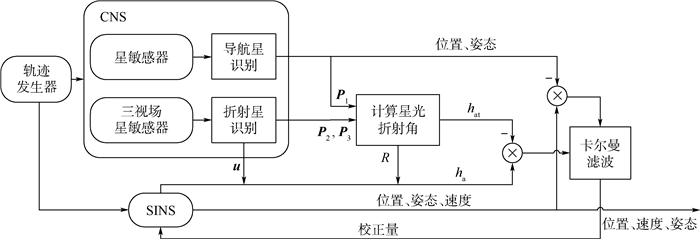
图 3 SINS/RCNS组合导航系统工作原理
Figure 3. Operating principle of SINS/RCNS integrated navigation system

图 4 本文SINS/RCNS组合导航方法与传统SINS/CNS组合导航方法姿态误差对比
Figure 4. Attitude error contrast between SINS/RCNS integrated navigation method and traditional SINS/CNS integrated navigation method

图 5 使用1颗折射星时本文SINS/RCNS组合导航方法与传统SINS/CNS组合导航方法比较
Figure 5. Contrast between SINS/RCNS integrated navigation method by using one refraction star and traditional SINS/CNS integrated navigation method

图 6 使用本文SINS/RCNS组合导航方法时加速度计偏置估计
Figure 6. Estimation of accelerometer bias when using SINS/RCNS integrated navigation method
表 1 使用不同数目折射星时对系统可观测性的影响
Table 1. Influence of using different numbers of refraction star on system observability
使用的折射星数目 SOM秩 Ⅰ时间段 Ⅱ时间段 Ⅲ时间段 0 6 6 6 1 11 11 11 2 14 14 14 3 15 15 15 4 15 15 15 5 15 15 15 6 15 15 15  下载: 导出CSV
下载: 导出CSV
表 2 使用不同数目折射星时导航误差统计结果
Table 2. Navigation error statistical results when different numbers of refraction star are used
使用的折射星数目 x轴位置误差/m y轴位置误差/m z轴位置误差/m 均值 方差 均值 方差 均值 方差 1 99.2 68.7 106.8 72.4 -106.3 82.4 2 91.1 53.8 98.3 42.7 -98.4 61.4 3 83.7 27.3 88.5 22.8 -82.4 21.6 4 80.4 22.6 82.7 21.9 -80.2 19.6 5 79.2 21.9 81.6 18.6 -81.2 20.1 6 78.8 19.5 79.4 19.9 -79.8 19.8 7 78.6 18.9 78.7 18.7 -77.3 20.8
下载: 导出CSV
-
[1] 吕沧海, 冯艳, 师海涛.中远程导弹组合导航技术[M].北京:国防工业出版社, 2014:1-3.LV C H, FENG Y, SHI H T.Middle-long-range missile integrated navigation technology[M].Beijing:National Defense Industry Press, 2014:1-3(in Chinese). [2] 全伟, 刘百奇, 宫晓琳, 等.惯性/天文/卫星组合导航技术[M].北京:国防工业出版社, 2011:1-2.QUAN W, LIU B Q, GONG X L, et al.INC/CNS/GNSS integrated navigation technology[M].Beijing:National Defense Industry Press, 2011:1-2(in Chinese). [3] 王鑫, 王新龙.弹道导弹SINS/CNS组合导航系统建模与性能仿真[J].航空兵器, 2015(2):21-25. http://www.cnki.com.cn/Article/CJFDTOTAL-HKBQ201502004.htmWANG X, WANG X L.System modeling and performance simulation on SINS/CNS integrated navigation system for ballistic missile[J].Aero Weaponry, 2015(2):21-25(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKBQ201502004.htm [4] YANG L H, LI B, GE L.A novel SINS/CNS integrated navigation algorithm used in a ballistic missile[J].International Journal of Security and Its Applications, 2015, 9(9):65-76. doi: 10.14257/ijsia [5] 张承, 熊智, 王融, 等.直接敏感地平的空天飞行器惯性/天文组合方法[J].中国空间科学技术, 2013, 33(3):64-71. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201303012.htmZHANG C, XIONG Z, WANG R, et al.New INS/CNS integrated algorithm on aerospace vehicle with directly sensing horizon[J].Chinese Space Science and Technology, 2013, 33(3):64-71(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201303012.htm [6] JAMSHAID A, FANG J C.Realization of an autonomous integrated suite of strap-down astro-inertial navigation systems using unscented particle filtering [J].Computers and Mathematics with Applications, 2009, 57(2):169-183. doi: 10.1016/j.camwa.2008.07.042 [7] QUAN W, FANG J C, XU F, et al.Hybrid simulation system study of SINS/CNS integrated navigation[J].IEEE Aerospace & Electronic Systems Magazine, 2008, 23(2):17-24. http://ieeexplore.ieee.org/document/4460727/keywords [8] WANG X L, MA S.A celestial analytic positioning method by stellar horizon atmospheric refraction[J].Chinese Journal of Aeronautics, 2009, 22(3):293-300. doi: 10.1016/S1000-9361(08)60102-8 [9] NING X L, FANG J C.A new autonomous celestial navigation method for the lunar rover[J].Robotics and Autonomous Systems, 2009, 57(1):48-54. doi: 10.1016/j.robot.2008.02.006 [10] QIAN H M, SUN L, CAI J N, et al.A starlight refraction scheme with single star sensor used in autonomous satellite navigation system[J].Acta Astronautica, 2014, 96(1):45-52. http://www.sciencedirect.com/science/article/pii/S0094576513004311?via%3Dihub [11] 宁晓琳, 王龙华, 白鑫贝, 等.一种星光折射卫星自主导航系统方案设计[J].宇航学报, 2012, 33(11):1601-1610. doi: 10.3873/j.issn.1000-1328.2012.11.007NING X L, WANG L H, BAI X B, et al.A scheme design of satellite autonomous navigation system based on stellar refraction[J].Journal of Astronautics, 2012, 33(11):1601-1610(in Chinese). doi: 10.3873/j.issn.1000-1328.2012.11.007 [12] WANG X L, XIE J, MA S.Starlight atmospheric refraction model for a continuous range of height[J].Journal of Guidance, Control, and Dynamics, 2010, 33(2):634-637. doi: 10.2514/1.39499 [13] NING X L, WANG L H, BAI X B, et al.Autonomous satellite navigation using starlight refraction angle measurements[J].Advances in Space Research, 2013, 51(9):1761-1772. doi: 10.1016/j.asr.2012.12.008 [14] XU F, FANG J C.Velocity and position error compensation using strap-down inertial navigation system/celestial navigation system integration based on ensemble neural network[J].Aerospace Science & Technology, 2008, 12(4):302-307. [15] 宁晓琳, 蔡洪炜, 吴伟仁, 等.月球车的惯性/天文组合导航新方法[J].系统工程与电子技术, 2011, 33(8):1837-1844. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201108032.htmNING X L, CAI H W, WU W R, et al.INS/CNS integrated navigation method for lunar rover[J].Systems Engineering and Electronics, 2011, 33(8):1837-1844(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201108032.htm [16] 房建成, 宁晓琳.天文导航原理及应用[M].北京:北京航空航天大学出版社, 2006:185-190.FANG J C, NING X L.Principle and application of celestial navigation[M].Beijing:Beihang University Press, 2006:185-190(in Chinese). [17] 秦永元, 张洪钺, 汪淑华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社, 2012:80-84.QIN Y Y, ZHANG H Y, WANG S H.Kalman filter and principle of integrated navigation[M].Xi'an:Northwestern Polytechnical University Press, 2012:80-84(in Chinese). [18] GOSHEN-MESKIN D, BAR-IZHACK I Y.Observability analysis of piece-wise constant system-PartⅠ:Theory[J].IEEE Transactions on Aerospace and Electronics Systems, 1992, 28(4):1056-1067. doi: 10.1109/7.165367 [19] GOSHEN-MESKIN D, BAR-IZHACK I Y.Observability analysis of piece-wise constant system-PartⅡ:Application to inertial navigation in-flight alignment[J].IEEE Transactions on Aerospace and Electronics Systems, 1992, 28(4):1068-1075. doi: 10.1109/7.165368 -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 1204
- HTML全文浏览量: 102
- PDF下载量: 541
- 被引次数: 0
