



-
摘要:
针对存在干扰力矩的航天器姿态控制问题,从能量角度提出一种基于端口受控哈密顿(PCH)系统模型的无源控制方法。通过将姿态控制系统表示为PCH形式,并增加与姿态误差积分有关的状态,利用互联和阻尼分配无源控制(IDA-PBC)方法进行控制器设计,使得闭环系统具有期望的内部互连结构关系和能量耗散特性,所提出的控制方案能保证系统的输入-状态稳定性。进一步,考虑执行器的动态特性,利用反步法对控制指令进行补偿设计,结合指令滤波技术避免对虚拟控制量高阶导数的计算,并从理论上证明了闭环系统一致最终有界。仿真结果验证了本文所提控制方法相比于单独基于无源性控制方法的性能优势。
Abstract:For the spacecraft attitude control problem in the presence of disturbance torques, a passivity control scheme based on port-controlled Hamiltonian (PCH) system model was proposed from the perspective of energy. By writing the attitude control system in a PCH form and adding the state related to integral of attitude error, the interconnection and damping assignment passivity-based control (IDA-PBC) method was then utilized to design the controller and provide the closed-loop system with desired internal interconnection structure and energy dissipativity properties. The proposed control scheme can guarantee input-to-state stability of closed-loop system. The actuator dynamics was then considered and backstepping control scheme was utilized to compensate for control command. Combined with command filtering technique, the computation of higher order derivatives of virtual control was avoided and uniform ultimate boundedness of the closed-loop system was proved theoretically. Simulation results validate the performance advantage of the proposed control scheme over that based on passivity alone.
-
Key words:
- spacecraft /
- attitude control /
- Hamiltonian system /
- passivity /
- damping assignment
-
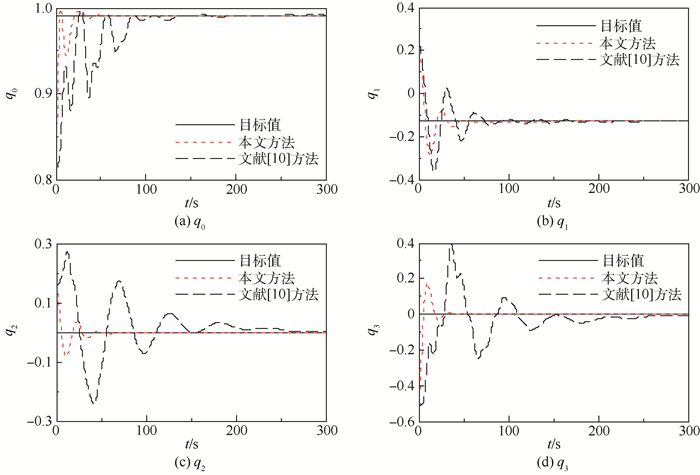
图 1 四元数变化曲线(不考虑执行器动态特性)
Figure 1. Variation curves of quaternion (without consideration of actuator dynamics)
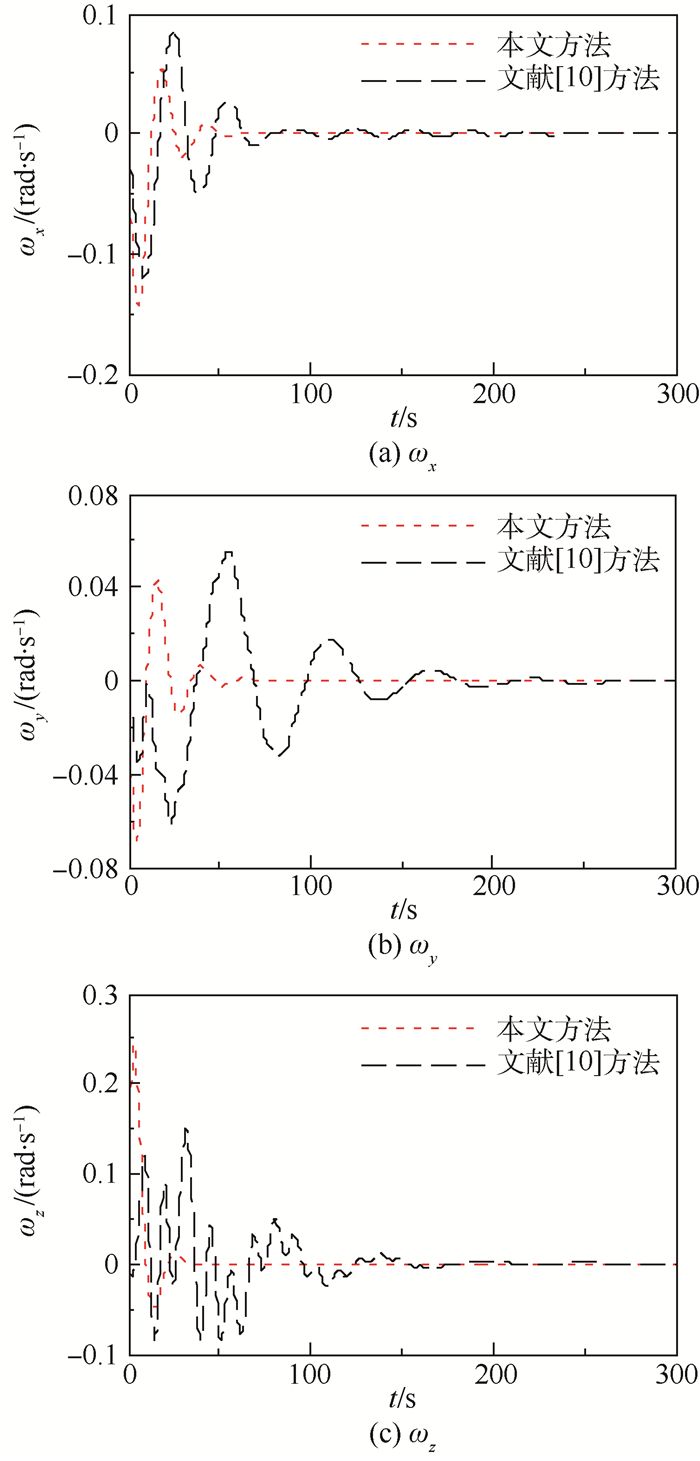
图 2 角速度变化曲线(不考虑执行器动态特性)
Figure 2. Variation curves of angular rate(without consideration of actuator dynamics)

图 3 姿态控制力矩变化曲线(不考虑执行器动态特性)
Figure 3. Variation curves of attitude control torque(without consideration of actuator dynamics)

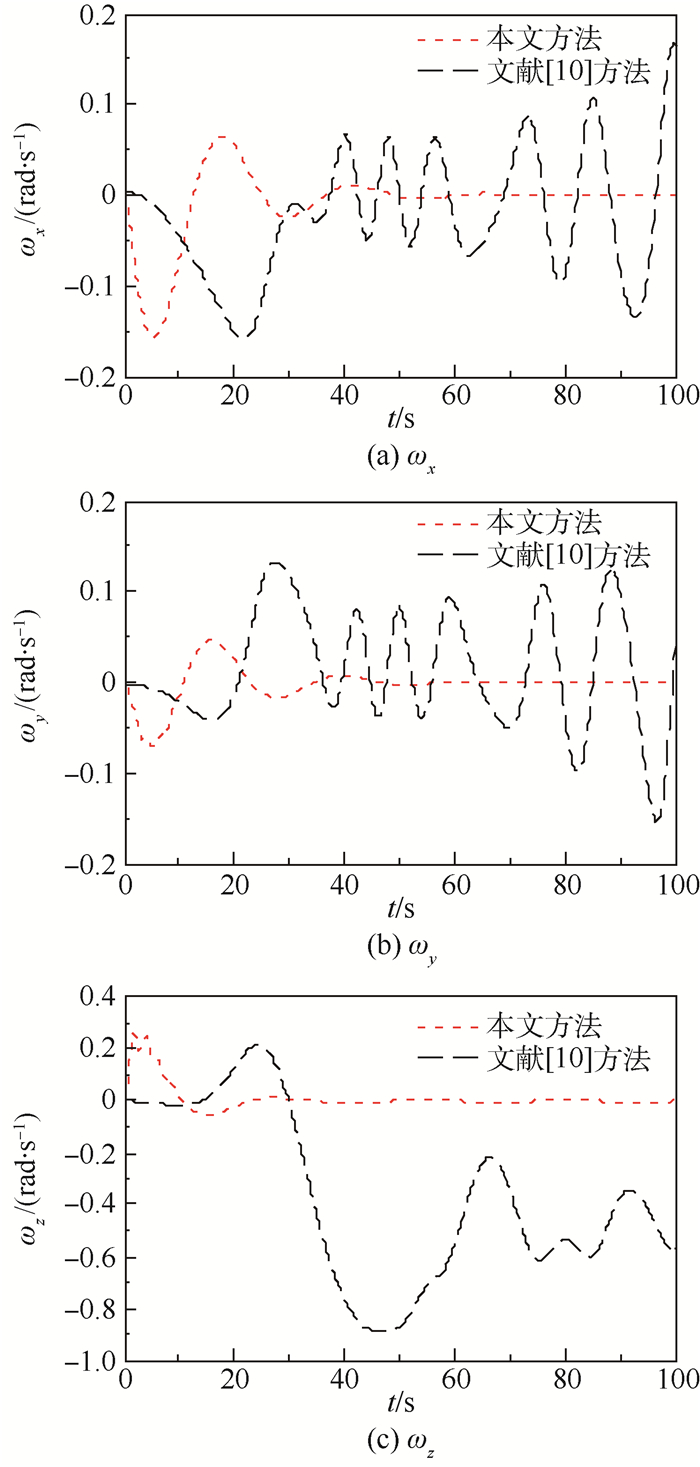
图 4 四元数变化曲线(考虑执行器动态特性)
Figure 4. Variation curves of quaternion(with consideration of actuator dynamics)
-
[1] LEE T.Global exponential attitude tracking controls on SO3[J].IEEE Transactions on Automatic Control, 2015, 60(10):2837-2842. doi: 10.1109/TAC.2015.2407452 [2] DE ANGELIS E L, GIULIETTI F, DE RUITER A H J, et al.Spacecraft attitude control using magnetic and mechanical actuation[J].Journal of Guidance, Control, and Dynamics, 2016, 39(3):564-573. doi: 10.2514/1.G000957 [3] RODRIQUEZ-VAZQUEZ A L, MARTIN-PRATS M A, BERNELLI-ZAZZERA F.Spacecraft magnetic attitude control using approximating sequence Riccati equations[J].IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4):3374-3385. doi: 10.1109/TAES.2015.130478 [4] ALI I, RADICE G, KIM J.Backstepping control design with actuator torque bound for spacecraft attitude maneuver[J].Journal of Guidance, Control, and Dynamics, 2010, 33(1):254-259. doi: 10.2514/1.45541 [5] ZHANG H, FANG J.Robust backstepping control for agile satellite using double-gimbal variable-speed control moment gyroscope[J].Journal of Guidance, Control, and Dynamics, 2013, 36(5):1356-1363. doi: 10.2514/1.59327 [6] ZHU Z, XIA Y Q, FU M Y.Adaptive sliding mode control for attitude stabilization with actuator saturation[J].IEEE Transactions on Industrial Electronics, 2011, 58(10):4898-4907. doi: 10.1109/TIE.2011.2107719 [7] LU K F, XIA Y Q, ZHU Z, et al.Sliding mode attitude tracking of rigid spacecraft with disturbances[J].Journal of the Franklin Institute, 2012, 349(2):413-440. doi: 10.1016/j.jfranklin.2011.07.019 [8] WANG X K, YU C B.Unit dual quaternion-based feedback linearization tracking problem for attitude and position dynamics[J].Systems & Control Letters, 2013, 62(3):225-233. [9] BAJODAH A H.Asymptotic generalised dynamic inversion attitude control[J].IET Control Theory & Applications, 2010, 4(5):827-840. [10] FORBES J R.Passivity-based attitude control on the special orthogonal group of rigid-body rotations[J].Journal of Guidance, Control, and Dynamics, 2013, 36(6):1596-1605. doi: 10.2514/1.59270 [11] WANG H L, XIE Y C.Passivity based attitude control of rigid bodies[J].Asian Journal of Control, 2014, 16(3):802-817. doi: 10.1002/asjc.2014.16.issue-3 [12] PARK Y.Robust and optimal attitude control of spacecraft with disturbances[J].International Journal of Systems Science, 2015, 46(7):1222-1233. doi: 10.1080/00207721.2013.815824 [13] ORTEGA R, VAN DER SCHAFT A, MASCHKE B, et al.Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems[J].Automatica, 2002, 38(4):585-596. doi: 10.1016/S0005-1098(01)00278-3 [14] JELTSEMA D, ORTEGA R, SCHERPEN J M A.An energy-balancing perspective of interconnection and damping assignment control of nonlinear systems[J].Automatica, 2004, 40(9):1643-1646. doi: 10.1016/j.automatica.2004.04.007 [15] ACOSTA J A, ORTEGA R, ASTOLFI A, et al.Interconnection and damping assignment passivity-based control of mechanical systems with underactuation degree one[J].IEEE Transactions on Automatic Control, 2005, 50(12):1936-1955. doi: 10.1109/TAC.2005.860292 [16] BATLLE C, DÒRIA-CEREZO A, ESPINOSA-PEREZ G, et al.Simultaneous interconnection and damping assignment passivity-based control:The induction machine case study[J].International Journal of Control, 2009, 82(2):241-255. doi: 10.1080/00207170802050817 [17] DONAIRE A, PETER T.Dynamic positioning of marine craft using a port-Hamiltonian framework[J].Automatica, 2012, 48(5):851-856. doi: 10.1016/j.automatica.2012.02.022 [18] ZENG J W, ZHANG Z, QIAO W.An interconnection and damping assignment passivity-based controller for a DC-DC boost converter with a constant power load[J].IEEE Transactions on Industry Applications, 2014, 50(4):2314-2322. doi: 10.1109/TIA.2013.2290872 [19] CRASTA N, ORTEGA R, PILLAI H K.On the matching equations of energy shaping controllers for mechanical systems[J].International Journal of Control, 2015, 88(9):1757-1765. doi: 10.1080/00207179.2015.1016453 [20] AOKI T, YAMASHITA Y, TSUBAKINO D.Vibration suppression for mass-spring-damper systems with a tuned mass damper using interconnection and damping assignment passivity-based control[J].International Journal of Robust and Nonlinear Control, 2016, 26(2):235-251. doi: 10.1002/rnc.3307 [21] NUNNA K, SASSANO M, ASTOLFI A.Constructive interconnection and damping assignment for port-controlled Hamiltonian systems[J].IEEE Transactions on Automatic Control, 2015, 60(9):2350-2361. doi: 10.1109/TAC.2015.2400663 [22] ROMERO J G, DONAIRE A, ORTEGA R.Robust energy shaping control of mechanical systems[J].Systems & Control Letters, 2013, 62(9):770-780. [23] KRISTIANSEN R, HAGEN D.Modelling of actuator dynamics for spacecraft attitude control[J].Journal of Guidance, Control, and Dynamics, 2009, 32(3):1022-1025. doi: 10.2514/1.42574 [24] HU Q L, XIAO B, WANG D W, et al.Attitude control of spacecraft with actuator uncertainty[J].Journal of Guidance, Control, and Dynamics, 2013, 36(6):1771-1776. doi: 10.2514/1.58624 [25] DONG W, FARRELL J A, POLYCARPOU M M, et al.Command filtered adaptive backstepping[J].IEEE Transactions on Control Systems Technology, 2012, 20(3):566-580. doi: 10.1109/TCST.2011.2121907 [26] KHALIL H K. 非线性系统[M]. 朱义胜, 董辉, 李作洲, 等译. 3版. 北京: 电子工业出版社, 2011: 96-118.KHALIL H K.Nonlinear systems[M].ZHU Y S, DONG H, LI Z Z, et al, translated.3rd ed.Beijing:Publishing House of Electronics Industry, 2011:96-118(in Chinese). [27] ZOU Y, ZHENG Z.A robust adaptive RBFNN augmenting backstepping control approach for a model-scaled helicopter[J].IEEE Transactions on Control Systems Technology, 2015, 23(6):2344-2352. doi: 10.1109/TCST.2015.2396851 [28] SUN L, ZUO Z.Nonlinear adaptive trajectory tracking control for a quad-rotor with parametric uncertainty[J].Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2015, 229(9):1709-1721. doi: 10.1177/0954410014558692 [29] ZHU B, WANG Q, HUO W.Longitudinal-lateral velocity control design and implementation for a model-scaled unmanned helicopter[J].Nonlinear Dynamics, 2014, 76(2):1579-1589. doi: 10.1007/s11071-013-1230-z -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 882
- HTML全文浏览量: 123
- PDF下载量: 566
- 被引次数: 0
